











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
PermalinkMétodo e identificación del problema
de medición de tiempo, masa, velocidad, peso, color, temperatura y demás variables que son de importancia para determinar las tendencias de los fenómenos físicos estudiados. Los altos costos de los equipos de laboratorio crean la necesidad de diseñar y construir un equipo especial para tomar la variable más utilizada de todas, el tiempo.
Durante la etapa de diseño y pensando en posibles usuarios futuros, surge la necesidad de implementar un Hardware y Software de libre acceso (Open Source), que tenga un buen nivel de reproducibilidad, evitando así problemas de altos costos en compra de Hardware y Software. Gracias a las licencias libres es posible diseñar y fabricar diferentes y significativos laboratorios y sistemas basados en el sistema Arduino Nano, que fue el seleccionado para la puesta en marcha de este prototipo.
Necesidad de la experimentación en los cursos de física
En el mundo actual y a lo largo de la historia de las ciencias, desde Rene Descartes (1596) e Isaac Newton (1643) a Carl Sagan (1934) y Peter Higgs (1929), pasando por todos los estudiantes y personas dedicadas o relacionadas con las ciencias naturales e ingenierías, existe la necesidad y obligación de hacer mediciones directas e indirectas de todo tipo de magnitud física, como requisito y paso fundamental impuesto por el método científico. Es por esta razón que medir el tiempo adquiere una importancia especial, ya que esta es la variable independiente por excelencia que rige a todos y a todo.
Esto permite conocer cómo evoluciona un fenómeno en función del tiempo, y así poder determinar múltiples magnitudes cinemáticas físicas del mismo, como pueden ser: Velocidad instantánea (aproximada), velocidad media, aceleración, periodos y/o frecuencias de oscilación de péndulos, contar oscilaciones entre otras.
Criterios y aspectos tenidos en cuenta para el diseño del sistema
En general los sistemas y métodos de adquisición de datos (en este caso tiempos), con los que se dispone en Colombia, son de muy buena calidad, precisión y exactitud, sin embargo, en su mayoría son desarrollados en países donde el aspecto económico no es una limitante, es decir que los usuarios de los países desarrolladores no tienen dificultades en contar con tal o cual sensor según sean sus propias necesidades; en contraste en Colombia adquirir cualquier tipo de sensor es normalmente costoso, mías aún si cada día dependemos de la cotización del precio del dólar, lo cual impide que instituciones educativas de tamaño mediano y pequeño tengan la posibilidad de contar con equipos idóneos (incluso con ninguno) para la enseñanza de la física.
Otra limitante para las instituciones colombianas, son las barreras del lenguaje, ya que la literatura, contactos, soporte etc., para conocer detalles sobre estos equipos se encuentran en su mayoría en lenguajes diferentes al español, esto hace que el espectro de posibilidades para hacer una adecuada adquisición se vea también afectada.
El aspecto técnico también es fundamental, ya que los sistemas disponibles en el mercado colombiano son de licencia cerrada, lo cual nos impide hacer cualquier modificación en el hardware o software para ajustarlo a nuestras propias necesidades, haciendo esto que muchas veces estos tipos de equipos sean subutilizados.
El ambiente académico actual demanda nuevas formas de satisfacer en los estudiantes el deseo por adquirir y/o desarrollar el conocimiento, aumentar la capacidad de análisis de situaciones, la búsqueda de soluciones, el incremento de pensamiento crítico, los aspectos anteriores se han tenido muy en cuenta para el desarrollo e implementación del prototipo desarrollado y puesto a prueba.
Fundamentos pedagógicos que justifican la necesidad de la practica/experimentación en los procesos de enseñanza aprendizaje
El prototipo desarrollado en este trabajo sería herramienta fundamental en el proceso de enseñanza aprendizaje en cursos de física mecánica de colegios y universidades de Colombia, razón por la cual pedagógicamente se tuvieron que tener presentes conceptos tales como:
■ Aprendizaje significativo: El cual según el profesor de la universidad ICESI José H. González afirma que: "La capacidad para definir el área o tema de su interés; de buscar la información en diferentes fuentes, de planificar los espacios de estudio y cumplirlos; de extractar de los materiales las ideas principales y secundarias; de hacer referencia continuamente a sus propias experiencias dentro de la misma área de estudio, y con otras áreas de conocimiento y de experiencia; de atreverse a solucionar problemas ya formulados en los materiales de estudio que ha seleccionado; de atreverse a formular situaciones hipotéticas de utilización de los contenidos que está aprendiendo; de atreverse a encontrar similitudes o diferencias radicales entre el área de conocimiento (o el tema) que está estudiando y otras áreas del conocimiento; y finalmente, de evaluar los resultados del proceso de aprendizaje...".[1]
■ Inteligencias múltiples: Donde el investigador de la universidad de Harvard Howard Gardner (1979), definió la inteligencia como: "la capacidad de resolver problemas o de crear productos que sean valiosos en uno o mías ambientes culturales". Lo sustantivo de su teoría consiste en reconocer la existencia de ocho inteligencias diferentes e independientes, que pueden interactuar y potenciarse recíprocamente. La existencia de una de ellas, sin embargo, no es predictiva de la existencia de alguna de las otras. [2]
■ Aprendizaje basado en Resolución de Problemas (ABP): Según el cual un problema es "una tarea que plantea al individuo la necesidad de resolverla y ante la cual no tiene un procedimiento fácilmente accesible para hallar la solución" (Lester, 1983). Así, se debe distinguir entre un problema y un ejercicio de aplicación. Para solucionar un problema se requiere mías que saber cómo realizar cálculos o aplicar procedimientos. [3]
Fundamentos Basicos del Hardware utilizado
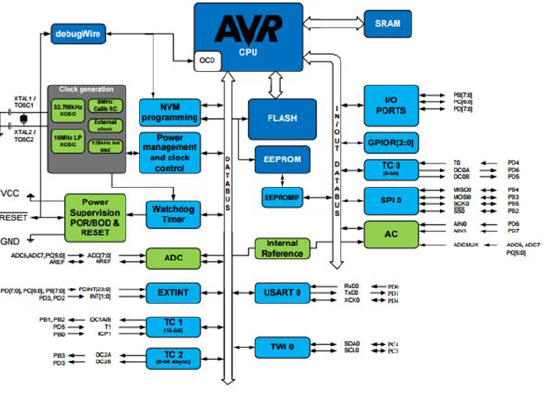
El corazón del hardware escogido para desarrollar este prototipo fue el módulo Arduino Nano, debido a su fácil disponibilidad, bajo costo y por ser un Hardware de licencia abierta.
El míodulo Arduino Nano es una pequeña y completa placa basada en un procesador ATmega328 (Figura 1). Tiene más o menos la misma funcionalidad de la Arduino Duemilanove y Arduino UNO, pero en un paquete diferente. Carece de toma de corriente continua, en cambio se comunica y alimenta con un cable USB Mini-B. El Arduino Nano fue diseñado y es producido por Gravitech. [4]
Proceso de construcción
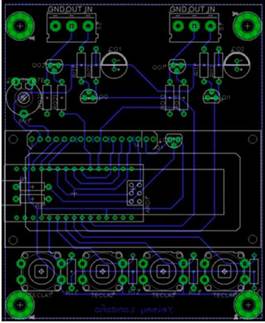
En el proceso de diseño (Figura 2) del sistema se tuvieron en cuenta que todos los elementos usados fueran de fácil adquisición en el mercado local; que no fueran de tamaño demasiado reducido, de tal forma que cualquier usuario lo pueda reparar y/o modificar; se dispusieron los elementos en la placa de tal forma que se pueda hacer seguimiento a los procesos en el prototipo.
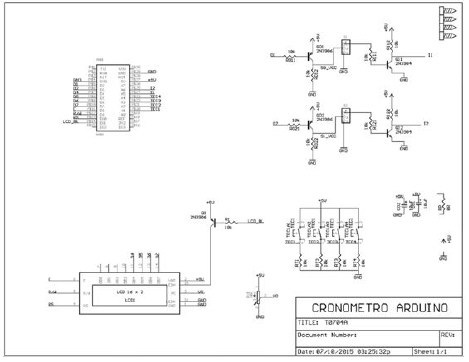
El diseño, simulaciones y esquema (Figura 3) se hicieron con el software Eagle versión 5.
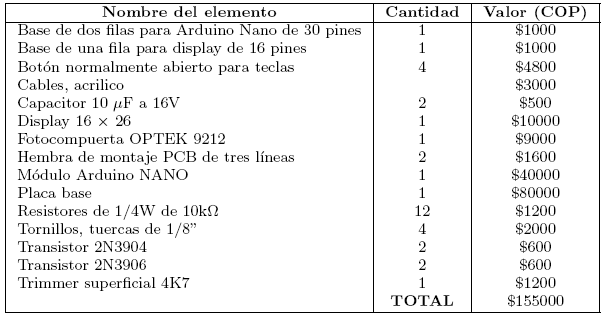
Los costos de los elementos usados para el ensamblado del sistema, son los de una tienda de electrónica común del mercado local, los materiales, cantidades y costos aparecen listados en la Tabla 1.
Fundamentos básicos del software utilizado
En el proceso de ensamblado y configuración del sistema, fue necesario instalar el programa desarrollado en el módulo Arduino, el cual se encarga de interpretar los datos de tiempo obtenidos por el fotosensor e interpretarlos y mostrarlos como velocidad o aceleración según sea la necesidad del usuario, ya sea en el propio display del sistema o en la pantalla de un computador. De manera complementaria se creó una interface grafica de usuario GUI que puede mostrar en la pantalla de un computador, los resultados mostrados en el display del prototipo acompañada de sus gráficos correspondientes. Los lenguajes de programación utilizados para desarrollar estos programas fueron:
■ Arduino: El ATmega328 del Arduino Nano vienen precargado con un cargador de arranque que le permite cargar nuevo código a ella sin el uso de un programador de hardware externo. Se comunica usando el protocolo original STK500. Se puede pasar por alto el gestor de arranque y programar el microcontrolador a través de la (programación serial en circuito) ICSP encabezado utilizando Arduino ISP o similar. Para programar o editar el programa de la placa Arduino que controla el Timer-Arduino, es necesario instalar su propio lenguaje o sketch de la pagina www.arduino.cc del proveedor. Este software es de licencia libre.
■ Processing: El sistema en uno de sus modos de funcionamiento, puede transmitir los datos y resultados obtenidos a un computador a través de puerto serial, se creío un programa que muestra los resultados y gráficos en la pantalla del computador, esta consola o GUI se hizo en el lenguaje de programación Processing. Este lenguaje de programación se puede descargar directamente del WebSite del proveedor en https://processing.org/download/7processing. Este software es de licencia libre.
Descripcion general del sistema
Los botones de interacción del prototipo con el usuario se muestran en la Figura 4.
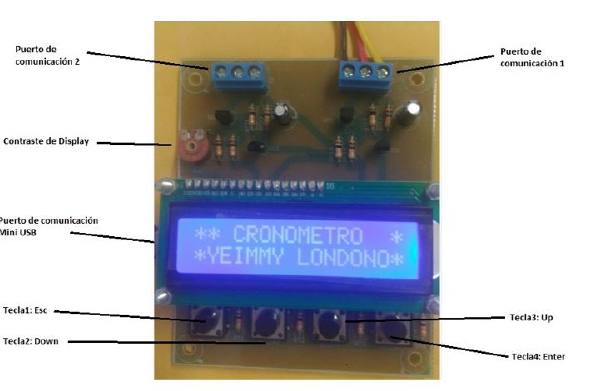
■ Puertos de comunicación (1 y 2): Permiten la conectividad del sistema con el medio exterior a través de diferentes tipos de sensores según este programado el sistema, en el trabajo presente está programado para que el sensor a usar sea una fotocompuerta comercial conectada al puerto de comunicaciones 1 que mide tiempos de sombra entre la misma. El puerto de comunicaciones 2 está disponible para futuras aplicaciones y puede implementarse por software según la necesidad.
■ Puerto de comunicación Mini USB: Puerto de comunicación del propio Arduino Nano que permite la transferencia de datos desde y hacia el sistema. A través de este mismo puerto el sistema se alimenta, ya sea a través del computador o una fuente/cargador estándar de celular. Contraste del display: Permite ajustar la luz de fondo del display según las necesidades del usuario, para que se pueda tener una lectura cómoda de los mensajes mostrados en el display.
■ Tecla1 (Escape): Retrocede uno a uno entre los diferentes menú hasta llegar (si es necesario) al inicial "TOTAL FRANJAS:
■ Tecla2 (Down): Cambia entre las opciones del menú escogido hacia abajo, por ejemplo; si se está en el menú "TOTAL FRANJAS...", su valor decrecerá de uno en uno hasta llegar al mínimo que es 1.
■ Tecla3 (Up): Cambia entre las opciones del menu escogido hacia arriba, por ejemplo; si se estaá en el menuá "TOTAL FRANJAS...", su valor aumentaraá de uno en uno hasta llegar al máaximo que es 10.
■ Tecla4 (Enter): Acepta la opción seleccionada en el menú que se encuentre activo.
Determinación de la incertidumbre en las medidas del tiempo del TIMER
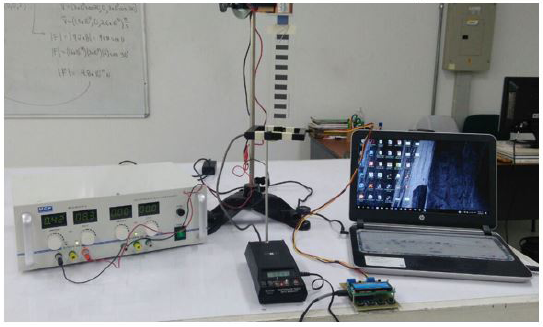
Se debió de montar un sistema tal que un TIMER patrón tomará medidas de tiempo de forma simultánea y bajo las mismas condiciones que el TIMER prototipo, para esto se siguieron los siguientes pasos:
Se escogió el TIMER PASCO ME-9215A del laboratorio de física mecánica de la Universidad Cooperativa de Colombia sede Cali, el cual es un equipo que se encuentra calibrado y de la cual se conoce su ficha técnica, se usó este equipo como TIMER patrón para determinar un estimado de la incertidumbre del prototipo construido.
Se adosaron las Fotocompuertas del Timer PASCO y el Timer prototipo, asegurando que las alturas de los de los diodos emisores y fotoreceptores fueran las mismas, para lograr que la franja de la cual se cronómetro el tiempo de paso, activaran de forma simultanea los dos Timer.
Se implementó un electroimán a una altura fija en un soporte universal, que sostuviera por electromagnetismo un clip que a su vez sostenía la reja de franjas oscuras, esto con el fin de lograr que la reja se pudiera soltar siempre con las mismas condiciones al interrumpir el flujo de corriente a través de la fuente DC.
Se dispusieron todos los elementos (Figura 5) de tal forma que cada vez que se interrumpid el flujo de corriente en el electroimán, la reja caía libremente a través de las dos Fotocompuertas, ambos Timer se colocaron en modo GATE, en el cual los sistemas cronometran el tiempo de sombra a través de ellas, únicamente de la primera franja que detectan; el ancho de la franja utilizada fue de 10mm.
Se procedió a tomar 30 datos de tiempo de sombra en las mismas condiciones con ambos sistemas y hacer el análisis estadístico de los mismos.
Se tuvo en cuenta para la toma de los datos que ambos Timer presentaban un error de apreciación en los display de 1ms. Los resultados intermedios y la incertidumbre se muestran con tres decimales (Δt = 1, 340ms), sin embargo, hay que tener en cuenta que el redondeo debe llevarse hasta la unidad. Otro criterio a tener en cuenta en instrumentación, es que se debe redondear por encima para asegurar que todos los valores futuros de tiempo, a medir, está en contenidos dentro del intervalo de confianza, es decir que en conclusión la incertidumbre en las medidas de tiempo del Timer prototipo es:
Descripción del sistema como instrumento independiente
El sistema se encuentra en Modo Independiente cuando no está conectado a un computador (Figura 6) para ser operativo. En este modo sólo requiere de conexión a la fuente de poder y está listo para hacer toma de datos, en futuras versiones se ha considerado que el sistema pueda funcionar mediante el uso de batería recargable semejante a un teléfono celular.
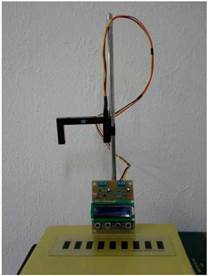
En este modo de operacioán los resultados se muestran directamente en el display, los cuales son: Velocidad media (m/s), Tiempo total (s) y/o Aceleracián (m/s2).
Sistema acoplado a un computador
El sistema está en modo acoplado a un computador (Figura 7) cuando este envía los datos que aparecen en el display al computador a través de conexión serial usando el puerto estandar USB de los computadores, gracias al software (GUI) interpreta gráficamente los datos y resultados, los cuales muestran en la pantalla del computador las tendencias del MRU y del MRUA.

Ensayo del prototipo y resultados arrojados
El sistema se ha probado haciendo prácticas de laboratorio en ambientes académicos reales (Universidad del Valle sede Tuluá), en temas como Cinemática (Movimiento rectilíneo uniforme y Caída libre), y Trabajo y energía (Teorema del trabajo y la energía).
A continuación se muestra a manera de ejemplo los apartes de la guía de laboratorio usado para el experimento de Teorema del trabajo y la energía y los resultados obtenidos por uno de los grupos de trabajo:
Ejemplo - Teorema del trabajo y la energía
■ Verificar experimentalmente el teorema del trabajo y la energía
■ Calcular el trabajo mecánico realizado por una fuerza constante F.
■ Obtener experimentalmente la energía cinética de un móvil.
Los datos medidos (teóricos) de la masa M del carro planeador, la masa suspendida m y la aceleración de la gravedad son respectivamente:
Masa del carro planeador M = (0.19021 ± 0.00001) Kg Masa suspendida m = (0.00387±0.00001) Kg Aceleración de la gravedad g = 9,810m/s2
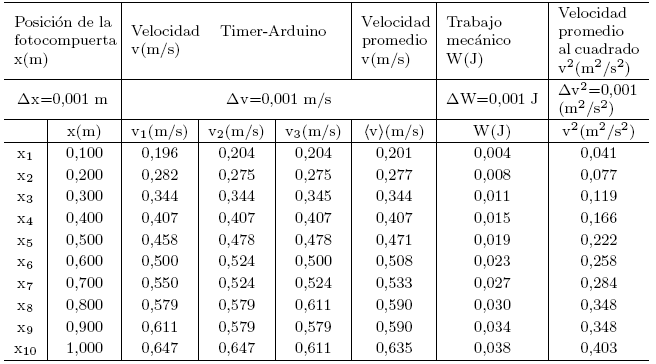
Se montaron los equipos como se muestra en la Figura 8, se tomaron los datos y se registraron en la Tabla 2, luego se calcularon las columnas de trabajo W y velocidad al cuadrado V2. La columna del trabajo para esta situación se calcula multiplicando cada distancia de recorrido del carro X por la fuerza constante mg, ya que se considera que las otras fuerzas que actúan sobre el sistema no aportan al trabajo neto, puesto que el peso y la normal del carro son perpendiculares al desplazamiento y que la fuerza de fricción debida al carril de aire es despreciable. [5]
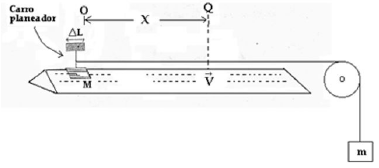
TABLA 2 Datos experimentales obtenidos por estudiantes para el experimento de "Teorema del trabajo y la energía".
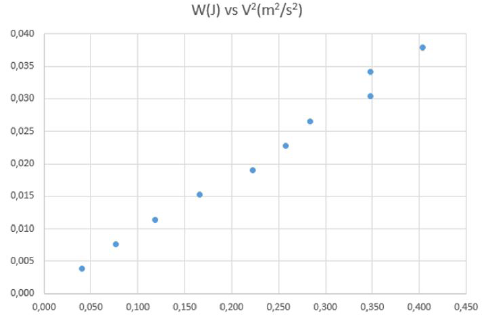
Realice un gráfico del trabajo W vs V2 (Figura 9) y con base en este gráfico calcule el valor de la masa del carro planeador M. ¿Qué se puede decir de la relación entre variables en este gráfico?
Compare el valor de la masa del carro M obtenida del numeral anterior con la masa real del carro Mreal (medida directamente mediante una balanza).
Según la ecuación
, la dependencia entre el trabajo (W) y la velocidad al cuadrado (V2) es de tipo lineal (Figura 8) con pendiente igual a la mitad de la masa del carro planeador y corte en el origen. Se procediá entonces a hacer el ajuste de tipo lineal con la ayuda de Excel, la ecuación ajustada es:

El valor del corte de esta recta con el eje del trabajo W debe de valer cero (0) en teoría, sin embargo, experimentalmente está dando un número del orden de 10-5, el cual puede considerarse despreciable.
Además, se puede interpretar que la masa del carro planeador M es el doble de la pendiente que en unidades del SI es: (M) = 0.18525Kg. Usando la ecuación δm =
se obtiene el error absoluto δm = ΔM = 0.00328Kg. A partir de los propios datos experimentales obtenidos se puede reportar completamente el valor experimental de la masa del carro planeador junto a su error asociado como:

Recomendaciones, sugerencias y conclusiones
■ El sistema diseñado y probado cuenta con dos puertos de entrada que pueden tomar dos tipos diferentes de mediciones desde dos equipos o sensores y ampliar de esta forma el rango de aplicaciones o prácticas de laboratorio que se pueden llevar a cabo.
■ El código de programación tanto del Arduino como de la GUI pueden editarse para lograr mejoras en sus líneas de código, mejorar la interfaz, cambiar o editar la forma de presentar la información y presentar otros tipos de resultados, según la necesidad y creatividad del usuario.
■ Se construyó un sistema que de forma autónoma y/o conectado a un computador, mide tiempos, velocidades medias, velocidades instantáneas y aceleraciones medias para el desarrollo de prácticas de laboratorio en colegios y universidades colombianas que no cuentan con los recursos económicos suficientes que les impide comprar equipos muy costosos del exterior.
■ Se documento todo el proceso de diseño, construcción e implementación del prototipo, de tal forma que cualquier profesor o institución interesado pueda reproducirlo y/o complementarlo.
■ Se puso a prueba el sistema en un ambiente académico real, obteniendo resultados con errores menores al 5 % respecto de los valores teóricos esperados.

