










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería e Investigación
Print version ISSN 0120-5609
Ing. Investig. vol.26 no.3 Bogotá Sep./Dec. 2006
Claudia Marcela Sánchez R.1, Jair Leopoldo Loaiza B.2 y Carlos Julio Cortés R.3
1 Ingeniera mecánica, Universidad Nacional de Colombia, Bogotá. Asesor, Programa Nacional de Desarrollo Tecnológico Industrial y Calidad, Colciencias. Docente ocasional, Departamento de Ingeniera Mecánica y Mecatrónica, Universidad Nacional de Colombia, Bogotá. cmsanchezr@unal.edu.co, cmsanchezr@gmail.com
2 Ingeniero mecánico, Universidad Nacional de Colombia, Bogotá. Docente Ocasional, Departamento de Ingeniera Mecánica y Mecatrónica, Universidad Nacional de Colombia, Bogotá. jlloaizab@unal.edu.co
3 Ingeniero mecánico. M.Sc. en Materiales y Procesos de Manufactura. Comisión de estudios de Doctorado en Manufactura. Profesor asociado, Departamento de Ingeniería Mecánica y Mecatrónica, Universidad Nacional de Colombia, Bogotá. cjcortesr@unal.edu.co
RESUMEN
El trabajo que se lleva a cabo en la ingeniería de rehabilitación es el de desarrollar productos asociados con la rehabilitación física, principalmente prótesis para amputaciones de miembro superior o inferior. El desarrollo de tales productos implica la aplicación de diseño mecánico, selección de materiales y procesos de manufactura adecuados para sustituir algunas de las funciones que el paciente puede haber perdido. El trabajo que se presenta tiene como propósito establecer una solución óptima para suplir la necesidad de un paciente con amputación de antebrazo a nivel proximal de codo. Este artículo describe el proceso que se ha seguido, desde entender el lenguaje médico, hasta desarrollar un prototipo funcional que sea capaz de sustituir dos funciones del miembro superior como lo son la pinza tridigital y el movimiento de pronación y supinación del antebrazo.
Palabras clave: prótesis mioeléctrica de mano, pronación, supinación, diseño mecánico.
ABSTRACT
Rehabilitation Engineerings work consists of developing products associated with physical rehabilitation, mainly prostheses for upper and lower extremity amputees. Developing such products implies mechanical design and the suitable selection of materials and manufacturing process to replace some of the functions which a patient may have lost. The work presented here was aimed at establishing an optimal solution for substituting the needs of a patient having had the forearm amputated at the proximal level of the elbow. This article describes the whole process followed, from understanding the medical language to developing a functional prototype able to replace the arms two functions (i.e. the hand and forearms pronation and supination movements).
Keywords: myoelectric hand prostheses, pronation, supination, mechanical design
Recibido: junio 16 de 2005
Aceptado: septiembre 19 de 2006
Antecedentes
En el Grupo de Investigación en Biomecánica de la Universidad Nacional de Colombia (GIBM-UNCB No. COL0009476) se ha venido trabajando sobre prótesis para miembro superior desde los años 90. Dentro de los desarrollos en este campo se encuentra el proyecto de investigación Desarrollo de prótesis mioeléctrica de mano, el cual dio origen a la elaboración de este trabajo. La investigación mencionada fue apoyada por la División de Investigaciones de Bogotá, DIB, Cod. 80814, fases 1 y 2 (2002-2003). En el marco del proyecto aprobado por la DIB, durante el año 2002 se llevó a cabo el proceso de diseño de un prototipo en el trabajo Sistema mecánico para prótesis mioeléctrica de mano, el cual incluía tres módulos que pretendían suplir tres de las funciones que habría perdido un paciente con amputación proximal de codo (Figura 1).
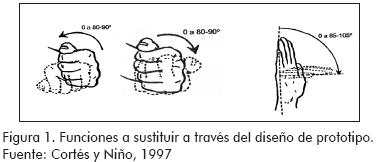
Los módulos diseñados fueron una pinza tridigital para suplir la función de prensión, un rotador para suplir la pronación supinal del antebrazo, y un flexo extensor para suplir las funciones de flexión extensión.
Una vez revisado el diseño del prototipo, se encontró que era necesario optimizar ciertos elementos que impedían un adecuado funcionamiento, y por ende minimizaban las ventajas de la solución propuesta. Por esta razón fue necesario dividir el proyecto y buscar una solución más adecuada para el diseño de los tres módulos que lo componían inicialmente.
El desarrollo de este trabajo pretende optimizar el prototipo mediante el diseño independiente de dos de los tres módulos.
Objetivos
-Rediseñar y construir un prototipo de pinza tridigital para prótesis mioeléctrica de mano encaminada a mejorar la prensión palmar y reducción del peso con respecto al diseño del proyecto Sistema mecánico para prótesis mioeléctrica de mano.
-Rediseñar un prototipo de rotador para prótesis mioeléctrica de mano encaminada a mejorar las características del diseño del proyecto Sistema mecánico para prótesis mioeléctrica de mano.
-Evaluar el sistema de transmisión de potencia de la prótesis en relación con su eficiencia.
-Estudiar sistemas de transmisión de potencia alternos encaminados a mejorar las condiciones actuales.
Metodología de diseño
Identificación del problema
Se pretende suplir la necesidad de un paciente con amputación proximal de codo (Nardin Frankel, 2001) para las siguientes funciones específicas:
-Prensión tridigital
-Pronación supinal de antebrazo.
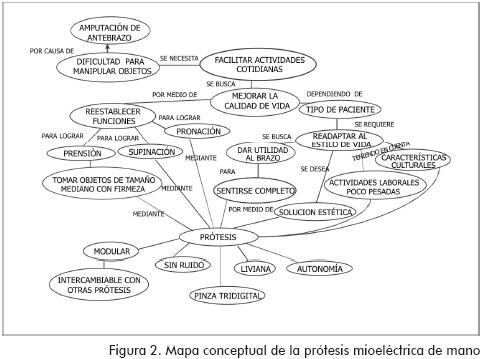
El mapa conceptual del desarrollo del prototipo se presenta en la Figura 2.
Específicamente se busca que los prototipos de los dos módulos, tanto la pinza tridigital como el rotador, permitan que el paciente pueda llevar a cabo las siguientes actividades:
-Pronación supinal de antebrazo
-Agarre de fuerza: por oposición de los dedos flejados
-Prensión más estable que en el caso de una prensa bidigital
-Fuerte prensión para retener objetos largos
-Manejo de objetos delicados y sostenerlos firmemente con movimiento casi normal
-Apariencia estética similar en estructura a la de la mano
-Actividades normales poco pesadas en el trabajo
La identificación de las actividades que debe realizar el paciente permite establecer las características primarias del prototipo a diseñar.
Como se busca que el paciente tenga una mejor calidad de vida y que el uso de una prótesis le permita minimizar el impacto de su discapacidad, y dadas las condiciones en que se presenta este tipo de amputación es mas cómodo y viable que el paciente se adapte a una prótesis con fuente de energía extracorpórea, la propuesta es el diseño de los prototipos de pinza tridigital y rotador para una prótesis bioeléctrica (Franca et al., 2002).
El principio de este tipo de prótesis es el control mioeléctrico (De Vincenzo et al., 2000), el cual se basa en el concepto de aprovechamiento de la energía residual del músculo, es decir: siempre que un músculo se contrae, se produce una pequeña señal eléctrica (EMG) que es creada por la interacción química en el cuerpo. Esta señal es muy pequeña (5 a 200 microvoltios) (Alonso et al., 2002). En un paciente con prótesis bioeléctrica (Dario et al., 2000), para registrar dicho tipo de señales se utilizan sensores (electrodos) que se ponen en contacto con la superficie de la piel. Una vez registrada la señal, se amplifica y es procesada después por un controlador que conmuta los motores encendiéndolos y apagándolos en la mano, la muñeca o el codo para producir movimiento y funcionalidad (Schulz et al., 2001).
Documentación relacionada con los pacientes
Para hacer un diseño adecuado de prótesis es necesario tener en cuenta que este elemento debe reemplazar una parte del cuerpo humano y que, por lo tanto, debe guardar unas proporciones adecuadas para que tenga una apariencia natural. Por esta razón es necesario restringir las dimensiones a las medidas antropométricas, si no de cada paciente en particular, por lo menos de un grupo étnico en general (Nardin Frankel, 2001).
En la Tabla 1 se relacionan las características antropométricas de peso y longitud en el caso de pacientes colombianos (Cortés y Niño, 1997).
Para el diseño del prototipo se tomaron los datos antropométricos de un paciente masculino, ya que en Colombia son los hombres quienes más sufren de este tipo de amputación, con un peso de 64 kg y una estatura de 1,70 m. Teniendo en cuenta el tipo de paciente para el cual se va a realizar el diseño, se seleccionan las condiciones de operación: la fuerza para realizar la prensión tendrá una carga de 80 N y levantará una carga de 2 kg con el rotador. Los valores máximos de peso y longitud del prototipo, de acuerdo con las restricciones dadas por la antropometría del paciente, son: longitud máx. 364,65 mm, peso máx. 1612,8 g.
Especificaciones de diseño
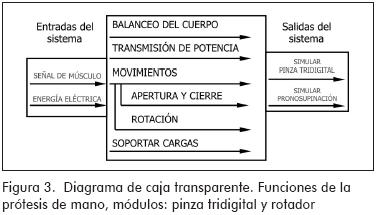
El diagrama de funciones de la prótesis que se muestran en la Figura 3, permite identificar las especificaciones de diseño.
Iniciar el proceso de diseño utilizando la técnica de despliegue de función de calidad (Quality Function Deployment, QFD), requiere vincular la voz de los profesionales de la salud, para lo cual es necesario identificar sus necesidades, que en este caso son las de los médicos ortopedistas, rehabilitadores, fisiatras, fisioterapeutas, psicólogos, técnicos protesistas, pacientes y sus familiares.
Los requerimientos de la prótesis son los siguientes:
Una vez identificados los requerimientos del usuario se procede a traducirlos en variable de ingeniería mediante la implementación del QFD (Akao, 1990), con el propósito de cumplir con las expectativas de la población que lo requiere, incluyendo la voz del cliente en el diseño del mismo. Las variables de ingeniería, extraídas de la casa de la calidad (House of Quality), se presentan en la Tabla 3.
Una vez evaluadas las posibilidades, y teniendo en cuenta las restricciones del peso de la prótesis, se consideraron materiales como duraluminio y aluminio; además, se incluyó acero inoxidable para el diseño de las partes metálicas y teflón de alta resistencia para los rodamientos. Se seleccionaron motores DC con 12 V. El tiempo de operación de la prótesis diariamente requerida es de 8 horas, debido a la autonomía que demanda el paciente para la realización de sus actividades y porque las baterías por lo general no duran un mayor tiempo; en este caso la batería alimenta dos motores, tanto el de la pinza como el del rotador.
Diseño conceptual y preliminar
Las alternativas previas a la toma de decisiones de los sistemas a diseñar se mencionan a continuación:
Sistema de transmisión de potencia
Se tienen tres posibilidades que darían una solución potencial del problema.
-Sinfín corona
-Reductor - levas
-Planetarios - sinfín corona
Se selecciona un tren paralelo y un mecanismo de sinfín corona debido a que este último ofrece autobloqueo y es posible compensar las pérdidas de potencia del sinfín con el aumento del torque en el reductor (tren de engranajes), además de tener una manufactura relativamente simple, ya que son piezas que se pueden fabricar por procesos convencionales. Permite una alta reducción de velocidad, que es una característica importante particularmente para los motores que se consiguen en el mercado nacional, además de ser el sistema mayormente utilizado en la transmisión de potencia de las prótesis, lo cual corrobora que, por lo pronto, es el más apropiado.
Estructura de la pinza
Se tienen tres alternativas que podrían ser la solución potencial del problema (Sánchez et al., 2003).
-Sinfín corona con dedos de pinza unidos directamente
-Levas con seguidores unidos a los dedos de la pinza
-Sinfín corona que acciona mecanismo de barras
Para la pinza tridigital se escogió el sistema de cuatro barras (Figura 4) debido a que es simple, además de permitir ubicar los ángulos óptimos para incrementar la fuerza de prensión. Aunque tiene mayor número de piezas que otras opciones, se puede fabricar fácilmente porque su geometría no es compleja.
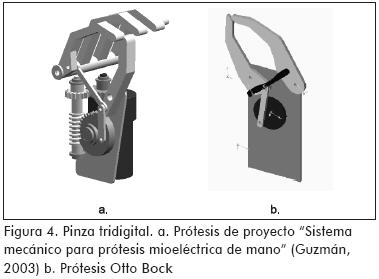
Una vez establecida la geometría de los dedos y los elementos mecánicos de transmisión de potencia asociados, usando un modelo de prótesis de una casa comercial (Otto Bock), se dibujaron las piezas en Solid Works, y a partir del módulo de Dinamic Designer se realizaron simulaciones de apertura y cierre de la pinza con el fin de establecer: gasto energético, requerimientos de potencia y cinemática de las partes.
Estos resultados se utilizaron para establecer, haciendo cambios geométricos de la disposición de los apoyos de la prótesis, una mejora en el sistema, disminuyendo el consumo de potencia para optimizar la pinza que ya estaba diseñada, logrando disminuir el consumo de potencia de la prótesis en alrededor de tres vatios.
Los materiales utilizados en la producción del prototipo por diseño se muestran en la Tabla 4
Estructura del rotador
Se proponen tres alternativas para el diseño del rotador, que podrían ser la solución potencial del problema.
-Sistema sinfín corona
-Engranaje corona con motor excéntrico
-Sistema de planetarios con salida de motor central
Finalmente, para el rotador, se selecciona el sistema planetario debido a que ofrece una configuración sencilla, tiene menos pérdidas de potencia que en el sinfín corona y ofrece posibilidades de manufactura relativamente simples. Debido al espacio que se tiene para el rotador, el cual debe igualmente cumplir con las características antropométricas, es más conveniente que el sinfín corona, ya que se obtienen buenos resultados de potencia y velocidad en un espacio reducido.
Siguiendo el mismo procedimiento llevado a cabo con la pinza, para el rotador se hicieron simulaciones con Dinamic Designer para establecer los requerimientos de potencia del mismo, y se procedió en ambos casos a realizar el cálculo de los elementos de máquinas, generando así el diseño de los dos módulos.
En la selección de los materiales para manufacturar los prototipos se busca baja densidad pero buena resistencia mecánica.
Los materiales de diseño utilizados para el rotador son los siguientes:
Diseño de detalle (Sánchez et al., 2003)
Para el cálculo de la mayoría de los elementos de la pinza, se utilizaron los módulos de diseño de un programa de sólidos (Solid Edge), mientras para el rotador se realizaron los cálculos valiéndose de métodos convencionales (Norton, 1995).
Una vez realizados los cálculos de diseño correspondientes, las características del producto final fueron las siguientes:
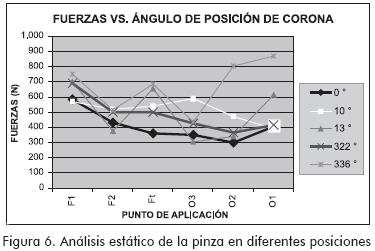
En el proceso de cálculo en el caso de la pinza se estableció que la posición donde sufre mayores esfuerzos es en la apertura media (a 36 grados de giro de la corona). Las posiciones y fuerzas encontradas se relacionan en la Tabla 6. La relación de fuerza vs. las posiciones y el prototipo de la pinza tridigital se muestra en la Figura 6.
Para la pinza
Dimensiones generales
El prototipo de Pinza Tridigital se puede ver en la figura 7.

Para el rotador
Dimensiones generales

La mayoría de las piezas del prototipo de la pinza se fabricaron por hidrocorte. Para el rotador se hicieron por mecanizado convencional. Los engranajes para el rotador, por tener un módulo muy pequeño, no se pudieron realizar por mecanizado convencional, razón por la cual fue necesario hacerlo mediante el proceso de electroerosión por hilo, proceso que nos fue facilitado por la empresa Ortomac S.A.
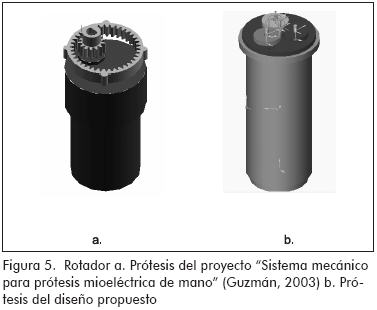
Así mismo, la apariencia del prototipo de rotador diseñado es la siguiente:
Conclusiones
El trabajo previo a la elaboración del prototipo, la recopilación bibliográfica y los procesos de conceptualización del producto, así como los diseños conceptual y preliminar, son de gran importancia y toman gran cantidad de tiempo y esfuerzo por parte del equipo de diseño.
Tras el trabajo realizado se pudo observar la importancia de vincular personal multidiciplinario (médicos e Ingenieros) y la voz del profesional de la salud en el proceso de desarrollo de un producto de aplicación en rehabilitación física.
En este trabajo se obtuvo un avance en el análisis dinámico de la pinza tridigital en conjunto, ya que no se encontró después del levantamiento bibliográfico en el momento de ser realizado el trabajo, análisis cinemático ni cinético para este producto biomecánico como se consiguen para prótesis de pie y simulaciones de marcha bípeda.
Agradecimientos
A la empresa Ortomac S.A. por el servicio que prestaron en el corte de los engranajes del rotador, como aporte voluntario a esta investigación.
Al ingeniero Miguel Ángel Vega, por su colaboración en la solución de problemas de diseño mecánico; al M.D. Octavio Silva, por sus orientaciones en la parte de rehabilitación médica.
A los magísteres en ingeniería de materiales y proceso MSc. Ing. Erika Olaya, por su colaboración en el logro de la calidad y el manejo del programa QFD Capture; al MSc. ing. Fernando Pacheco, por sus sugerencias en cuanto a los procesos de manufactura del prototipo y por su colaboración en el proceso de ensamble.
Bibliografía
AKAO, Y., Despliegue de la función calidad: integración de las necesidades del usuario en el diseño del producto., Japón, 1990. [ Links ]
ALONSO, A.; HORNERO SÁNCHEZ, R.; ESPINO HURTADO, P. Entrenador mioeléctrico de prótesis para amputados de brazo y mano, Mapfre Medicina, Vol. 13, No. 1, 2002, pp. 11-19. [ Links ]
CORTÉS, L.; y NIÑO L., Diseño de prótesis de miembro superior. 1ª. Parte, estudio funcional del miembro superior, proyecto de grado, Universidad Nacional de Colombia, para optar por el título de ingeniero mecánico, Bogotá, 1997. [ Links ]
DARIO, P.; CARROZZA, M. C.; MICERA S.; MASSA B. and ZECCA Mitech, M. The Development of a Novel Biomechatronic Hand, Scuola Superiore SantAnna Lecture Notes in Control and Information Sciences, Vol. 271, Experimental Robotics VII, 2000, pp. 159-168. [ Links ]
DE VINCENZO, C. V.: DA CUNHA, F. L.: SCHNEEBELI, H. A.; BASTOS, T. F.; and DYNNIKOV V. I. Agent-Based Control Of A Multifunction Mioelectric Prosthesis, Federal University of Espirito Santo Annual EMBS International Conference, Chicago IL, 2000. [ Links ]
FRANCA, E.M.; ORTOLAN, R.L.; and Cunha, F. L.; DYNNIKOV, V.I.; CLIQUET Jr. Specific Control System for an Anthropomorphic Myoelectric Hand Prosthesis, In: J.M. Baltazar; P.B. Gonçalves; R.M.F.L.R.F. Brasil; I.L. CALADAS; F.B. RIZATTO. (Org.), Nonlinear Dynamics, Chaos, Control and Their Applications to Engineering Sciences, Applications of Nonlinear Phenomena. Rio de Janeiro: ABCM, v. 6, 2002, pp. 356-365. [ Links ]
GUZMÁN, D., Sistema mecánico para prótesis mioeléctrica de mano, Informe Técnico, perteneciente al GIBM- UNCB, 2003. [ Links ]
NARDIN, Frankel, Biomechanics Of The Musculoskeletal System, 3rd Edition, Lippincott Williams And Willkins, 2001. [ Links ]
NORTON, Robert., Diseño de máquinas, Ed. Prentice Hall, 1995. [ Links ]
OLAYA, E. S. Despliegue de función de calidad (QFD) Apoyado mediante lógica difusa para requerimientos de diseño de prótesis mioeléctrica de mano, tesis de maestría presentada a la Universidad Nacional de Colombia, Bogotá, para optar por el título de magíster en ingeniería – Materiales y Procesos, 2003. [ Links ]
SÁNCHEZ, C. M.; LOAIZA, J. L.; GUEVARA, I.; CORTÉS C. J. y Silva, O. Rediseño y construcción de prototipo de pinza y rotador para prótesis mioeléctrica de mano, Grupo de investigación en Biomecánica (GIBM – UNCB), Informe técnico de Proyecto presentado al Departamento de Ingeniería Mecánica y Mecatrónica, Universidad Nacional de Colombia, Bogotá, para la asignatura de diseño de máquinas, 2003. [ Links ]
SCHULZ, S.; PYLATIUK, C. and Bretthauer, G. A New Ultralight Anthropomorphic Hand, Institute Of Applied Computer Science Research Center Of Karlsruhe, Germany, 2001. [ Links ]
INTERNET
http://www.oandp.org/jpo/library/
http://www.amputee-coalition.org/
http://www.armdynamics.com/spanish/
http://www.comunicacion.buap.mx/gaceta/2003/gct61/pag_20.htm

