











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
PermalinkINTRODUCCIÓN
La discapacidad ocasiona una afectación en la calidad de vida y restricciones de acceso a la educación1. Es bien conocido que los niños con discapacidad, generalmente tienen dificultades en su salud, bajo rendimiento educativo, menos oportunidades económicas y mayor pobreza en su adultez frente a personas sin discapacidad; como asegura la OMS2. En consecuencia, se puede señalar una problemática económica y social denominada: “Costo de la discapacidad”3)-(4.
La robótica es un campo de la ingeniería que puede contribuir a solucionar esta problemática. Este campo ha sido desarrollado ampliamente y está siendo aplicado en gran diversidad de escenarios y campos de acción humanos, tal como ha venido ocurriendo en el campo de la rehabilitación5)-(6. Fundamentalmente, con el fin de mejorar de manera significativa la calidad de vida de pacientes y asistir importantes tareas como: Intervenciones quirúrgicas7)-(8 de todo tipo lo que incluye la microcirugía9, rehabilitación del accidente cerebro vascular10)-(11 y cognitiva12, rehabilitación motora13) de pacientes que han sufrido accidentes de miembros superiores14)-(15, asistencia robótica para diferentes tareas16, adecuación de ambientes inteligentes para viviendas de personas con discapacidad17 o para adultos mayores18.
Actualmente existen múltiples artículos de revisión sistemática de literatura en el campo de rehabilitación robótica19. Asimismo, hay una gran cantidad de sistemas robóticos para la rehabilitación del miembro superior que permiten realizar terapias mediante tareas repetitivas en entornos controlados, que asociados a software especializado de carácter lúdico permiten mantener una alta motivación del paciente. Sin embargo, hay pocos desarrollos para población infantil y aún falta por explorar y documentar de forma sistemática este campo. Debido a esto, este trabajo es muy importante porque mediante la síntesis observacional y retrospectiva de múltiples investigaciones, brindará información que permita actualizar a nuevos investigadores en el campo de la rehabilitación robótica de pacientes pediátricos, y ser un punto de partida para realizar trabajos futuros. Aunque se trató de seleccionar los artículos más citados, es muy claro que otra cantidad de artículos han sido omitidos debido a la amplia bibliografía en el tema. Por lo tanto, el objetivo de este artículo es presentar una revisión del estado de las tecnologías de asistencia y sus aplicaciones para la rehabilitación del miembro superior de niños que se encuentran en condición de discapacidad.
Debido al escaso número de aplicaciones para niños, algunas que han sido desarrolladas para adultos se están utilizando también con población infantil; como son: AMADEO®(20),(21, PABLO®(22, DIEGO®, pediatric ARMEO®(23 spring, el sistema YouGrabber24 y el sistema pediátrico interactivo basado en realidad virtual PITS25) “Pediatric Interactive Therapy System” por sus siglas en inglés. En general, las primeras aplicaciones en niños tenían el propósito de estudiar la interacción con terapias asistidas por robots26)-(27, con el fin de observar la aceptación por parte del paciente y el terapeuta. Por ejemplo, en el año 1988 Cook, et al.28 desarrollaron un sistema que permitió explorar el ambiente por parte de niños discapacitados usando un brazo robot. Albert Cook29 ha sido uno de los investigadores más prolíferos en este campo con múltiples trabajos reportados en la literatura30)-(31 como son: Proyectos orientados a la asistencia en tareas cotidianas32)-(33, el juego34)-(35 e interacción con un robot en el aprendizaje de niños con discapacidad física severa36. También, el mismo año Harwin, et al.27 desarrollaron un sistema basado en un robot de bajo costo y un sistema de visión artificial para ejecutar tareas educativas, donde se observó la motivación por el uso del robot y el aumento de la capacidad de hacer tareas imposibles sin este.
Por otro lado, el artículo se encuentra distribuido de la siguiente manera. En el Marco teórico se abordan aspectos conceptuales de la ingeniería de rehabilitación. En la metodología, se presenta brevemente el protocolo para la búsqueda de artículos, algunas técnicas y métodos. En los Resultados y discusión se describen brevemente los avances más significativos y se hace una discusión de las diferentes aplicaciones, Proyecciones de la ingeniería de rehabilitación, conclusiones y referencias bibliográficas.
MARCO TEÓRICO
La Robótica
La asociación de industrias robóticas de Estados Unidos define robot como: “Manipulador reprogramable y multifuncional designado para manipular material, partes, herramientas o dispositivos especializados a través de movimientos variables programados para el desempeño de gran variedad de labores”5. Karel Capek, introdujo el término “Robot” por primera vez en 1921, en una obra teatral denominada Rossum’s universal Robots (en español: “los robots universales de Rossum”). Donde describió máquinas inteligentes que aunque se crearon para servir a los humanos, dominaban el mundo y destruían la humanidad37. Desde ese entonces hasta el presente, esa idea ha evolucionado bastante y vemos el gran avance en la concepción e implementación de la robótica, como lo es en terapias de rehabilitación.
Lesiones del miembro superior
La ocurrencia de defectos congénitos en miembros superiores se estima que sea de un 0.3 a 1.0 por cada 1000 nacimientos. Debido a esto, la lesión congénita más común es la transradial de miembro izquierdo, y ocurre en un 40% de los casos38. Las causas de las lesiones congénitas de miembros superiores son poco conocidas. Sin embargo, a diferencia de las lesiones ocasionadas por defectos congénitos, se conoce que la parálisis cerebral (PC) es la principal causa de discapacidad en niños, lo que afecta directamente el miembro superior39)-(40. Es importante mencionar que las lesiones congénitas normalmente no son susceptibles de intervención con robótica, esto se debe a la insuficiencia de funciones motoras en el paciente, como es el caso del miembro superior, donde se pueden presentar ángulos de movilidad articular insuficientes o dificultad para acoplarse a los diferentes módulos del sistema. Antes de la participación de un paciente en terapias del miembro superior, se debe evaluar si sus rangos de movilidad articular podrían servir para lograr los objetivos de la terapia. Por el contrario, las lesiones del miembro superior adquiridas en periodo perinatal o posterior, sí podrían ser tratadas con tecnologías robóticas.
Ingeniería de rehabilitación
La ingeniería de rehabilitación puede ser definida como: “La aplicación de soluciones tecnológicas a los diferentes problemas que podrían enfrentar en la cotidianidad personas con discapacidad”. En la actualidad, como resultado del acelerado avance en tecnologías para rehabilitación aplicadas en terapias; se puede proponer el concepto: Nuevas Tecnologías en Rehabilitación.
Las terapias usadas frecuentemente en niños se componen de movimientos repetitivos, orientados por un terapeuta con el fin de resolver una serie de tareas, para la adquisición de habilidades motoras. Debido a esto, y mediante la aplicación de la ingeniería de rehabilitación se puede complementar las sesiones de terapias, y de esta manera ser más motivantes. Por otro lado, la rehabilitación robótica frente a la rehabilitación tradicional presenta ventajas y desventajas como se presenta en la Figura 1. La rehabilitación tradicional puede aumentar considerablemente el estrés del niño por asistir al médico, y muchas veces no aplica a sus necesidades; además, es insuficiente para la rehabilitación motora intensiva. Asimismo, la rehabilitación robótica tiene como desventaja el preconocimiento, donde el operador del sistema debe llegar a tener conocimientos de programación y electrónica. Además, muchas veces se pueden presentar limitaciones por la disponibilidad del hardware, lo que no sucede en la rehabilitación tradicional. Otra desventaja es el cierto grado de inseguridad por lesiones mecánicas.

FIGURA 1 Ventajas y desventajas de la rehabilitación robótica (RR) frente a la rehabilitación tradicional (RT).
Por el contrario, las ventajas de la rehabilitación robótica son: Mayor relación costo-eficacia y mayor efectividad de las terapias que se aplican originando nuevas alternativas de rehabilitación. Esto es muy importante, por ejemplo daría la posibilidad a niños que tienen discapacidades severas, de desarrollar habilidades cognitivas 3 en el proceso. Las nuevas tecnologías en rehabilitación brindan la posibilidad de reducir el uso de los dispositivos tradicionales, además de aumentar las capacidades del paciente, y provee nuevas formas de asistencia; en general, mejora el proceso global de su rehabilitación. Sin embargo, a medida que la población crece y las tecnologías se hacen más conocidas, se hace necesario incrementar la versatilidad de los dispositivos usados para suplir las nuevas demandas.
METODOLOGÍA
Métodos y criterios de Búsqueda
Se buscaron artículos publicados hasta el mes de mayo de 2016 utilizando los motores de búsqueda de las bases de datos SCIENCE DIRECT, SCOPUS, EBSCO, SPRINGER LINK, RESEARCH GATE, IEEE Xplore, TAYLOR & FRANCIS. Las palabras claves utilizadas para la búsqueda electrónica fueron “Rehabilitation therapies for children”, “Upper limb rehabilitation therapies”, “Children rehabilitation robotics” y “Rehabilitation robotics”. La búsqueda realizada se limitó a estudios con niños que sufrieran de lesión del miembro superior. También se tuvieron en cuenta estudios que incluyeran la evaluación de dispositivos de comunicación aumentada, la interacción y el aprendizaje con robots para el desarrollo cognitivo.
Criterios de elegibilidad de los estudios
Se hizo una revisión del estado presente de este campo de investigación que ha sido reportado en la literatura, principalmente tratándose de una revisión de publicaciones de los últimos 30 años. Se revisaron artículos en inglés o español, que correspondieran a estudios pediátricos culminados o algunos que aún se encuentran en fase de desarrollo. Debido a que no se conoce aún una revisión bibliográfica para rehabilitación robótica infantil del miembro superior, algunos artículos de revisiones de rehabilitación robótica sirvieron de referencia. Principalmente, se trató de enfocar a niños hasta los 14 años; sin embargo, debido a la gran dificultad de encontrar investigaciones hechas y reportadas en la literatura enfocadas a población infantil, se debió revisar estudios que incluían jóvenes de edades hasta los 19 años, y extraer la información útil. Además, se verificó que estos estudios incluyeran información metodológica sobre los criterios de inclusión (edad, diagnostico, habilidades, nivel de desarrollo motor y cognitivo), protocolo de terapia, duración de la terapia, escalas funcionales de evaluación y métodos de análisis de la información.
Análisis de los estudios
Según el tipo de aplicación estudiada, la rehabilitación robótica podría verse desde dos enfoques: 1) Rehabilitación con robots terapéuticos y 2) Asistencia al paciente en tareas de la vida cotidiana41 mediante robots. Algunas aplicaciones importantes de la rehabilitación robótica reportadas en la literatura revisada son: Aplicaciones de monitoreo con realimentación del movimiento en terapias14, estrategias para la recuperación motora de pacientes que han sufrido un accidente cerebro vascular42, implementación de computadores para lograr aplicaciones de realidad virtual43 y robots sociales44)-(45; así como, sistemas de rehabilitación del miembro superior46)-(47
Es bien conocido que el grado de discapacidad presente en un paciente puede ser bastante severo. Debido a esto, se deben presentar alternativas que permitan la comunicación con los sistemas robóticos. A estos dispositivos o sistemas se les denomina tecnologías de acceso (comunicación aumentada), y se encargan de traducir los deseos del paciente manifestados mediante un movimiento físico, gesto facial, cambio psicológico o diferentes combinaciones con el fin de obtener una actividad funcional. Las tecnologías de acceso abarcan principalmente dos elementos que son: 1) Ruta de acceso, es decir los sensores y dispositivos de entrada (botones, joystick, teclado etc). 2) Unidad de procesamiento de la señal. De esta manera, Natasha Alves y colaboradores48, han propuesto 5 métodos de acceso a la comunicación para pacientes con discapacidades severas. Las diferentes tecnologías propuestas se presentan en la Figura 2.
Asimismo, los dispositivos de rehabilitación robótica estudiados se diseñaron en función de aspectos como: Tipo de discapacidad, tecnología de acceso a la comunicación, el tipo de tecnología implementada, nivel de contacto entre paciente y robot, cuan inteligente o avanzado debe ser el sistema de rehabilitación robótica. En síntesis, con el fin de construir un sistema de rehabilitación robótica, se deben involucrar cinco aspectos:
1) Determinar los componentes mecánicos y electromecánicos teniendo en cuenta la seguridad del paciente.
2) Determinar los componentes electrónicos como: Sensores, procesadores, transductores e interfaces de comunicación.
3) Determinar criterios de inclusión como: El tipo de discapacidad, edad y habilidades cognitivas y motrices.
4) Programación del sistema robótico para su control. Se debe tener en cuenta que debe ser lo más automatizado e inteligente posible en términos tecnológicos.
5) Determinar el nivel de contacto entre paciente y robot. Es decir, si el robot va a operar con la aplicación de fuerza del paciente, o no tendrá contacto con este.
La importancia del debate tecnológico en los estudios incluidos acerca de las técnicas y métodos usados, se centra en cuan inteligentes y avanzadas pueden llegar a ser las tecnologías, además de otros aspectos que se deben tomar en cuenta en el caso de un niño; como es: Cuan interactivo y lúdico puede ser un dispositivo. Aunque evolucionan continuamente, las tecnologías involucradas pueden ser: Lógica difusa, redes neuronales y algoritmos genéticos (técnicas conocidas como inteligencia computacional). Asimismo, la teoría de sistemas no lineales y caos, procesamiento de imágenes, robótica, micro y nanotecnología, dispositivos mecatrónicos e ingeniería de software.

Por otro lado, una etapa importante de cada artículo estudiado, fue la evaluación de los objetivos de la actividad y del desempeño del paciente en la terapia. Para evaluar los objetivos de una actividad, se puede utilizar la escala conocida como GAS (del inglés: “Goal attainment scale”) propuesta en 1994 por Kiresuk, et al49. Asimismo, con el fin de evaluar el desempeño del paciente, se usan escalas de valoración funcional del miembro superior; esto quiere decir, hacer una estimación cuantitativa y cualitativa basada en la observación y el estudio de los gestos; así como los movimientos voluntarios del paciente.
En la literatura estudiada, se logró observar que los primeros trabajos que contribuyeron en el campo de rehabilitación robótica no describían con detalle el tipo de discapacidad ni el rango de edad del paciente. Sobre todo esta tendencia se mantuvo en las primeras investigaciones de la década de los 80. Definir el rango de edad de los niños y el tipo de discapacidad, por supuesto es de suma importancia e ineludible en el desarrollo de dispositivos o sistemas de rehabilitación robótica. Además, los criterios de inclusión eran muy generales, carecían de un enfoque interdisciplinario y no era frecuente el uso de herramientas de evaluación. Esta falta de enfoque podría ser causada probablemente por la complejidad del problema, porque es un campo de frontera en la investigación, por lo tanto un campo nuevo que demanda ser explorado. También, no se describían con claridad la duración de las terapias y el número de sesiones, que permitieran afianzar los beneficios de aplicar nuevas tecnologías de rehabilitación. No obstante, estas primeras investigaciones contribuyeron al avance del campo de la rehabilitación robótica.
Por el contrario, actualmente las investigaciones enfocadas a rehabilitación del miembro superior en niños, son cada vez más completas. No obstante, se debe profundizar con más investigaciones que puedan determinar si los sistemas pueden producir mejorías significativas de pacientes, en comparación con las terapias tradicionales. A continuación, se discutirá brevemente los sistemas y ambientes desarrollados; y el impacto que han presentado.
RESULTADOS Y DISCUSIÓN
Ciento veinte estudios cumplieron con los criterios de búsqueda, de los cuales fueron excluidos 70 por ser claramente irrelevantes o no cumplir con al menos un criterio de elegibilidad. También se descartan 15 por no estar disponibles los criterios de inclusión, 10 por no incluir información sobre la intervención (número de sesiones y duración de la terapia), 10 porque se centraron en la interacción con el robot con fines pedagógicos o lúdicos, y aunque se usaba el miembro superior no se le dio importancia, y 3 porque se tratan exclusivamente del estudio de habilidades para el uso de robots. De esta manera, se logró una base de datos de 12 documentos en formato PDF, proceso de búsqueda que se presenta en el diagrama de flujo de la Figura 3.
En la literatura estudiada, se pueden observar dos tendencias que permiten clasificar los sistemas o dispositivos de rehabilitación robótica, de acuerdo al nivel de interacción entre el paciente y la plataforma robótica. Tipo 1: Robots que usan habilidades motoras del paciente; es decir, establecen contacto con el paciente mediante la aplicación de fuerza como comando para lograr ciertas tareas, y Tipo 2: Robots que motivan al paciente en un ambiente controlado para imitar o seguir ciertos ejercicios, sin tener contacto. Esta última es una aplicación de la rehabilitación robótica innovadora que involucra al niño y lo hace parte de la terapia; este es el campo de los robots sociales50 que permiten la creación de personajes artificiales, de esta manera los niños logran tener un compañero o interlocutor mucho más accesible. También, los robots sociales poseen dos perspectivas de diseño45)-(46, la primera son los inspirados en sistemas biológicos; y la segunda se denomina “Diseño funcional”, donde se busca alcanzar un robot “socialmente inteligente”. Bajo este enfoque, la clasificación de los sistemas estudiados se presenta en el resumen de la Tabla 1, donde también se citan los artículos revisados y se describen brevemente de acuerdo al tipo de sistema robótico (Tipo 1 o 2), diagnostico, intervención, escalas de evaluación, participantes y resultados.

Las aplicaciones estudiadas sobre rehabilitación robótica en niños se han enfocado en las siguientes áreas: Aprendizaje de pacientes con discapacidad leve51 y severa29)-(27, diseño de dispositivos para comunicación aumentada52)-(53, asistencia en actividades lúdicas como el sistema PLAYBOT36),(54, determinación de la edad del desarrollo cognitivo30 y asistencia robótica en las tareas de la vida cotidiana55)-(56. Lo anterior fue muy importante, porque permitió obtener sistemas capaces de ser aceptados por niños e integrarlos a las terapias. Debido a esto, y mediante diferentes resultados32)-(33 se demostró que la robótica abriría nuevas vías terapéuticas. En la actualidad, la aplicación de robots para rehabilitación del miembro superior en niños está dando sus primeros pasos y promete un avance promisorio en los próximos años. De esta manera, el robot InMotion257),(63, fue el primer sistema adaptado y utilizado en 12 niños entre los 5 y los 12 años de edad con hemiplejia del miembro superior, causada por parálisis cerebral. La terapia se aplicó dos veces por semana, durante ocho semanas, con 60 minutos de duración por cada sesión. En esta se trató de motivar a los niños mediante un reto cognitivo y entretenido, para lograr tareas desafiantes mediante prácticas motoras y sensoriales. Como escalas de evaluación se utilizaron Melbourne Assessment of Unilateral Upper Limb, Fulg-meyer y Modified Ashworth Scale. Asimismo, el proyecto concluyó que era posible utilizar dispositivos y terapias para adultos en niños que sufren de hemiplejia.
También se aplicó en niños el sistema pediátrico Armeo®Spring58)-(59. Éste se basó en el sistema T-WREX usado en adultos con derrame cerebral o lesión de medula espinal60. El Armeo®Spring es un concepto de rehabilitación, compuesto por una órtesis para el brazo, instrumentada con un mecanismo con resorte para sostener la mano.
El sistema Armeo®Spring pediátrico, usa un Joystick que sirve de mando en un amplio espacio de trabajo 3D. En la actualidad, se está llevando a cabo un estudio por el servicio nacional de instituciones de salud de Estados Unidos61, con el propósito de evaluar el estado del paciente con lesión de miembro superior, antes y después de usar este sistema. Las terapias se hicieron tres veces por semana, durante tres semanas, con 45 minutos de duración por cada sesión, con 15 niños entre 7 a 17 años. Además, la terapia se hizo con el aumento progresivo de la dificultad, y aún no se reportan resultados en la literatura.
Aparte de las aplicaciones con robots físicos, se han desarrollado terapias mediante tecnologías como: robots virtuales, realidad virtual, realidad aumentada o la combinación de plataformas robóticas con las tecnologías en mención. Cifuentes62, mediante la herramienta de programación gráfica LabView, simuló un carro de fórmula uno. La terapia se desarrolló con una niña de 11 años, ella debió conducir el carro cinco veces a través de la pista con movimientos de su brazo. Como resultado se pudo ver el aumento de la motricidad fina.
Otro sistema robótico para el entrenamiento del miembro superior es el NJIT-RAVR63 (del inglés: “New Jersey Institute of Technology Robot-Assisted Virtual Rehabilitation System”). Este consistió en un robot Haptic Master de 6 grados de libertad, en combinación con un anillo mecánico para sostener la mano. Éste se probó con dos niños con PC, quienes hicieron varios juegos en entornos de realidad virtual. La terapia se aplicó tres veces por semana, durante tres semanas, con 60 minutos de duración por cada sesión. Los escenarios se plantearon con el fin de lograr metas específicas de rehabilitación, tal como mejorar la velocidad y la precisión de los movimientos del hombro y codo; así como, mejorar los movimientos de supinación y pronación del antebrazo. En general, según la escala de valoración Melbourbe, los pacientes mejoraron su actividad motora.

Asimismo, la empresa Tyromotion ha desarrollado varios dispositivos para el miembro superior. El primero es AMADEO®, utilizado en pacientes con dificultad para mover los dedos. Este es un dispositivo mecánico de rehabilitación, el cual permite la terapia pasiva, asistida o activa de los dedos. Aunque AMADEO® posee una limitación, no es adaptable para niños menores de 7 años que tienen una mano pequeña. El segundo es DIEGO®, un dispositivo para pacientes que necesitan rehabilitación intensiva, con el fin de recuperar parámetros funcionales del miembro superior. DIEGO® es el primer robot del mundo para rehabilitación en usar compensación inteligente de gravedad o IGC (del inglés: “Intelligent Gravity Compensation”), esto se hace removiendo el peso del brazo del paciente al mismo tiempo que permite terapias pasivas, activas o asistidas del miembro superior. El tercer sistema es PABLO®, y se usa para rehabilitación del movimiento del hombro. Además, los tres sistemas anteriores están combinados con extensos juegos de realidad virtual, que a su vez son motivantes y desafiantes. Sin embargo, no hay estudios pediátricos reportados en la literatura, lo que constituye una desventaja de estos sistemas respecto a las ventajas frente a la rehabilitación tradicional.
En 2009 Wille, et al.25 desarrollaron un sistema de rehabilitación con protocolos de terapia, compuesto por un guante instrumentado para hacer actividades basadas en realidad virtual, denominado: Sistema pediátrico interactivo de terapia basado en realidad virtual. Además, este sistema es comercializado como YouGrabber por la compañia YouRehab64 (Interactive Rehabilitation Systems). Se hizo una terapia donde participaron cinco niños con lesiones del miembro superior congénitas o lesiones neurológicas periféricas. La terapia se aplicó tres veces por semana, durante tres semanas, con 45 minutos de duración por cada sesión. Como instrumentos de evaluación se utilizaron Melbourne Assessment (MA), Box and Block Test (BBT) y Nine Hole Peg Test (NHPT). El resultado fue la motivación y la facilidad de aplicar en niños las terapias basadas en realidad virtual.
También, Hayes et al.65 en 2009 desarrollaron una importante investigación en términos de diseño. El estudio se basó en la participación de los pacientes en el diseño y evaluación de dos dispositivos para rehabilitación del miembro superior de niños con parálisis cerebral, estos sistemas se denominaron: PSAMD y RSAMD. El proyecto se desarrolló con niños entre 5 a 12 años, 37 sanos y 15 con compromiso en sus miembros superiores. Lo anterior fue una buena oportunidad de explorar el campo de interacción humano-computador, debido a que generalmente el diseño se hace con participación solo de maestros, padres y terapeutas; pero no con los niños directamente.
Green, et al.66 evaluaron la viabilidad y el efecto terapéutico de un tablero de mesa con realidad virtual para mejorar habilidades motoras del miembro superior. Participaron cuatro pacientes de 9 a 19 años en tres sesiones de 30 minutos por semana, durante cuatro semanas. La evaluación se hizo por medio de la escala ICF-CY (del inglés: “International Classification of Functioning, Disability and Health”). Se obtuvo como resultado progreso en el desarrollo de actividades de la vida diaria.
De igual forma, la adaptación de sistemas comerciales de realidad virtual brindan la posibilidad de hacer terapias y estudios de rehabilitación del miembro superior, tal es el caso del Nintendo WiiTM, usado por Winkels67 para tratar lesiones del miembro superior causadas por la parálisis cerebral. Se hicieron terapias dos veces por semana durante seis semanas, con una duración de 45 minutos por cada sesión, con 15 niños de 6 a 15 años. Para evaluar las actividades se usaron las escalas Melbourne Assessment of Upper Limb Function y ABILHAND-Kids. Como resultado se observó que no hubo cambio de la calidad de los movimientos del miembro superior; sin embardo, se aumentó el uso del miembro superior en la vida diaria.
En 2009 Wood, Lathan, Kaufman presentaron un ambiente y una plataforma robótica llamada CosmoBot65. El robot detectó gestos y movimientos de los miembros superiores del paciente y realimentó la actividad a través del mismo robot. Se aplicaron pruebas a tres niños de 4 a 11 años, con lesión del miembro superior debido a parálisis cerebral. Como resultado se observó la facilidad de desarrollar terapias mediante robótica y realimentación de la actividad. Otro proyecto en 201369, mediante el uso de CosmoBot, se llevó a cabo con seis pacientes que sufrían de parálisis cerebral con edades entre 5 a 18 años y con niveles de discapacidad de I, III y IV según la escala funcional GMFM. De esta manera, se aplicó una terapia donde se evaluó el desempeño de los miembros superiores frente a pronosupinación y flexoextensión de muñeca. Una ventaja del sistema respecto a la terapia tradicional, es el tiempo de realimentación con las tareas del paciente que ocurre en menos de 500 ms aproximadamente, lo que es muy rápido. Por el contrario, una desventaja fue identificar claramente la eficacia del sistema debido al número de pacientes que participaron del estudio
Suárez Mejías, et al.68 en 2013 diseñaron un robot para neurorehabilitación llamado: “URSUS”, que se complementó con actividades de realidad aumentada. Este fue un robot social diseñado especialmente para rehabilitación de miembros superiores de niños con discapacidades motoras como hemiplejia. El estudio se llevó a cabo con seis niños de 3 a 6 años, y se evaluaron las actividades mediante GAS y Nine hole peg. Como resultado se mostró mayor motivación respecto a las terapias tradicionales. El mismo año Calderita, et al.66 apropiándose del potencial de los robots sociales desarrollaron THERAPIST. Un ambiente tecnológico compuesto por un software con múltiples funciones y la plataforma robótica URSUS, el cual es un sistema interactivo más completo para asistencia en neurorehabilitación. Este interactúa con el paciente mediante percepción de movimientos y realizando acciones específicas, y al terapeuta le brinda herramientas administrativas, de monitoreo y planeación de tareas.
Recientemente, Shire, et al.70 adaptaron un lápiz a un dispositivo de percepción háptica denominado: PHANTOM Omni, con el fin de desarrollar una serie de actividades en un ambiente virtual 3-D. El número de pacientes fue de 51, entre 5 a 11 años, correspondiente a 34 hombres y 17 mujeres. Como resultado de la terapia se observó el aumento de motivación en la terapia utilizando el robot.
PROYECCIONES DE LA REHABILITACIÓN ROBÓTICA
Diferentes investigadores apreciaron un panorama de gran desarrollo e influencia en el sector salud para la rehabilitación robótica67, como empieza a ocurrir actualmente. Entender el futuro de la tecnología en mención no es tarea fácil, y para hacerlo se debe responder una serie de preguntas como aseguran Hidler, et al.68, por ejemplo: ¿Cuál es la meta de un robot?, ¿Cuáles son las barreras de aceptación que una clínica y personal podrían establecer a dispositivos robóticos para rehabilitación?, ¿Cómo deberían ser los nuevos dispositivos, portátiles, o de uso doméstico?
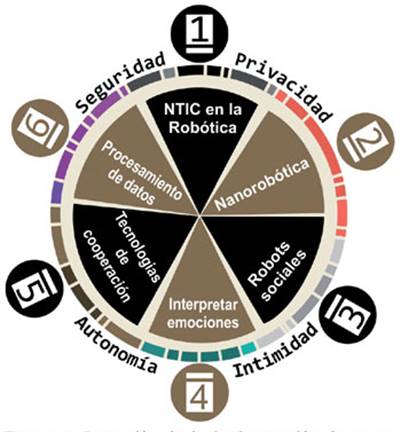
A partir de los estudios revisados y de los avances presentados, se espera que robots terapéuticos y robots para asistencia tengan más funciones como: Aprender del paciente, detectar y reconocer cada día nuevos objetos, reconocer el rostro del paciente y la voz con el fin de expresar emociones. Estos robots terapéuticos podrán ser más precisos en reconocer posturas y movimientos individuales, interactuar de forma visual y usar más tecnologías táctiles69. De igual forma, se podrán integrar robots con telepresencia, lo que ofrecería la posibilidad de la telerehabilitación70)-(71. Al mismo tiempo, se deberá brindar cada vez más seguridad, privacidad, intimidad y autonomía al paciente. Un resumen de las tecnologías disponibles para trabajos futuros se presenta en la Figura 4. Por lo tanto, de la elaboración de esta revisión de literatura podemos concluir lo siguiente.
CONCLUSIONES
En este artículo de revisión se presentaron los avances que ha concebido la ingeniería de rehabilitación a través de la rehabilitación robótica para niños con lesión del miembro superior. Esto se consideró al estudiar la literatura reportada, donde cada año se desarrollan nuevos dispositivos, software y protocolos de terapia; aunque muchos de estos desarrollos son escasos para niños o no tienen aplicación alguna en población infantil. Sin embargo, en diferentes estudios reportados en la literatura especializada, las terapias con sistemas robóticos están demostrando ser igual de efectivas frente a las terapias convencionales, bajo los mismos parámetros de intensidad y tiempo de tratamiento. No obstante, se debe entender que el propósito de robots en terapias es ser una herramienta, en ningún momento puede sustituir el papel del fisioterapeuta o médico especialista para orientar la terapia e interpretar los resultados. Sin negar la importancia de la autonomía en los sistemas robóticos y su carácter lúdico, que permitan mantener una alta motivación por parte del paciente de pediatría. En este orden de ideas, se debe garantizar el recurso humano necesario para que las sesiones de rehabilitación tengan una frecuencia deseable y así obtener los mejores resultados.
Por otro lado, se observó que la rehabilitación robótica posee su propio enfoque de los problemas técnicos que enfrentan ingenieros y diseñadores; esto significa que para desarrollar nuevos sistemas de rehabilitación robótica, se requiere tener en cuenta lo siguiente: La adaptabilidad al usuario final, el consumo energético y la aceptabilidad de la tecnología por terapeutas e instituciones especializadas en rehabilitación.
Finalmente, aunque los adelantos tecnológicos en rehabilitación robótica infantil van en aumento, actualmente se hace necesario mayor disponibilidad de información sistemática, aumento del componente interdisciplinar, delimitación del problema, realimentación de resultados, terapias lúdicas; así como, establecer alianzas con instituciones especializadas de salud.

