










Services on Demand
Journal
Article
 text in
text in  Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería e Investigación
Print version ISSN 0120-5609
Ing. Investig. vol.31 no.2 Bogotá May/Aug. 2011
Evaluación de la fuerza de arrastre y optimización geométrica del cuerpo de un PIG con baipás
Evaluating drag force and geometric optimisation of pipeline inspection gadget (PIG) body with bypass
Ricardo Ramírez1, Max Dutra2
1 Ingeniero Mecánico, Departamento de ingeniería Mécanica y Mecatrónica, Universidad Nacional de Colombia, Colombia. reramirezh@unal.edu.co
2 Programa de Ingeniería Mecánica, COPPE, Universidad Federal de Río de Janeiro, Brasil. max@mecanica.coppe.ufrj.br
RESUMEN
Un PIG es un dispositivo o vehículo que se desplaza entre ductos, siendo utilizado en operaciones de limpieza, medición e inspección, principalmente aplicado en oleoductos y gasoductos. Baipás es el nombre de uno o varios orificios que permiten el paso de fluido de atrás hacia adelante del PIG. Es utilizado para controlar la velocidad o para mejorar el resultado de las operaciones de limpieza. En gasoductos el baipás controla las variaciones bruscas de velocidad, evitando daños en el PIG o el ducto. Estudios y algoritmos han sido desarrollados para simular la dinámica de los PIG y su paso por los ductos. La mayoría de estos estudios son sobre ductos con gas y han servido para el diseño de algunos modelos de PIG. Este trabajo describe parte del diseño de un PIG que trabaja con líquidos, capaz de realizar tareas de inspección o mantenimiento dentro del ducto. El estudio de la fuerza que ejerce el fluido en el PIG cuando tiene baja o nula velocidad es necesario para evaluar la viabilidad del proyecto y la concepción del diseño. Al mismo tiempo, definir una forma geométrica del PIG que minimice la fuerza de interacción con el fluido permite diseñar un PIG más liviano y que cause menores pérdidas de energía.
Palabras clave: CFD interacción fluido-estructura, optimización, PIG, oleoductos.
ABSTRACT
A pipeline inspection gadget (PIG) is a device used to run through pipelines for cleaning, measurement and inspection operations. By-pass is the name for one or a set of orifices allowing flow from back to front of a PIG. It is used for speed control or to improve cleaning operations results. By-pass prevents speed excursions in gas pipelines thereby avoiding damage to the PIG or the pipe. Studies and algorithms have been developed to simulate the dynamics of PIGs running inside pipes. Most studies have been for gas pipelines; these have helped to design some PIG models. This work summarises a particular stage during a PIG design project. This PIG will work in liquid pipelines and can stop in the line for inspection and maintenance tasks. Studying fluid force on a PIG when it has low or zero speed is needed for evaluating project feasibility and conceptual design. Selecting a PIG form to minimise the force of interaction with fluid allows a low weight design and lower energy loss.
Keywords: CFD, fluid structure interaction, optimisation, PIG, pipeline.
Introducción
Los PIG son dispositivos, herramientas o vehículos autocontenidos e independientes, que se mueven entre ductos y se utilizan en operaciones de limpieza, dimensionamiento e inspección (PPSA, 2010) tradicionalmente aplicadas en oleoductos y gasoductos. La velocidad de desplazamiento de los PIG varía debido a las irregularidades del tubo, a los cambios en las condiciones físicas entre las superficies en contacto y a variaciones en el caudal. Los cambios de velocidad son mayores en gasoductos por la compresibilidad del fluido, y llegan a ser peligrosos para la integridad del PIG o del tubo. El fenómeno de grandes aceleraciones es conocido como excursiones de velocidad (Mattheus et al, 2007). El uso de ori ficios llamados baipás en el cuerpo del PIG es una de las formas de atenuar las excursiones de velocidad.
Un baipás permite el paso de fluido de atrás hacia adelante del PIG y tiene como resultado que la velocidad de desplazamiento del dispositivo sea diferente de la velocidad media de flujo. Se han realizado varios estudios para diseño de PIG con baipás (Nguyen et al, 2001; Boe, 2007; Korea Gas Corporation, 2010; Podgorbunskikh, 2008). En algunos casos los orificios de baipás son utilizados para obtener chorros del mismo fluido a los fines de mejorar los resultados de las pasadas de limpieza. En otros casos se adiciona al orificio una válvula que permite controlar la velocidad del PIG (Frota, 2007).
Se proyecta un PIG para oleoductos que tenga como características especiales la capacidad de control de velocidad y la de parar dentro del ducto mientras éste continúa transportando combustible.
El concepto inicial para el cuerpo del PIG es un cilindro con un orificio central que actúe como baipás. El cuerpo va soportado por discos de poliuretano similares a los que se usan en los actuales PIG de limpieza. En el orificio será colocada una válvula que lleva a cabo el control de velocidad, de parada y de arranque. El diseño de está válvula no está incluido en el alcance del presente trabajo.
El objetivo es el de optimizar la forma y las dimensiones del ilindro para lograr dos propósitos: minimizar la fuerza de interacción entre el fluido y el cuerpo, y maximizar el volumen del cuerpo. El primero de ellos permite disminuir los requerimientos de diseño mecánico y de control de la válvula, además de la pérdida de energía causada por la presencia del PIG en el ducto. El segundo permite un mayor volumen interno disponible dentro del cuerpo para colocar elementos como baterías, placas electrónicas y actuadores.
Procedimiento
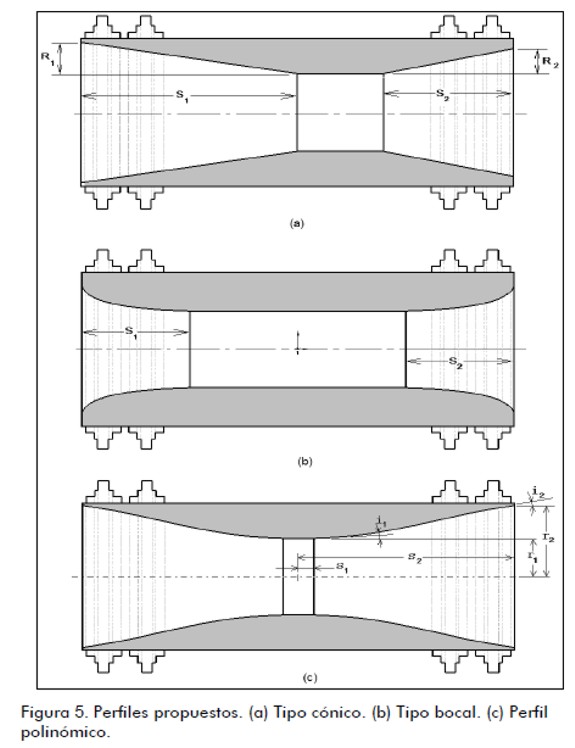
La optimización de forma es realizada en dos etapas. En la primera se considera el orificio de baipás con diámetro constante y se obtiene el diámetro óptimo. En la segunda el orificio es modificado a formas que correspondan a varios perfiles propuestos con el fin de reducir más la fuerza de interacción. Se seleccionan el mejor perfil y las dimensiones óptimas para ese perfil.
Durante el proceso de optimización para las dos etapas se encontró que al mudar las dimensiones del cuerpo del PIG, si disminuye la fuerza de interacción también se reduce el volumen del cuerpo. Eso significa que si un objetivo se acerca a su valor óptimo el otro objetivo se aleja; se tiene un caso de objetivos en conflicto, y la obtención del valor óptimo de diámetro se hizo utilizando el concepto de frontera de Pareto (Araújo et al, 2009).
Materiales y métodos
Especificaciones generales
El modelo estudiado está formado por un segmento de tubo y el PIG (figura 1 ). El tubo es cilíndrico, recto y horizontal. El diámetro nominal escogido en el proyecto es de 12 pulgadas, que corresponde a un tubo de diámetro interno de 304,8 mm y externo de 323,85 mm; la longitud es de 4 m y la rugosidad interna de 25 micrómetros típica para ductos de acero nuevos (Stukenbruck, 2008).
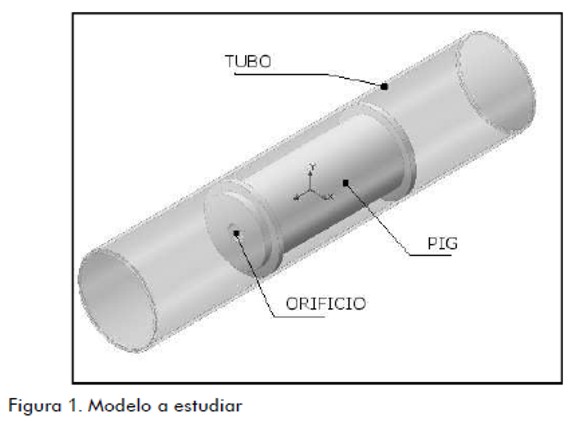
El modelo usado para simular el PIG es un cilindro con salientes que simulan los discos de raspado, tiene un orificio axial cuya forma y dimensiones varían para los diferentes casos a ser simulados. El diámetro externo corresponde con el diámetro interno del tubo. La longitud de PIG usada es dos veces el diámetro interno del tubo, una relación comúnmente utilizada por los fabricantes de PIG la cual permite que el PIG no quede atascado en las curvas del ducto.
El fluido considerado es gasolina con densidad constante de r = 747 kg/m3 y viscosidad dinámica μ = 6,57 x 10-4 Pa·s, también constante. La velocidad del flujo máxima es de 5 m/s, que corresponde a la velocidad utilizada típicamente en poliductos que transportan productos refinados.
Cálculo del diámetro de orificio óptimo
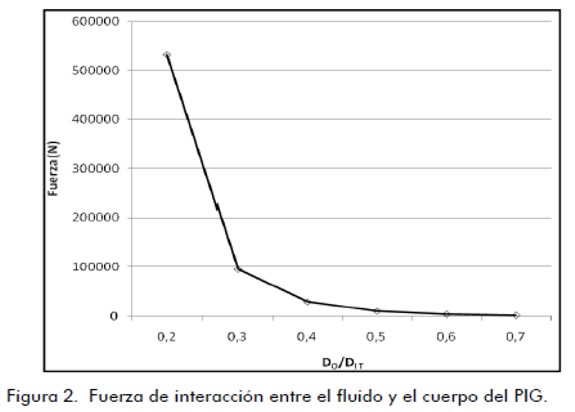
El diámetro del orificio (DO) se varía de 10% a 70 % del diámetro interno del tubo (DIT) en pasos de 10%. La fuerza (F) que ejerce el fluido sobre el cuerpo del PIG en la dirección de desplazamiento se evalúa para cada caso utilizando una herramienta de dinámica computacional de fluidos (CFD). El resultado de la fuerza como función de la relación DO/DIT es presentado en la figura 2 .
Para cada caso es calculado también el volumen del cuerpo del PIG (VP) (ecuación 1 ).
 | [1] |
donde DE es el diámetro externo del PIG y LP la longitud del cuerpo del PIG. El resultado es presentado en la figura 3.
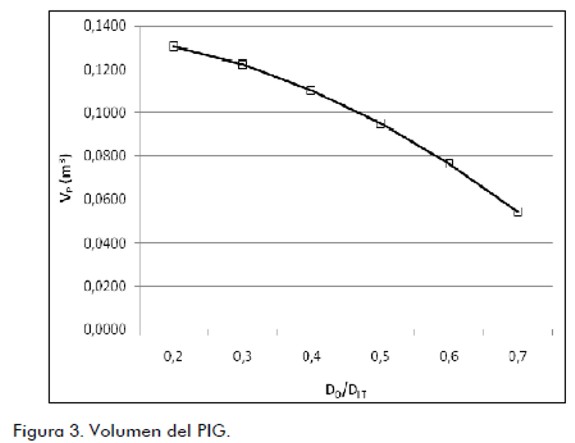
Al aumentar el diámetro del orificio la fuerza disminuye y el volumen aumenta. Como se desea minimizar la fuerza y maximizar el volumen, se concluye que los dos objetivos están en conflicto. Por otro lado, los órdenes de magnitud de la fuerza y del volumen no son comparables. Para obtener el diámetro óptimo se definen dos funciones, f1 y f2 (ecuaciones 2 y 3):
 | [2] |
 | [3] |
La función f1 normaliza la fuerza a un rango entre 0 y 1, y para minimizar la fuerza se debe minimizar f1. La función f2 normaliza el volumen a un rango entre 0 y 1 para hacerlo comparable con la función f1 y para maximizar el volumen se debe minimizar f1.
Se define una nueva función (ecuación 4):
 | [4] |
El parámetro C1 es un criterio de diseño mediante el cual el diseñador puede dar mayor o menor importancia al objetivo de minimizar la fuerza o de maximizar el volumen. C1 se hace variar de 0 a 1 en pasos de 0.1. Si C1 es pequeño significa que para el diseño es más importante maximizar el volumen que minimizar la fuerza, y si C1 es grande significa la condición contraria.
Para cada valor de C1 el diámetro óptimo es el que minimiza la función f. Los resultados representan la frontera de Pareto (figura 4).
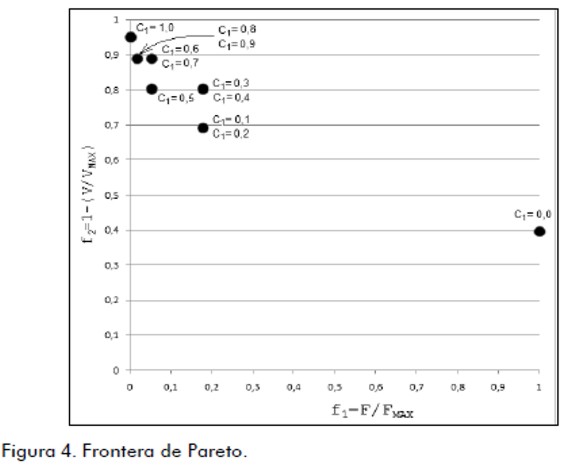
Se seleccionó un criterio que equilibre los dos objetivos, el cual corresponde al valor C1 = 0,5. El diámetro óptimo que minimiza la función f es de 0,06 m o 60 mm.
Selección y optimización del perfil del orificio
El uso de un cuerpo con un baipás de diámetro constante hace que el flujo tenga dos cambios bruscos de área, una contracción súbita en la parte trasera del PIG y una expansión súbita en la parte delantera que generan pérdidas de carga y que pueden ser reducidas al modificar el perfil del orificio para que la contracción y la expansión sean más suaves.
Resultados
La fuerza en todos los casos fue calculada utilizando el software de CFD. El volumen fue calculado mediante una fórmula geométrica en el primer perfil y por integración del sólido de revolución para el segundo y el tercer perfil.
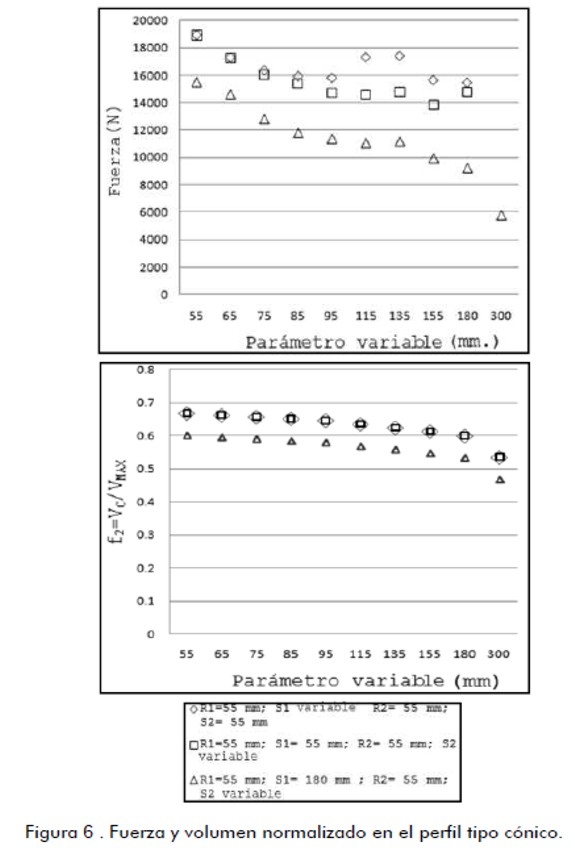
Resultados para el perfil tipo cónico
Los resultados de fuerza y de la función de volumen normalizado del cuerpo para el perfil tipo cónico son presentados en la figura 6.
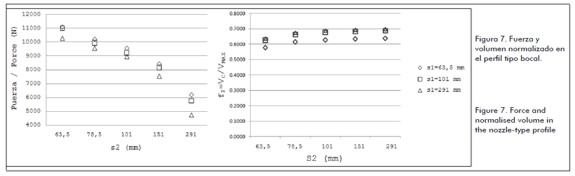
Resultados para el perfil tipo bocal
Los resultados de fuerza y de la función de volumen normalizado para el perfil tipo bocal son presentados en la figura 7.
Resultados para el perfil tipo polinómico
Los resultados de fuerza para el perfil tipo polinómico son presentados en la figura 8. El número de perfiles posibles es mayor por la dependencia de seis parámetros. A los objetos de obtener los perfiles con la menor fuerza fue llevado a cabo un proceso tipo algoritmo genético. Se generaron de forma aleatoria conjuntos de valores r2, s1 e i2 (figura 5(c)) y con cada conjunto fue calculado y construido el correspondiente perfil. El cálculo de fuerza fue hecho para este conjunto de perfiles. Los perfiles correspondientes a los casos con fuerza menor, fueron seleccionados y los parámetros de estos perfiles se cruzaron para generar una segunda generación de perfiles. Nuevamente se hicieron corridas de software para calcular las fuerzas.
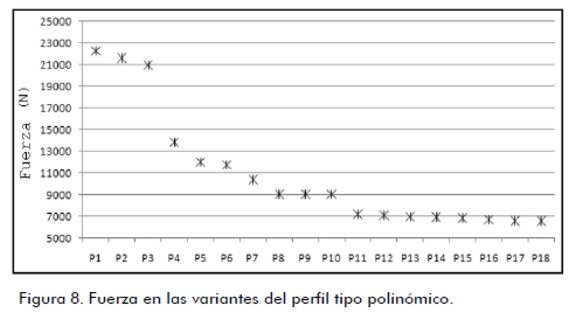
Los resultados de la función de volumen normalizado son presentados en la figura 9. Los perfiles sobre los que son calculados los resultados se nombran consecutivamente como P1 hasta P18.
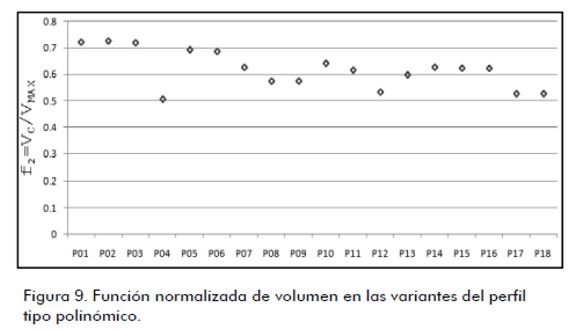
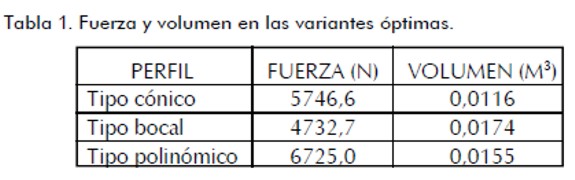
Para cada uno de los perfiles fue aplicado un proceso de optimización multiobjetivo similar al descrito para la obtención del diámetro de orificio óptimo. Así, en cada conjunto de variantes fue seleccionada una como la variante óptima de cada tipo de perfil que minimiza la fuerza y maximiza el volumen. El valor para el criterio de diseño tomado es: C1 = 0,5.
En la tabla 1 son indicadas las variantes seleccionadas como óptimas, con los correspondientes valores de fuerza y volumen disponible.
Análisis de resultados
Cualquiera de estas opciones es una solución para construcción del cuerpo del PIG. Cada una de ellas cumple en su tipo como la mejor combinación de mínima fuerza con el mayor espacio disponible. En la etapa de construcción del prototipo pueden construirse los tres modelos y seleccionar uno, según el resultado de pruebas experimentales.
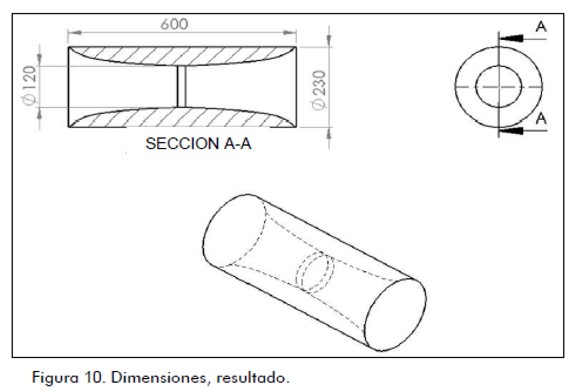
También, cada uno puede ser adecuado a un tipo de ducto o de fluido. Para la selección de una de las tres opciones del proyecto se utilizaron los mismos criterios de mínima fuerza y de máximo volumen; en consecuencia, la opción definida para el cuerpo del PIG es la de orificio con perfil de tipo bocal.
Las dimensiones propuestas para el PIG como resultado del proceso de optimización se presentan en la figura 10.
Referencias
Araújo A., Martins, P., Mota Soares, C. M., Mota Soares, C. A., Herskovits, J., Damping optimization of viscoelastic laminated sandwich composite structures., Structural and Multidisciplinary Optimization, Vol. 39, No. 6, December, 2009, pp. 569,579. [ Links ]
Boe, K., Pipeline PIG., Patent Application Publication. 0214590 A1 United States of America, September of 2007. [ Links ]
Frota, C., Inspeção com PIG instrumentado (MFL, geométrico e Inercial) no gasoduto Bolivia-Brasil., Neto. Anais da Rio Pipeline 2007 Conference, Instituto Brasileiro de Petróleo, Gás e Biocombustíveis (IBP), Outubro, 2007. [ Links ]
Korea Gas Corporation. R+D Division., Inteligent PIG. Details of research. En: http://www.kogas.re.kr/eng/index.jsp. últimoacceso: November de 2010. [ Links ]
Mattheus, L., Kennard, M. y O'Donoghue, A., Velocity control of pigs in gas pipelines., En: Pipeline Pigging and Integrity Technology, Scientific Surveys Ltd., 3401, Lousiana, Suite 255,Houston, TX 77002, USA, cap. 3, 2007, pp. 35-48. [ Links ]
Nguyen T. T., Yoo. H. R., Rho, Y. W., Kim, S. B., Speed control of pig using by-pass flow in natural gas pipeline., Proceedings of 2001 IEEE International Symposium on Industrial Electronics, IEEE Industrial Electronics Society, Pusan, Korea, 2001. [ Links ]
Pipeline Pigging Products and Services Association (PPSA)., Pigging terminology, abbreviations and formulae., En:http://www.ppsaonline.com/pigging-terms.php. último acceso: noviembre de 2010. [ Links ]
Podgorbunskikh, A. M., Devices for Automated Regulation of the Velocity of InTube Pig Flaw Detectors Review., Russian Journal of Nondestructive Testing, Vol. 44, No. 5, 2008, pp. 343 -350. [ Links ]
Stukenbruck, S., Notas do curso "Escoamento em Dutos"., Pontifícia Universidade Católica do Rio de Janeiro, 2008. [ Links ]

