










Services on Demand
Journal
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería e Investigación
Print version ISSN 0120-5609
Ing. Investig. vol.34 no.1 Bogotá Jan./Apr. 2014
https://doi.org/10.15446/ing.investig.v34n1.42793
http://dx.doi.org/10.15446/ing.investig.v34n1.42793
Optimization of the efficiency of a biomimetic marine propulsor using CFD
Optimización del rendimiento de un propulsor marino y biomimético utilizando CFD
M. I. Lamas Galdo1, C. G. Rodríguez Vidal2 and J. D. Rodríguez García3
1María Isabel Lamas Galdo. Mechanical Engineer, University of Coruña, Spain. PhD in Mechanical Engineering, University of Coruña, Spain. Affiliation: Associate Professor, University of Coruña, Spain.
E-mail: isabellamas@udc.es.
2Carlos Gervasio Rodríguez Vidal. Marine Engineer, University of Coruña, Spain. MSc in Marine Engineering, University of Coruña, Spain.
E-mail: c.rodriguez.vidal@udc.es.
3Juan de Dios Rodríguez García. Mechanical Engineer, University of Coruña, Spain.
PhD in Mechanical Engineering, University of Coruña, Spain. Affiliation: Associate Professor, University of Coruña, Spain.
E-mail: jdedios@cfd.udc.es.
How to cite: Lamas, M. I., Rodríguez, C. G., Rodríguez, J. D., Optimization of the efficiency of a biomimetic marine propulsor using CFD., Ingeniería e Investigación, Vol. 34, No. 1, April, 2014, pp. 17 – 21.
ABSTRACT
The purpose of this paper is to employ a CFD (Computational Fluid Dynamics) procedure to optimize a biomimetic marine propulsor. This propulsor is based on an undulating panel which emulates the movement of a fin fish. The numerical model has been employed to analyze the hydrodynamics and improve the efficiency. Particularly, the fin shape has been studied as measure to improve the efficiency. Three fin shapes have been analyzed, rectangular, elliptic and lunate. The results have indicated that, for the same area, the lunate shape is the most efficient.
Keywords: Marine propulsion, biomimetics, CFD (Computational Fluid Dynamics).
RESUMEN
El propósito de este artículo es emplear un procedimiento de CFD (Mecánica de Fluidos Computacional) para optimizar un propulsor marino de inspiración biológica. Este propulsor está basado en un panel ondulante, que imita el movimiento de una aleta de pez, dicho modelo numérico se ha empleado para analizar la hidrodinámica y mejorar el rendimiento, de igual manera la forma de la cola ha sido estudiada como un mecanismo para generar mayores beneficios . Se han analizado tres formas de aleta: rectangular, elíptica y en media luna, os resultados han indicado que la aleta con forma de media luna es la más eficaz.
Palabras clave: propulsión marina, biomimética, CFD (Mecánica de Fluidos Computacional).
Received: May 13th 2013 Accepted: December 5th 2013
Introduction
Biomimetics, also called biomimicry or bionics, involves the imitation of nature in manmade systems. An area of biomimetics that is recently gaining an increasing level of popularity is marine propulsion. Fish swimming is the result of millions of years of evolutionary optimization to develop very efficient movement. For this reason, several fish movements are inspiring technology for marine propulsion. In comparison with a classical rotary propeller, a bio-inspired propulsor generates less turbulence and creates an efficient jet in the direction of thrust. A propeller generates more turbulence and a jet, which rotates in the direction perpendicular to the motion, wasting a considerable amount of power.
Several mechanisms for marine propulsion that emulate the locomotion of fish have been built in recent years. Most fish swim by moving their body and/or caudal fins. This is called BCF locomotion and includes anguilliform, caranguiform, thunniform and os-traciiform modes of swimming. In anguilliform mode for example, the undulation takes place along the whole body. Similar movements are observed in caranguiform mode, but with the amplitude undulations growing toward the tail. In thunniform mode, the amplitude undulations also grow toward the tail and practically take place in the posterior half of the fish. Ostraciiform locomotion is characterized by the oscillation of the caudal fin, while the body remains essentially rigid. In the available literature, there are many works about marine propulsors that imitate anguilliform (Wilbur et al., 2002; Westphal et al., 2011; Xu et al., 2012; Crespi et al., 2005; Ijspeert et al., 2005; McIsaac and Ostrowski, 2002; Lamas et al., 2010), caranguiform (Kumph, 2000; Watts et al., 2007; Hirata et al., 2000; Morgansen, 2003; Heo et al., 2007), thunniform (Anderson and Chabra, 2002; Suleman and Crawford, 2008; Nakashima et al., 2006; Yu et al., 2007; Yu et al., 2009; Shen et al., 2011) and ostraciiform (Kodati et al., 2008; Hu et al., 2009; Yamamoto et al., 1995; Saimek and Li, 2001; Herr and Dennis, 2004; Guo, 2003) locomotion.
Other fish swim by moving their median and/or paired fins. This is called MPF locomotion, and includes rajiform, gymnotiform, amiiform and labriform modes, among others. Rajiform, amiiform and gymnotiform modes are based on the undulation of the pectoral, dorsal and anal fins respectively. Labriform swimming is based on oscillations instead of undulations. According to Sfakiotakis (1999), due to its lower efficiency in comparison with BCF swimming modes, MPF locomotion has inspired fewer mechanisms for marine propulsion. One can refer to mechanisms that imitate rajiform (Cai et al., 2010; Chen et al., 2011; Clarck and Smiths, 2006; Low, 2008; Zhang et al., 2008), gymnotiform (Low, 2007; Epstein et al., 2006; MacIver et al., 2004; Siahmansouri et al., 2011) and labriform (Kato, 2000; Kim et al., 2013; Gordon et al., 2000; Georgiades et al., 2009; Sitorus et al., 2009) modes of MPF locomotion.
This work is a continuation of an analysis developed by Lamas et al. (2012). In this cited paper, several fish swimming modes were studied numerically: anguilliform, caranguiform, thunniform, ostraciiform and gymnotiform, concluding that thunniform is the most efficient swimming mode. Given this finding, the main objective of the present study is to improve the efficiency of the thunniform movement. For the purpose, three fin shapes were analyzed: rectangular, elliptical and lunate. The effect of fin shape on propulsion efficiency has been analyzed in the literature by other authors. For example, Liu and Bosse (1999) and Yamamoto et al. (1995), concluded that a lunate flapping-foil is much more efficient than a rectangle flapping-foil. Liu et al. (2001), demonstrated that larger aspect ratios and sweepback angles promote larger cruising speeds and Li and Yin (2008), concluded that the mean thrust force on a bio-caudal fin is proportional to the product between the dimensionless second moment and the plan form area. The present paper offers a numerical perspective to delve deeper into the subject of fin shape given that a numerical model provides information that cannot be obtained experimentally. Furthermore, a numerical computation of efficiency is much faster and less expensive than an experimental setup. The model developed in this work provides a useful tool to evaluate different configurations.
Problem definition
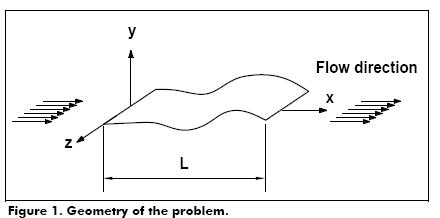
The working principle of the biomimetic propulsor developed in the present paper is shown in Fig. 1. It consists of an undulating panel, which produces a wake in the opposite direction of movement. The pressure field in the region of the wake produces thrust.
The thunniform swimming mode was modeled using the following equation for the undulation of the fin:
where λ represents the wavelength, T the period and A(x) the amplitude, given by:

Numerical procedure
Governing equations
The governing equations are those of conservation of mass and momentum, Eqs. 3 and 4 respectively. The problem was modeled as turbulent due to the high Reynolds numbers. The k-ε turbulence model was employed because this is robust, economical and reasonably accurate for a wide range of cases (Versteeg and Malalasekera, 2006).
In order to save computational time, the problem was solved using a domain, which moves with the fin (if the problem is solved in a fixed coordinate system, a very large domain would be necessary to encompass the advancing position of the fin).
Boundary conditions and initial conditions
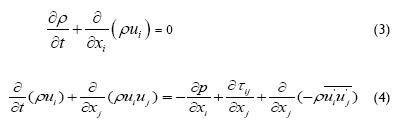
The boundary conditions are indicated in Fig. 2. The domain presents an inlet and an outlet. The undulating fin was modeled as a noslip wall and the top and bottom surfaces were assumed as slip walls, corresponding to an infinite medium. In virtue of the symmetry, only half of the domain was simulated.
As an initial condition, the velocity was set to the cruising velocity obtained in a previous paper, Lamas et al., (2012).
Calculation of the efficiency
The total power required for the propulsive motion of the fin consists of two components; one is the swimming power required to produce the vertical oscillations of the fin and the other is the useful power required to thrust. The efficiency was computed as the ratio between the useful power and the total power.
The swimming power was computed as:

where p is the pressure of the surface of the plate and dywall/dt refers to the y-component of the velocity at the surface of the fish.
The useful power was computed as the time-average thrust mul-tiplied by the free-stream velocity:

where the minus sign indicates that the velocity of swimming is reverse to that of the stream.
Computational mesh
The 3D CAD was designed using SolidEdge ST and then exported to Gambit 2.4. Figure 2 shows the computational mesh used for the rectangular configuration. In this figure, the front surface and the internal mesh were omitted for clarity. This mesh has 600000 tetrahedral elements, and was refined on the fin surface and the wake region. The meshes employed to simulate the elliptical and lunate fins are similar to that shown in Fig. 2.
Numerical aspects
Ansys Fluent 6.3 software was employed for the computations. The PISO algorithm was chosen for the pressure-velocity coupling. A second order interpolation was used for the discretization of the convective terms and an implicit scheme for the temporal treatment, with a constant time step of 0.001 s. Both time step and size mesh were checked in order to obtain independence of these parameters in the results.
In order to reach a steady state, 20 periods of time were computed. The results presented herein correspond to the 20th time period.
Validation of the model
The numerical model has been validated elsewhere, Lamas et al. (2012). In this previous work, the results obtained numerically were compared with experimental measurements performed in the mechanism shown in Fig. 3 (a). Fig. 3 (b) indicates the mechanism installed in a catamaran 2.16 m long.
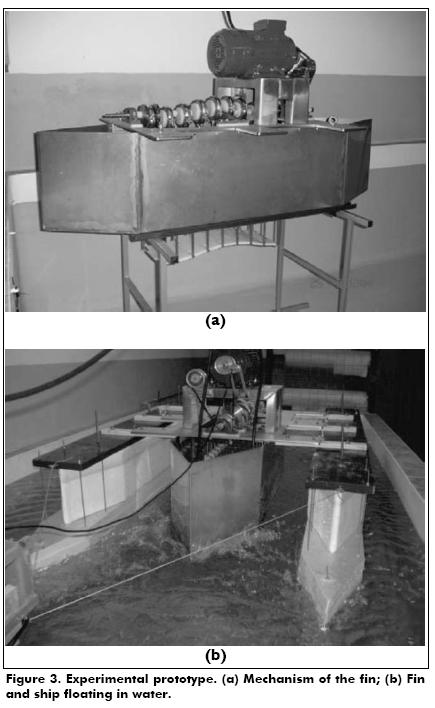
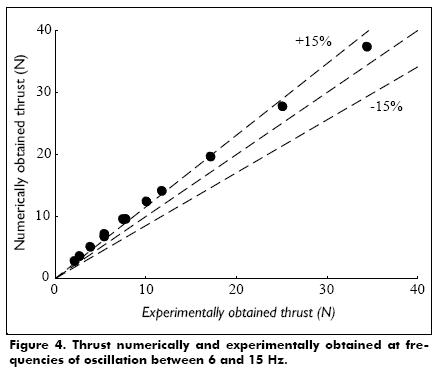
The experimental results were based on tying the ship to a fixed point by means of a rope, as can be seen in Fig. 3 (b). The thrust was measured at different oscillation frequencies of the fin. A variable-frequency drive control was used to control the oscillation frequency of the electrical motor. Numerically, these setups were simulated using a zero free-stream velocity. Numerical and experimental results of the thrust are compared in Fig. 4. These were obtained at different frequencies of oscillation from 6 to 15 Hz. As can be seen, a satisfactory concordance between numerical and experimental results has been found.
Results and discussion
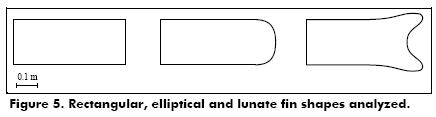
The three caudal fin shapes analyzed in the present work are shown in Fig. 5. All have an area of 0.104 m2. Concerning the lengths, these are 0.520 m for the rectangular, 0.538 for the elliptical and 0.541 for lunate fin shape. These small diferences in length makes the difference in the Reynolds number negligible and thus, the different effect of turbulence intensity on drag.
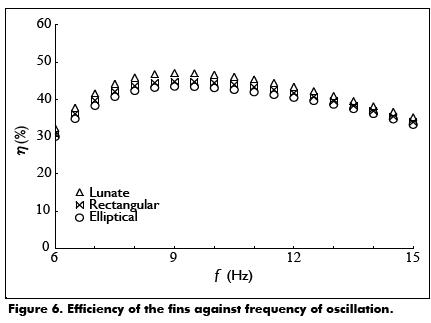
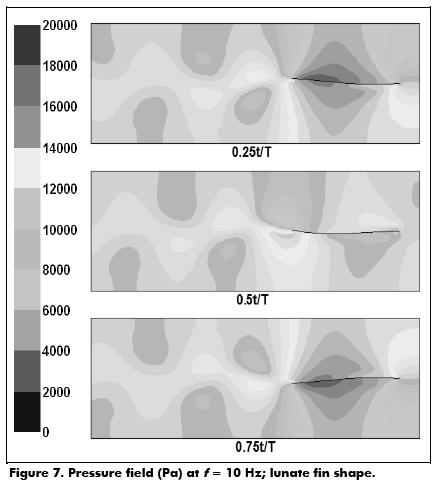
The results of the efficiency against the frequency of oscillation are presented in Fig. 6 for all three fin shapes. As can be seen, the efficiency increases with the frequency of oscillation and then decreases. Additionally, the efficiency is higher for the lunate shape and lower for the elliptical shape. The reason for these results is the configuration of the wake behind the fin. This wake is an array of von Karman vortices which generate thrust. Several authors relate these vortices with drag-reduction properties, including Gopalkrishnan et al. (1994), Barrett (1996), Anderson (1996) and Streitlien et al. (1996). For this reason, the adequate configuration of the wake has a crucial repercusion on the efficiency. This wake is indicated in Fig. 7, which represents the pressure field around the lunate fin shape running at 10 Hz. The instants 0.25t/T, 0.5t/T and 0.75t/T, where T is the period, are represented. As can be seen, a reverse Karman vortex street is generated behind the fin, i.e., a staggered array of vortex with the signs of vorticity reversed.
Conclusions
This work has presented a biologically-inspired marine propulsor based on an undulating fin that imitates a thunniform movement. Three fin shapes were studied in order to improve the efficiency and the results have shown that the lunate shape is the most efficient.
In future works, it is important to determine more modifications in order to improve the efficiency, for instance other dimensions such as length and width. Other possible modifications to improve efficiency could include a nozzle around the fin in order to avoid lateral losses.
Acknowledgements
The authors gratefully acknowledge the financial support for this research provided by Xunta de Galicia, Spain.
References
Anderson, J. M., Vorticity control for efficient propulsion., a Ph.D. Thesis presented at Massachusetts Institute of Technology, 1996. [ Links ]
Anderson, J. M., Chabra, N. K., Maneuvering and stability performance of a robotic tuna., Integrative and comparative biology, Vol. 42, 2002, pp. 118-126. [ Links ]
Barrett, D. S., Propulsive efficiency of a flexible hull underwater vehicle., a Ph.D. Thesis presented at Massachusetts Institute of Technology, 1996. [ Links ]
Cai, Y., Bi, S., Zheng, L., Design and experiments of a robotic fish imitating cownosed ray., Journal of Bionic Engineering, Vol. 7, 2010, pp. 120-126. [ Links ]
Chen, Z., Um, T. I., Bart-Smith, H., Ionic polymermetal composite enabled robotic manta ray., Electroactive Polymer Actuators and Devices (EAPAD), Vol. 7976, 2011. [ Links ]
Clarck, R. P., Smits, A. J., Thrust production and wake structure of a batoid-inspired oscillating fin., Journal of Fluid Mechanics, Vol. 562, 2006, pp. 415-429. [ Links ]
Crespi, A., Badertscher, A., Guignard, A., Ijspeert, A. J., AmphiBot I: an amphibious snake-like robot., Robotics and Autonomous Systems, Vol. 50, 2005, pp. 163-175. [ Links ]
Epstein, M., Colgate, J. E., MacIver, M. A., Generating thrust with a biologically-inspired robotic ribbon fin., Memoirs from the IEEE International Conference on Intelligent Robots and Systems, 2006, pp. 2412-2417. [ Links ]
Georgiades, C., Nahon, M., Buehler, M., Simulation of an underwater hexapod robot., Ocean Engineering, Vol. 36, 2009, pp. 39-47. [ Links ]
Gopalkrishnan, R., Triantafyllou, M. S., Triantafyllou, G. S., Barrett, D., Active vorticity control in a shear flow using a flapping foil., Journal of Fluid Mechanics, Vol. 274, 1994, pp. 1-21. [ Links ]
Gordon, M., Hove, J., Webb, P., Weihs, D., Boxfishes as unusually well-controlled autonomous underwater vehicles., Physiological and Biochemical Zoology, Vol. 74, 2000, pp. 663-671. [ Links ]
Guo, S., A new type of fish-like underwater microrobot., IEEE/ASME Transactions of Mechatronics, Vol. 8, 2003, pp. 136-141. [ Links ]
Herr, H., Dennis, B., A swimming robot actuated by living muscle tissue., Journal of NeuroEngineering and Rehabilitation, Vol. 1, 2004, pp. 6-9. [ Links ]
Hirata, K., Takimoto, T., Tamura, K., Study on turning performance of a fish robot., Proceedings of the First International Symposium on Aqua biomechanisms, Japan, 2000, pp. 287-292. [ Links ]
Heo, S., Wiguna, T., Park, H. C., Goo, N. S., Effect of an artificial caudal fin on the performance of a biomimetic fish robot propelled by piezoelectric actuators., Journal of Bionic Engineering, Vol. 4, 2007, pp. 151-158. [ Links ]
Ho, T., Lee, S., Design of a multi-locomotion underwater robot., Advanced Materials Research, Vol. 488, 2012, pp. 1732-1736. [ Links ]
Hu, Y., Zhao, W., Xie, G., Wang, L., Development and target following of vision-based autonomous robotic fish., Robotica, Vol. 27, 2009, pp. 1075-1089. [ Links ]
Ijspeert, A. J., Crespi, A., Cabelguen, J. M., Simulation and robotics studies of salamander locomotion: Applying neurobiological principles to the control of locomotion in robots., Neuroinformatics, Vol. 3, 2005, pp. 171-195. [ Links ]
Kato, N., Control performance in the horizontal plane of a fish robot with mechanical pectoral fins., IEEE Journal of Oceanic Engineering, Vol. 25, 2000, pp. 121-129. [ Links ]
Kim, H. J., Song, S. H., Ahn, S. H., A turtle-like swimming robot using a smart soft composite (SSC) structure., Smart Materials and Structures, Vol. 22, No. 1, 2013. [ Links ]
Kodati, P., Hinkle, J., Winn, A., Deng, X., Microautonomous robotic ostraciiform (MARCO): Hydrodynamics, design, and fabrication., IEEE Transactions on Robotics, Vol. 24, 2008, pp. 105-111. [ Links ]
Kumph, J. M., Maneuvering of a robotic pike., a M. Sc. Thesis, presented at the Department of Ocean Engineering, Massachussets Institute of Technology, USA, 2000. [ Links ]
Lamas, M. I., Rodríguez, J. D., Rodríguez, C. G., González, P. B., Design aspects and two-dimensional CFD simulation of a marine propulsor based on a biologically-inspired undulating movement., Journal of Maritime Research, Vol. 7, 2010, pp. 73-88. [ Links ]
Lamas, M. I., Rodríguez, J. D., Rodríguez, C. G., CFD analysis of biologically-inspired marine Propulsors., Brodogradnja, Vol. 63, 2012, pp. 125-133. [ Links ]
Li, L., Yin, X., Experiments on propulsive characteristics of the caudal-fin models of carangiform fish in cruise., Journal of Experiments in Fluid Mechanics, Vol. 22, pp. 1-6, 2008. [ Links ]
Liu, J., Chen, W., Chen, Z., The effect of Caudal Fin's shape and Motion Parameters on Propulsion Velocity., Journal of High Technology, Vol. 4, pp. 86-88, 2001. [ Links ]
Liu, P., Bosse, N., Hydrodynamic characteristics of a lunate shape oscillating propulsor., Ocean Engineering, Vol. 26, 1999, pp. 519-529. [ Links ]
Long Jr, J. H., Koob, T., Schaefer, J., Summers, A., Bantilan, K., Grotmol, S., Porter, M., Inspired by sharks: A biomimetic skeleton for the flapping, propulsive tail of an aquatic robot., Marine Technology Society Journal, Vol. 45, 2011, pp. 119-129. [ Links ]
Low, K. H., Design, development and locomotion control of biofish robot with undulating anal fins., International Journal of Robotics and Automation, Vol. 22, 2007, pp. 88-99. [ Links ]
Low, K. H., Locomotion simulation and system integration of robotic fish with modular undulating fin., International Journal of Simulation, Vol. 7, 2008, pp. 64-77. [ Links ]
MacIver, M. A., Fontaine, E., Burdick, J. W., Designing future under-water vehicles: principles and mechanisms of the weakly electric fish., IEEE Journal of Oceanic Engineering, Vol. 29, 2004, pp. 651-659. [ Links ]
McIsaac, K. P., Ostrowski, J. P., Experiments in closed-loop control for an underwater eel-like robot., Proceedings of the IEEE International Conference on Robotics and Automation, 2002, pp. 750-755. [ Links ]
Morgansen, K., Geometric methods for modeling and control of a freeswimming carangiform fish robot., Proceedings of the Inter-national Symposium of Unmanned Untethered Submersible Technology, 2003. [ Links ]
Nakashima, M., Tsubaki, T., Ono K., Three-Dimensional Movement in water of the dolphin robot - Control between two positions by roll and pitch combination., Journal of Robotics and Mechatronics, Vol. 18, 2006, pp. 347-355. [ Links ]
Saimek, S., Li, P. Y., Motion planning and control of a swimming machine., Proceedings of American Control Conference, 2001, pp. 125-130. [ Links ]
Sfakiotakis, M., Lane, D. M., Davies, J. B. C., Review of fish swimming modes for aquatic locomotion., IEEE Journal of Oceanic Engineering, Vol. 24, 1999, pp. 237-252. [ Links ]
Shen, F., Wei, C., Cao, Z., Xu, D., Yu, J., Zhou, C., Implementation of a multi-link robotic dolphin with two 3-DOF flippers., Journal of Computational Information Systems, Vol. 7, 2011, pp. 2601-2607. [ Links ]
Siahmansouri, M., Ghanbari, S., Fakhrabadi, M. M. S., Design, implementation and control of a fish robot with undulating fins., International Journal of Advanced Robotic Systems, Vol. 8, 2011, pp. 61-69. [ Links ]
Sitorus, P. E., Nazaruddin, Y. Y., Leksono, E., Budiyono, A., Design and implementation of paired pectoral fins locomotion of labri-form fish applied to a fish robot., Journal of Bionic Engineering, Vol. 6, 2009, pp. 37-45. [ Links ]
Streitlien, K., Triantafyllou, G. S., Triantafyllou, M. S., Efficient foil propulsion through vortex control., The American Institute of Aeronautics and Astronautics Journal, Vol. 34, 1996, pp. 2315-2319. [ Links ]
Suleman, A., Crawford, C., Design and testing of a biomimetic tuna using shape memory alloy induced propulsion., Computers & Structures, Vol. 86, 2008, pp. 491-499. [ Links ]
Watts, C., Mc Gookin, E., Macauley, M., Biomimetic propulsion systems for mini-autonomous underwater vehicles., Proceedings of the IEEE Conference, Vancouver, 2007. [ Links ]
Versteeg, H. K., Malalasekera, W., An introduction to computational fluid dynamics: the finite volume method., 2nd ed., Harlow, Pearson Education, 2007. [ Links ]
Westphal, A., Rulkov, N. F., Ayers, J., Brady, D., Hunt, M., Controlling a lamprey-based robot with an electronic nervous system., Smart Structures and Systems, Vol. 8, 2011, pp. 39-52. [ Links ]
Wilbur, C., Vorus, W., Cao, Y., Currie, S. N., A lamprey-based undu-latory vehicle., Neurotechnology for Biomimetic Robots, 2002, pp. 285-296. [ Links ]
Xu, J. X., Niu, X. L., Ren, Q. Y., Modeling and control design of an anguilliform robotic fish., International Journal of Modeling, Simulation and Scientific Computing, Vol. 3, 2012. [ Links ]
Yamamoto, I., Terada, Y., Nagamatu, T., Imaizumi, Y., Propulsion system with flexible/rigid oscillating fin., IEEE Journal of Oceanic Engineering, Vol. 20, 1995, pp. 23-30. [ Links ]
Yu, J., Hu, Y., Fan, R., Wang, L., Kuzucu, A., Mechanical design and motion control of biomimetic robotic dolphin., Advanced Robotics, Vol. 21, 2007, pp. 499-513. [ Links ]
Yu, J., Hu, Y., Huo, J., Wang, L., Dolphin-like propulsive mechanism based on an adjustable Scotch yoke., Mechanism and Machine Theory, Vol. 44, 2009, pp. 603-614. [ Links ]
Zhang, Y. H., Song, Y., Yang, J., Low, K. H., Numerical and experimental research on modular oscillating fin., Journal of Bionic Engineering, Vol. 5, 2008, pp. 13-23. [ Links ]
