











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introducción
Las personas con amputación transtibial carecen del segmento corporal por debajo de la rodilla, esto como consecuencia de enfermedades, malformaciones congénitas, accidentes o traumas. En países con conflicto armado interno, como es el caso de Colombia, una causa de amputación transtibial por trauma son las minas antipersonales; estos artefactos explosivos son “sembrados” en zonas rurales del territorio nacional y explotan al contacto, produciendo la muerte del individuo o heridas que conducen a la extirpación de diferentes partes del cuerpo, siendo la amputación transtibial un caso recurrente 1. Al tener reducción de tejido óseo y muscular en la extremidad inferior amputada, los individuos presentan disparidad entre los miembros inferiores y traslación del centro de masa, haciendo que se afecte el centro de presión (CoP) y la EPE, de allí que tengan mayor número de caídas que las personas no amputadas y su vida social se vea afectada, pues el miedo a las caídas restringe la actividad física, el estado funcional e incide en síntomas depresivos 2,3.
La EPE hace referencia al mantenimiento del equilibrio afectado por el campo gravitacional, es la base de la estabilidad y por tanto primordial en la realización de movimientos esenciales de la vida diaria, incide de forma directa en las transiciones de postura usuales, entre las que se encuentran: la caminata, sentarse, ponerse de pie, agacharse, correr, por citar algunas. Este fenómeno complejo de control requiere mantener el equilibrio en concordancia con el campo gravitacional, para esto realiza ajustes permanentes del centro de presión (CoP) dentro de la base de soporte o del polígono de sustentación creado por los pies 4,5. Las adecuaciones del sistema de control involucran información proveniente de procesos sensoriomotores dinámicos de los sistemas propioceptivo, visual y vestibular, que se integran para causar una salida motora, actuando sobre la parte músculo-esquelética requerida 6-8.
El comportamiento del CoP se encuentra íntimamente ligado a la estabilidad y al control. El estudio de las variaciones en el CoP, tanto en desplazamiento como en velocidad, es el método más empleado en la evaluación de la estabilidad postural de los seres humanos. Se debe recordar que el CoP es el punto donde actúan las fuerzas de reacción verticales del suelo, representa el promedio ponderado de todas las presiones sobre el cuerpo en contacto con el suelo; para su registro se emplean plataformas de fuerza y plantillas instrumentadas. La cuantificación de la EPE en los individuos permite determinar la existencia de alteraciones clínicas, y por ende la determinación del riesgo de caídas, trastornos neuromusculares, determinación de patologías musculoesqueléticas, conocimiento de la correcta alineación de una prótesis de miembro inferior, entre otras 9-12.
Existen diferentes técnicas para la exploración de la EPE; a partir del registro del CoP se pueden extraer parámetros lineales (excursión, amplitud, rango, etc.), no lineales (la transformada discreta de wavelet y la energía relativa) y los relacionados con los aspectos temporales de la trayectoria del centro de presión (exponente de Lyapunov, el exponente de Hurst y la entropía); en el dominio de la frecuencia se utiliza el análisis armónico de la señal no estacionaria 11-13. Se ha demostrado que estos métodos de análisis son sensibles a diversas condiciones de salud; sin embargo, no es evidente cuál es el óptimo, pues una buena medida de CoP debe diferenciar niveles de estabilidad y, al mismo tiempo, ser repetible para el mismo nivel de estabilidad. El análisis del CoP usando la técnica de agrupación (clustering) es novedoso; a la fecha solo se ha utilizado para examinar la repetibilidad y diferenciabilidad de diferentes niveles de condiciones de estabilidad en sujetos sanos empleando como medida de similitud el coeficiente de Silhouette 7.
En este estudio, el desempeño de las medidas de CoP, desplazamiento y velocidad, se evalúa empleando análisis de la técnica de agrupación (clustering) para comparar dos grupos, uno de no amputados (grupo control) y uno de personas con amputación (grupo amputados). La medida de similitud intraclúster e interclúster se basa en la cantidad de información transmitida desde las entradas hasta la salida de las variables examinadas.
Técnica de agrupamiento (Clustering)
El fundamento de la técnica de clúster o agrupamiento (en inglés clustering) es crear conjuntos de datos con características similares para obtener grupos naturales llamados clúster, los cuales simbolizan los estados válidos de un sistema de variables. Los clústeres son subconjuntos disjuntos del conjunto de datos con la propiedad tal de que los datos pertenecientes a diferentes grupos difieren entre sí mucho más que los datos que pertenecen al mismo grupo 14,15. Por las bondades exhibidas, el agrupamiento se ha utilizado en diversos campos, por ejemplo, en medicina para caracterizar el centro de gravedad de un grupo de personas 7. Una excelente medida de la estabilidad de un algoritmo debe maximizar las distancias entre grupos (mayor capacidad para diferenciar los grupos de estudio) y minimizar las distancias intra-grupales (mayor repetibilidad). La cuantificación de distancias entre datos se realiza con el uso de variados métodos, uno de ellos es el mapa de información, donde se explora la cantidad de información existente entre cada dato tomando como base la teoría matemática de la información expuesta por Shannon. Así, la cantidad de información englobada en los diferentes grupos es lo más semejante para todos los miembros del grupo, mientras que, al mismo tiempo, la diferencia entre grupos es lo más grande posible; hasta el momento es un método poco utilizado como medida de similitud 16,17.
Para el uso de la teoría de la información se equipará un sistema, independiente del tipo, con una estructura de comunicación que contiene una fuente de información, el canal de transmisión, el destino y ruido (Figura 1). Donde la fuente de información genera señales o mensajes para ser enviados a un destino, estos mensajes se pueden considerar una serie de datos que contienen información de la variable de salida, si es de tipo temporal se tendrá una función, donde es el conjunto de datos dependientes del tiempo. El canal de transmisión es el medio empleado para el envío de la señal y permite comprender la relación entre las entradas y las salidas del sistema. El destino es la salida del sistema, que se comporta de determinada forma dependiendo de las entradas. El ruido es un error aleatorio o una variación en una variable que interfiere con la señal transmitida haciendo que la salida se altere 18,19.
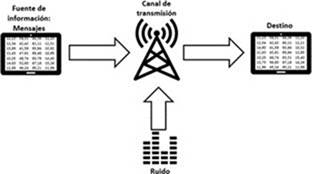
Shannon 20 estableció que la cuantificación de la información se puede realizar a través de la entropía, definida para este campo como el valor esperado del contenido de información que representa la mínima cantidad de bits necesarios al transmitir un mensaje 1.
Metodología
Esta investigación fue revisada y aprobada por el Comité de Bioética de la Universidad Distrital Francisco José de Caldas, Bogotá, Colombia, con la participación del Hospital Militar Central de la misma ciudad.
Sujetos
Se recopilaron datos de veinte sujetos, diez no amputados que conformaron el grupo Control y diez personas con amputación por debajo de rodilla para conformar el grupo Amputados (Tabla 1). Los sujetos del grupo Amputados presentan amputación unilateral con causa de amputación por trauma de mina antipersonal, fueron reclutados en el Servicio de Amputados del Hospital Militar Central; el lado de amputación varió entre los participantes, por ello para el proceso de análisis y presentación de resultados se estableció el lado derecho como el amputado (ipsilateral) y el izquierdo como el no amputado (contralateral), de tal manera que los datos referentes a la amputación se trasladaron al lado derecho. Todos los sujetos con amputación usaban prótesis marca Ottobock de liner y pin, con pie de carbono 21. Ningún sujeto de los examinados tenía problemas conocidos de estabilidad postural, tampoco necesitaban de ayudas técnicas externas (muletas, caminadores, etc.) para mantenerse de pie, todos presentaban autonomía en la caminata. Además, una vez explicado el objeto de la investigación, dieron el consentimiento informado de forma escrita para participar en el estudio.
Tabla 1 Grupos del estudio. Valores medios y desviación estándar.
| Grupo | Edad (años) | Talla (cm) | Peso (kg) |
|---|---|---|---|
| Amputados | 30.25 ± 2.96 | 170 ± 7.64 | 77.167 ± 8.22 |
| Control | 45.7 ± 4.72 | 160 ±8.62 | 68.5 ± 13.5 |
Los datos del CoP se recopilaron en una sesión usando las plantillas instrumentadas del sistema Pedar 22, las cuales permiten tomar datos de presión, ubicación del CoP, peso sobre cada pie, entre otras medidas, la frecuencia de muestreo usada fue 50 Hz, frecuencia capaz de registrar las variaciones de la señal medida. Cada participante se ubicó en posición anatómica de bipedestación estática sobre las plantillas usando su calzado de uso diario, con una distancia de separación de punto medio entre los pies de 9 cm y posición angular de cada pie de 7°, según se aconseja en estudios previos 8, como control de propiocepción el paciente debía fijar su vista a una pared blanca que se encentraba a 150 cm de distancia durante el tiempo de toma de datos (Figura 2). Se registraron datos de ubicación del CoP durante un periodo de 30s.

Análisis de los datos
En el software Matlab los valores de las mediciones fueron etiquetados según la variable establecida, obteniendo cuatro variables como se observa en la Tabla 2. Los datos se filtraron empleando un filtro pasa-bajo tipo Butterworth de 4° orden con frecuencia de corte de 10 Hz, ya que se ha establecido que las frecuencias del CoP están por debajo de 10 Hz 23 y luego se normalizaron con la técnica de binning de menor pérdida de información.
Tabla 2 Variables establecidas en el estudio.
| Variable | Descripción |
|---|---|
| MLI | Ubicación medial-lateral del CoP lado izquierdo |
| API | Ubicación antero-posterior del CoP lado izquierdo |
| MLD | Ubicación medial-lateral del CoP lado derecho |
| APD | Ubicación antero-posterior del CoP lado derecho |
| 1 | Grupo control |
| 2 | Grupo amputados |
A partir de los datos filtrados y normalizados se calculó el desplazamiento del CoP y la velocidad media del CoP, variables primarias del sistema. Estas medidas se normalizaron, agruparon y analizaron por separado para cada variable, determinando la cantidad de información transmitida tanto para el desplazamiento del CoP como para la velocidad del CoP, para esto se empleó el software Powerhouse™. El software estableció las agrupaciones correspondientes en el análisis de cada variable, generando un mapa de densidad para cada una de ellas, dando a conocer la distribución de los datos en un espacio bidimensional, allí la localización de los datos se representa por puntos negros, si la información de los datos se asemeja entre sí, los puntos se ubican en zonas aledañas formando regiones de color rojo que indican alta concentración, mientras que si la cantidad de información entre los datos difiere, no existe cercanía en la ubicación y forman regiones de color azul indicando baja concentración, las distintas agrupaciones se separan por una línea blanca.
Resultados y discusión
Desplazamiento del CoP
Los valores medios y la desviación estándar de las variables de desplazamiento del CoP en cada grupo se muestran en la Tabla 3.
Tabla 3 Valores medios y desviación estándar del desplazamiento del CoP en los grupos examinados
| Variable | Controles | Amputados |
|---|---|---|
| dMLI(mm) | 0.00 ± 0.21 | -0.055 ± 0.768 |
| dAPI(mm) | 0.011 ± 0.673 | -0.087 ± 9.647 |
| dMLD(mm) | 0.009 ± 0.281 | -0.017 ± 1.217 |
| dAPD(mm) | -0.008 ± 0.927 | -0.002 ± 3.086 |
d: desplazamiento. ML: medial-lateral. AP: antero-posterior. I: lado izquierdo. D: lado derecho.
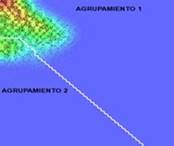
El análisis de información arrojó un valor de entropía condicional (información transmitida) de 62%, correspondiente a 0.621 bits transmitidos y un nivel de ruido (información innecesaria) de 0.38 bits. El mapa de densidad generado se observa en la Figura 3, el software identificó dos agrupaciones: el clúster 1 (AGRUPAMIENTO 1) con alta concentración de datos, el 2 (AGRUPAMIENTO 2) con concentración media.
El diagrama de espectro permite observar el cambio del valor medio de las variables entre los clústeres; con líneas se unen los valores en cada agrupación y se ordenan en forma descendente al cambio presente en las variables, la de mayor cambio se sitúa a la izquierda, en este caso el desplazamiento en dirección antero-posterior de lado izquierdo dAPI (Figura 4).
La distribución de los datos normalizados en el conjunto inicial y en las agrupaciones se da a conocer en la Figura 5, esta gráfica permite observar la variabilidad de los datos. La variable dMLI tiene baja variación de valores en las dos agrupaciones; dAPI presenta alta variación en el clúster 1, en el clúster 2 la variación es mínima; dMLD tiene un comportamiento similar a dMLI; dAPD tiene alta variación en el clúster 1 y baja en el clúster 2.
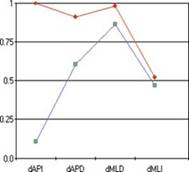
Figura 4 Diagrama de espectro de las variables del desplazamiento del CoP. La línea roja indica la agrupación 1 y la línea azul la agrupación 2. d: desplazamiento. ML: medial-lateral. AP: antero-posterior. I: lado izquierdo. D: lado derecho.

Figura 5 Distribución de los valores normalizados de los datos del desplazamiento del CoP en cada agrupación. Dataset: conjunto inicial. Clúster 1: agrupamiento 1. Clúster 2: agrupamiento 2.
La concentración y disposición de los valores de los datos en cada clúster se detalla en mapas de calor, por ello se crearon para todas las variables incluida la salida (Figura 6).
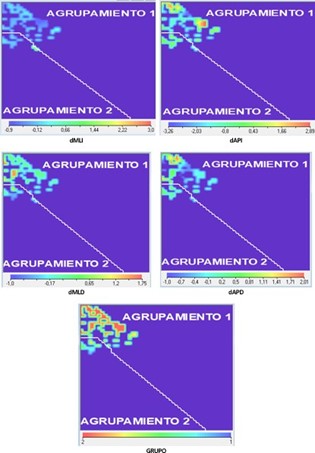
Figura 6 Mapas de calor de las variables del desplazamiento del CoP. En la parte inferior de cada mapa aparece la correspondencia entre el color y el valor.
En la parte inferior de estos mapas se muestra la relación de los colores con los valores, en donde los valores bajos se representan con color azul y los valores altos con color rojo. En dMLI los valores de los datos en los dos clústeres son similares, tienden a ser inferiores a 1 mm; dAPI tiene concentración de valores altos en el clúster 1 y medios en el 2, igual situación revela dMLD y dAPD. La variable grupo tiene dos posibles valores 1 y 2, 1 corresponde al grupo control y 2 al de amputados, en el mapa de calor de esta variable los datos de valor 2 se sitúan en el clúster 1, mientras que los de valor 1 están en el clúster 2.
Velocidad del CoP
Una vez obtenidos los clústeres y las características de estos al analizar el desplazamiento del CoP, se procedió a obtener el análisis de la velocidad del CoP siguiendo los mismos pasos que en el desplazamiento. Inicialmente, se obtuvieron los valores promedio y desviación estándar de la velocidad (Tabla 4).
Tabla 4 Valores medios y desviación estándar de la velocidad del CoP en los grupos examinados.
| Variable | Controles | Amputados |
|---|---|---|
| vMLI(mm/s) | 0.295 ± 0.529 | 0.823 ± 0.751 |
| vAPI(mm/s) | 1.022 ± 1.502 | 5.869 ± 5.647 |
| vMLD(mm/s) | 0.235 ± 0.212 | 0.73 ± 0.747 |
| vAPD(mm/s) | 1.212 ± 1.132 | 2.55 ± 2.607 |
v: velocidad. ML: medial-lateral. AP: antero-posterior. I: lado izquierdo. D: lado derecho.
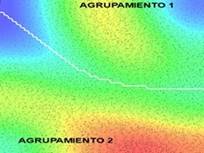
Se continuó con la valoración de la cantidad de información transmitida, obteniendo un valor de 70% (entropía conjunta) que requiere 0.693 bits para la transmisión. La cantidad de ruido presente en el sistema es de 0.3 bits. Con esta información se formó el mapa de densidad (Figura 7), donde se observan dos zonas claramente demarcadas, con una alta concentración de datos en el clúster 2 (AGRUPAMIENTO 2).
El diagrama de espectro muestra que la variable con mayor cambio entre las agrupaciones es la velocidad antero-posterior del lado izquierdo vAPI (Figura 8).
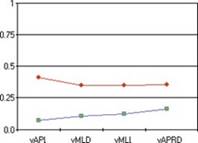
Figura 8 Diagrama de espectro de las variables de la velocidad del CoP. La línea azul indica la agrupación 1 y la línea roja la agrupación 2.
La distribución de datos de las variables en el conjunto inicial y en las dos agrupaciones muestra que en el agrupamiento 2 (Clúster 2) tiene alta variación en todas las variables; en el agrupamiento 1 (Clúster 1) la menor variación se da en la velocidad antero-posterior del lado izquierdo (Figura 9).

Figura 9 Distribución de los valores de los datos de la velocidad del CoP en cada agrupación. Dataset: conjunto inicial. Clúster 1: agrupamiento 1. Clúster 2: agrupamiento 2.
Al observar el valor de los datos en cada variable haciendo uso de los mapas de calor, se observa que los valores altos están en el clúster 2 en todas las variables de entrada. En cuanto a la variable Grupo (salida del sistema) los datos con valor de 2 están en el clúster 2 y con valor de 1 en el clúster 1 (Figura 10).

Figura 10 Mapas de calor de las variables de la velocidad del CoP. En la parte inferior de cada mapa aparece la correspondencia entre el color y el valor.
El objeto de este estudio fue evaluar el comportamiento de las medidas de desplazamiento y la velocidad del CoP en amputados transtibiales unilaterales para mantener el equilibrio durante la posición de bipedestación estática, empleando la técnica de clúster. Para ello se llevaron a cabo mediciones del CoP en dos grupos (no amputados y con amputación transtibial), se calculó el valor de desplazamiento y velocidad para cada pie y en las direcciones antero-posterior y medial-lateral, estas valores fueron normalizados empleando la técnica de menor pérdida de información, luego se realizó la medición de cantidad de información transmitida de los dos parámetros citados usando el grupo poblacional (control o amputados) como variable de salida; esta medida reveló que la velocidad contiene gran cantidad de transmisión de información (70%), superior a lo obtenido en el desplazamiento, donde la cantidad de información transmitida fue de menos del 60%. Lo anterior indica que existe una fuerte relación entre el tipo de grupo y la velocidad, además que al usar la velocidad como discriminante en un modelo de predicción se puede obtener alto desempeño y usabilidad.
Se observó que al analizar la velocidad los clústeres estaban bien separados, especificando que las distancias entre los clúster eran mayores y las distancias entre los datos de los clústeres al interior de su conjunto eran menores en comparación con los clústeres y la distribución de los datos en los conjuntos creados para el desplazamiento del CoP, lo cual se corrobora de forma gráfica con los mapas de densidad (Figura 3 y Figura 7); luego, se puede afirmar que la velocidad del CoP es mejor discriminante que el desplazamiento del CoP para observar la estabilidad en diferentes grupos, los datos tienen alta cohesión entre ellos. La anterior aseveración basada en los hallazgos de esta investigación se encuentra acorde con lo obtenido por Baig et al 7, quien en su investigación encontró que la velocidad del CoP es el parámetro más confiable para discernir condiciones de estabilidad en comparación con el desplazamiento radial promedio, el área de la elipse de confianza del 95%, la desviación estándar del CoP y la desviación estándar de desplazamiento radial.
En cuanto al aporte de cada pierna en la EPE se encontró que ambos lados, el contralateral y el ipsilateral, están involucrados en los procesos de mantenimiento de la estabilidad, cada uno aporta de forma diferente, esto ha sido reportado en varias investigaciones 3,24. La pierna protésica colabora en el soporte del peso corporal del individuo durante la bipedestación y la extremidad contralateral tiene un papel destacado en el mantenimiento de la estabilidad postural. Sin embargo, la compensación activa de la extremidad contralateral no es suficiente para mantener la estabilidad postural de forma tan eficiente como en el grupo de controles (personas no amputadas) 25,26, de allí que se tengan diferencias relevantes en los parámetros de desplazamiento y velocidad del CoP entre los grupos.
Al observar los mapas de densidad del parámetro Grupo (variable de salida) se reconocieron los dos grupos examinados tanto en el desplazamiento del CoP como en la velocidad del mismo. En el desplazamiento del CoP el clúster 1 corresponde a los amputados porque allí se sitúan los datos de valor 2, asignado a los amputados; mientras que el clúster 2 es el grupo control. Los diagramas de distribución de valores y los mapas de calor muestran que los amputados tienen valores altos en comparación con controles, hallazgo en concordancia con Molero et al 25; además que tienen alta variabilidad en el desplazamiento del CoP, siendo el contralateral en dirección antero-posterior (dAPI) el de más alta variabilidad, igual que lo mostrado por Kendell et al 2. Tanto Barnett et al 27 como Ku et al 28 establecen que el comportamiento descubierto se debe a que los amputados emplean el lado no protésico para mantener la estabilidad, ejecutando mayormente movimientos en dirección antero-posterior correspondientes a una estrategia de compensación de tobillo.
Con respecto a la velocidad del CoP el mapa de densidad muestra una marcada diferencia entre los grupos. Se detectó que el clúster 1 corresponde a los controles y el 2 a los amputados (Figura 10). Investigaciones previas dan a conocer las diferencias significativas de la velocidad del CoP entre amputados y no amputados 3,8, lo cual se corrobora en esta publicación según los resultados de la Tabla 4. Claret et al. 26 encontraron que los ajustes de la velocidad del CoP de la extremidad contralateral son rápidos y no controlados estrictamente, por ello sus velocidades y las variaciones de estas en direcciones antero-posterior y medial-lateral son mayores que las de ipsilateral, esto puede deberse a la rigidez mecánica de la prótesis, el presente estudio obtuvo igual resultado como se observa en la Tabla 4 y en la Figura 9.
Conclusiones
El uso de la técnica de clúster es útil en el análisis de la estabilidad postural estática de personas con amputación transtibial en posición de bipedestación, ya que permite detectar el comportamiento cinemático del centro de presión (CoP) de estos individuos con condiciones patológicas incidentes en el control postural lateralizado. Esta técnica detalla la ubicación de valores de las variables en los clústeres, por ello se puede emplear para caracterizar grupos poblacionales.
El resultado del análisis de clúster utilizando la cantidad de información transmitida sugiere que la velocidad del CoP es mejor medida discriminante en comparación con el desplazamiento del CoP. Los valores más altos de la información transmitida de la velocidad indican que permite la construcción de un modelo predictivo con alto desempeño, pues se ha establecido la existencia de relación entre las entradas y la salida del sistema estudiado.
En cuanto al grupo de personas con amputación se concluye que los amputados transtibiales unilaterales presentan un control postural deficiente, revelado en la estructura tanto del desplazamiento como de la velocidad del CoP durante la bipedestación estática. La pierna no amputada tiende a compensar las limitaciones mecánicas y la pérdida de somato sensibilidad de la prótesis.
La investigación estableció una línea de base objetiva para evaluar la estabilidad postural que proporciona una prótesis transtibial, aspecto fundamental en los procesos de rehabilitación de marcha protésica. En este contexto, el uso de clúster para discriminación de estabilidad postural puede convertirse en una herramienta objetiva en el momento de realizar alineación de prótesis; sin embargo, para investigar más a fondo la generalización de estos resultados, a futuro se debe indagar la estabilidad postural con diferentes tipos de prótesis. Finalmente, es importante mencionar que el procedimiento experimental utilizado involucró solo hombres, se sugiere involucrar mujeres en el grupo de estudio de las siguientes investigaciones.

