











 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción
El diagnóstico de fallas de motores es relevante para los sistemas basados en motores eléctricos (Electric Motor Driven System - EMDS, puesto que previenen salidas de operación, reducción de la vida útil de los equipo, pérdidas económicas y gastos de mantenimiento [1-3]. De esta forma, se han desarrollado diversidad de métodos y herramientas que permiten hacer seguimiento a variables asociadas al motor; las cuales presentan un determinado comportamiento en condición de falla. Por ejemplo: el par, la corrientes, el ruido acústico, las vibraciones, la temperatura, entre otros.
Recientemente los sistemas de monitoreo y diagnóstico emplean redes inalámbricas de sensores - WSN y dispositivos System On Chip (SoC) con el fin de obtener datos en tiempo real y mejorar el tiempo de respuesta en comparación con los sistemas tradicionales de diagnóstico basados en datos históricos y pruebas en campo (análisis por impulsos de alta tensión); además, las WSN reducen las restricciones de instalación, permiten la relocalización de dispositivos y permiten múltiples configuraciones de topología de red [3].
La técnica más recurrente en sistemas de diagnóstico es el monitoreo y análisis espectral de corrientes de estator - MCSA, puesto que es un proceso no invasivo, emplea sensores de fácil adquisición y la instalación no requiere cambios en la instalación [4]. La principal dificultad es la fuga de información espectral asociado a la resolución y la tasa de muestreo [5], y el avance en la complejidad del análisis conforme se busca una mayor precisión y tolerancia a errores. Dentro de las alternativas, se plantean mejoras en el análisis como la integración de técnicas de inteligencia artificial (IA) para la clasificación y toma de decisiones; y métodos de análisis espectral invariantes en el tiempo, tales como Discrete Wavelet Transform (DWT), Hilbert-Huang Transform o la Discrete Harmonic Wavelet Transform (DHWT) [6].
Las técnicas de análisis en MCSA pueden ser clasificadas en tres grupos: análisis en el dominio del tiempo dependientes del punto de operación del motor y sin la capacidad de discriminar entre fallas estáticas, fallas dinámicas o transitorios del motor/carga [7]. Otro grupo, son las técnicas en el dominio de la frecuencia, en donde FFT (Fast Fourier Transform) es la técnica base de análisis debido a su eficiencia computacional restringida a condiciones estacionarias, sistema balanceados y dependencia del deslizamiento [5]. Diversas alternativas son propuestas para mejorar la sensibilidad al ruido, mejorar la resolución y/o operar con bajo muestreo, tales como combinar con técnicas de subespacios [5,8] o transformada Park [9-10].
El tercer grupo de técnicas de análisis contemplan las condiciones no estacionarias típicas de motores con usos industriales, corresponden a técnicas de análisis en el dominio del tiempo-frecuencia que reducen la sensibilidad al punto de operación. Dentro de estas se encuentran técnicas basadas en distribuciones de probabilidad WVD (Wigner Ville Distribution), Zhao Atlas Marks Distribution; las técnicas mejoradas para reducir su auto interferencia PWVD (Pseudo WVD), smoothed PWVD y CWD (Choi Williams Distribution). Una parte importante de estas técnicas son las que analizan bandas de frecuencias: STFT (Short Time Fourier Transform), HHT (Hilber-Huang Transform), CWT (Continuous Wavelet Transform) y DWT (Discrete Wavelet Transform) [5,11].
En este trabajo se realizó la implementación de un sistema de monitoreo y diagnóstico de fallas entre espiras de motores de inducción basado en MCSA sobre una WSN [11], el cual permite la recolección de datos y la aplicación de diversas técnicas de diagnóstico. Inicialmente se plantea un diagnóstico basado en valores AC, posteriormente basado en indicadores de falla resultantes de aplicar FFT y finalmente se aplica DWT para contemplar posibles mejoras que se puedan plantear.
Debido a la complejidad de las técnicas de inteligencia artificial su implementación en dispositivos programables se ha encontrado restringido a SVM [12], análisis de determinantes y probabilidades y redes neuronales artificiales básicas ANN (Artificial Neural Networks) [13-16], puesto que la mayoría de análisis requieren una cantidad de información base. En esta coso se plantó aplicas SVM debido a la facilidad de poder plantear la ecuación de evaluación de decisión y lograr un entrenamiento externo.
2. Monitoreo y diagnóstico de fallas
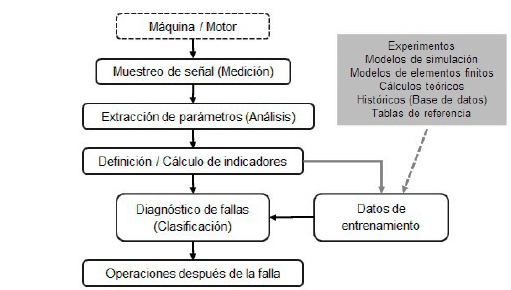
El proceso de diagnóstico de fallas puede ser descrito como se presenta en la Fig. 1, en donde se realiza la medición de variables físicas del motor (ver Ec.(1)). Posteriormente, se extraen parámetros X de las señales medidas y se definen indicadores Y, tal como se define en la Ec. (2-3). Estos últimos son empleados para generar un diagnóstico de fallas del motor de inducción, el cual consiste en la estimación de estado a partir de la clasificación de los datos en estados discretos: sin falla y con falla, falla en alguna de las fases, un tipo de falla específico, entre otros.



Se define el diagnóstico de fallas como funciones o algoritmos φ que parten de diversos indicadores para la identificación de patrones de comportamiento y realizar la clasificación de falla, asignando un estado discreto. Es decir:

En donde:

La definición de φ varía según cada una de las técnicas de diagnóstico, en donde puede ser aplicado una clasificación basada en thresholds cuando se tiene una clara diferenciación del comportamiento de los indicadores en condición de falla [17-19], o técnicas de análisis con algoritmos IA y Machine Learning (ML) buscando mejorar la observabilidad de la falla, tolerancia ruido y mejorar la precisión y exactitud [20].
El uso de IA o ML requiere de un entrenamiento con un conjunto de datos (indicadores) de cada estado definido, con los cuales se realiza comparación de las mediciones futuras. En el caso de diagnóstico basado en históricos, los indicadores son pasados a los datos de entrenamiento constantemente para ser luego tomados como referencia para el diagnóstico.
El proceso propuesto realiza una clara separación entre el análisis y la clasificación de las fallas puesto que las diferentes técnicas de análisis desarrolladas para detectar fallas en los motores (FFT, HHT, DWT) finalmente entregan un valor o parámetro al cual realizar seguimiento, pero solo al aplicar una herramienta de clasificación de datos o de toma de decisiones (SVM, distribuciones de probabilidad, etc.) se logra tener un diagnóstico de la máquina. Incluso para herramientas basada únicamente en AI emplean algún parámetro de o indicador de los datos brutos registrados [20].
3. Arquitectura del sistema de diagnóstico
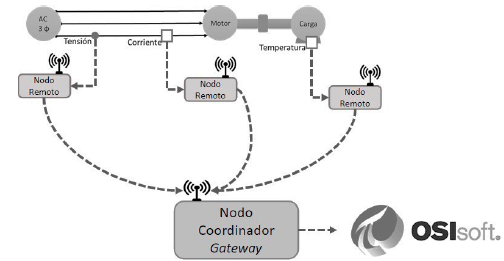
El sistema propuesto implementó una red inalámbrica de sensores (Wireless Sensor Network - WSN) basada en protocolo ZigBee empleando módulos de comunicación XBee y su respectiva API (Application Programming Interface) de comunicación serial y gestión (según https://python-xbee.readthedocs.io/en/latest/). En la Fig. 2 se presenta la estructura general del sistema de diagnóstico en donde el nodo concentrador es responsable de la gestión de los datos y alarmas localmente y hacia la base de datos implementada sobre PI System a través de la interfaz PI Web API (ver [11]). La interfaz al usuario para visualización de estado y variables se implementó en servicios web de PI Vision y PI ProcessBook.
El nodo remoto fue implementado sobre un MCU LPC54114J256 con procesador ARM Cortex M4 y coprocesador ARM Cortex M0+, brindado las funciones presentadas en la arquitectura de la Fig. 3. El acondicionamiento de señal incluye un filtro capacitivo conmutado MAX291 o MAX295 para ajustar el filtro antialiasing y lograr frecuencias de muestreo hasta 25 kHz por fase acorde con el tipo de señales de entrada o las técnicas de análisis requeridas.
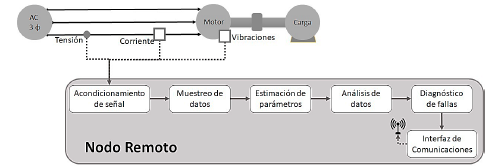
Los análisis realizados de manera descentralizada tomaron como base las librerías CMSIS y los diversos drivers de LPCXpresso de NXP, a los cuales se desarrollaron e integraron herramientas propias requeridas por el análisis propuesto. Por ejemplo, paquete submuestreo, DWT, SVM o curtosis [11]. La primera etapa del análisis corresponde a la extracción de parámetros (ver Ec.(2)), posteriormente se realiza el cálculo de indicadores de falla (ver Ec. (3)) para finalmente ensamblar vectores de datos y aplicar una técnica de decisión o clasificación de datos para así diagnosticar o identificar un estado; ver Ec.(4).

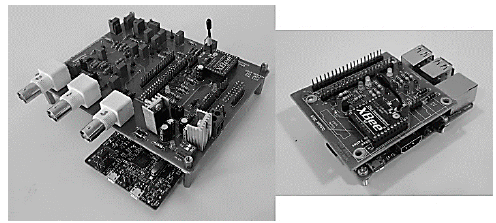
El nodo coordinador (ver Fig. 4), se desarrolló en Python y se implementó en un Single Board Computer (SBC) basado en Debian, Raspberry Pi. Este módulo tiene capacidad de recolectar datos de diferentes variables y realizar fusión de datos [3,22,23], permitiendo combinar y aplicar un diagnóstico avanzado que propone mejorar el despeño del diagnóstico basado en diferentes resultados parciales como por ejemplo el uso de indicadores de falla en las corrientes e indicadores tomados de las vibraciones [24]. Los prototipos desarrollados se muestran en al Fig. 5.
4. Metodología
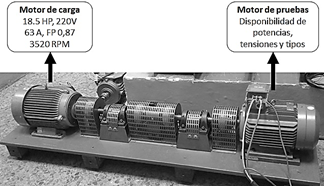
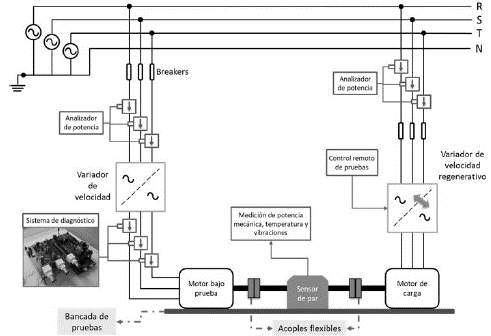
Se empleó un bancada de pruebas de motores (ver Fig. 6) con el fin de controlar el punto de operación (velocidad y par) durante las diferentes pruebas de condición de falla. Se emplea un variador de velocidad ABB ACS800-1 para el control de la velocidad del motor bajo pruebas y un variador regenerativo ABB ACS800-11 para el control del par en modo regenerativo. Ver Fig. 7. Se empleó un motor de inducción trifásico tipo jaula de ardilla Siemens 7.5 HP (5.6 kW) a 220 V conexión en YY, 1732 rpm y FP 0.73; el cual fue acondicionado para generar de manera controlada fallas entre espiras e instaladas termocuplas internas para seguimiento de la temperatura del devanado [25]. En la fase W se extraen nuevas terminales de conexión desde la espira 17, 19, 21 y 23 de tal forma que respecto a la espira 23 pueden conectarse interruptores para generar cortos de 2 (C1) , 4 (C2) y 6 (C3) espiras respectivamente. Por lo tanto, es posible generar tres magnitudes de fallas diferentes en el mismo motor.
El procedimiento realizado en el laboratorio consistió inicialmente en la recolección de indicadores previamente configurados en el nodo remoto (ver [11,21]) en diferentes condiciones de prueba conocidas de velocidad, par, sin falla y con falla de 2 espiras (C1) o de 4 espiras (C2). Cada punto de prueba tiene al menos 12 datos en condición de falla.
Basados en esta información se realiza el entrenamiento de la SVM (offline sobre Python, https://scikit-learn.org/stable/modules/svm.html) y se obtienen los vectores de soporte que mejor se ajusten en la clasificación de los datos. Posteriormente, los vectores de soporte son configurados en el nodo remoto para que cada vez que realice una medición de las variables pueda realizar la estimación de si hay una condición de falla. Finalmente, se configuran las mismas condiciones de prueba aplicadas en la recolección inicial de datos y se aplica una falla a fin de evaluar la correcta detección de falla. Estos resultados son igual recolectados por el servidor y de manera local en el nodo coordinador a modo de logs [11]. La validación se realiza en las mismas condiciones de falla configuradas con al menos 12 ciclos de análisis en intervalos de 5 segundos.
Basados en el procedimiento descrito, se realizó la validación de la recolección de datos y del diagnóstico descentralizado basado en una SVM tomando como indicador de falla la corriente RMS de cada fase (valor AC). Posteriormente se implementó FFT como análisis de referencia de la señal recolectada, en donde diversos armónicos son tomados como indicadores. Posteriormente se integra DWT para extraer diversos indicadores de cada aproximación o detalle obtenidos en cada nivel de abstracción.
4.1 FFT
La transformada de Fourier de las señales de entrada se obtiene a partir de la librería FFT de CMSIS (https://www.keil.com/pack/doc/CMSIS/DSP/html/index.htmlSe) para LPCXpresso (https://www.nxp.com/docs/en/user-guide/MCUXSDKPACKSGSUG.pdf), la cual puede ser ajusta a diversos tamaños de vectores de datos y acorde con la arquitectura del procesador empleado. Según la prueba requerida se ajustaron frecuencias de muestreo de 10240 Hz, 2048Hz y 1024 Hz con su respectiva cantidad de muestras para lograr Δf de 10 Hz, 1 Hz y 0.1 Hz.
Se extraen indicadores basados en la amplitud de armónicos específicos y de la frecuencia fundamental acorde con la velocidad del rotor. Dado que se conoce el tipo de falla y su patrón de respuesta característico en frecuencia [25,26], ver Ec. (6); se definió un indicador correspondiente a la amplitud máxima de un rango de frecuencias con límite superior definido por f sth cuando se opera sin carga (s=0) y límite inferior cuando se encuentra a plena carga (s=0.038).

4.2 DWT
La Transformada Discreta Wavelet (DWT) permite realizar simultáneamente un análisis tiempo-frecuencia, siendo una de las técnicas de uso común en análisis multiresolución MRA (Multi Resolution Analysis). El objetivo de MRA es obtener una proyección de la señal en un espacio vectorial basado en una función de análisis escalable en cada una de las dimensiones asignadas, para así extraer aproximaciones de la señal inicial. En el caso de la DWT, se realiza una proyección a dos espacios vectoriales ortonormales basados en funciones escalables en amplitud y frecuencia, función Wavelet madre, lo que permite tener aproximaciones de la señal en función del tiempo con respuestas características en frecuencia acordes al espacio vectorial al cual se realizó la proyección. Finalmente mediante el Teorema de Mallat se definen los coeficientes de aproximación aj+1 [p] y los coeficientes de detalle dj+1 [p] de la proyección j+1 [27], ver Ec. (7) y (8).


Siendo
 los filtros discretos espejos conjugados de descomposición que garantizan la proyección basados en una función Wavelet madre. De manera simplificada las proyecciones son presentadas como la convolución de la señal considerando un factor de escala en el tiempo, ver Ec. (9) y (10), lo que puede ser visto como un submuestreo (↓ 2)
los filtros discretos espejos conjugados de descomposición que garantizan la proyección basados en una función Wavelet madre. De manera simplificada las proyecciones son presentadas como la convolución de la señal considerando un factor de escala en el tiempo, ver Ec. (9) y (10), lo que puede ser visto como un submuestreo (↓ 2)

En la Fig. 8 se presenta la secuencia para el análisis de Wavelet secuencial con un filtrado seguido del submuestreo en factor de 2. En el caso de la reconstrucción de la señal la señal filtrada debe ser sobre muestreada (↑2).en un factor de 2 completando con ceros y luego aplicar los filtros inversos de reconstrucción, para finalmente realizar la suma.
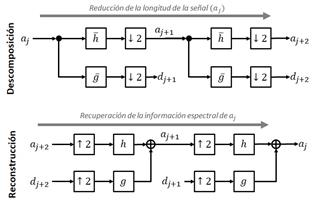
Figura 8 Descomposición y reconstrucción de la señal con Wavelet hasta y desde el nivel 2 (a j+2 y d (j+2) ).
Las respuestas impulsos deben ser acordes con la Ec. (11) y (12). Esta estructura de análisis de la transformada Wavelet permite su fácil implementación en sistemas de baja capacidad de análisis, así como su programación con algoritmos secuenciales de baja complejidad [19,28], incluso se pueden aplicar procesos que optimizan los análisis como por ejemplo el algoritmo Lifting [29].


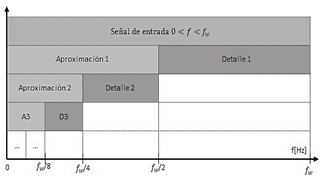
Debido al submuestreo realizado en cada una de las nuevas iteraciones el ancho de banda contemplado se reduce en cada una de las iteraciones, tal como se presenta en la Fig. 9. Por ejemplo, en la primera aproximación (A1), al ser un filtro pasa bajos, se analiza la primera mitad del ancho de banda de la señal. Luego en la segunda aproximación (A2) se toma la mitad del nuevo ancho de banda, es decir la cuarta parte inicial. En el caso del segundo detalle aplicado (D2) contempla únicamente la mitad del ancho de banda superior de A1. Este análisis da las bases para la construcción del kurtograma de un MRA típico [30].
Se realizó la implementación de DWT acorce con la Fig. 9, calculando indicadores como la energía o Curtosis (kurtograma [31,32]), de cada uno de las aproximaciones y detalles de la DWT, basados en funciones CMSIS. Se aplica inicialmente DWT de nivel 8, con wavelet madre tipo Daebuchies db44, pero es configurable según se necesite si se redefinen las respuesta impulso, Ec. (11) y (12).
4.3 SVM
Una máquina de vector de soporte Suport Vector Machine (SVM) es un algoritmo de aprendizaje supervisado, empleado en la clasificación binaria de datos basado en la proyección a un hiperplano de los datos, transformación ℝn → ℝn, en el cual se define una superficie (ℝn o típicamente ℝ3)o función (ℝn) que delimita las áreas de decisión. La transformación vectorial se define como Kernel y la definición de la superficie de decisión requiere de una etapa de optimización, entrenamiento del algoritmo, para identificar un conjunto de datos óptimos (vectores de soporte) que permitan construir el plano con la menor cantidad de puntos y maximizando la separación de conjuntos de datos con estados conocidos.
En la Ec. (13) se presenta la función de decisión implementada de la SVM para dos estados de clasificación, en donde y i α i son simplificados a un único coeficiente dual coeficients y ρ es la constante de intersección, ambos obtenidos del entrenamiento; y Κ(x i ,x 0 ) es la función Kernel que opera sobre los n vectores de soporte x i y el vector datos a clasificar x 0 .

El diagnóstico propuesto corresponde a una SVM la cual cuenta con librerías de análisis disponibles en Python [33,34] (acceso web y GitHub, https://scikit-learn.org/stable/modules/svm.html) las cuales son empleadas para realizar el entrenamiento de manera offline de diversos conjuntos de datos recolectados por el nodo remoto. Para realizar la clasificación de un nuevo dato recolectado de manera distribuida por el MCU, se implementó la función de decisión y del Kernel en C++ ajustable a 4 tipos de Kernel (lineal, RBF, Sigmoid y polinomial), ver Tabla 1, además de ajustarse a diversos tamaños de vectores de soporte.
Posteriormente a cada uno de los análisis y diagnósticos realizados se dejó configurable la opción de realizar el reporte de solamente el resultado de la clasificación de la falla (alarma), incluir los indicadores con los que se realizó el diagnóstico (entrada de la SVM y resultados), incluir todos los indicadores adquiridos (valores de la DWT y FFT) o incluir hasta los datos de medición inicial (valor AC, RMS y DC). Esto con el fin de realizar una mejor gestión del consumo de energía luego de que se tenga ajustado la identificación y clasificación de la falla.
5. Resultados y análisis
De acuerdo con la Ec. (6), las frecuencia de falla se encuentra entre 868 Hz y 900 Hz para carga completa (s=0.038) y vacío (s=0) respectivamente. Con m=2, Z=28 y p=4. Por lo tanto, para un fs=10240 Hz, fw=5120, el detalle 3 “D3” de DWT (640 Hz a 1280 Hz) tendrá un comportamiento diferente conforme al aumento de la falla entre espiras. Así como el armónico 15° y 14° cuyas frecuencias son las más cercanas a la de falla. Por otro lado, debido al efecto de desbalance de corriente en condición de falla, el armónico fundamental presentará algún cambio asociado a la condición de falla y en el caso de DWT, el detalle 7 “D7”.
De esta forma, se definen los indicadores en cada uno de los casos anteriores que permiten reflejar un comportamiento diferenciado en condición de falla y sobre los cuales aplicar la ecuación de la SVM, una vez se realiza el entrenamiento.
5.1 Clasificación basada en desbalance: valores AC
Se empleó el valor AC normalizado de la corriente de cada fase de entrada como indicadores de falla, y mediante un kernel polinomial se realizó el entrenamiento de la SVM.
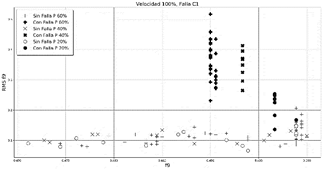
En la Fig. 10 se presenta el comportamiento diferenciado de emplear estos indicadores en condición de falla C1. El objetivo de la normalización propuesta en los indicadores es lograr valores posibles menores a 1 y un valor central de diferenciación cercano a 0.5.
Fuente: Elaboración propia.
Figura 10 Comparación XY de los valores AC de la fase A y B, falla C1, velocidad 100% y carga 60%.
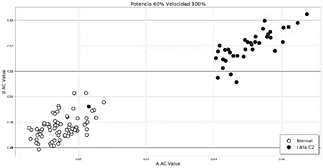
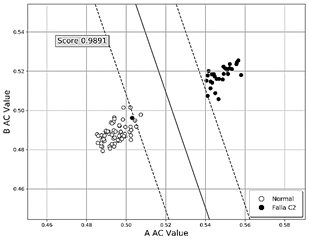
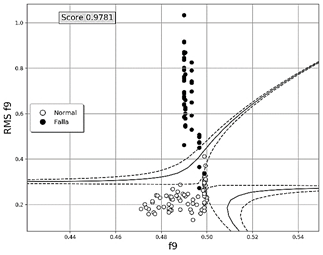
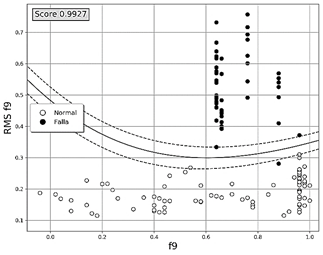
En la Fig. 11 Figura se presenta el mapeo normalizado de los valores AC de la fase A y B cuando se presenta falla C1 en donde claramente se puede diferenciar un comportamiento asociado a la falla entre espiras. Se logra una exactitud de 98.9% además de tener una franja de seguridad bastante amplia demarcada por las líneas punteadas. Al evaluar un segundo vector de datos (ver Fig. 12) se obtiene una clasificación con efectividad del 100%, además de agrupar mejor los datos de prueba.
Fuente: Elaboración propia.
Figura 11 Clasificación normalizada basada en valores AC de la fase A y B, falla C1, velocidad 100% y carga 60% - Entrenamiento.
Fuente: Elaboración propia.
Figura 12 Clasificación normalizada basada en valores AC de la fase A y B, falla C1, velocidad 100% y carga 60% - Verificación.
Se realizó validación en laboratorio obteniendo una identificación de falla correcta en cada una de las condiciones de prueba, pero se debe considerar que la presencia de un desbalance en las corrientes no se asocia únicamente a una falla entre espiras, por ejemplo, alteraciones en el control o desbalance de carga. En consecuencia, el indicador sugerido es un correcto indicador de falla acertado, pero no es suficiente para lograr decidir si es una falla entre espiras o es estado temporal de la operación [20].
5.2 Clasificación basada en FFT
Se configuró el muestreo de tal forma que la FFT alcanza un Δf de 1 Hz y se definió como indicadores la frecuencia principal del sistema fs, acorde con el punto de operación, y la frecuencia de mayor amplitud en un rango definido por f sth MAX cuando el motor está en vació (s=0) y por f sthMIN en carga nominal (s=0.038). Estos límites son ajustados acordes a según la Ec. (6) y permiten realizar el rastreo de las frecuencias de falla [25].
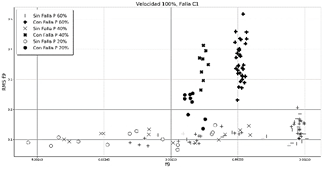
El seguimiento de frecuencias es propuesto debido a su diferenciación en condición de falla en comparación con el análisis tradicional de armónicos; en donde, el 3° armónico presentó un aumento del 31.7% y el 9° armónico del 12.4%, producto del aumento de componentes de secuencia cero producido por el desbalance de corrientes. Por otro lado, el 11° armónico presentó un aumento del 10.5% con posibilidad de emplearlo como indicador en la clasificación, mientras el seguimiento integrado alcanzó un crecimiento del 194.7% en condición de falla del indicador.
En la Fig. 13 se presenta el comportamiento del indicador planteado de seguimiento de frecuencia para diversos valores de carga con falla C1, en donde se observa que a menor carga el componente principal de frecuencia se desplaza hacia el límite superior (900 Hz) y su magnitud es menor. Entonces, la diferenciación con baja carga de fallas pequeñas es complicada y puede generar una gran cantidad de errores al confundirse con otras señales o quedar opacada por otros armónicos presentes en la red eléctrica. Por ello, se implementó realizar una normalización de la frecuencia proporcional al componente principal de frecuencia. El resultado se presenta en la Fig. 14 en donde se da una mejor separación del conjunto de datos en falla C1 al 20% de la potencia del conjunto de datos sin falla (cualquier potencia). En caso de presentar fallas más críticas las magnitudes aumentan proporcionalmente, lo que gráficamente se vería como un corrimiento hacia arriba de todos los valores con falla.
Fuente: Elaboración propia.
Figura 13 Comparación XY de la amplitud y la frecuencia del componente principal entre fsthMIN y f sthMAX para C1, velocidad 100% y carga al 60%, 40% y 20%.
Fuente: Elaboración propia.
Figura 14 Comparación XY de la amplitud y la frecuencia normalizada del componente principal entre f sthMIN y fsthMAX para C1, velocidad 100% y carga 60%, 40% y 20%.
En la Fig. 15 se presenta la curva resultante del entrenamiento basado en 137 datos sin falla y con falla a diferente carga. El kernel que mejor da un comportamiento en la clasificación fue del tipo polinomial grado 4 con 11 vectores de soporte. Durante las pruebas en campo basados en la ejecución en el nodo remoto del diagnóstico basado en el seguimiento de una banda de frecuencia se logró detectar fallas superiores al 40% de la carga con una precisión del 100%, en cambio para potencias del 20% se presentó un error por falso negativo del 40% correspondiente a fallas que estando presentes no fueron detectadas.
Fuente: Elaboración propia.
Figura 15 Clasificación basada en seguimiento de frecuencias para falla C1 velocidad 100% y carga variable, frecuencia normalizada.
Con el fin de reducir el error de falso negativo, no detección de falla al 20% de carga, se incluyó el uso de los valores de normalizados de la amplitud respecto al armónico fundamental (condiciones en [35]). La curva resultante con exactitud en la clasificación del 99.3% del entrenamiento se presenta en la Fig. 16. Durante la verificación en laboratorio, se elimina el error previo de falso negativo, pero se aumentó la cantidad de falsos positivos (casos sin falla presentados determinados como en falla), 14.9% en 308 análisis. Por lo tanto, se ajustó el offset de la SVM en el nodo remoto un 10% de tal forma que se redujeron los falsos positivos a un 2%.
Fuente: Elaboración propia.
Figura 16 Clasificación basada en seguimiento de frecuencias para falla C1 velocidad 100% y carga variable, frecuencia y amplitud normalizadas.
Se encontró que el ajuste del offset propuesto correspondió al desgaste del aislamiento derivado de las diferentes pruebas en condición de falla, es decir la presencia de una falla incipiente permanente, ya que de manera constante la condición sin falla es relativamente mayor generando una gran cantidad de errores tipo falso positivo y dificultando el análisis deseado de entrenamiento de la SVM. Adicionalmente, se encontró que ante las variaciones repentinas de carga o de velocidad, se presentaban falsos positivos, producto de interferencias que emulan el comportamiento de una falla. Entonces se requiere contemplar herramientas que incluyan Fourier como una herramienta adicional de identificación, pero no como exclusiva para la identificación de falla.
5.3 Clasificación basada en DWT: energía
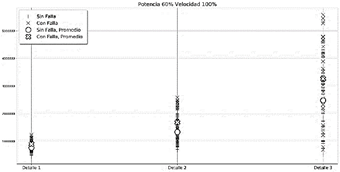
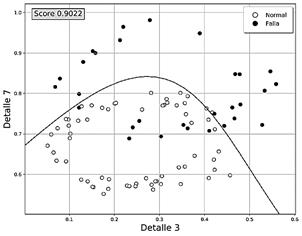
En condición de falla, la energía del detalle 6° de la fase en falla tuvo un crecimiento en promedio de 23.9% y la del detalle 7° de 19.6%, debido a que la frecuencia principal son 60 Hz y el desbalance de corriente logra influenciar la señal de energía de estos dos detalles. En el caso del detalle 3, el aumento fue de 31.6%, permitiendo tomar este detalle como indicador de falla específicamente de falla entre espiras; tal como se presenta en la Fig. 17. En la Fig. 18 se presenta el resultado de la SVM con valores normalizados para garantizar valores ≤ 1 logrando una exactitud de 90.22%.
Fuente: Elaboración propia.
Figura 17 Resultado de la energía de los detalles Wavelet 1°, 2° y 3° (D1, D2 y D3), falla C1, velocidad 100% y carga 60%.
Durante la validación se encontró que la SVM implementada, presentó un error muy alto de error por falso positivo, 27.6%, pero en caso de falla el error por falso negativo es 0%. Este resultado se debe al comportamiento inestable y cíclico que tiene la energía de D3 y D7 dificultando tener una clara diferenciación en condición de falla. Por lo tanto, se deben estudiar otros indicadores y estudiar con detalle el comportamiento de la energía de la señal.
5.4 Clasificación basada en DWT: indicadores adicionales
Bajo el esquema propuesto, la DWT requiere de corrección de efectos de borde al trabajar con señales periódicas, de tal forma que no se presente ruido o distorsión de las señales cuando en la frontera se hace la convolución de la respuesta impulso del filtro con una parte de la señal con menor longitud que el filtro [36]. Se realizaron pruebas de los diferentes tipos de corrección de borde que proporcionaran una mayor estabilidad de los indicadores: sin corrección, smooth, periódico, antisimétrico y constante [37]. Adicionalmente, se implementaron los indicadores de energía, desviación estándar, valor pico a pico y curtosis con los cuales se buscó identificar un comportamiento característico de la condición de falla [31,32].
En el caso del indicador curtosis, se presentó una reducción de 39.3% en condición de falla para el detalle 3 cuando no se aplica ninguna corrección de borde, pero, al aplicar correcciones, ésta diferenciación se hace menos notoria, hasta un 6.4% con corrección smooth. Aun así, el indicador planteado de curtosis para cada uno de los detalles puede ser empleado para identificar una falla, puesto que en tres casos de corrección de borde: sin corrección, periódico y constante presenta cambios representativos para el detalle 1°, 2° y 3°, bandas de frecuencias asociadas frecuencias características de falla entre espiras. También se observa un crecimiento representativo en el caso del detalle 7 para la corrección antisimétrica, lo cual resalta el comportamiento del aumento de la corriente fundamental debido al desbalance de carga.
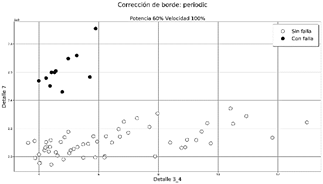
En la mayoría de las opciones, para los dos indicadores el crecimiento es uniforme a excepción de la energía con corrección smooth en donde se logra resaltar el crecimiento del detalle 2° y 3° (22.9%) en comparación al detalle 7° (3.2%) mejorando la diferenciación en condición de falla de la sección previa (ver Fig. 18).
Fuente: Elaboración propia.
Figura 18 Clasificación normalizada basado en energía de D3 vs D7, falla C1, velocidad 100% y carga 60%.
En la Fig. 19 se presenta uno de los ejemplos en los cuales se logra mejorar la diferenciación de las condiciones de falla con el cual se puede implementar algoritmos de clasificación con una mayor complejidad y exigencia.
6. Conclusiones
Durante la implementación del diagnóstico se logró encontrar un comportamiento diferenciando en los indicadores de falla logrando diversas mejoras en la precisión o exactitud de la clasificación y del diagnóstico. En donde cada uno de los análisis proponen mejoras o tienen alguna dificultad intrínseca, por ellos uno de los puntos fundamentales que requiere de análisis es la definición de los indicadores de falla de tal forma que se logre reconocer patrones de comportamiento asociados a la falla presente.
Se realizó el entrenamiento de la SVM basada en desbalances de corrientes (Valores AC), seguimiento de frecuencias asociadas a falla entre espiras basado FFT o indicadores (30 o más) a partir de DWT buscando la tolerancia a cambio del punto de operación e influencia de transitorios o fallas. En cada una de las opciones no se encontró una plena identificación del origen de la falla, por ello, se requiere que se implementen procesos intermedios de análisis como el análisis de componentes principales (PCA) para evaluar el aporte de los indicadores planteados en la diferenciación de conjuntos de datos, incluir SVM de más de una variable para mejorar el diagnóstico (análisis multivariable), combinar técnicas que propicien mejorar en las técnica de análisis como pueden ser la transformada Park [10], o implementar ANN y estimación probabilística que permita condicionar y relacionar varios indicadores.
Se requiere avanzar en la caracterización del comportamiento asociado a la falla en diversas condiciones de la operación del motor, del controlador y de la carga que permita determinar técnicas de análisis óptimas para la implementación MCU o DSP.

