










Servicios Personalizados
Revista
Articulo
 texto en
texto en  Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkIngeniería e Investigación
versión impresa ISSN 0120-5609
Ing. Investig. v.30 n.3 Bogotá sep./dic. 2010
Fredy Edimer Hoyos Velasco1 , Camilo Younes Velosa2 , Eduardo Antonio Cano Plata3 y Sebastián Sánchez Aristizábal4
1 Ingeniero electricista. M.Sc., en Ingeniería Automatización Industrial, Universidad Nacional de Colombia. Estudiante de Ph.D., en Ingeniería Línea – Automática, Universidad Nacional de Colombia, Manizales, Colombia. Miembro del Grupo de investigación PCI, fehoyosv@unal.edu.co.
2 Ph.D., en Ingeniería Electríca, Universidad Nacional de Colombia. Profesor Asociado, Universidad Nacional de Colombia, Manizales, Colombia. Miembro del grupo de investigación GREDyP , cyounesv@unal.edu.co.
3 Ph. D., en Ingeniería, Universidad de Buenos Aires, Argentina. Profesor Asociado Universidad Nacional de Colombia, Manizales, Colombia. Miembro del grupo de investigación GREDyP , ecano@ieee.org.
4 Ingeniero Electrónico, Universidad Nacional de Colombia. sebassanchez00@yahoo.es
RESUMEN
Prácticamente todo desarrollo de ingeniería sobre sistemas de control suele ser analizado mediante simulación para prever su desempeño. Sin embargo, no se debe dejar de tener en cuenta que el destino final del algoritmo será su aplicación en un sistema de tiempo real. Utilizando como herramientas de desarrollo una placa con tecnología DSP y el Simulink con RTW, se pueden realizar simulaciones en tiempo real (es decir, la simulación interactúa con la planta física). Para poder apreciar las considerables ventajas que brindan estas herramientas se ha planteado ensayar un lazo de control de velocidad a un motor de corriente continua de imanes permanentes.
Palabras clave: convertidor buck, DSP, motor DC de imán permanente, control, histéresis, prototipo rápido de control (RCP).
ABSTRACT
Virtually every engineering development for control systems is tested by simulation to predict performance. However, the final use of an algorithm is in its application in a real time system. Development tools using a DSP and Simulink RTW can be performed with real-time simulations (i.e. simulation interacting with physical plant). Testing the speed control loop of a DC motor with permanent magnets has thus been developed to appreciate the considerable advantages offered by these tools.
Keywords: buck converter, DSP, permanent magnet DC motor, controller, hysteresis, rapid control prototyping (RCP).
Recibido: junio 24 de 2009
Aceptado: noviembre 15 de 2010
Introducción
El objetivo de este documento es mostrar las ventajas que se tienen al trabajar con herramientas de desarrollo basadas en tecnología DSP (Digital Signal Processor). Entre ellas se encuentran: potencialidad, gran eficiencia y versatilidad para el desarrollo de modernas técnicas de control. Su alto desempeño permite hacer simulaciones en tiempo real, así como ensayar los algoritmos de control directamente sobre el equipamiento (Rossi, Cano et al., 2004).
Esta tecnología plantea un campo fértil para resolver el control de máquinas, donde los algoritmos de las estrategias de comando se plantean en lenguajes de alto nivel y son alojados y ejecutados en tiempo real en la placa. En aquellos accionamientos en los que era necesario controlar la velocidad con cierta precisión o se requería una buena respuesta dinámica, se utilizaban máquinas de corriente continua, a pesar de sus mayores inconvenientes (por ejemplo, requerir continuo mantenimiento).
La evolución de la tecnología de los dispositivos de potencia y el desarrollo de sistemas de control digital de gran potencia computacional (construidos con tecnología DSP) permite producir controladores que compitan tanto en costo como en desempeño con los controladores de los motores de corriente continua. Utilizando como herramientas de desarrollo una placa con tecnología DSP y el RTW (Real Time Workshop) de Matlab (Dspace, 2008; Mathworks, 2010) es posible establecer dos enfoques para ensayar estrategias de control. Uno de ellos se conoce como simulación HIL (Hardware In the Loop) y consiste en utilizar la placa para alojar los algoritmos que simulen en tiempo real el comportamiento de la planta, mientras que el controlador a ensayar es un prototipo físico (circuito real).
El otro se conoce como simulación RCP (Rapid Control Prototyping), consistente en utilizar la placa para alojar los algoritmos que simulen en tiempo real el comportamiento del controlador a ensayar, mientras que la planta es un sistema real. En este trabajo se optó por el enfoque que se plantea en la simulación RCP, utilizando como controlador a probar un lazo de control de velocidad para un motor de corriente continua de imán permanente. En cuanto a la estrategia de control, se utilizó el control por lazo de histéresis (Hoyos, Taborda et al., 2007).
En primera instancia, se modelaron y simularon (en tiempo de simulación) en Simulink (Mathworks, 2010) cada una de las etapas que conforman el control de velocidad (controlador y planta). Luego, se reemplazaron los modelos del motor de imán permanente y del inversor de tensión por los componentes físicos reales para poder observar el comportamiento del controlador en tiempo real a partir del controlador RCP.
Las herramientas de desarrollo utilizadas en este trabajo son:
• Placa DSP (Digital Signal Processor) de desarrollo: Placa dSPACE modelo DS1104.
• Interfaz hombre máquina: ControlDesk, provisto por dSPACE. Simuladores: Matlab 7.1 con Real Time Workshop y Simulink.
En cuanto a la planta, se utilizó un motor de corriente continua de imán permanente de 1/4 Hp de Motorsolver; el filtro LC tiene valores de 2.076 mH y 28,56 uF, respectivamente.
Modelo implementado del sistema
El convertidor a usar es uno de transferencia directa que a la vez es reductor, denominado convertidor Buck; para describir el modelo se considera la estructura que se muestra en la Figura 1; en ella, la fuente de alimentación simplifica la operación del convertidor, mostrando que puede tomar un valor positivo o negativo; el signo lo impone la variable u y la magnitud la representa la letra E. Será positivo o negativo dependiendo de la acción de control. Como consecuencia de la actuación del controlador el sistema es de estructura variable, y se ve reflejado por el cambio de polaridad de la fuente de alimentación. El sistema se comporta de manera lineal en cada polaridad, conocido así como lineal a tramos (Angulo, 2004).
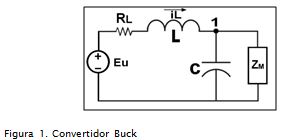
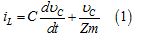
Aplicando la ley de corrientes de Kirchhoff en el nodo etiquetado con 1 de la Figura 1, se obtiene la ecuación (1):
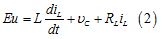
Tomando la tensión en la capacitancia y la corriente que pasa a través de la inductancia como las variables de estado, se encuentra la representación en el espacio de estados a partir de las ecuaciones (1) y (2), como se evidencia en la ecuación (3) (Taborda, 2006; Angulo, Olivar et al., 2008; Biel, Cardoner et al., 2006).
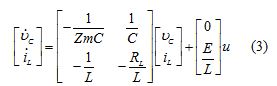
Resumiendo:
La señal de control u toma dos valores: +1 y -1; con ello se presentan dos topologías diferentes cuando hay conmutación.
Modelo en Simulink
A partir de las ecuaciones diferenciales que describen la dinámica del convertidor y de la dinámica suave a trozos que implica el cambio de topología, se desarrolló el modelo computacional del sistema en Simulink siguiendo el trabajo desarrollado en (Hoyos, 2009)
Descripción del montaje
El sistema está compuesto por el controlador que recibe dos señales, una de referencia y otra que presenta información acerca del estado en que se encuentra el convertidor Buck (Vc). En la Figura 7 se observa claramente el lazo de realimentación que va al controlador. Como se anotó, el sistema de control se implementó con una tarjeta DSP, la cual ofrece multitud de ventajas, tales como una respuesta rápida, facilidad de programación, versatilidad en sus funciones, entre otras características (Hoyos, Huertas et al., 2009).
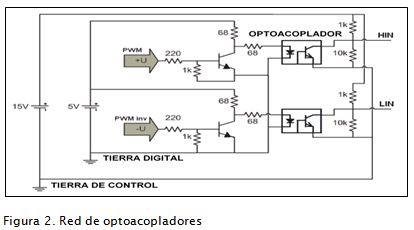
La Figura 2 muestra cómo el controlador transfiere su salida a una red de optoacopladores con fines de protección. Esto se realiza para proteger la tarjeta, además se aíslan las etapas de control y de potencia. A continuación, los optoacopladores pasan su señal a los drivers que sirven para polarizar los transistores de potencia Mosfet. Asimismo, los drivers pasan la señal al puente inversor.
El inversor es el mecanismo utilizado para alimentar al convertidor Buck, con valores +E o -E, dependiendo de la señal de control u. El convertidor Buck se puede ver como un filtro que suaviza la señal proveniente del inversor y disminuye al mínimo el rizado producto de la conmutación.
El convertidor transmite su tensión regulada a la carga, que para este caso es un motor DC de imán permanente y de esta manera controla su velocidad variando la tensión de armadura (V_motor).
De la salida del convertidor Buck se toma la tensión en la carga para llevar a cabo la tarea de la realimentación, esta señal debe ser acondicionada de tal forma que pueda ser leída por la tarjeta DSP, ya que si sus rangos de operación son superados, existe la posibilidad de deteriorarla. Consecuentemente, se debe hacer toda la instrumentación necesaria para realizar la adquisición de las señales. A continuación se describirán detalladamente los diferentes bloques del diagrama de flujo.
Protección con optoacopladores
Dado que las salidas que se obtienen con el DSP están referenciadas con el PC, es necesario desacoplar esta parte digital de la parte de potencia. Para ello se usa una red con optoacopladores J312, como se muestra en la Figura 2.
El funcionamiento de esta etapa es el siguiente: la tarjeta DS1104 brinda por sus salidas digitales dos señales PWM encargadas de la acción de control que debe ser ejecutada en tiempo real, estas señales polarizan los transistores 2N2222 del esquema. Cuando los transistores son alimentados con un nivel de tensión alto (5V) entran en estado de saturación, lo que implica conducción de corriente a través de ellos, esto hace que la corriente se desvíe de la fuente a tierra sin que pase por el optoacoplador. Cuando los transistores son alimentados con niveles de tensión bajo (0V) entran en estado de corte, aquí el transistor no conduce y la corriente alimenta el optoacoplador.
Estas redes de transistores se comportan como negadoras lógicas, es así que para niveles de entrada altos se tienen niveles de salida bajos y viceversa. Las salidas de los optoacopladores tienen niveles lógicos altos y bajos dados por las tensiones 13,6V y 0V, respectivamente.
Drivers
Después de aislar los dispositivos digitales de los de potencia, el siguiente paso es operar el driver IR2110. El driver acondiciona la señal para ser entregada finalmente a los elementos conmutadores del puente medio, que son los transistores de potencia Mosfet. El IR2110 es el adecuado para esta aplicación de control, que requiere rápida velocidad de conmutación, y además es capaz de aislar las dos señales provenientes de los optoacopladores de tal forma que se puedan conmutar los transistores de potencia.
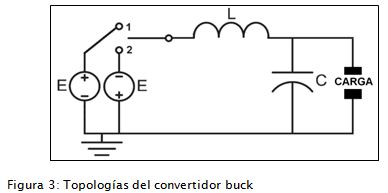
Buck-boost
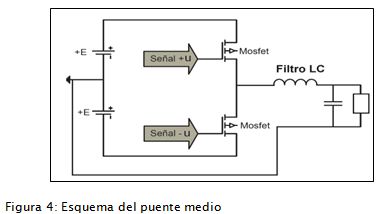
El puente medio o buck–boost es el hardware que permite cambiar la polaridad de alimentación de acuerdo a una señal de control. La Figura 3 muestra un convertidor buck al que se le cambia la polaridad de alimentación. Este tipo de estructura con puente medio difiere de la estructura buck convencional y con esto se evita que la corriente del inductor sea cero en algún instante por lo que no se tiene el modo de conducción discontinua. En Hoyos (2009); Angulo, Hoyos et al., 2008) se propone un puente medio para realizar esta tarea. En nuestro caso también se usa esta topología con transistores de potencia Mosfet canal N, como se señala en la Figura 4.
Convertidor buck
En la Figura 5 se registra el modelo usado, el cual es un filtro LC. En esta etapa se obtiene la señal modulada, que es aquella que el usuario desea a la salida para su carga. Como sabemos, al filtro le llegan señales portadoras en formato PWM de alta frecuencia, y gracias a la combinación LC se pueden obtener señales AC y DC reguladas a la salida.
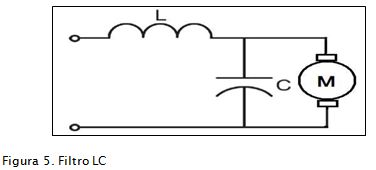
El puente medio se utiliza para alimentar el convertidor buck con las tensiones +E y -E. En la polaridad positiva la razón de cambio de la corriente es positiva, y en la otra polaridad es negativa. La tensión de salida del convertidor es la misma tensión entregada al condensador y al motor DC, como se muestra en la Figura 5.
Sensado y acondicionamiento de señales
El acondicionamiento de las señales se hizo como se aprecia en la Figura 6. En ella se puede apreciar que para el sensado de tensión se usó un sensor resistivo con resistores de valor grande para no perturbar la señal real, y para la corriente se utilizó un resistor de valor 1 Ohm para leer su caída de tensión.
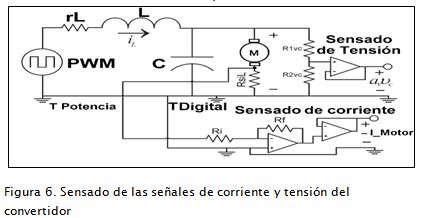
Con el fin de suprimir el ruido presente debido a la conmutación, se ajustó la señal de manera adecuada usando el método descrito en (Hoyos, Cano et al., 2009; Hoyos, Younes et al., 2010). La señal de corriente también se amplificó con un factor dado por la ecuación 5, puesto que es muy pequeña. Las señales de tensión y corriente son llevadas mediante cable apantallado a las entradas ADCHx de la tarjeta.

Controlador
Se implementó con la tarjeta dSPACE DS1104; esta tarjeta mejora el PC para desarrollar sistemas en un prototipo rápido de control. Sus interfaces de entrada y salida la hacen ideal para desarrollos de control muy variados.
La tarjeta internamente está dividida en bloques funcionales que la tornan útil para control y procesamiento en tiempo real. La tarjeta tiene conversores análogos-digitales y digitales-análogos para facilitar la comunicación con el exterior, lo que también permite la adquisición de datos en tiempo real. Estos conversores internos facilitan la tarea de instrumentación del circuito, ya que no es necesario implementar esa etapa. Debe procurarse nunca exceder los valores máximos de tensión permitidos en los terminales de entrada de la tarjeta.
La Figura 7 muestra en diagrama de bloques el algoritmo implementado en tiempo real en la DSP
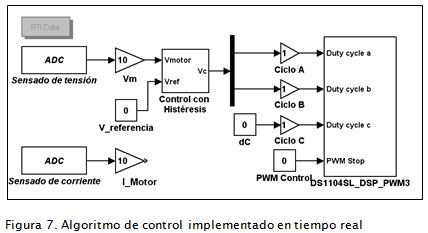
En primera medida se adquieren las variables de estado, que son la tensión en el condensador (tensión en el motor Vc) y corriente en el motor. En esta misma etapa se procesan esas señales de manera tal que coincidan las unidades de medida, además se adecúan para que las señales se puedan visualizar en gráficas. Luego de la validación de las entradas se procede a calcular la acción de control con histéresis cero. Para eso es necesario tener información sobre el estado de la salida de la planta que se controla y de la referencia que el usuario ha determinado.
Controlador de Histéresis
El control con histéresis tiene la principal ventaja de ser un control simple y extremadamente rápido, y para su implementación en tiempo real se usó la ecuación (6). Funciona correctamente en sistemas simples que admiten pequeñas oscilaciones. El control con histéresis parte de la necesidad de disminuir las frecuencias de conmutación de elementos electromecánicos para evitar su deterioro y alargar la vida útil de estos elementos.
Resultados
Los datos que caracterizan el motor de imán permanente usados para el experimento son: potencia 250 W, tensión nominal de 42 VDC, corriente nominal 6 ADC, velocidad máxima de 4.000 VRMS, resistencia de 0,6 ohms. Los valores de filtro LC son, respectivamente, 2.076 mH y 28,56 uF.
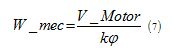
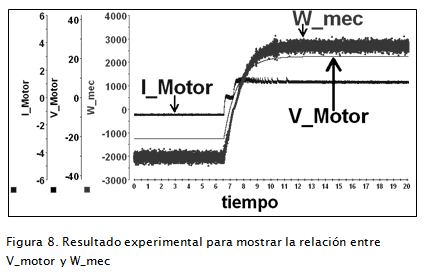
Téngase en cuenta que la velocidad del motor DC de imán permanente es directamente proporcional a la tensión de armadura aplicado, como lo muestran las ecuaciones (6) y (7), donde los parámetros del denominador son constantes pues dependen de los parámetros de construcción de la máquina y el flujo de excitación externa dado por los imanes permanentes. En la Figura 8 se ofrecen resultados experimentales obtenidos de aplicar el controlador con histéresis cero al motor usando la ecuación (6). En ésta se puede ver que al alimentar el motor con una tensión negativa de -20V la velocidad es de aproximadamente -2.000 RPM, y cuando la tensión es de 20V la velocidad es de 2.500 RPM; también se puede ver el transitorio de corriente.
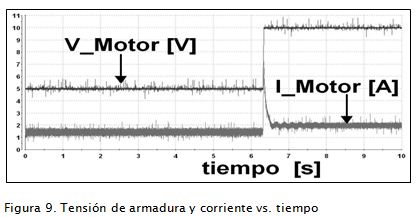
En la Figura 9 se varía instantáneamente el valor de la tensión de armadura a la salida del convertidor desde un valor de 5 V hasta otro valor de 10 V, y se mide la respuesta en corriente. En primera medida, se observa el ruido presente en la corriente. Este ruido se debe principalmente al ruido introducido en el hardware EMI debido a la conmutación de los transistores y errores en la medición.
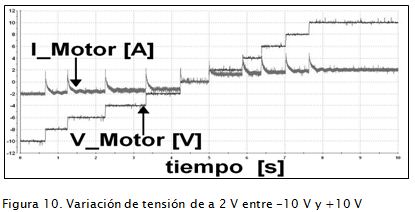
En la Figura 10 se realizan cambios instantáneos de tensión de alimentación de a 2 voltios entre el rango de -10 V hasta 10 V.
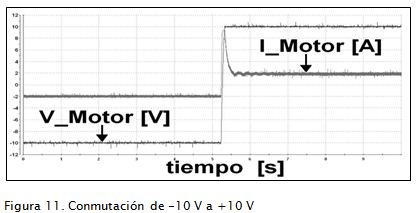
En la Figura 11 se hace la variación de tensión de manera más abrupta, cambiando de -10 V a 10 V. Por consiguiente, el pico de corriente tiene un valor mucho más pronunciado, hasta el punto de producir la saturación en los componentes de alimentación que no pueden suplir la corriente exigida por el sistema. Esta saturación se puede observar en la gráfica como el recorte que tiene el pico de corriente. A medida que pasa el tiempo el valor de corriente se va amortiguando rápidamente, hasta alcanzar un valor estable y proporcional a la tensión; todo esto sucede aproximadamente en 1 segundo.
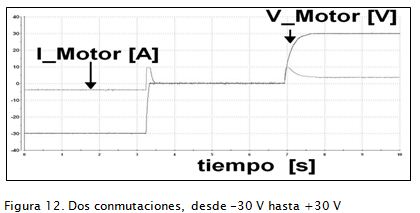
En la Figura 12 se presentan cambios abruptos en la tensión de alimentación, variando cerca a los límites de la tensión de alimentación. Se infiere de la gráfica el hecho de que la respuesta en la tensión tarda más tiempo en alcanzar la referencia 30 V. También se observa la saturación prolongada en la corriente. Al final ambas señales, de tensión y de corriente, se estabilizan. Como las señales son de mayor magnitud que las primeras analizadas, los efectos del ruido son menos notorios.
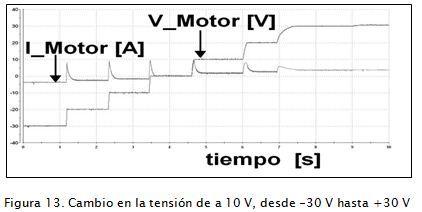
Finalmente, se varía la tensión de a 10 V, desde -30 V hasta +30 V. No se exhiben comportamientos distintos a los ya observados excepto al final, cuando las señales de tensión y corriente pierden un poco más la regulación.
Conclusiones
El sistema con histéresis para controlar el motor DC implementado en la tarjeta DSP presenta buen rendimiento.
Se ha hecho una incursión importante en la metodología RCP para el desarrollo rápido de controladores, y los resultados obtenidos a partir de los ensayos realizados sobre el controlador RCP han dejado en evidencia su eficiencia.
Las herramientas de desarrollo utilizadas (placa dSPACE y Matlab) posibilitaron la realización de simulaciones en tiempo real. Esto representó un importante avance con respecto a la simulación tradicional, ya que la simulación interactuó con la planta física.
Trabajando sobre el modelo en bloques en Simulink fue muy fácil introducir modificaciones y mejoras en el proceso de diseño del sistema de control. Esto da idea de que se pueden lograr desarrollos en tiempos mucho menores que con las metodologías habituales, en las que los cambios mencionados hubieran implicado cambios de programas y circuitos (con la complicación que esto acarrea). Se evidencia así la reducción de costos de desarrollo que se puede lograr.
Agradecimientos
A la Dirección de Investigación de Manizales (DIMA), a la Universidad Nacional de Colombia y al programa Jóvenes Investigadores e Innovadores de Colciencias, por su apoyo económico-financiero.
Bibliografía
Angulo, F., Análisis de la dínámica de convertidores electrónicos de potencia usando PWM basado en promediado cero de la dinámica del error (ZAD)., Tesis Doctoral, Universidad Politécnica de Cataluña, España., Mayo 2004. [ Links ]
Angulo, F., Hoyos, F., Taborda, J., Hoyos, F., Olivart, G., Nonsmooth dynamics and FPIC chaos control in a dc-dc ZAD-strategy power converter., ENOC-2008, Vol. 55, pp:2392-2401., Saint Petersburg, Russia., 2008. [ Links ]
Dspace., ControlDesk experiment guide for ControlDesk 3.3 release 6.3., November 2008. [ Links ]
Hoyos, F., Desarrollo de software y hardware para manejo de un convertidor dc-dc y dc-ac controlado con ZAD y FPIC. Tesis de Maestría., Universidad Nacional de Colombia - Sede Manizales., Colombia., Julio 2009. [ Links ]
Hoyos, F., Cano, E., Younes, C., Reducción de IEM en convertidores Electrónicos de potencia., V Simposio Internacional sobre Calidad de la Energía Eléctrica SICEL 2009, Bogotá, Colombia 2009. [ Links ]
Hoyos, F., Huertas, D., Hoyos, A., Convertidor buck buck-boost controladodigitalmente con histeresis cero medianteun DSP., Aplicaciones Industriales., Revista Energética, Vol XXX, pp: 20-25., La Habana Cuba. 2009. [ Links ]
Hoyos, F, Taborda, J, Hoyos, C, Gonzales, E., Diseño e Implementación de un Inversor Monofásico Usando una Topología Buck., IV Simposio Internacional Sobre Calidad de La Energía Eléctrica., Manizales Colombia., 2007. [ Links ]
Hoyos, F., Younes, C., Cano, E., Técnicas de filtrado de IEM en convertidores electrónicos de potencia., Ingeniería e Investigación Vol. 30, No. 2, Agosto 2010, pp. 168-177. [ Links ]
Mathworks., Simulink, User's guide., 2010. [ Links ]
Mathworks., Real Time Workshop for use with Simulink, User's guide., (2010). [ Links ]
Rossi, P., Cano, E., Bruno. M., Godfrid, C., Desarrollo de un controlador de velocidad de un motor de inducción utilizando técnicas de realización rápida de prototipos., XIX Congreso Argentino de Control Automático, AADECA., 2004. [ Links ]

