











 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. INTRODUCTION
Over recent years, Global Navigation Satellite Systems (GNSS) have seen major advances, closely related to the increase in the number of satellites and the improvement and development of signal processing algorithms. This has had a direct consequence on the widespread use of these technologies in different areas, mainly in the Engineering and primarily Civil Engineering.
In order to improve the quality metrics and services offered by GNSS systems, several GNSS networks have been installed, both private and public, offering download data services for post-process works and the sending of differential corrections, allowing for precise real time positioning. The scope of these networks can be global like the International GNSS Service (IGS), continental such as the Euref Permanent Network in Europe, national such as the ERGNSS in Spain and local such as the Andalusia Positioning Network (RAP) in Andalusia.
Each of these, Continuously Operating Reference Stations (CORS) are comprised of a certain number of GNSS receivers, distributed homogeneously throughout the area in which it is intended to provide the service, a control centre where the data from said antennae is received a data distribution channel. Using the information received from all the antennae, the control centre determines and models the errors, creating corrections that are sent by the data distribution channel in order to improve the solution obtained in Real Time Kinematic (RTK). Since the 1990s, numerous studies have been carried out in this area, seeking to improve both the calculation methods and the sending of such corrections. [1]
Today there are different methodologies for calculating the transmission of the corrections based on the unidirectional or bidirectional nature of the communication. In the unidirectional link the user receives the correction directly. Such is the case of the Flächen Korrectur Parameter (FKP) corrections [2,3] and Master Auxiliary Concept (MAC) corrections [4]. With a bidirectional link it is necessary for the mobiles receptor to send its approximate position to the control centre, generating the corrections appropriate for the mobile equipment. Such a concept is used for the following RTK architectures: Virtual Reference Station (VRS) [5] Individualized Master-Auxiliary (I-MAX) [6, 3] and Pseudo Reference Station (PRS) [7]. Today, these
methodologies are allowing for the application of GNSS technology in many areas, such as updating cartography, GIS inventories [8], fleet location and management [9], precision agriculture [10,11], mining applications [12]. Without doubt, this has meant a significant advance in the field of topography, optimising economic costs and improving farmland yields.
While it is important to improve these two factors, it is no less important to ascertain the positional quality obtained in the topographic surveys and stakeouts; fundamental aspects within the field of Civil engineering through compliance testing.
Many authors have studied the functioning and carried out different tests to verify the quality of the RTK service in a network of permanent reference stations. The tests are performed on a series of control points which are situated within the network. Some examples [13] carry out tests on the CORS Net network, which operates in New South Wales, Australia, analysing the difference between a conventional RTK solution and the focuses of the RTK network (NRTK) at different control points, in boundary conditions of distance between reference stations [14] These authors tested the precision of the position in six areas covering England and Wales using two commercial RTK network systems and comparing the coordinates obtained with the precise coordinates determined according to Bernese processing scientific GPS Software obtained through static methods. [15] Other authors perform the preliminary tests of a SmartNet research service from the point of view of the user for the purpose of assessing the quality of the NRTK service; various tests were carried out, applying static and cinematic methods using the same type of equipment as the SmartNet users in Great Britain.
[5] Other examples of RTK tests based on Active Networks have been applied previously, carrying out four simultaneous tests to evaluate RTK performance, using VRS, comparing the results for use of a simple solution and an NRTK solution (network solution) in the BLVA network in Germany.[16] They perform a systematic test that that has been carried out in different places in Shanghai to evaluate the accuracy and reliability that can be reached for VRS, RTK positioning. [17] The CORS GPS Network (GPS Net), created in Victoria (Australia) is described. The evaluation tests for NRTK technologies were performed across extensive surface areas.
Other authors have even performed tests on the periphery of Active Networks that operate in border areas between neighbouring regions [18], performing tests on RTK positioning in three Active local GNSS networks at different testing points located in the border area between the Autonomous Communities of the Region of Murcia and the Valencian Community in the south-east of Spain.
Also, between Active Networks that operate in border areas between neighbouring countries [19] they perform tests of NRTK positions and post-process, simultaneously at different points located in border areas between Portugal and Andalusia, in the south west of the Iberian Peninsula. The analysis is based on the use of two active GNSS networks present in this border region, RENEP (Portugal) and RAP (Autonomous Community of Andalusia, Spain).
The Andalusia Positioning Network (RAP) is an active local network that operates in the Autonomous Community of Andalusia (Spain). It is comprised of 22 reference stations, distributed across the area it services. The approximate separation between stations is 50 to 70 km, as can be observed in Fig. 1.
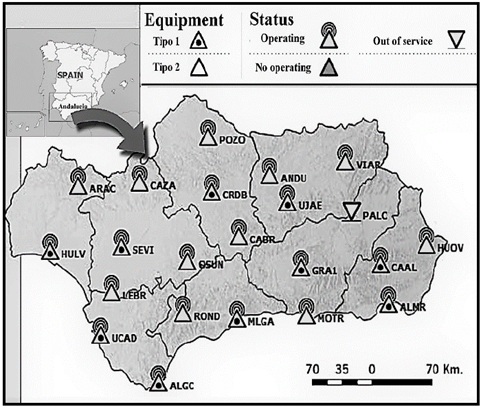
Source: authors' own and RAP.
Figure 1 Continuously Operating Reference Stations (CORS) of the Andalusia Positioning Network.
It offers precision positioning services to be used both in post-process and in real time. It creates solutions based on the Master-Auxiliary Concept (MAC) [3,4], generating different types of differential corrections, from the nearest station or form a station selected in the standard format version 2.3 Radio Technical Commission for Maritime Services (RTCM) and differential corrections based on network solution in the standard format RTCM 3.1, sent through the Internet using the NTRIP protocol (RTCM network transport via Internet Protocol) [20].
The framework of reference is the international ITRF2000; it is made up of RAP stations, linked with the nearest stations belonging to the IGS, UREF or Active Geodetic Networks of a higher order. The calculation and adjustment process is carried out with Bernese 5.0 software developed by the Astronomic Institute of the University of Berna (Switzerland). A daily coordinate is obtained for each RAP station. These solutions are combined, making a least squares adjustment to obtain a weekly solution for each station. The final adjustment of the network is made by setting the IGS or EUREF stations for each period considered. [21].
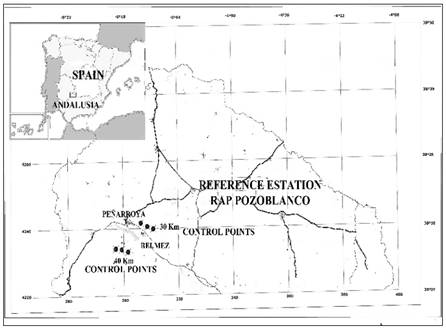
In summary, the area of study proposed is within the Andalusia Positioning Network, in southern Spain and to the north of the province of Córdoba, as can be seen in Fig. 2.
The methodology used is based on locating different control points and using the positioning services of the RAP, basically those that use differential corrections in real time and standard RTCM 2.3 format, from the nearest station to determine different parameters. First the tests to characterise the system are carried out, obtaining precision, accuracy and time to resolve the ambiguities. Subsequently the performance of the system is determined by completing topographic surveys.
2. MATERIALS
To complete this work, the Andalusia Positioning Network is used, comprised of twenty two permanent GPS stations, of which 10 belong to first phase and consist of the following elements: choke ring geodetic antenna (Dorne-Margolin) Leica AT504 with Domo, Leica GRX1200 Pro double frequency receptors with four RS232 ports and an Ethernet port with three independent IP addresses, uninterrupted electrical feed system, permanent internet connection, weather station and two radio modems: PacifiCrest and Satelline 3AS.
The second phase stations do not have weather stations or radio modems and the geodetic antenna is not the choke ring type.For quality control and data processing, there is the control centre, software, whether scientific (Bernese, Gipsy, etc.) or commercial (Leica Geoffice, Trimble Geomatic office), etc.
The mobile equipment used for data capture is a GX1230 geodetic receiver with double frequency and the possibility of internet connection through GSM link. Siemens MC75, mobile phone integrated in a Leica GFU case, 850, 900, 1800, 1900 MHz, antenna GPS ATX 1220.
3. METHODOLOGY
Static and cinematic GPS methods are applied in real time RTK; services which are offered by RAP are applied especially to those that use the positioning techniques using differential corrections in real time (RTK). The parameters to evaluate are: precision, accuracy and performance in the topographic study.
3.1. Precision
Precision allows for the dispersion of the data obtained to be determined, establishing the most probable value for a measured magnitude. The value of said magnitude shall be obtained from the observations made, which suggests an oversized number of repetitions in the measurement process. The measurements will never be exact as there is a series of factors that influence this process; the directions themselves, the instrumentation used, external factors, etc.
When using the GNSS network, this parameter will depend on the different variables, such as the number of satellites, geometry of the constellation, time of observation, precision of the ephemeris used, local effects such as multipath, corrections generated by the system, distance of reference stations, etc.
Other errors, such as ionospheric and tropospheric activity are not controllable. However, the distance between reference stations conditions the dependence of the network with respect to these factors.
Precision is determined numerically by the standard deviation of the measurements collected. To determine the precision of the system, a series of control points are installed on the hard shoulder of several roads in the north of the province of Córdoba, as can be seen in Fig. 2. These points are steel spokes which allow for the data to be taken at the same time and are manufactured so that they can remain stable during the observations. There are six such control points, distributed in groups of three, at an approximate distance of 30 to 40 kilometres respectively from the permanent reference point located in Pozoblanco, Córdoba, belonging to the Andalusia Positioning Network. The data gathering is carried out in real time RTK, configuring the mobile equipment with MAC methodology [3,4] providing differential corrections corresponding to the nearest station in the standard RTCM 2.3 format which are sent through the NTRIP protocol by internet.
To avail of sufficient data in each control point, three different series have been taken and in each series sixty repetitions were made; each data series was taken in different weeks to prevent the collected data from exhibiting a strong temporal correlation (environmental conditions, GNSS constellation configuration, etc.).
3.2. Accuracy
The accuracy of the data offered by the RAP is verified by comparing the coordinates obtained by the mobile receptor in real time RTK, configuring and using MAC architecture with the coordinates of six control points obtained with more precise methods. The coordinates of these control points have been determined through a static survey, with an observation time of approximately sixty minutes at each point. The accuracy obtained in the coordinates will depend, in this case, on the observation time at each point. Once the mobile equipment file is obtained, the corresponding file for the Pozoblanco reference antenna is downloaded from the RAP FTP for the day and time of the mobile observation.
Using Leica Geo Office commercial software, the control point coordinates are calculated in post-process. In general, the parameters used in the post-process are: angle of elevation 15º, type of ephemeris transmitted, type of automatic solution and type of automatic GNSS.
The strategy used is: automatic frequency, set ambiguities up to 80 km, minimum duration for floating solution 300 seconds, sample interval: use all the observations made, Hopfiel tropospheric model, automatic ionospheric model, minimum distance 8 km and automatic ionospheric activity.
To check the deviation of the coordinates obtained by the receiver three series of measurements are taken at different times, taking 60 data in each series. The solution used is that generated by the RAP applying the MAC concept, differential corrections from the nearest station, transmitted in RTCM 2.3 MESSAGES format, through NTRIP [3,4]. The coordinates obtained in real time RTK compared to the coordinates of the control points obtained with the upper range static precision method will allow for the standard deviation to be obtained and thus to establish the accuracy or veracity of the system.
3.3. Ambiguity resolution time
The time a piece of equipment needs to resolve ambiguities depends on a number of factors that can be difficult to determine a priori, such as: distance from the base station, number of satellites observed, algorithm used by the manufacturer, possible loss of cycle during the calculation process, etc.
On this point it is intended to evaluate how much time a field operator needs to take the sample of a determined point. Firstly, the time the receiver takes to achieve a precise positioning is measured and secondly the time taken by the system to recover and the precision after a data loss and the resulting loss of phase.
The first point can be measured easily; it is only necessary to initiate the equipment and measure the time needed to obtain the desired precision. The latter will depend on whether there is an outage in the system, a data loss and loss of phase solution and from this moment measure the time taken to achieve the necessary precision.
In each series, the time a piece of equipment needs to start up has been measured, as has the time taken to connect to the control centre and to obtain the precise position. The recovery time can only be measured if there is a data crash and this is when the recovery time is noted.
3.4. Surveys carried out
The system is analysed from the perspective of a topographic survey, comparing the performance obtained with the classic surveys. For this, several small extension surveys have been carried out, used for different Engineering and Mining projects: surveys of properties, roads, motorways, etc.
Approximately two thousand points have been taken with mean quality of 0.0494m. The method used is in real time (RTK), using the differential correction solution (MAC) from the nearest station, RTCM 2.3 format.
4. DATA ANALYSIS
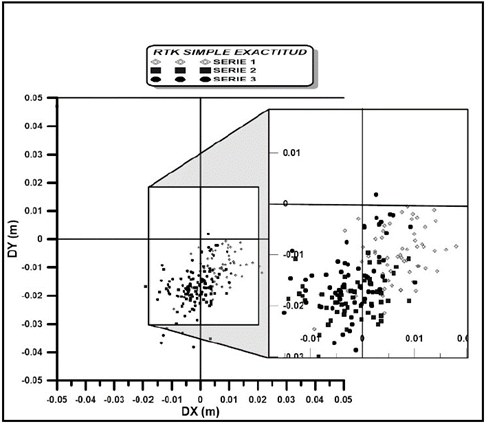
4.1. Precision
The coordinates taken as reference to determine precision are obtained from the filed measurements themselves, determining the most probable value as the average of the measures taken.
Three series of measures are taken at each control point, where 60 repetitions are made. Different statistical tests are applied and the errors are represented to see if they follow a normal distribution.
Table 1 shows the discrepancies in the East, North and Vertical components with respect to the most probable value assigned to each control point.
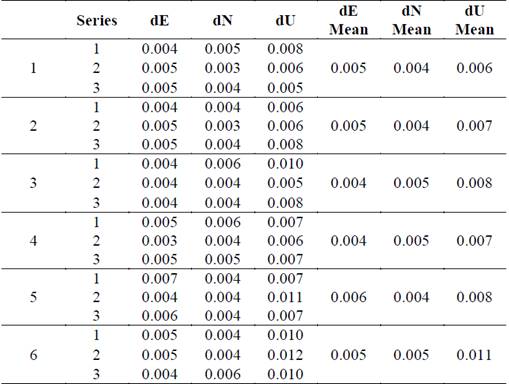
Table 2 shows the standard deviations σE, σN, σU of the East, North and Vertical components for the three series obtained at each control point, and the average value obtained at the points located 30 and 40 km from the reference station. The results obtained are similar, although the control points are at different distances from the reference station.
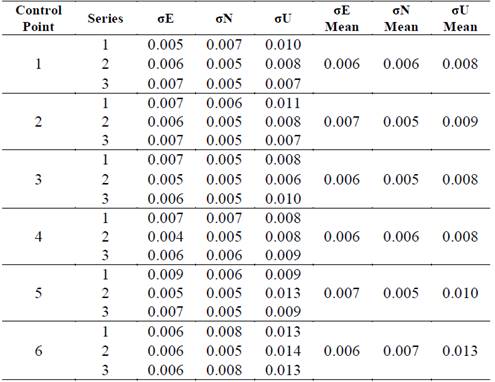
For all the points located 30 to 40 kilometres from the reference station, the mean precision values for the component East, North and Vertical can be observed in Table 2. The variation in precision for the East component ranges between (0.006 - 0.007) m, for the North component, the ranges between (0,005 - 0,007) m and for the vertical component between (0,008 - 0.013) m,
4.2. Accuracy
Accuracy is determined by comparing the coordinates obtained in real time by the mobile equipment with the control points located approximately 30 to 40 km from the nearest reference station, Pozoblanco, of the Andalusia Positioning Network and at the same time shall depend on the coordinates assigned for these control points. The method used to obtain the coordinates of the control points is to perform an autonomous or static positioning and subsequently a post-process with commercial Leica Geo office software.
Source: Authors' own.
Figure 3 Horizontal discrepancy with respect to the post-process solution and RTK solutions of the RAP for control points 4.
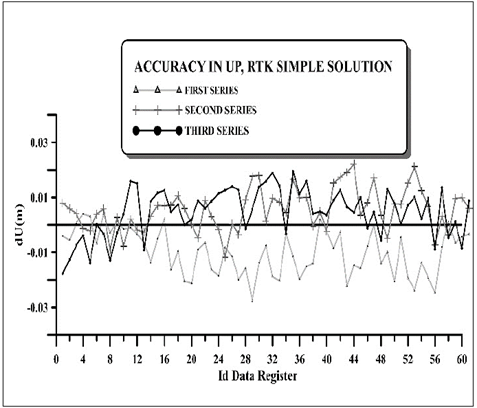
Source: Authors' own.
Figure 4 Vertical discrepancy with respect to the post-process solution and RTK solutions of the RAP for control points 4.
Table 3 shows the control points, the horizontal and vertical components, the accuracy of each component in the three series of measurements taken and the average value for each component.
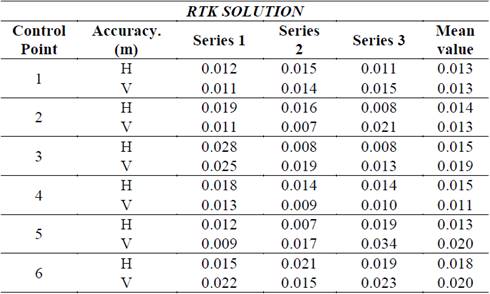
The variation in accuracy ranges between (0.013 - 0.018) m and (0.011 - 0.020) for the horizontal and vertical components respectively.
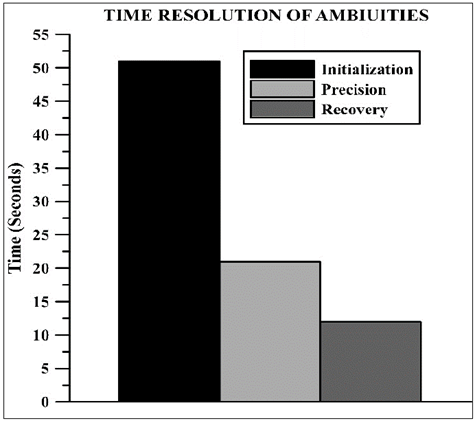
4.3. Ambiguity resolution time
As observed in Fig. 5, the equipment used for performing this work needs an average of 51” to initialise and receive the signal from the constellation, 21” to connect with the control centre of the network and to have precision to complete observations and some 12” to recover precision when it loses a fixed solution.
4.4. Survey performance
At this point, the performance of the system is analysed when the topographic survey is carried out. Once the range of the precision and accuracy values is known, the survey is analysed as a whole: time for sampling a point, quality and outages in the system, errors with coordinates of the points sampled.
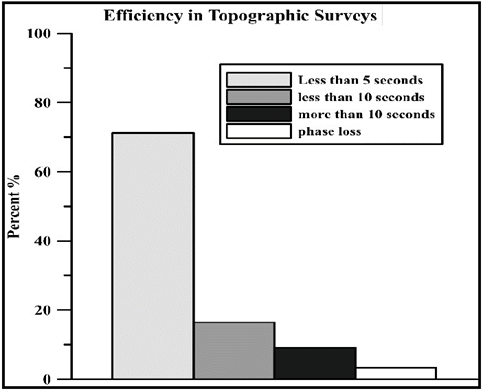
Analysing the data for observation times and coordinates of all the surveys carried out, the percentage of points that take a determined time and the average quality of the sampling of all the points can be obtained.
In Fig. 6 the percentage of points that take less than five seconds, less than ten seconds and more than ten seconds can be observed, along with that corresponding to the loss of data with the consequent loss of phase and solution.
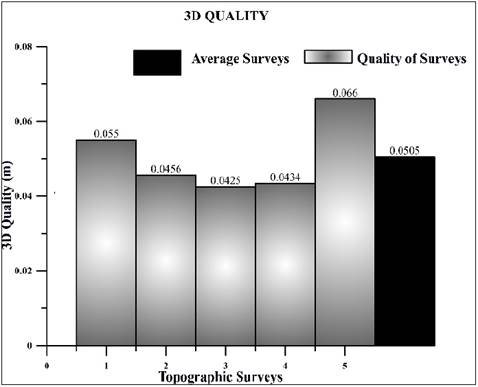
In Fig. 7, the different surveys are shown on the abscissa axis and the ordinate axis shows the quality in position and height at which the points of all topographic surveys were sampled.
5. CONCLUSIONS.
In this work, the services offered by RAP (Andalusia Positioning Network), an Active Local Network located in the Autonomous Community of Andalusia in southern of Spain have been evaluated.
It has been possible to show that the precision and ambiguity resolution times obtained using the permanent GNSS network are similar to those obtained using conventional RTK. The average precision values obtained for the different control points of the East, North and Vertical components are (0.006 - 0,006 - 0,009) m. respectively, Position (3D) 0.012m
If we compare the static method used to obtain the coordinates assigned to the control points, with sampling in (RTK), the accuracy reached in determining said coordinates is high, even though it would probably have been necessary to take a larger number of measurements. The average accuracy values for the six control points, in the horizontal and vertical components are: (0.015 - 0.016) m, respectively. Position (3D) 0.022 m.
The system shows good stability and provides homogeneous solutions, even though the data has been taken at different times and obtained from different reference stations.
In terms of the topographic survey, it is verified that use of an Active Geodetic Network of permanent stations operating continuously is adequate for use in topographic and engineering projects. It offers excellent performance in data sampling, in the acquisition time of same, in the quality of the system and in the processing of data.

