











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. Introducción y antecedentes
Un número considerable de modelos matemáticos en dinámica discreta, incluso provenientes de diferentes procesos de discretización de ecuaciones diferenciales, conducen a una clase especial de sistemas dinámicos, los llamados skew products (por su terminología en inglés). Estos fueron definidos por Anzai [4] en 1951 para producir cierta clase de contraejemplos en teoría ergódica; tales sistemas aparecen de manera natural en el estudio de automorfismos de nilvariedades, ver [10]. Esta clase de sistemas dinámicos en forma general se definen de la siguiente manera: dados dos espacios topológicos X y Y , un endomorfismo F: X × Y → X × Y es llamado skew product si existen aplicaciones f: X → X y g: X × Y → Y tales que

El estudio de las transformaciones skew product tiene una amplia literatura matemática, por ejemplo: En [1], [2] se estudian propiedades ergódicas los skew productos, en particular, se establecen la fórmula de Abramov- Roklhin y así como cálculos de la entropía para skew productos. En [3] se analizan atractores extraños de tales mapas. Puede encontrarse diversas propiedades de bifurcación de mapas skew en [5]. En [6] se presentan conexiones de productos skew con la dinámica de mapas en el intervalo. Se presentan propiedades dinámicas a través de derivada Schwarziana en [7]. En [11] y [14], se analizan conjuntos invariantes relevantes de dichos mapas.
Dada una función f: ℝ → ℝ, digamos continua, denominamos acoplamiento skew de f al mapa F: ℝ2 → ℝ2 definido, para cada x; y 2 ℝ, por

Destacamos que esta clase particular de skew product ha sido considerado como modelo relevante para la transmisión de información a través de señales caóticas, la cual va acompañada frecuentemente de la noción de sincronización de sistemas; ver por ejemplo [8] y [9]. En este trabajo estudiaremos aspectos dinámicos del acoplamiento skew para la familia logística F
μ,

Donde μ > 1 y
2. Puntos críticos e imagen crítica
Como el mapa anterior F
μ,
J
0 es la unión de las rectas
 , ambas se
, ambas se
intersectan en el punto crítico
 siendo que
siendo que
 . Sigue por tanto que
. Sigue por tanto que
 ; de hecho
; de hecho

donde
 , para cualquier t
, para cualquier t

donde
 esto es,
esto es,
 es un rayo vertical con punto inicial en
es un rayo vertical con punto inicial en
 es una parábola horizontal hacia la izquierda con vértice en
es una parábola horizontal hacia la izquierda con vértice en
 . Las curvas que definen a J
1 dividen el plano en tres regiones abiertas: Z
0
;Z
2 y Z
4. Estas regiones abiertas son definidas por:
. Las curvas que definen a J
1 dividen el plano en tres regiones abiertas: Z
0
;Z
2 y Z
4. Estas regiones abiertas son definidas por:
cada una de estas están caracterizada por el constante número de preimágenes que tienen sus puntos; por ejemplo: en Z
0 no hay preimagen, en efecto, por definición (x
0
; y
0) Є Z
0 siempre que x
0
>

Figura 1. Imagen crítica
Observe que
 si y sólo si z = c
μ
; además, cada punto en F
μ,Є
(
si y sólo si z = c
μ
; además, cada punto en F
μ,Є
( es inyectiva, sin embargo, las preimágenes de puntos en F
μ,Є
(
es inyectiva, sin embargo, las preimágenes de puntos en F
μ,Є
( con
con
 tiene como preimagen 1 a 1 al rayo
tiene como preimagen 1 a 1 al rayo
 no obstante, cada punto en la rama inferior
no obstante, cada punto en la rama inferior
 tiene tres preimágenes, con una de las cuales se recorre el rayo
tiene tres preimágenes, con una de las cuales se recorre el rayo
 , las otras dos describen un par de curvas (del tipo
, las otras dos describen un par de curvas (del tipo
 ) simétricas respecto al rayo
) simétricas respecto al rayo
 El hecho de tener tres zonas con número diferentes de preimágenes implica, entre otras cosas, que las dinámicas del acoplamiento skew de F
μ,Є
y el producto (Є = 0) no son topológicamente conjugadas. Por otra parte, las curvas que definen
El hecho de tener tres zonas con número diferentes de preimágenes implica, entre otras cosas, que las dinámicas del acoplamiento skew de F
μ,Є
y el producto (Є = 0) no son topológicamente conjugadas. Por otra parte, las curvas que definen
 dividen el plano en seis zonas: Z
i
2 (i = 1; 2) y Z
j
4 (j = 1;2;3; 4); cada zona Z
i
2 (resp. Z
j
4 ) es mapeada de forma difeomórfica sobre Z
2 (resp. Z
4); ver Figura 2.
dividen el plano en seis zonas: Z
i
2 (i = 1; 2) y Z
j
4 (j = 1;2;3; 4); cada zona Z
i
2 (resp. Z
j
4 ) es mapeada de forma difeomórfica sobre Z
2 (resp. Z
4); ver Figura 2.
Figura 2. Ilustración de F μ,Є -1(J 1)
3. Puntos fijos y diagrama de bifurcación
Otros elementos importantes de considerar en la descripción de la dinámica de F ; son sus puntos fijos y la variación de su naturaleza hiperbólica. Es fácil ver que los puntos fijos de F μ,Є son: O denotará al origen del plano

Las respectivas matrices jacobianas en esos puntos son:
El siguiente cuadro refleja los autovalores y autoespacios relativos a cada punto fijo.
| Punto fijo | Autovalores | Autoespacios asociados |
| O | λ 1 = µ λ 2 = µ − c | E 1 = {(x, y) : x = y} E 2 = {(x, y) : x = 0} |
| P µ,c | λ 1 = µ λ 2 = −µ + c + 2 |
2−−2
|
| Q µ,c | λ 1 = 2 − µ λ 2 = 2 − µ − c | E 1 = {(x, y) : x = y} E 2 = {(x, y) : x = 0} |
| R µ,c | λ 1 = 2 − µ λ 2 = µ + c |
|
En base a esta información se construye, en términos de los parámetros μ y Є, un diagrama de bifurcación para cada punto fijo. Por ejemplo, para el origen y P μ,Є tenemos en primer lugar, que estos puntos coinciden cuando μ = 1 + Є; de hecho, en la región 1 < μ < 1 + Є el origen O es silla hiperbólica y P μ,Є repulsor; cuando 1 + Є < μ < 3 + Є, O es repulsor y P μ,Є silla hiperbólica; mientras que si μ > 3 + Є ambos puntos son repulsores.
Dado que la fibra 0 x ℝ, es decir el eje y es invariante, la dinámica en ella es dada por la función h
μ,Є
(t) = f
μ(t) Єt, la cual mediante el cambio de variables x =  . Similares análisis y comentarios se hacen para los restantes puntos fijos.
. Similares análisis y comentarios se hacen para los restantes puntos fijos.
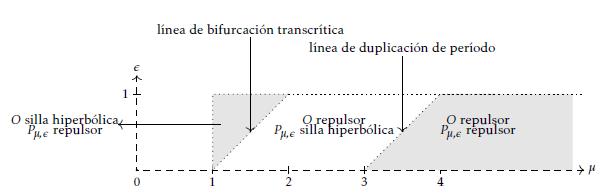
Para O siempre vale λ 1 > λ 2. Este punto fijo es silla hiperbólica cuando µ < 1 + Є y repulsor cuando µ > 1 + Є
● Cuando µ < 1 + Є el punto P
µ,c
es repulsor, en el intervalo 1 + Є < µ < 3 + Є es silla hiperbólica y vuelve a ser repulsor cuando µ > 1 + Є. Cuando µ = 3 + Є, λ
2 = -1 y se inicia una cascada de duplicación de período (ver [13] [Capítulo 3 ]), esta bifurcación se despliega sobre el conjunto {(x, y) : x = 0}, donde la dinámica es gobernada por h
0(t) = (µ − Є)t − µt
2. Sobre el autoespacio E
2 opera la menor expansión excepto en el caso µ < 1 +
●El punto fijo Q
µ,Є
es atractor si µ < 3 − Є, es silla hiperbólica cuando 3 − Є < µ < 3 y es repulsor si µ > 3. Cuando µ = 3− Є se tiene λ
2 = −1 y comienza un cascada de duplicación de período la cual se manifiesta en la fibra invariante
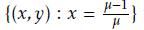 y es gobernada por la dinámica de
y es gobernada por la dinámica de
 . Mientras que si µ = 3, entonces λ 1 = -1 y se da inicio a otra cascada de duplicación de período pero esta vez sobre la diagonal, cuya dinámica es regida por f
µ
.
. Mientras que si µ = 3, entonces λ 1 = -1 y se da inicio a otra cascada de duplicación de período pero esta vez sobre la diagonal, cuya dinámica es regida por f
µ
.
● Para R µ, Є siempre se tiene λ 2 > |λ 1| y λ2 > 1. Si µ < 3, este punto fijo es una silla hiperbólica; y es repulsor cuando µ > 3. El autovalor λ1 alcanza el valor de -1 cuando µ = 3, ello marca el inicio de una cascada de duplicación de período esta vez sobre una curva invariante cuya dinámica es regida por f µ ; esto es mostrado en [12]. Ver Figura 4.
4. Infinito como atractor
El cuarto ingrediente en nuestro trabajo es la propiedad de atracción en el infinito. En general, un endomorfismo F: ℝ
n
→ ℝ
n
admite a 1 como atractor si existe una vecindad w de 1 (complemento de un compacto) tal que F(W )  . Se llama cuenca inmediata de 1 a la mayor componente conexa en B
∞, se denota por B
0
∞.
. Se llama cuenca inmediata de 1 a la mayor componente conexa en B
∞, se denota por B
0
∞.
Note que si W es como arriba, entonces un punto z tiene órbita acotada si z Є ℝ
n
/ W . Destacamos que el compacto ℝ
n
/ W no tiene porque ser F-invariante, de hecho puede contener componentes de la cuenca de atracción de 1. Tal es el caso de la familia logística f
μ; es bien conocido que W = (-∞,0)
Suponga que F: ℝ
n
→ ℝ
n
tiene a ∞ como atractor y que W es como arriba, entonces Λ= ℝ
n

No es difícil mostrar que Λ es completamente invariante; es decir, F 1(Λ) = Λ. Por tanto en Λ hay dinámica, posiblemente no trivial. Así que en general se desea conocer tan-to la dinámica de F restricta a Λ como la geometría de este conjunto. Otro asunto de gran interés es conocer la frontera de Λ; esta separaría (en cierto sentido) la cuenca de atracción en 1 con las cuencas de atracción de otros atractores, que obviamente están en Λ; todo esto es de manera general, y muchas veces (dependiendo de cómo es F) sus respuestas o bien son triviales, o en ocasiones difíciles de formular.
En nuestro análisis de la dinámica de F
μ,Є
como en (1.3), la meta es explicar cómo encontrar un conjunto compacto K

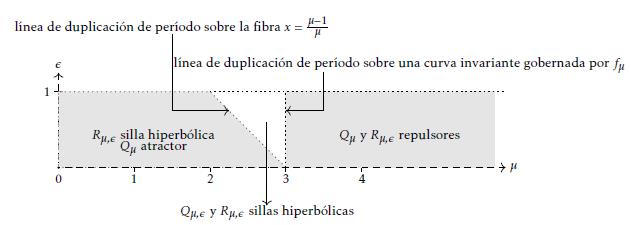
Con base a esto afirmamos que existen β1 ≤ 0 y β2 ≥ 1 tales que K = [0;1] [β1
; β2] es un compacto invariante con órbitas acotadas. Más aún, los valores de β1 y β2 pueden ser determinados de manera que: h
μ,Є
(β1) = h
μ,Є
(β 2) y (0, β1) Є P (μ, Є, β1); observe que (0;1)
5. Sobre las componentes del mapa Skew
En esta sección analizamos la dinámica de las componentes del mapa skew, explorando la existencia de un compacto invariante. Para simplificar las cuentas para cada x Є ℝ hacemos

obviamente F μ,Є (x,y) = (f μ (x); h x (y)), para todo x; y Є ℝ. Resaltamos que para todo n ≥ 1 y x; y 2 ℝ se tiene

donde
 .
.
Ahora profundizaremos en el entendimiento de h
x
, primero notemos que h
x’ x(y) = μ-Є-2μy, por lo que el único punto crítico de
 y el valor máximo de h
x
es
y el valor máximo de h
x
es
 También es claro que un punto es fijo para h
x
si y sólo si es raíz de (μ - Є -1)y - μy
2 + Єx = 0. Por tanto h
x
tiene puntos fijos si y sólo si
También es claro que un punto es fijo para h
x
si y sólo si es raíz de (μ - Є -1)y - μy
2 + Єx = 0. Por tanto h
x
tiene puntos fijos si y sólo si
 en tal caso, estos puntos fijos son dados por
en tal caso, estos puntos fijos son dados por
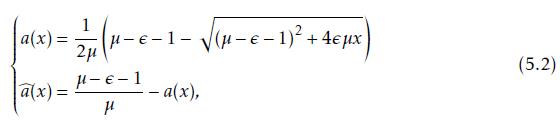
obviamente α(x) es la menor raíz de (μ - Є - 1) γ - μγ2 + Єx = 0. También es claro que si x es un punto fijo de f μ, entonces (x;α(x)) es el punto fijo de F μ,Є en la fibra {x} x ℝ con menor ordenada; más precisamente

Denotemos por b(x) la otra preimagen de α(x) según h x ; es decir

en otras palabras

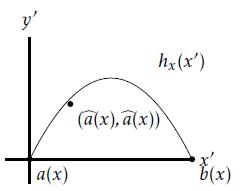
claramente α(x) + b(x) = 2d, α (x) ≤ 0 y b(x) > 0. Por otra parte, es simple verificar que

Así, el gráfico de h
x
tiene sus puntos fijos como lo indica la Figura 6, es decir: (α(x); a(x)) en el t/ercer cuadrante, (
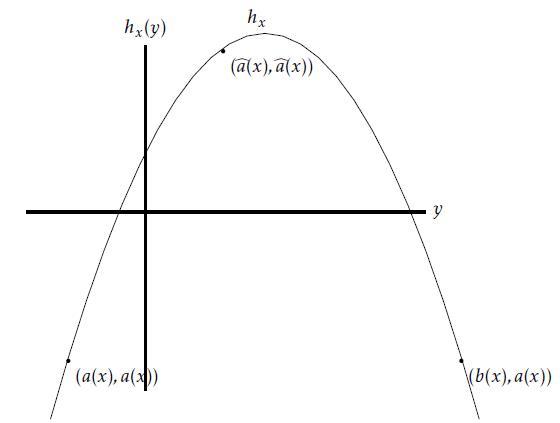
Note que α(x) siempre es repulsor y
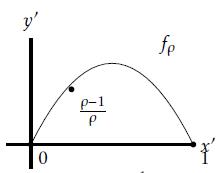
Para cada x Є [0;1], el mapa h x se escribe como f ρ (x) , en forma más precisa se tiene
Lema 5.1. Dado x Є [0;1] fijo, el mapa h x es topológicamente conjugado a un elemento f ρ (x) de la familia logística.
Demostración. Para x Є [0; 1] fijo, escribimos
 , consideremos la transformación afín,
, consideremos la transformación afín,
 con α y β por determinar, su inversa es
con α y β por determinar, su inversa es
 , hagamos
, hagamos
 , entonces se cumplen las igualdades
, entonces se cumplen las igualdades

Tomando
 entonces g se escribe como g(y) = y
2+k, donde
entonces g se escribe como g(y) = y
2+k, donde
 , el término sobrante.
, el término sobrante.
Ahora tomamos una segunda transformación afín
 , tenemos que
, tenemos que

 , obtenemos las igualdades
, obtenemos las igualdades
Haciendo δ2 δ + k = 0, en particular tomando
 la raíz positiva y γ : =
la raíz positiva y γ : =
 , entonces resulta
, entonces resulta
 Eligiendo ρ
(x) =
Eligiendo ρ
(x) =
 , entonces
, entonces
 por transitividad de la conjugación, también h
x
es conjugada a fρ
(x)
, lo cual concluye la prueba.
por transitividad de la conjugación, también h
x
es conjugada a fρ
(x)
, lo cual concluye la prueba.
Esquemáticamente ilustramos el lema anterior donde la parábola de h x se ve como lo ilustra la Figura 7.
Así, la conjugación lleva la parábola h x en la logística cuya gráfica es dada en la Figura 8.
Note que los intervalos I
x
= [a(x); b(x)] son estrictamente crecientes:
 siempre que x
2
> x
1; esto es, a(x
2) < a(x
1) y b(x
2) > b(x
1) para todo x
2
> x
1; también es claro que
siempre que x
2
> x
1; esto es, a(x
2) < a(x
1) y b(x
2) > b(x
1) para todo x
2
> x
1; también es claro que

Adicionalmente, como {x} x ℝ es mapeado por
 , para todo t
, para todo t

se tiene que

en particular, M x > b(x) para cada x Є [0;1] si y sólo si μ > 4 + Є.
6. Detección de un buen compacto invariante
Este apartado de nuestro estudio tiene como meta detectar un compacto invariante Q tal que la dinámica del acoplamiento skew F μ,Є fuera de Q sea trivial, es decir todo punto fuera de Q tenga ω-límite vacío este es el resultado principal de nuestra investigación, el cual enunciamos a continuación
Teorema 6.1. El sistema (1.3) admite un conjunto compacto invariante Q tal que su complemento es positivamente invariante y todo punto en Q c tiene conjunto ω -límite vacío.
Demostración. Recordemos que dado un número real β, la imagen de la recta horizontal y = β es la parábola P (μ,Є,β) de ecuación:

Al hacer uso de la función h x (h x (y) = fμ(y) -Єy + Єx), la expresión de arriba es:

Note que cuando
 esta parábola es la de valores críticos
esta parábola es la de valores críticos

cuyas ramas inferior y superior son dadas, respectivamente, por

En general, las ramas superior e inferior de la parábola P (μ,Є,β) son dadas por

en particular los valores de y en la expresión anterior cuando x = 0 son

Deseamos un valor de β de forma que h
1(β) = β, así β es a(1) ó
1.Q ∩ P(c, µ, α(1)) = Q ∩ P(c, µ, b(1)) = {(0, α(1))}.
2. Dado β
Sean
 de lo anterior se deduce que
de lo anterior se deduce que
 de hecho, también permite concluir que los puntos en Q
- tienen órbita no acotada. En realidad esto es una situación particular de la propiedad general que se enuncia en el siguiente resultado que puede encontrarse en [12], Lema 2.1.
de hecho, también permite concluir que los puntos en Q
- tienen órbita no acotada. En realidad esto es una situación particular de la propiedad general que se enuncia en el siguiente resultado que puede encontrarse en [12], Lema 2.1.
Lema 6.2. Sean E: ℝ
n
→ℝ
n
continua, W

Note que Λ es el conjunto de puntos cuyas órbitas son acotadas; observe también que Λ es completamente invariante; esto es, F μ,Є −1 (Λ) = Λ.
La vecindad Q arriba considerada no es la única con la propiedad descrita. Otra forma de obtener una tal vecindad es la siguiente. Primero considere cualquier
 es simple verificar que la preimagen, según F
μ,Є, de la recta definida por y = x + t es la circunferencia C
t
(ver Figura 9) cuya ecuación es
es simple verificar que la preimagen, según F
μ,Є, de la recta definida por y = x + t es la circunferencia C
t
(ver Figura 9) cuya ecuación es

Figura 9. Circunferencia C t
Claramente todas estas circunferencias tienen el mismo centro en el punto c = (c
1
; c
2), donde
 .
.
Definamos
 para cada x; y Є ℝ; note que la curva de nivel t; i.e. g
-1(t), es justamente
para cada x; y Є ℝ; note que la curva de nivel t; i.e. g
-1(t), es justamente
 ; además, el único punto crítico de g es el centro de las circunferencias C
t
, adicionalmente:
; además, el único punto crítico de g es el centro de las circunferencias C
t
, adicionalmente:

así que
 es una partición de
es una partición de
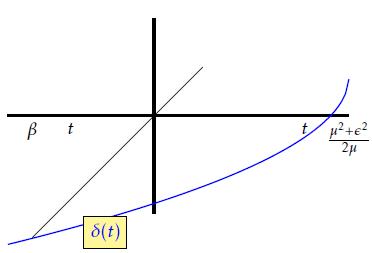
 observe que mientras mayor sea el valor del nivel, menor es el radio de la respectiva circunferencia. Por otra parte, el lugar geométrico donde ocurren las tangencias de las circunferencias C
t
con rectas y = -x + δ es dado por la recta de ecuación y = x -
observe que mientras mayor sea el valor del nivel, menor es el radio de la respectiva circunferencia. Por otra parte, el lugar geométrico donde ocurren las tangencias de las circunferencias C
t
con rectas y = -x + δ es dado por la recta de ecuación y = x -

podemos ver que estos puntos son:
 ; donde
; donde

Con estas observaciones note que la recta antidiagonal tangente a C t en p es la dada por y = x + δ(t) donde

Observe que los puntos fijos de t → δ(t) son aquellos valores t tales que la recta que genera a C t (y = x + t) coincide con la recta antidiagonal tangente (y = x + δ (t)) a C t en el punto p. Es simple mostrar que t → δ (t) tiene a lo más dos puntos fijos y siempre uno de ellos es negativo. Si β es el menor de tales puntos fijos, entonces

Con esta selección del punto fijo β siguen inmediatamente:
La recta y = x + β no solo genera a C β como preimagen sino que también es tangente antidiagonal por el respectivo punto p.
Para cada t < β, la recta y = x + t (que genera a C t como preimagen) está por debajo de y = x + δ(t) (tangente antidiagonal a C t ) y C β int C t .
Mientras que para cada t > β, la recta y = x + t está por encima de y = x + β(t) y en este caso C t
Para el β seleccionado denotamos por W el semiespacio definido por todos los (x; y) tales que y < x + β. Es simple mostrar que F
μ,Є
(W )
Esto nos da otra construcción de un tal Q y concluye la prueba.
En lo que sigue analizamos algunas propiedades de los conjuntos invariantes construidos.
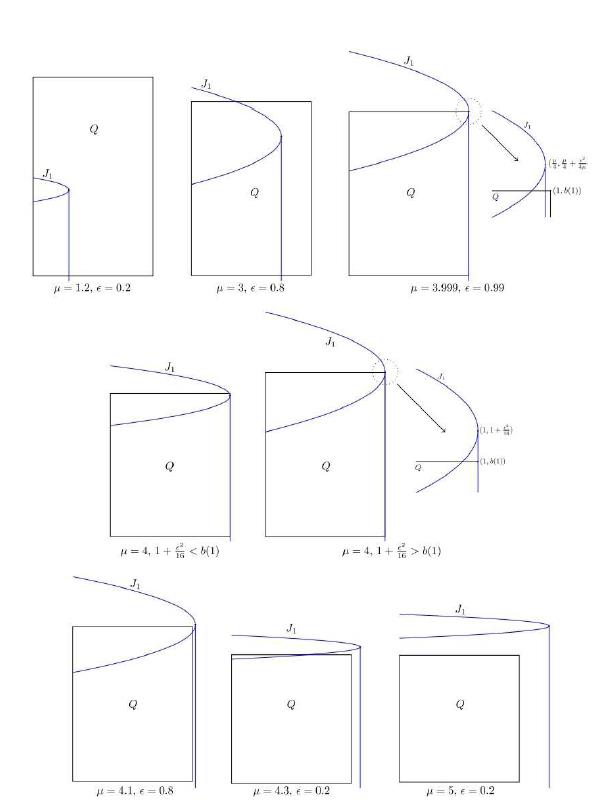
7. Posiciones relativas
Fijemos Q = [0;1] [a(1); b(1)] como la primera aproximación compacta para describir el conjunto de puntos con órbitas acotadas (complemento de la cuenca B
∞ del atractor en el infinito). En adelante este conjunto es denotado por Λμ,Є pues depende de los parámetros Є y μ ya sabemos
 . Dado que queremos analizar preimágenes de Q, es importante conocer las posiciones relativas de Q y el conjunto de valores críticos J
1: unión del rayo
. Dado que queremos analizar preimágenes de Q, es importante conocer las posiciones relativas de Q y el conjunto de valores críticos J
1: unión del rayo
 y la parábola crítica
y la parábola crítica
 . Para esto debe tenerse en cuenta:
. Para esto debe tenerse en cuenta:
1. La ordenada b(1) de los vértices superiores de Q.
2. Las ordenadas de los puntos de intersección de
 con el eje x = 0, estos son:
con el eje x = 0, estos son:
 los mismos corresponden con los valores máximos de las funciones h
0 y h
1 respectivamente.
los mismos corresponden con los valores máximos de las funciones h
0 y h
1 respectivamente.
3. El vértice
 de la parábola
de la parábola
 .
.
Para facilitar, posiblemente, las notaciones y cuentas hagamos

Una cuenta directa muestra, con
 que:
que:
Una primera observación obvia: cada uno de los segundos factores en las expresiones anteriores son positivas para todo valor μ > 1 y ε Є (0 1); basta observar que δ> 0 y que
 ; de donde
; de donde

Es fácil ver que (7.2) se cumple para todo µ ≥ 4 + c y c ∈ (0, 1). Tampoco es difícil verificar que D < 0 para cada c ∈ (0, 1) y todo 1 < µ ≤ 3; así mismo, D < 0 si µ = 4 − c, cualquiera sea 0 < c < 1. Sin embargo, para cada µ ≤ 4 cercano a 4, siempre hay al gún c ∈ (0, 1) de forma que D > 0. Para mostrar esto fijemos cualquier µ > 1, dado que
 y
y
 sigue inmediatamente que
sigue inmediatamente que
 si sólo si
si sólo si
 . Observe que esta desigualdad es válida para µ = 4, luego por continuidad existe δ > 0 tal que para todo 0 < P < δ la desigualdad continua siendo válida para µ = 4 − P. De esta forma, para todo P ∈ (0, δ) y cada ε ∈ (0, 1) se cumple
. Observe que esta desigualdad es válida para µ = 4, luego por continuidad existe δ > 0 tal que para todo 0 < P < δ la desigualdad continua siendo válida para µ = 4 − P. De esta forma, para todo P ∈ (0, δ) y cada ε ∈ (0, 1) se cumple
 de acá que para cada ρ Є (0,δ) podemos elegir ε ∈ (0; 1) de manera que (7.2) valga para este ∈ y μ = 4-ρ
de acá que para cada ρ Є (0,δ) podemos elegir ε ∈ (0; 1) de manera que (7.2) valga para este ∈ y μ = 4-ρ
En cuanto a D
1, no es difícil ver que D
1
< 0 para todo μ≤ 4 + ε y cada ε ∈ (0,1). De hecho, dado que
 se tiene
se tiene
 cualesquiera sean μ > 1 y ε ∈ (0,1); y como
cualesquiera sean μ > 1 y ε ∈ (0,1); y como
 la afirmación sigue. También se muestra que D
1
> 0 para todo c (0, 1) y µ 5+c. Además, cuando µ = 5 se tiene que D
1 varía de signo con c; de hecho D
1
> 0 si c es próximo de 0, y es negativo si c es cercano a 1.
la afirmación sigue. También se muestra que D
1
> 0 para todo c (0, 1) y µ 5+c. Además, cuando µ = 5 se tiene que D
1 varía de signo con c; de hecho D
1
> 0 si c es próximo de 0, y es negativo si c es cercano a 1.
Con relación a D 2 dado que

se puede demostrar sin dificultad:
a) Para todo µ ≥ 4 y c ∈ (0, 1), D 2 > 0.
b) Para cada
 se tiene D
2
< 0.
se tiene D
2
< 0.
c) Cuando µ varía en el intervalo
 cambia de signo.
cambia de signo.
Las siguientes gráficas en Figura 11 evidencian numéricamente lo anterior.
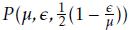
8. Comentarios sobre preimágenes
Consideremos cualquier punto (u, v) Єℝ2 que admita preimágen; es decir, que exista al menos un punto (x, y) tal que E µ,c (x, y) = (u, v); esto equivale a f µ (x) = u y k x (y) = v; recuerde que h x : ℝ → ℝ es definida, para cada x ∈ ℝ, fijo por h x (t) = (µ − Є)t − µt 2 + Єx, cualquiera sea t ∈ ℝ; recuerde además que

Es claro que f
μ(x) = u admite solución en x si y sólo si u ≤

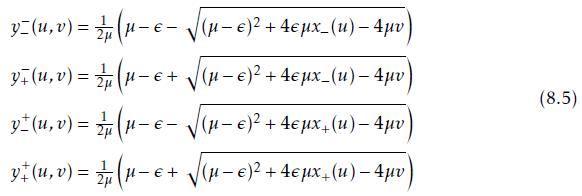
definen las soluciones de f μ(x) = u. Por otra parte, para cada uno de los valores u-dependientes de arriba, x_(u) y x +(u), la ecuación h x (y) = v admite soluciones si y sólo si v ≤ max h x ; es decir

en cualquiera de estos casos, las soluciones en y de h x (y) = v son descritas por

Las desigualdades en (8.2) determinan lugares geométricos distinguidos e importantes para el análisis y descripción de la dinámica de F
μ,Є. La primera de estas desigualdades corresponde a la clausura de la región abierta Z
4 cuya frontera es la rama inferior de la parábola
 y el rayo
y el rayo
 ; la segunda desigualdad define justamente el epigrafo de
; la segunda desigualdad define justamente el epigrafo de
 denotamos por Z
2 el interior de este epigrafo, ver Figura 12.
denotamos por Z
2 el interior de este epigrafo, ver Figura 12.
Analicemos el comportamiento de los puntos en cada una de las zonas arriba descritas.
● Caso A.  . Obviamente
. Obviamente
 e inmediato verificar que u ≥
e inmediato verificar que u ≥
 . Note que en estas condiciones
. Note que en estas condiciones
 y claramente
y claramente
 , de manera que (8.3) tiene sentido tanto para x = x
_(u) como para x = x+(u); por lo cual F
-1
μ,Є (u,v) contiene a los más cuatro puntos:
, de manera que (8.3) tiene sentido tanto para x = x
_(u) como para x = x+(u); por lo cual F
-1
μ,Є (u,v) contiene a los más cuatro puntos:

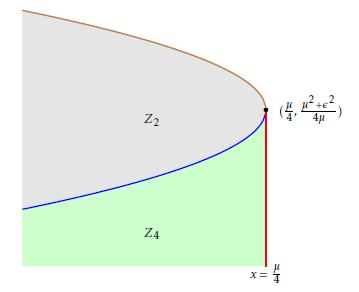
Figura 12 Ilustración del conjunto de valores críticos J
1 = P (μ,Є,
Siendo que
Aprovechamos las expresiones en (8.1), (8.4) y (8.5) para hacer algunas precisiones sobre el caso que estamos tratando: A1.A1.
1. Si
 , entonces los pares ordenados en (8.4) son coincidentes con el punto crítico
, entonces los pares ordenados en (8.4) son coincidentes con el punto crítico
 ; es decir
; es decir
Por otra parte, si
 , entonces además de
, entonces además de
 , se tiene
, se tiene

en consecuencia todo punto en el rayo
 tiene exactamente dos preimágenes, estas se ubican simétricamente respecto del punto crítico
tiene exactamente dos preimágenes, estas se ubican simétricamente respecto del punto crítico
 . Observe que en cuanto v recorre
. Observe que en cuanto v recorre
 , las preimágenes de (u;v) recorren toda la línea crítica
, las preimágenes de (u;v) recorren toda la línea crítica

2. Si (u;v) está en la rama inferior de
 , excepto el valor crítico
, excepto el valor crítico
 entonces se muestra:
entonces se muestra:

Por tanto F μ,Є -1 (u; v) contiene exactamente tres puntos:

Haciendo uso de las fórmulas en (8.5) y el hecho que (u; v) está en la rama inferior de
 se deduce por un lado que
se deduce por un lado que

y además, al recorrer (u;v) la rama inferior de
 y el par de puntos
y el par de puntos
 recorren, respectiva y unívocamente, el rayo:
recorren, respectiva y unívocamente, el rayo:

y la parábola
 de ecuación
de ecuación

Ver Figura 13 para una ilustración geométrica.
Figura 13 Ilustración de la ubicación las preimagen de un punto (u,v) en la rama inferior de la parábola
3. Supongamos ahora que (u,v) está en la región abierta Z
4 cuya frontera es la rama inferior de
 y el rayo
y el rayo
 . Esto significa que
. Esto significa que
Atendiendo a estas condiciones y a las fórmulas en (8.1) y (8.5) se tiene

de donde se desprenden las siguientes conclusiones:
A3.1 Los puntos
 se disponen simétricamente con respecto al rayo crítico
se disponen simétricamente con respecto al rayo crítico
 .
.
A3.2 Los puntos
 se ubican al lado derecho de
se ubican al lado derecho de
La ubicación de estos cuatro puntos se distribuye conforme indica la Figura 14.
● Caso B.
 Esto indica que (u;v) está en el epigrafo de
Esto indica que (u;v) está en el epigrafo de

 . Dado que hemos analizado el caso en que (u,v) esté en la rama inferior de
. Dado que hemos analizado el caso en que (u,v) esté en la rama inferior de
 , supondremos que (u,v) está por encima de esa rama, es decir:
, supondremos que (u,v) está por encima de esa rama, es decir:
 ; luego no es difícil ver que:
; luego no es difícil ver que:

por lo que de (8.3) sigue que a lo más hay dos puntos (x,y) en F μ,Є -1 (u,v):

B1.B1.
1. Supongamos que el punto (u,v) está sobre la rama superior de
 , esto es:
, esto es:
 . En este caso
. En este caso
 , por tanto F
μ,Є
-1
(u,v) es un único punto:
, por tanto F
μ,Є
-1
(u,v) es un único punto:
 ; además, al recorrer (u,v) esa ramade
; además, al recorrer (u,v) esa ramade
 recorre unívocamente el rayo
recorre unívocamente el rayo
 .
.
2. Si (u,v) está en el interior del epigrafo de
 , entonces
, entonces

De acá entonces que F μ,Є -1 (u,v) contenga exactamente dos puntos:

también se deduce que estos puntos se encuentran en el interior del epigrafo de la parábolae
 y se disponen simétricamente con respecto al rayo
; ver Figura 14.
y se disponen simétricamente con respecto al rayo
; ver Figura 14.
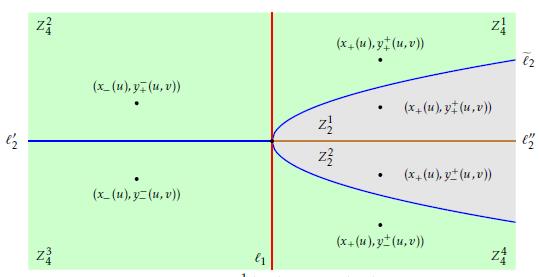
Figura 14 Ubicación de los cuatro puntos en F μ,Є -1 (u; v) cuando (u,v) está en la región abierta Z 4 (zona en verde), y ubicación de las dos preimágenes cuando (u,v) está en Z 2 (zona en gris).
En este trabajo hemos usado varias técnicas que para determinados parámetros ( ; ) nos permiten detectar un conjunto compacto invariante para (1.3), con lo cuál tenemos herramientas para estudiar zonas ricas en dinámica. En particular, se tienen zonas donde las órbitas son acotadas y otras donde no son acotadas.

