










Services on Demand
Journal
Article
 text in
text in  Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería e Investigación
Print version ISSN 0120-5609
Ing. Investig. vol.31 no.2 Bogotá May/Aug. 2011
Métodos para generar trayectorias libres de colisiones en entornos multidimensionales
Collision-free path planning in multi-dimensional environments
Edwin Francis Cárdenas1, Luis Miguel Mendez2, Jorge Sofrony Esmeral3
1 Ingeniero Electromecánico, M.Sc., Universidad Nacional de Colombia, Colombia. ecardenasc@unal.edu.co
2 Ingeniero Mecánico, M.Sc., Profesor asistente, Universidad Nacional de Colombia. lmmendezm@unal.ecu.co
3 Ingeniero Eléctrico, Ph.D., Profesor asistente, Universidad Nacional de Colombia. jsofronye@unal.edu.co
RESUMEN
Planear los movimientos de un robot de forma fiable sin que colisione con su entorno se ha convertido en un problema relevante en la última década. La idea central de este artículo es exponer dos de los principales métodos que permiten generar trayectorias libre de colisiones en cualquier espacio n-dimensional. La importancia de conocer estas estrategias radica en que estos mismos algoritmos se han aplicado en áreas distintas a la robótica, como diseño de medicamentos, animación computarizada e inteligencia artificial. También presentamos un referente histórico de varios métodos de generación de trayectorias y mostramos mediante simulaciones como las estrategias de los campos potenciales artificiales y de los mapas probabilísticos funcionan, siendo los más apropiados en virtud de los aspectos teóricos expresados en otros textos especializados.
Palabras clave: robótica, generación de trayectorias, evasión de obstáculos, sistemas multidimensionales.
ABSTRACT
Reliable path-planning and generation of collision-free trajectories has become an area of active research over the past decade where the field robotics has probably been the most active area. This paper's main objective is to analyse the advantages and disadvantages of two of the most popular techniques used in collision-free trajectory generation in n-dimensional spaces. The importance of analysing such techniques within a generalised framework is evident as path-planning is used in a variety of fields such as designing medical drugs, computer animation and artificial intelligence and, of course, robotics. The review provided in this paper starts by drawing a historical map of path-planning and the techniques used in its early stages. The main concepts involved in artificial potential fields and probabilistic roadmaps will be addressed as these are the most influential methods and have been widely used in specialised literature.
Keywords: robotics, path planning, obstacle avoidance.
Recibido: Octubre 2 de 2009
Aceptado: noviembre 4 de 2010
Introducción
En las décadas de los ochenta y noventa la popularidad de los robots y sus múltiples usos en la industria hicieron que los investigadores y programadores se dedicaran a resolver el problema de concebir trayectorias libres de colisiones entre los robots y su entorno (Goldman, 1990). Una de las metas de la robótica es desarrollar sistemas autónomos, y lo que para el hombre parece fácil e intuitivo, desplazarse de un sitio a otro o manipular objetos, no es una labor tan sencilla para las máquinas.
Una primera aproximación a los métodos de planificación de caminos fue realizada por Lozano-Pérez (Lozano, 1981). Una década después se dio la aparición del libro de Jean-Claude Latombe (Latombe, 1991), y desde ese entonces un buen número de publicaciones y artículos han abordado el tema de generación de trayectorias sin colisiones, pero pocos libros como el de Howie Choset (Choset, 2005), han cerrado la brecha entre los conceptos fundamentales y los recientes progresos teóricos y prácticos.
El advenimiento de mayores velocidades en el procesamiento computacional ha permitido que estos métodos de planificación de caminos hagan parte de innovadoras aplicaciones prácticas, como es el caso de la cirugía robotizada (Sim, 2001; Goo, 2005), la animación en 3D (Kuffner, 1998; Wenhu, 2007), películas con actores virtuales, el desarrollo de videojuegos (Funge, 2004), el uso de robots asistentes en museos y hospitales (Maio, 1995), en la química realizando el modelamiento de cadenas moleculares (Kirillova, 2008) y en la exploración de otros mundos empleando robots móviles (Bresina, 2005; Carsten, 2009).
Existen varios métodos de origen geométrico para resolver el problema básico de planeamiento de caminos, y desde Latombe (1991) se han destacado tres métodos: campos potenciales artificiale (Potential Functions), mapas de carreteras (Roadmaps) y descomposición de celdas (Cell Decompositions). En la última década se ha desarrollado una nueva metodología denominada mapas probabilísticos (Probabilistic Roadmaps) (Choset, 2005), debido a que en entornos complejos, con un elevado número de grados de libertad o restricciones cinemáticas, los métodos geométricos pueden presentar limitaciones en cuanto al tiempo de cómputo necesario y el éxito en la generación de trayectorias.
Los algoritmos de generación de trayectorias requieren de la definición de espacio de trabajo (W) y espacio de configuración (Q). W es el entorno o lugar geométrico donde interactúa el robot en forma real con su entorno (espacio cartesiano); el espacio Q se define como el conjunto de todas las posibles configuraciones cinemáticas de un robot (Spong, 2006) y puede ser tratado como un espacio dimensional de orden dos, tres, cuatro, o n-dimensional.
La representación del espacio de configuración permite establecer al robot como punto dentro de un espacio n-dimensional, con lo cual se puede trazar una trayectoria continua libre de colisiones desde una configuración inicial (start) hasta una final (goal).
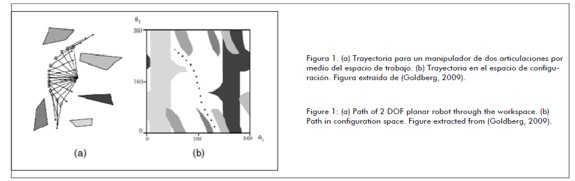
Para el caso de un robot planar articulado de dos grados de libertad (GDL), Q corresponde a los valores que toman cada una de las dos articulaciones del robot, donde Q ∈ R2 y la trayectoria se calcula en un espacio bidimensional (figura 1). Si un robot tiene 6 GDL, la búsqueda de una trayectoria sin colisiones se puede realizar dentro de Q ∈ R6.
Se dice que un objeto tiene n grados de libertad si su configuración puede ser especificada de forma mínima con n parámetros. Así pues, el número de GDL es igual a la dimensión de Q (Spong, 2006).
En las secciones 2 y 3 se exhiben los principios que rigen los dos principales métodos de generación de trayectorias (campos potenciales y mapas probabilísticos) dentro de entornos multidimensionales,esto debido a que la mayoría de estrategias tradicionales, como descomposición de celdas y Roadmaps se tornan imprácticas (Choset, 2005) y sólo asegurarían una trayectoria libre de colisiones para el efector final. Por último, se presentan las conclusiones y prospectivas en la sección 4.
Campos potenciales artificiales
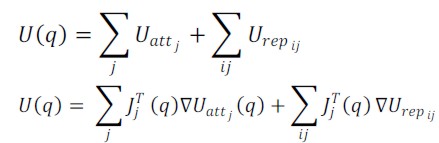
El método de campos potenciales fue descrito primero por (Khatib, 1985) para aplicaciones de evasión de colisiones de forma on-line usando robots móviles con sensores de proximidad. La filosofía de este método es concebir el robot como una partícula eléctrica que es atraída hacia su configuración final qgoal mediante un potencial atractivo Uatt, a la vez que es repelida por los obstáculos por medio de un potencial repulsivo propio Urep. El campo potencial resultante es la adición de estos dos componentes al incluir todos los obstáculos.
 | [1] |
Así, el movimiento de la partícula puede ser tratado como un problema de optimización donde existe un mínimo global qgoal, empezando desde una configuración qstart; este problema puede abordarse utilizando el método de descenso del gradiente.
Potencial atractivo
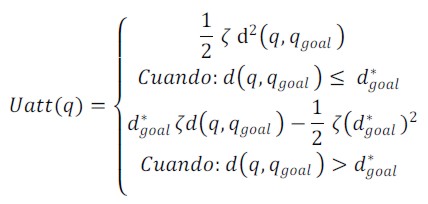
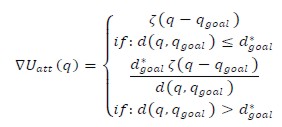
Existen varios criterios para seleccionar un campo potencial atractivo, sin embargo la definición de mayor aceptación es la de que Uatt incremente según la distancia desde qgoal, de acuerdo con la siguiente expresión:
 | [2] |
Se define d(q, qgoal) como la distancia euclidiana entre una configuración q y la configuración final qgoal; el parámetro ζ es usado para escalar el efecto atractivo del potencial. La fuerza atractiva se determina en dos partes: inicialmente la intensidad del campo varía linealmente con la distancia, al pasar el umbral d(q, qgoal) ≤ d* goal, la atracción pasa a ser de orden cuadrática para que la intensidad del campo disminuya paulatinamente, o sea, es como una partícula que es atraída hacia su configuración final de manera uniforme hasta cierto punto, donde para asegurar una llegada suave a la meta se debe reducir su velocidad.
Potencial repulsivo
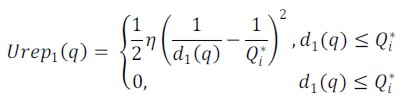
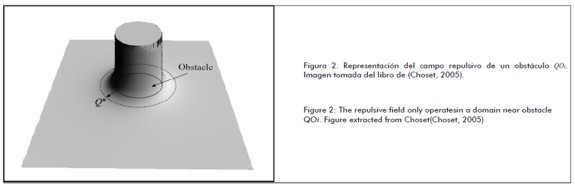
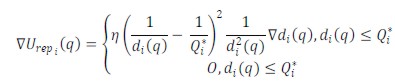
El objeto del potencial repulsivo es el de mantener a la partícula (robot como un punto en el Q) apartada de un obstáculo. La magnitud de la fuerza del campo debe aumentar con la proximidad al obstáculo. Por tanto, el potencial repulsivo es definido en términos de la distancia más corta di(q) que existe a un obstáculo dado QOi. Para evitar colisiones con el obstáculo QOi el campo potencial debe producir un efecto repulsivo asintótico sólo en las cercanías del obstáculo, por lo cual se puede definir el potencial repulsivo como:
 | [3] |
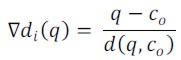
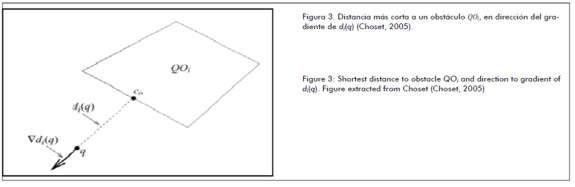
Q*i ∈ R es un umbral que permite al robot ignorar un obstáculo que se encuentra lo suficientemente lejos, y η· puede ser visto como la ganancia en el gradiente repulsivo. Estos escalares son generalmente determinados por ensayo y error. Una representació de este efecto repulsivo sobre un obstáculo circular se puede apreciar en la figura 2. La figura 3 muestra a di(q) medida desde co, que es el punto más cercano al obstáculo QOi, y cuyo gradiente es
 | [4] |
Un inconveniente de esta formulación es el de que el cálculo de la distancia mínima a un robot no siempre es evidente en W, por tanto una alternativa expuesta en algunos de los textos especializados es seleccionar un subconjunto de puntos pertenecientes al robot, denominados puntos de control (rj ) y luego se define un potencial Uj por cada uno de estos puntos. Con la determinación del efecto sobre todos los puntos de control se realiza un mapeo de las fuerzas actuantes desde el espacio de trabajo al espacio de configuración y posteriormente se calcula una sumatoria de fuerzas en Q para obtener el efecto combinado sobre todo el robot, el cual ahora sí puede ser representado como un punto.
Efecto combinado
En una situación en la que un robot esté formado por uno varios cuerpos sólidos, se pueden establecer varios puntos de control j, pero a la vez pueden existir uno o varios obstáculos i, de ahí que el campo potencial artificial resultante puede ser visto como:
 | [5] |
El término Jj (q) es la matriz jacobiana para cada punto de control rj. El análisis de jacobianos es estudiado en la teoría de robótica y permite enlazar los espacios de trabajo y configuración mediante la cinemática directa, tal como se encuentra en (Craig, 1989). Para cada punto de control las expresiones de gradiente de los campos potenciales atractivo y repulsivo j son calculadas de las expresiones (2) y (3), obteniendo:
 | [6] |
 | [7] |
Es razonable que exista mayor o igual cantidad de puntos de control que el número de grados de libertad. En el caso de un robot con articulaciones rotacionales los puntos de control pueden ser ubicados en los marcos de referencia articulares.
Una vez obtenido el efecto del campo potencial artificial sobre el robot en un momento dado, es necesario obtener la siguiente configuración; esto se puede lograr con el método de descenso del gradiente, método comúnmente utilizado para resolver problemas de optimización. Las direcciones de las fuerzas resultantes del campo potencial están dadas por las velocidades de descenso, “colina abajo”, hacia un estado mínimo.
La idea del algoritmo de descenso del gradiente es simple: se empieza desde una configuración inicial, luego se toma un pequeño paso en dirección del gradiente negativo, lo cual nos da como resultado una nueva configuración; este proceso se repite hasta que el gradiente sea cero. La definición de dicho algoritmo para la implementación en aplicaciones de campos potenciales se aprecia en la Figura 4.
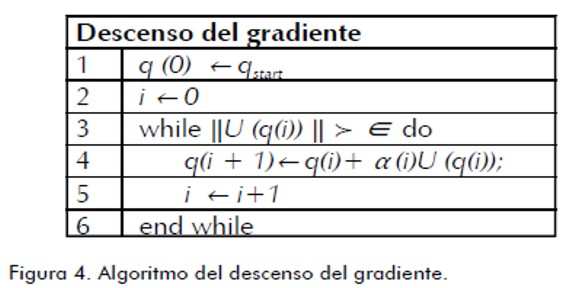
La variable q(i) es el valor de q en la i-ésima iteración; la solución consiste de una secuencia de configuraciones {q(0), q(1), q (2), …, q(i)}. El valor escalar α(i) debe ser lo suficientemente pequeño para que el robot no se salte obstáculos. Es improbable que el gradiente llegue a ser exactamente cero, por tal razón se establece la tolerancia como un valor suficientemente pequeño según los requerimientos de operación.
Ejemplos
Las figura 5 y 6 muestran la generación de trayectorias usando campos potenciales artificiales. El robot móvil rectangular de la figura 5(a) está en un W bidimensional, pero el Q es tridimensional, pues el robot es representado por la posición (x, y) del centroide y el ángulo θ¸ que indica la orientación; es decir, en cualquier instante el robot tiene una configuración q(x, y, θ¸). En W se eligen los puntos de control rj en los vértices del rectángulo. Usando el algoritmo del descenso del gradiente se calcularon iterativamente las distancias entre los rj actuales y los de la posición final para determinar el efecto atractivo, además se calculan las distancias mínimas entre cada rj y los diferentes obstáculos para determinar el efecto repulsivo total.
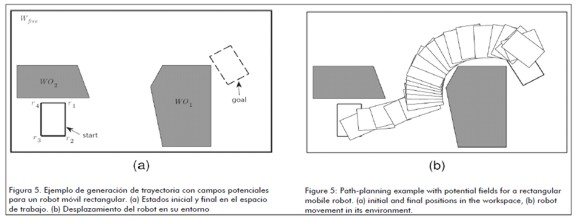
En cada iteración del algoritmo de descenso del gradiente se calcula el total del campo potencial y se obtiene por resultado una nueva configuración q del robot con el fin de utilizarse en la siguiente iteración. El parámetro α debe ser pequeño y ajustado manualmente para que la trayectoria generada permita la evasión de obstáculos, esto es, que el robot no pase por alto el obstáculo más pequeño requerido. La figura 5(b) exhibe varias posiciones intermedias que representan la trayectoria calculada para el robot rectangular. Es evidente que se requiere calcular varias veces el efecto repulsivo y atractivo para cada rj; si existen muchos obstáculos y muchos rj el proceso de cómputo emplea más tiempo, por tal razón esta estrategia de generación de trayectorias libres de colisiones es más apropiada para robots móviles con ejecución online y realimentación sensorial de distancias mínimas a los obstáculos. La ventaja del método radica en que se puede expandir fácilmente la metodología a entornos multidimensiones, por ejemplo, un robot aéreo podría tratarse en un espacio Q de seis dimensiones correspondientes a sus seis grados de libertad.
Con las simulaciones, dos efectos peculiares fueron detectados, el primero resulta en la presentación de vibraciones cuando el robot intenta sobrepasar un obstáculo, el cual está cerca a una situación de un mínimo local. Esto es debido a un paso α grande, lo cual es una consecuencia directa de la estrategia de descenso del gradiente. Segundo, el robot no llega exactamente a la posición de meta, pues el algoritmo de descenso del gradiente no acaba cuando U(q(i)) = 0. Para evitar efectos indeseados se sugiere realizar un posprocesamiento para afinar la trayectoria resultante.
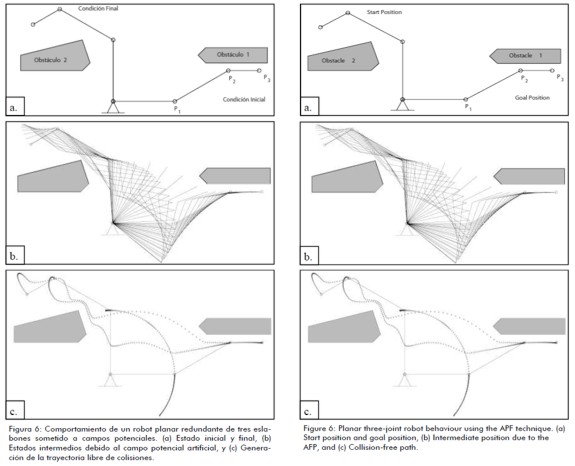
En el caso de un robot articulado la metodología que se aplica es la misma que se expuso, la diferencia radica en la ubicación de los puntos de control, que se pueden localizar en el efector final y en los ejes articulares, con la advertencia de agregar nuevos puntos de control en el cuerpo de los eslabones para evitar la inadvertencia de obstáculos debido a geometrías irregulares. Se puede controlar la agilidad de los algoritmos implementados restringiendo los efectos repulsivos en aquellas articulaciones de las cuales se sabe de antemano que nunca van a colisionar con ciertos obstáculos. En la figura 6 se presentan los resultados de aplicar el método de campos potenciales artificiales a un robot planar de tres eslabones y tres articulaciones rotacionales.
Las simulaciones con robots articulados redundantes han demostrado que aunque se presentan mínimos locales para un punto de control en particular, el efecto combinado del campo atractivo y repulsivo en los restantes puntos de control hace que se pueda escapar de esa condición de atascamiento, y aunque usualmente se requiere un número grande de iteraciones, al emplear un algoritmo de posprocesado se consigue afinar fácilmente la trayectoria resultante.
Mapas probabilísticos
Los mapas probabilísticos (PRM), desde sus inicios, han demostrado un tremendo potencial para solucionar el problema de encontrar una ruta libre de colisiones en entornos multidimensionales (Kavraki, 1996).
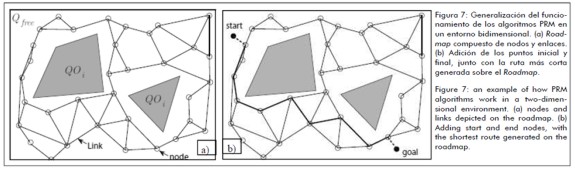
La idea central del PRM es distribuir un conjunto de puntos(nodos) de manera aleatoria en el espacio de configuración libre de colisiones, Qfree. Posteriormente, con un “planificador local”, se establecen las conexiones (enlaces) entre nodos y se descartan aquellas que produzcan colisión dentro de W . Al conjunto de nodos y enlaces se le denomina Roadmap. La configuración inicial qstart se agrega al Roadmap mediante un enlace libre de colisiones hasta el nodo más cercano; se hace lo mismo con qgoal. Luego se traza una trayectoria entre qstart y qgoal utilizando algoritmos como A o el algoritmo de Dijkstra, con la finalidad de encontrar la ruta más corta desde qstart a qgoal (figura 7). Un enlace entre nodos es una línea recta compuesta por puntos, que representan una sucesión de configuraciones del robot en el espacio de trabajo, las cuales no deben presentar un choque con el entorno para que este enlace sea válido.
El costo computacional para los algoritmos PRM es determinado por el número de veces que se invoque el algoritmo de detección de colisiones, y para tornar más eficiente al PRM se debe tratar de reducir el tamaño del Roadmap. De la anterior necesidad han surgido los métodos de exploración de entorno por medio de árboles: Expansive Spaces Trees (EST) y Rapidly Exploring Random Trees (RRT). El EST se encuentra explicado a cabalidad en el trabajo de David Hsu (Hsu, 2000), sin embargo el RRT es el más empleado actualmente.
Algoritmo RRT
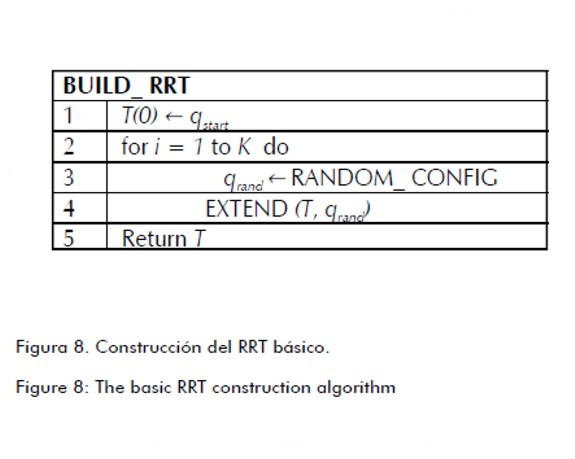
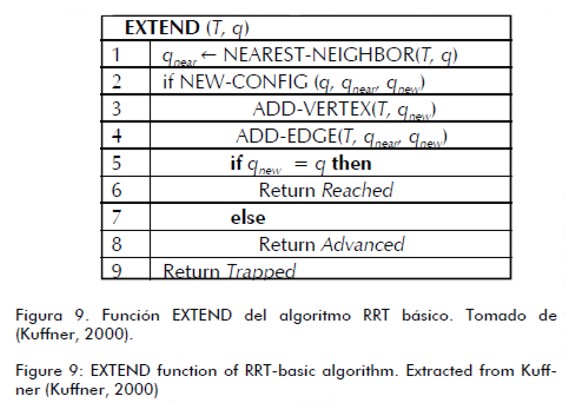
El RRT fue introducido como un algoritmo capaz de explorar eficientemente el espacio de configuración desde qstart (LaValle, 1999; LaValle, 2001). El RRT básico opera con la construcción de un árbol T compuesto de nodos y enlaces que se incrementan paulatina y aleatoriamente desde un punto de origen, tal y como se propone en el algoritmo de la figura 8. En este algoritmo se determina una configuración aleatoria qrand libre de colisión y a una distancia cercana al árbol; éste a su vez crece con un enlace hacia esa configuración, para ello se usa la función EXTEND presentada en la figura 9.
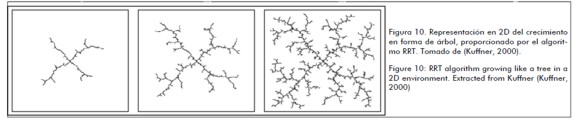
La naturaleza del RRT le hace avanzar con más avidez en aquellas zonas en las que haya mayor espacio libre, pues es allí donde hay más posibilidad de encontrar puntos qrand factibles. Esto puede comprenderse observando el crecimiento del árbol en la figura 10.
Para encontrar una trayectoria libre de colisiones, el RRT inicia su exploración en qstart como raíz del árbol T. Si el crecimiento de este árbol alcanza qgoal o se cumple un número límite de iteraciones K, mostrado en la Figura 8, el algoritmo RRT culmina y luego se traza una ruta desde qgoal a qstart. En otras palabras, se puede establecer un camino continuo entre nodos empezando desde las ramas, pasando por el tronco, hasta llegar a la raíz.
En los últimos años se han producido diferentes mejoras al RRT básico con resultados comprobados en la práctica (LaValle, 2006). En particular, la versión denominada RRT_Connect, desarrollada por Kuffner y LaValle (Kuffner, 2000), ha demostrado ser una de las variantes más confiables para todo tipo de aplicaciones.
La idea principal del RRT_Connect es el desarrollo de dos árboles que inician en los puntos inicial y final, ambos árboles crecen simultáneamente uno hacia el otro, permitiendo una mejora en la convergencia del algoritmo, así como en el tiempo de cómputo, debido al menor número de comprobaciones de colisión.
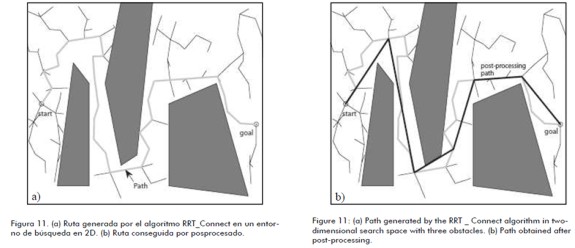
La figura 11 presenta el resultado de utilizar el RRT_Connect en un entorno de búsqueda R2 que contiene tres obstáculos poligonales (obsérvense las semejanzas con el espacio de configuración de un robot planar de dos articulaciones ilustrado en la figura 1). Para las rutas obtenidas con el método RRT es conveniente aplicar algoritmos de posprocesado con el objetivo de reducir su irregular topología; lo deseable es utilizar algoritmos de simplificación rápidos y sencillos para no comprometer el tiempo de cómputo total. Se ha observado que los algoritmos RRT son bastante rápidos en entornos abiertos (LaValle, 2001; Yershova, 2005) y además, más efectivos que otros métodos (Brandt, 2006).
Conclusiones y prospectivas
En este artículo se han presentado las bases teóricas necesarias para la implementación de dos estrategias de planeamiento de trayectorias libres de colisiones en sistemas n-dimensionales. La primera, campos potenciales artificiales, permite una rápida respuesta ante el entorno, generando un camino continuo y generalmente suave. Su principal desventaja está en la aparición de mínimos locales que llegan a producir un estancamiento del algoritmo empleado (Latombe, 1991). Adicionalmente, existe otro contratiempo: el número de puntos de control. Si no hay suficientes, existe el riesgo de colisionar obstáculos inadvertidos (Choset, 2005). Es concluyente que el método de campos potenciales requiere ajustar varios parámetros para que la trayectoria generada sea satisfactoria. Además, su implementación y análisis en el campo de la robótica demostró gran dependencia del método con el cálculo de los jacobianos del sistema, y de la obtención de la distancia mínima de un punto de control a un polígono o a un sólido.
En la segunda estrategia, que contempla los mapas de enrutamiento probabilístico o PRM, se destacaron en el uso e implementación el algoritmo RRT y su variante RRT-Connect, cuyas fortalezas son: la concepción generalizada para cualquier dimensión del entorno de búsqueda, donde no se requiere conocer totalmente el espacio de trabajo (Choset, 2005); su desempeño es rápido en entornos con pocos obstáculos, siendo capaz de sortear mínimos locales, y se logró comprobar su fiabilidad en entregar una respuesta (LaValle, 2001), pues se explora el espacio libre de forma sistemática. Algunas dificultades o contratiempos que presenta este método, son: la necesidad de verificar rápidamente si una configuración produce una colisión en el espacio de trabajo, ya que se deben hacer cientos de comprobaciones por segundo antes de generar una trayectoria. La configuración de la ruta encontrada es difícil de seguir en algunos casos prácticos, por lo cual es necesario un posprocesado rápido y eficiente. Adicionalmente, no se puede asegurar que la ruta obtenida sea óptima, incluso utilizando un posprocesado intensivo. Crear una ruta suavizada requiere un segundo posprocesado, utilizando geometría avanzada para generar curvas (Angeles, 2007; Kwangjin, 2008a; Kwangjin, 2008b).
Comparando los dos métodos analizados, implementados y probados, encontramos que el algoritmo RRT (y sus variantes), es más fiable en la consecución de una trayectoria libre de colisiones en sistemas multi-dimensionales en comparación con el método que utiliza campos potenciales artificiales. Hemos efectuado distintas simulaciones que implican trazar trayectorias empleando el algoritmo RRT_Connect y los resultados siempre han sido satisfactorios, aunque su costo computacional puede ser alto. Una característica que favorece la estrategia de los campos potenciales artificiales es la posibilidad de aplicación en robots móviles terrestres y voladores inmersos en entornos cambiantes.
A la hora de implementar cualquiera de los métodos expuestos en este texto se deben tener en cuenta los siguientes aspectos: para el método de campos potenciales artificiales se requiere obtener la distancia mínima entre polígonos o poliedros convexos y no convexos, lo cual no siempre es sencillo o evidente en el campo de la geometría computacional.
En el caso del algoritmo RRT el uso de una librería de software que permita determinar si existe colisión entre poliedros es un requerimiento para encontrar una trayectoria libre de colisiones. Sea cual fuere el método empleado, no se puede asegurar que la ruta encontrada sea la óptima. La estrategia que aborda los campos potenciales artificiales necesita, cuando se amerite, de un subsistema que elimine oscilaciones en la trayectoria generada. Por otra parte, al recurrir a los PRM la ruta obtenida después de un posprocesado generalmente resulta en una trayectoria que pasa muy cerca de los obstáculos, lo cual no es deseable en algunas aplicaciones.
El auge de los PRM y las variantes del algoritmo RRT han desembocado en nuevos desarrollos en diferentes áreas, como en la medicina (Jijie, 2008), concepciones para desembalaje de objetos articulados (Cortés, 2008a), exploración y navegación sobre terrenos accidentados (Cortés, 2008b) y sistemas autónomos de conducción de vehículos (Kuwata, 2008).
Referencias
Angeles, J., Fundamentals of robotic mechanical systems: theory, methods, and algorithms., New York, Berlin: Springer, 2007. [ Links ]
Brandt, D., Comparison of A* and RRT-Connect Motion Planning Techniques for Self-Reconfiguration Planning., Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on, Vol., Oct. 2006, pp.892-897. [ Links ]
Bresina, J.L., Jónsson, A.K., Morris, P.H., Rajan, K., Ctivity planning for the mars exploration rovers., 15th International Conference on Automated Planning and Scheduling, 2005, pp. 40-49. [ Links ]
Carsten, J., Rankin A., Ferguson D., Stentz A., Global planning on the Mars Exploration Rovers: Software integration and surface testing., J. Field Robot., Vol. 26, No. 4, 2009, pp. 337-357. [ Links ]
Choset, H., Lynch, K., Hutchinson, S., kantor, G., Bur-gard, W., Kavraki, L., Thrun, S., Principles of robot motion: theory, algorithms, and implementation., Cambridge, Mass.: MIT Press, 2005. [ Links ]
Cortes, J., Jaillet, L., Simeon, T., Disassembly Path Planning for Complex Articulated Objects., Robotics, IEEE Transactions on, Vol.24, No.2, April 2008a, pp.475- 481. [ Links ]
Cortes, J., Jaillet, L., Simeon, T., Transition-based RRT for path planning in continuous cost spaces., Intelligent Robots and Systems, 2008, IROS 2008. IEEE/RSJ International Conference on, 22-26 Sept. 2008b, pp.2145- 2150. [ Links ]
Craig, J., Introduction to Robotics: Mechanics and Control., Addison-Wesley, 1989. [ Links ]
Funge, J.D., Artificial intelligence for computer games: an introduction., Wellesley, Mass.: Peters, 2004. [ Links ]
Goldberg, K., Planar Robot Simulator with Obstacle Avoidance Configuration Space)., Diponible en: http://ford.ieor.berkeley.edu/cspace/. [ Links ]
Goldman, A., Path planning problems and solutions., in Book Path planning problems and solutions, Series Path planning problems and solutions, Vol.1, 1994, pp. 105-108. [ Links ]
Goo Bong, C., Soo Gang, L., Sungmin, K., Byung-Ju, Y., Whee-Kuk, K., Se Min, O., Young Soo, K., Jong, I.I.P., Seong Hoon, O., A robot-assisted surgery system for spinal fusion., in Book A robot-assisted surgery system for spinal fusion, Series A robot-assisted surgery system for spinal fusion, 2005, pp. 3015-3021. [ Links ]
Hsu, D., Randomized single-query motion planning in expansive spaces., PhD thesis, Department of Computer Science, Stanford University, 2000, Automation Science and Engineering, 2008. CASE 2008, IEEE International Conference on, Aug. 2008, pp.41-46, 23-26. [ Links ]
Jijie, X., Duindam, V., Alterovitz, R., Goldberg, K., Motion planning for steerable needles in 3D environments with obstacles using rapidly-exploring Random Trees and backchaining., Automation Science and Engineering, 2008, CASE 2008, IEEE International Conference on, Aug. 2008, pp.41-46, 23-26. [ Links ]
Kavraki, L., Svestka, P., Latombe, J.C., Overmars, M.H., Probabilistic roadmaps for path planning in high-dimensional configuration spaces., Robotics and Automation, IEEE Transactions on, Vol. 12, No. 4, 1996, pp. 566-580. [ Links ]
Khatib, O., Real-time obstacle avoidance for manipulators and mobile robots,. in Book Real-time obstacle avoidance for manipulators and mobile robots, Vol. 2, 1985, pp. 505, 500-505. [ Links ]
Kirillova, S., Cortes, J., Stefaniu, A., Simeon, T., An NMA-guided path planning approach for computing large-amplitude conformational changes in proteins., Proteins, Vol. 70, No. 1, 2008, p. 131. [ Links ]
Kuffner, J.J., Goal-Directed Navigation for Animated Characters Using Real-Time Path Planning and Control., Lecture notes in computer science., No. 1537, 1998, p. 171. [ Links ]
Kuffner, J. J., LaValle, S. M., RRT-connect: An effi-cient approach to single-query path planning., Robotics and Automation, 2000. Proceedings. ICRA'00. IEEE International Conference on, Vol.2, 2000, pp.995-1001. [ Links ]
Kuwata, Y., Fiore, G.A., Teo, J., Frazzoli, E., How, J.P., Motion planning for urban driving using RRT., Intelligent Robots and Systems, 2008. IROS 2008. IEEE/RSJ International Conference on, 22-26 Sept. 2008, pp.1681-1686. [ Links ]
Kwangjin, Y. and Sukkarieh, S., 3D smooth path planning for a UAV in cluttered natural environments., Intelligent Robots and Systems, 2008. IROS 2008. IEEE/RSJ International Conference on, Sept. 2008a, pp.794-800, 22-26. [ Links ]
Kwangjin, Y., Sukkarieh, S., Real-time continuous curvature path planning of UAVS in cluttered environments., Mechatronics and Its Applications, 2008. ISMA 2008, 5th International Symposium on, May 2008b, pp.1-6, 27-29. [ Links ]
Latombe, J.-C., Robot motion planning., Boston, MA: Kluwer Academic Publishers, 1991. [ Links ]
LaValle, S. M., Planning algorithms, Cambridge; New York: Cambridge University Press, 2006. [ Links ]
LaValle, S. M., Kuffner, J. J., Randomized kinodynamic planning.,Robotics and Automation, 1999, Proceedings, IEEE International Conference on, Vol.1, 1999, pp.473-479. [ Links ]
LaValle, S. M., Kuffner, J. J., Rapidly-exploring random trees: Progress and prospects., In B. R. Donald, K. M. Lynch, and D. Rus, editors, Algorithmic and Computational Robotics: New Directions, A K Peters, Wellesley, MA, 2001, pp. 293 -308. [ Links ]
Lozano-Pérez, T., Automatic planning of manipulator transfer movements., IEEE Trans. Systems, Man, and Cybernetics SMC-11, No. 110, 1981, pp. 681-689- 681-689. [ Links ]
Maio, D., Rizzi, S., CICERO: An Assistant for Planning Visits to a Museum., Lecture notes in computer science, No. 978, 1995, pp. 564, 1995. [ Links ]
Sim, C., Wan Sing, N., Ming Yeong, T., Yong-Chong, L., Tseng Tsai, Y., Image-guided manipulator compliant surgical planning methodology for robotic skull-base surgery., in Book Image-guided manipulator compliant surgical planning methodology for robotic skull-base surgery, Series Image guided manipulator compliant surgical planning methodology for robotic skull-base surgery, pp. 26-29, 2001. [ Links ]
Spong, M., Hutchinson, S., Vidyasagar, M., Robot modeling and control., Hoboken, NJ: John Wiley & Sons, 2006. [ Links ]
Wenhu, Q., Xiaomei, L., Zhengxu Z., Study on Action Control of Virtual Actors., in Book Study on Action Control of Virtual Actors, Series Study on Action Control of Virtual Actors, 2007, pp. 907-912. [ Links ]
Yershova, A., Jaillet, L., Simeon, T., LaValle, S. M., Dynamic-Domain RRTs: Efficient Exploration by Controlling the Sampling Domain., Robotics and Automation ICRA 2005, Proceedings of the 2005 IEEE International Conference, 18-22 April 2005, pp. 3856-3861. [ Links ]

