










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkRevista Colombiana de Cardiología
versión impresa ISSN 0120-5633
Rev. Colomb. Cardiol. v.18 n.4 Bogota jul./ago. 2011
(1) Grupo de Dinámica Cardiovascular - Universidad Pontificia Bolivariana. Medellín, Colombia.
(2) Grupo de Automática y Diseño - Universidad Pontificia Bolivariana. Medellín, Colombia.
(3) Grupo Gaunal - Universidad Nacional de Colombia. Medellín, Colombia.
(4) The Foundation for Cardiac Surgery Development. Zabrze, Polonia.
Correspondencia: Dr. John Bustamante O. Grupo de Investigación Dinámica Cardiovascular, Circular 1 No. 70-01 Bloque 7. Piso 1, Universidad Pontificia Bolivariana, Medellín, Colombia. A.A.: 56006, Tel.: (57-4) 4 48 83 88 ext. 9810.
Recibido: 08/06/2010. Aceptado: 01/12/2010.
INTRODUCCIÓN: los procedimientos de cirugía cardiotorácica mínimamente invasiva (MICS, su sigla en Inglés) buscan reducir las complicaciones de las grandes disecciones. No obstante, ante la falta de contacto directo con el tejido por parte del cirujano, éste recibe una sensación parcial de tacto y fuerza, lo que puede originar errores de procedimiento, inadecuada fuerza aplicada al tejido y fatiga durante el acto quirúrgico. La inclusión de dispositivos robóticos con la técnica MICS ha potencializado las habilidades del cirujano para la manipulación de los tejidos, y aunque los desarrollos del mercado no cuentan aún con retroalimentación táctil, se trabaja en prototipos robóticos que incorporan realimentación de fuerza y torque.
OBJETIVO: proponer las condiciones y restricciones relacionadas con la incorporación de realimentación de fuerza y torque en MICS robótica, aplicables a diferentes configuraciones de manipuladores, y analizar la implementación de dichas condiciones en un simulador quirúrgico.
MATERIAL Y MÉTODOS: partiendo del análisis de necesidades durante procedimientos cardiotorácicos y las condiciones de cirugía mínimamente invasiva, se identificaron los requerimientos para garantizar reflexión de fuerza y se realizó un análisis matemático de dichas consideraciones. Finalmente, se verificaron los análisis matemáticos mediante técnicas de modelización y simulación utilizando la plataforma computacional Matlab®.
RESULTADOS: se argumentaron tres tipos de consideraciones: a) Cinemático: la existencia de un punto fijo, las formas de garantizarlo durante procedimientos MICS robóticos, y las trayectorias de movimiento que el manipulador sigue en aplicaciones de cirugía cardiotorácica; b) Dinámico: la repercusión de fuerzas externas en el manipulador y la manera de considerarlas en el desarrollo de controladores que permitan al cirujano percibir una sensación de contacto con el tejido; c) Sensorial: requerimientos de los sensores de fuerza y relación necesaria entre el número de sensores y actuadores para realimentar fuerza en MICS robótica. Posteriormente se implementaron dichas consideraciones en un simulador y se verificó el cumplimiento de las mismas.
CONCLUSIONES: las condiciones relacionadas con la incorporación de un sensor de fuerza y la percepción del cirujano en cuanto al tacto y la fuerza aplicada, resultan ser importantes en procedimientos de MICS robótica y requiere la inclusión de un sistema de control que permita la optimización de procedimientos por telepresencia.
PALABRAS CLAVE: cirugía mínimamente invasiva, cirugía robótica cardiotorácica.
INTRODUCTION: the procedures in minimally invasive cardiothoracic surgery (MICS) aim to reduce the complications of major dissections. However, in the absence of direct contact of the surgeon with the tissue, he receives a partial sense of touch and strength, which can lead to procedural errors, inadequate force applied to the tissue and fatigue during surgery. The inclusion of robotic devices with the MICS technique has enhanced the technical skills of the surgeon to manipulate tissue, and although the market devices still do not have tactile feedback, research in robotic prototypes that incorporate feedback of force and torque is being done.
OBJECTIVE: to propose the conditions and restrictions related to the integration of force and torque feedback in robotics MICS applicable to different configurations of manipulators and analyze the implementation of those conditions in a surgical simulator.
MATERIAL AND METHODS: from the analysis of needs during cardiothoracic procedures and conditions of minimally invasive surgery, we identified the requirements to ensure reflection of force and performed a mathematical analysis of such considerations. Finally, mathematical analysis were verified by modeling and simulation techniques using the Matlab® computing platform.
RESULTS: three types of considerations were argued: a) Kinematic: the existence of a fixed point; the way to guarantee it for robotic MICS procedures, and the trajectories of motion followed by the controller in the applications of Cardiothoracic Surgery, b) Dynamic: the impact of external forces on the manipulator and the way to consider them in the development of controllers that allow the surgeon to feel a sense of contact with the tissue, c) Sensory: requirements of the force sensors and necessary relationship between the number of sensors and actuators to feedback force in MICS robotics. Subsequently these considerations were implemented in a simulator and were checked for compliance.
CONCLUSIONS: the conditions related to the incorporation of a force sensor and the perception of the surgeon in terms of touch and force applied turns out to be important in robotics MICS procedures and requires the inclusion of a control system that enables the optimization of telepresence procedures.
KEYWORDS: minimally invasive surgery, robotic cardiothoracic surgery.
Introducción
Los procedimientos de cirugía cardiotorácica mínimamente invasiva (MICS: Minimally Invasive Cardiac Surgery) presentan ventajas para el cirujano:
a. Evitan la esternotomía y la separación de las costillas para acceder a la cavidad torácica.
b. Reducen el riesgo de infección y la pérdida de sangre.
c. Reducen a pequeños orificios las grandes cicatrices resultado de la cirugía abierta.
d. Minimizan el tiempo de recuperación (pasa a ser de días para el caso de MICS) que suele ser de varias semanas para la cirugía abierta, con la reducción de complicaciones intrahospitalarias y de costos al sector salud.
e. Aminoran el riesgo de complicaciones asociadas con el sistema de circulación extracorpórea, tales como accidente cerebro-vascular, complicaciones pulmonares, renales, entre otras.
Sin embargo, los procedimientos MICS cuentan con algunas limitaciones para el personal médico, como problemas de visualización, restricciones de movimiento y sensación de fuerza y tacto restringidos. El uso de sistemas de realimentación visual genera desventajas porque crea un campo visual reducido, pérdida de la coordinación manual-visual y carencia de la tridimensionalidad de la imagen. Las restricciones en el movimiento del instrumental quirúrgico por la disposición de las manos del cirujano, son el resultado de la existencia de un punto fijo sobre la piel del paciente alrededor del cual se mueven los instrumentos, permitiendo cuatro grados de libertad dentro del cuerpo y limitando la movilidad del operador. De acuerdo con lo anterior, no es posible alcanzar cualquier punto con cualquier orientación dentro del espacio tridimensional de trabajo.
Finalmente, se presentan problemas hápticos (aquellos que involucran fuerza, torque y percepción táctil como textura, vibraciones, entre otros), porque no es posible tener un contacto directo con el tejido y como consecuencia del uso de instrumentos largos y trocares en esta práctica, se reduce la realimentación háptica, amplificando incluso el temblor de las manos del cirujano (1-3).
La inclusión de sistemas robóticos en cirugía ha permitido subsanar algunas de estas desventajas logrando, por ejemplo, la disminución del temblor de las manos del cirujano, la incorporación de algoritmos de control para contar con diferentes escalas de trabajo y la visualización de una imagen tridimensional por parte del operario, todo lo cual potencializa las habilidades del profesional de la salud (4-7). Sin embargo, los problemas hápticos no han sido resueltos y continúan presentándose tanto para la MICS como para la cirugía cardiotorácica robótica mínimamente invasiva (MIRCS: Minimally Invasive Robotic Cardiac Surgery).
La incursión de los sistemas robóticos en cirugía se ha dado bajo dos modalidades. La primera de ellas es la cirugía robótica, procedimiento en el cual previamente se programa un robot para la realización de algunas tareas específicas y limitadas dentro del acto quirúrgico (8). La otra modalidad corresponde a la cirugía a distancia o telecirugía, en la cual el cirujano trabaja simultáneamente con un robot que reproduce los procedimientos que él realiza utilizando una estructura conocida como sistema maestro-esclavo, con dos zonas claramente definidas:
a. Zona local: en la cual el cirujano está en contacto con un dispositivo manipulador robótico maestro.
b. Zona remota: en la cual se encuentra un dispositivo robótico esclavo que repite los movimientos del maestro y tiene contacto con los tejidos del paciente (9, 10).
En la actualidad, los procedimientos que más se practican en aplicaciones cardiotorácicas son el tratamiento de la enfermedad coronaria, el prolapso de la válvula mitral y el defecto septal atrial, que son realizados por el dispositivo robótico DaVinci (11), el único sistema robótico para aplicaciones en MIRCS con certificación para uso en varios países de Europa, Estados Unidos, América Latina y Asia.
La inexistencia de la realimentación háptica es una desventaja, tanto para MICS como para MIRCS, ya que trae diversos inconvenientes para el cirujano. Específicamente la ausencia de realimentación de fuerza, objeto del presente trabajo, tiene múltiples inconvenientes, entre los cuales se mencionan los siguientes:
a. El cirujano en algunas ocasiones toma decisiones con algún retardo respecto al acto quirúrgico, porque visualiza la interacción con el tejido en un monitor pero no percibe dicha interacción en sus manos.
b. El cirujano aplica una mayor fuerza durante el contacto con el tejido al realizar las disecciones.
c. Mayor tiempo en la práctica del procedimiento.
d. Mayor fatiga del cirujano (12).
En la búsqueda de soluciones a los inconvenientes presentes en estos dispositivos maestro-esclavo en diversas aplicaciones, el tema de realimentación de fuerza ha tomado auge a nivel mundial, y específicamente en el área de cirugía mínimamente invasiva se han realizado trabajos experimentales para incorporar realimentación de fuerza a manipuladores específicos desarrollados para estos propósitos y a la adaptación de manipuladores comerciales (13, 14).
En este trabajo se proponen las condiciones y restricciones que existen para la incorporación de la realimentación de fuerza y torque en procedimientos de MIRCS, aplicables a diferentes configuraciones de manipuladores, y se implementan dichas condiciones en un simulador quirúrgico. Concretamente se proponen consideraciones de tipo cinemático, dinámico y sensorial para garantizar que la fuerza de contacto entre el instrumental quirúrgico y el tejido en cirugía cardiotorácica sea percibida correctamente por el cirujano.
Con esta propuesta se pretende realizar un modelo e incluir algoritmos de control dentro del análisis, procurando la transparencia en la reflexión de fuerza, es decir, buscando que el cirujano perciba la fuerza del tejido viscoelástico como si estuviera en contacto directo con él, excluyendo los efectos físicos que produce la interacción con los sistemas robóticos dentro del procedimiento quirúrgico.
Materiales y métodos
El trabajo se llevó a cabo en cuatro fases:
1. Identificación de las características comunes en los procedimientos de MIRCS.
2. Identificación de las condiciones y restricciones en los procedimientos MIRCS: a partir de la información se extraen las condiciones y restricciones que debe cumplir un modelo generalizado para buscar la realimentación de torque y fuerza.
3. Restricciones matemáticas: se realiza la representación de las restricciones planteadas en un lenguaje matemático, transformable en un modelo generalizado.
4. Verificación: se verifican las restricciones por medio de técnicas de simulación en la plataforma Matlab®.
Consideraciones éticas
El trabajo se enfoca en la identificación de las restricciones en el desarrollo de un modelo generalizado para realimentación de fuerza y torque en MIRCS. Esto hace referencia a análisis matemáticos y físicos que incluyen aspectos metodológicos mediante técnicas de simulación que no involucran estudios clínicos. De esta forma, el trabajo no contempló intervención en animales ni en humanos.
Resultados y discusiónLas condiciones y restricciones identificadas en el proceso de realimentación de fuerza y torque para MIRCS, fueron agrupadas en tres categorías: cinemáticas, dinámicas y sensoriales.
Consideraciones cinemáticas
Existencia de un punto fijo
Desde la práctica de los procedimientos MICS convencionales se busca garantizar un punto fijo de entrada al campo operatorio o fulcrum, que generalmente se crea mediante la utilización de un trocar. El uso de este punto obliga a que el operador invierta los movimientos de la mano, resultando en movimientos contra-intuitivos y la necesidad de aplicar mayor fuerza debido a la resistencia de contacto y amplificación del temblor de sus manos.
En los MIRCS se debe garantizar este punto fijo para evitar movimientos no deseados por parte del dispositivo robótico y así proporcionar mayor seguridad al paciente y confort en el trabajo del cirujano.
Se implementaron dos maneras de crear y garantizar la existencia del punto fijo o punto de incisión en manipuladores robóticos para aplicaciones cardiotorácicas: por programación o por configuración mecánica del sistema.
1. Programación: se realizaron rutinas de programación que crean restricciones de movimiento para el manipulador, de tal forma que aunque físicamente éste pueda realizar movimientos sin involucrar un punto fijo, al comandar el sistema a través del programa computacional, sus movimientos siempre garantizarán el paso por el punto de incisión. Si bien este procedimiento no es muy usual en el momento de hacer la implementación, puede ser útil para hacer pruebas simuladas de los sistemas.
2. Configuración mecánica del sistema: esta es la alternativa más usual en los dispositivos disponibles en el mercado. En este trabajo se implementaron y simularon tres maneras de garantizar el punto fijo:
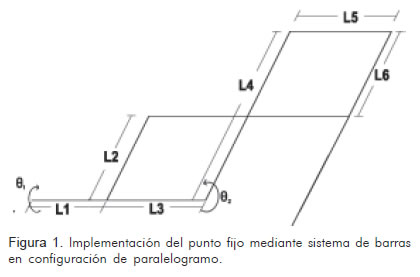
a. Configuración en paralelogramo, conformada por seis barras o eslabones y ocho articulaciones (Figura 1); se garantiza el punto fijo porque simula el movimiento de una articulación esférica, y en este caso la orientación de la barra que tiene contacto con el instrumental quirúrgico siempre está orientada hacia dicho punto.
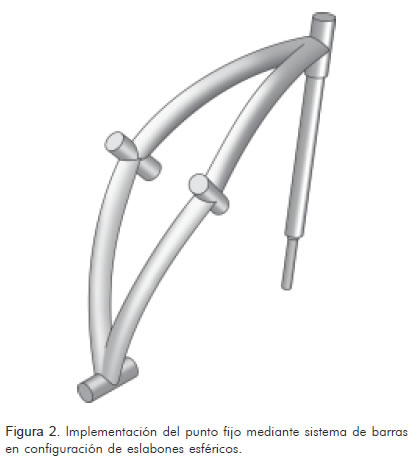
b. Configuración con eslabones esféricos, en la cual los eslabones son arcos con el mismo radio, donde todos los ejes pasan a través de un punto central, que es el punto de incisión. Pueden ser diseñados con cinco barras (Figura 2).
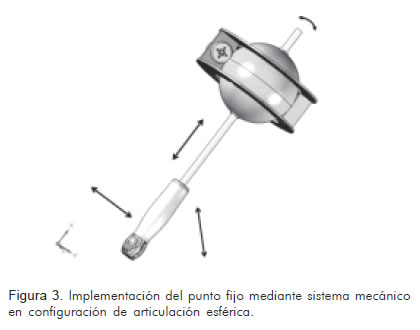
c. Configuración con articulaciones esféricas donde la herramienta pasa a través del centro de la articulación y luego por el punto de incisión (Figura 3).
Trayectorias de movimiento
Los procedimientos quirúrgicos considerados en estas técnicas involucran algunas restricciones en los movimientos del cirujano para garantizar el seguimiento de precisión requerido. De acuerdo con la técnica quirúrgica de los procedimientos de MICS, las trayectorias de movimientos posibles se pueden agrupar en las siguientes trayectorias parciales:
- Círculos en un plano.
- Trayectoria recta con cambio brusco de trayectoria.
- Trayectoria en tres dimensiones.
Consideraciones dinámicas
Controlador
El objetivo del controlador en un sistema de reflexión de fuerza para MIRCS, es permitir que el cirujano perciba la sensación de contacto con el tejido de la forma más realista posible. Para lograr este objetivo se deben eliminar algunos efectos existentes en la interacción cirujano-maestro-esclavo-tejido. Se identificaron los siguientes efectos susceptibles de eliminación en el diseño del controlador:
- Efectos gravitacionales, por la acción de la fuerza de gravedad en cada uno de los dispositivos robóticos involucrados.
- Fricción entre los diferentes componentes del sistema.
- Backlash de los motores.
Adicionalmente, se deben considerar las perturbaciones en el sistema, teniendo en cuenta si son fuerzas ocasionadas por el tejido u órgano al tener contacto con el instrumental durante el procedimiento, o si se trata de fuerzas inherentes al sistema pero no están consideradas en el modelo del mismo. Ambas se pueden tener en cuenta, pero debe darse prioridad a aquellas que definen la dinámica del controlador. Generalmente, se considera la primera de las clasificaciones y se tienen en cuenta: característica de la perturbación, manera de eliminarla, tipo de control de acuerdo con el tipo de perturbaciones y diseño del controlador.
Si bien ninguno de los efectos mencionados anteriormente puede ser eliminado por completo en la realidad, ha sido posible minimizarlos por medio de técnicas de control que proveen acciones correctivas ante los efectos de una señal de perturbación.
Consideraciones sensoriales
Requerimientos de los sensores
Existen diferentes tipos de sensores para uso en MIRCS. Básicamente pueden ser sensores de posición, velocidad, aceleración, torque y fuerza.
1. Sensores de posición, velocidad y aceleración.
No se consideran restricciones importantes desde el punto de vista del sensor de posición porque en estas técnicas se trabaja a bajas velocidades y en este entorno no existen limitaciones para este tipo de aplicaciones.
Para el cálculo de la velocidad y de la aceleración se procede de dos formas: se adquieren los datos de posición y se encuentra la primera derivada de la posición, y a partir de allí se determina la velocidad (esto es, hacerlo por hardware) o se ubican sensores de velocidad para que sensen la velocidad directamente. En la aplicación específica de realimentación de fuerza y torque, la medición de velocidad no es tampoco una restricción.
Algo similar sucede con la variable aceleración, la cual se calcula de dos maneras: como la doble derivada, de la posición respecto al tiempo o la derivada de la velocidad respecto al tiempo; si es por hardware, se calcula ubicando acelerómetros en el sistema. Estas alternativas no tienen restricciones porque se trabaja con un manipulador rígido.
2. Sensores de torque y fuerza.
Diferente sucede con la medición de fuerza. Para ubicar un sensor en la punta del efector final durante un procedimiento de MIRCS y garantizar una medición directa de la fuerza y el torque, deben cumplirse las siguientes condiciones:
a. Contar con biocompatibilidad.
b. Ser resistente a la humedad y la corrosión.
c. Poseer un diámetro menor de 10 mm para garantizar la ubicación en la punta del manipulador.
d. Ser esterilizable o lo suficientemente económico para ser desechable.
En la actualidad existen restricciones tecnológicas en este sentido, por lo que no ha sido posible construir sensores que cumplan con estas especificaciones. Empresas como ATI (15) han logrado algunas aproximaciones con sus productos nano 43, por el sensor JR3 (16), o por otros desarrollos (17, 18); sin embargo, aún no se cumplen todos los requerimientos para una aplicación invasiva en seres humanos.
Para compensar esta restricción, se propuso abordar el problema desde el análisis del sistema bajo marcos de referencia ubicados en los puntos de interés (punto de posicionamiento del sensor real y punta del instrumental quirúrgico). A continuación se realizan transformaciones de un marco a otro, que incluyen los efectos cinemáticos y dinámicos, para conocer la medida del sensor ubicado en cualquier punto del instrumental quirúrgico, como si estuviera ubicado en la punta de dicho instrumental. De esta manera se pueden realizar mediciones sin perturbaciones, se reducen costos y disminuyen un tanto las exigencias de esterilidad puesto que el sensor no queda ubicado en un posicionamiento invasivo.
Simetría en el sistema maestro-esclavo
Se debe garantizar que el número de sensores del esclavo concuerde con el número de actuadores en el maestro, trabajando en los mismos ejes de actuación. Esta es una condición para lograr la reflexión de las medidas adquiridas en todos los ejes del manipulador robótico esclavo.
Verificación mediante técnicas de simulación
Se implementó un programa de simulación bajo la plataforma Matlab® y se verificaron las consideraciones en mención:
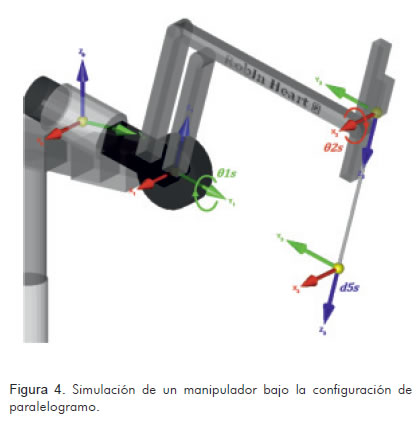
Manipulador de configuración paralelogramo
La figura 4 muestra la simulación de un manipulador bajo la configuración paralelogramo. Permite realizar los movimientos en los diferentes grados de libertad del manipulador y verificar la existencia del punto fijo.
Manipulador bajo la configuración de eslabones esféricos
Teniendo en cuenta la trayectoria que debe seguir un simulador de eslabones esféricos se analizó y verificó la existencia del punto fijo y las trayectorias que sigue cuando se realiza el movimiento para grados de libertad independientes.
Manipulador bajo la configuración de articulación esférica
A través de los desarrollos realizados en convenio con The Foundation for Cardiac Surgery Development (FCSD), se ha demostrado la existencia del punto fijo en este tipo de configuración. En esta institución se ha implementado un sistema maestro de un manipulador robótico que utiliza la articulación esférica para aplicaciones en telecirugía. Se han realizado pruebas con personal quirúrgico, las cuales han sido satisfactorias en cuanto a la ergonomía y la conservación del punto fijo.
Conclusiones
El control de trayectorias de movimiento ha permitido la ejecución de los distintos procedimientos que se realizan por medio de la cirugía cardiotorácica robótica mínimamente invasiva.
La restricción de punto fijo se puede garantizar por medio de configuraciones mecánicas y por programación. Ambas modalidades implican la formulación de ecuaciones para desarrollar los modelos matemáticos.
La simetría maestro-esclavo es una de las condiciones importantes en la búsqueda de la realimentación de fuerza maestro-esclavo. El controlador debe eliminar las no linealidades del sistema y garantizar una respuesta háptica fiel.
Agradecimientos
Los autores expresan su agradecimiento a los ingenieros César Medina y Daniel Ruiz, por su vinculación en distintas fases del proyecto. De igual manera, agradecen a The Foundation for Cardiac Surgery Development (FCSD) por su apoyo.
Bibliografía
1. Faraz A, Payandeh S. Engineering approaches to mechanical and robotic design for minimally invasive surgeries. Massachusetts: Kluwer Academic Publishers; 2000. [ Links ]
2. Preusche C, Ortmaier T, Hirzinger G. Teleoperation concepts in minimal invasive surgery. Control Engineering Practice 2002; 10: 1245-50. [ Links ]
3. Ortmaier TJ. Motion Compensation in Minimally Invasive Robotic Surgery. Munich: Technischen Universität München. Ingineering Department; 2002. [ Links ]
4. Novick RJ, Fox SA, Kiaii BB, et al. Analysis of the learning curve in telerobotic, beating heart coronary artery bypass grafting: a 90 patient experience. The Annals of Thoracic Surgery 2003; 76: 749-53. [ Links ]
5. Savitt MA, Gao G, Furnary AP, Swanson J, Gately HL, Handy JR. Application of robotic-assisted techniques to the surgical evaluation and treatment of the anterior mediastinum. Ann Thorac Surg 2005; 79: 450-5. [ Links ]
6. Hanly EJ, Talamini MA. Robotic abdominal surgery. The American Journal of Surgery 2004; 188: 19-26. [ Links ]
7. Bodner J, Wykypiel H, Wetscher G, Schmid T. First experiences with the da Vinci(TM) operating robot in thoracic surgery. Eur J Cardio-Thorac Surg 2004; 25: 844-51. [ Links ]
8. Dupeyrat AC, Ballantyne GH. Sistemas quirúrgicos robóticos y telerobóticos para cirugía abdominal. Rev Gastroenterol Perú 2003; 23: 58-66. [ Links ]
9. Camarillo DB, Krummel TM, Salisbury J, Kenneth J. Robotic technology in surgery: past, present, and future. Am J Surg 2004; 188: 2-15. [ Links ]
10. Patel K. Robotics the future of surgery. Int J Surg 2008; 6: 441-2. [ Links ]
11. Intuitive Surgical, Inc. {On line}. 2005. (Accessed 31 Jan. 2007). Disponible en: http://www.intuitivesurgical.com/index.aspx) [ Links ]
12. Wagner CR, Stylopoulos N, Howe RD. The role of force feedback in surgery: analysis of blunt dissection. In: Proceedings of the 10th Symp. On Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS'02); Orlando, Florida 2002. p. 68-74. [ Links ]
13. Tavakoli M, Patel RV, Moallem M. A Force Reflective Master-Slave System for Minimally Invasive Surgery. Proceedings of the 2003 IEEElRSl International Conference on Intelligent Robots and Systems. Las Vegas Nevada; 2003. p 3077-82. [ Links ]
14. Schirmbeck EU, Habelbeck C, Mayer H, et al. Evaluation of haptic in robotic heart surgery. International Congress Series 2005; 1281: 730-4. [ Links ]
15. ATI Industrial Automation. Robotic End Effectors and Automation Tooling. [On line] 2009. [Accessed 10 feb. 2007]. Disponible en: http://www.ati-ia.com. [ Links ]
16. JR3 Inc. [On line] 2008. [Accessed 15 April 2009], Disponible en: <http://www.jr3.com/index.html>. [ Links ]
17. Peirs J, Clijnen J, Reynaerts D, et al. A micro optical force sensor for force feedback during minimally invasive robotic surgery. Sensors and Actuators A. Physical 2004; 115: 447-55. [ Links ]
18. Seibold U, Kuebler B, Weiss H, Ortmaier T, Hirzinger G. Sensorized and actuated instruments for minimally invasive robotic surgery. Muchich, Germany EuroHaptics 2004. p. 482-485. [ Links ]

