











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
PermalinkIntroducción
Una interfaz para control cerebral basada en señales de EEG (electroencefalografía), en forma general denominada BCI (Brain Computer Interface) busca establecer un enlace directo entre el cerebro y una máquina, sin utilizar acciones motoras directas. Su desarrollo esta principalmente orientado hacia la ayuda a personas con discapacidades motoras severas, que poseen deterioros en el sistema nervioso y muscular, pero no presentan lesiones cerebrales.
A partir del entendimiento de las propiedades físicas de una unidad MINDFLEX, desarrollada principalmente para su utilización en juegos, y su adaptación a las características de una BCI se desarrolló un modelamiento experimental e instrumental de una interfaz que permitió obtener y manipular señales eléctricas provenientes del cerebro, a bajo costo ( menos de US$ 500) y con gran eficacia. Esta interfaz se aplicó a una prótesis de mano, diseñada con impresión 3D que responde a las señales eléctricas originadas en el lóbulo frontal.
Aspectos Teóricos
1. Interfaces de Comunicación a través de EEG (BCI)
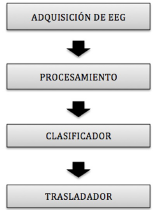
Una interfaz basada en EEG, es un montaje de comunicación que permite establecer una relación directa entre el cerebro humano que reacciona ante un estímulo, y un computador que lo interpreta y lo traduce en otro tipo de señal que puede ser utilizada para generar trabajos con otros dispositivos [1].
Podemos dividir los sistemas BCI en tres grupos diferentes [2]: -Activo: se caracteriza por permitir el control de manera consciente y voluntaria de un sistema BCI, independientemente de los eventos externos.
-Reactivo: el control de la aplicación, está directamente relacionado con un estímulo externo que indirectamente modela la actividad cerebral.
-Pasivo: se deriva del procesamiento de señales cerebrales arbitrarias y generadas sin ninguna intencionalidad por el usuario. La información allí contenida se utiliza para saber nuestro estado cognitivo, así como nuestros niveles de atención, relajación, etc.
Toda interfaz basada en EEG posee la estructura como se muestra en la Figura 1.
2. Potencial de acción generado en las neuronas
El cerebro está compuesto por millones de neuronas. Cada neurona está conformada por un cuerpo celular llamado soma, dendritas, axones y terminaciones nerviosas. La información llega a la neurona a través de las dendritas, las cuales reciben información de en promedio 10000 neuronas. Con relación a la membrana celular, el exterior de la neurona tiene mayor concentración de iones Na+ y el interior mayor concentración de iones K+. Con esta concentración, el potencial de membrana es -70mV, donde la parte interna se carga negativamente y la parte externa positivamente [4,5].
En la despolarización de la neurona debido a la información recibida en las dendritas, se produce un potencial de acción que viaja a través del axón como se ve en la Figura 2.a [6].
Configuración de la corteza cerebral
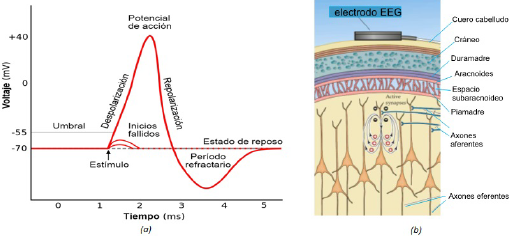
FIGURA 2 Señales cerebrales y su registro. a)Potencial de acción en la membrana de una neurona, b)Generación de una señal EEG. Tomado de [6] .
El cerebro está compuesto por dos hemisferios (izquierdo y derecho) separados por un cuerpo calloso. La corteza de cada hemisferio cerebral posee una serie de pliegues denominados circunvoluciones o giros, que se encuentran separados por fisuras o surcos [4,7]. Las subdivisiones de cada hemisferio se basan en varios surcos de la corteza cerebral y se denominan lóbulos. Para referenciar partes de la corteza cerebral se utiliza, complementariamente, las áreas de Brodmann [8,9], que están numeradas del 1 al 51 por la cito-arquitectura o disposición de las neuronas que conforman la corteza cerebral (Figura 3).
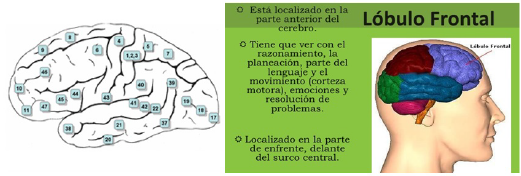
El lóbulo frontal, de vital importancia para este trabajo, posee tres áreas reconocidas con funciones determinadas. El área precentral que se divide en posterior (motora primaria) y anterior (motora secundaria) encargadas de los movimientos individuales de diferentes partes del cuerpo. Otra área de este lóbulo, es la ocular frontal donde están determinados los movimientos conjugados de los ojos, a la vez que controla los movimientos oculares voluntarios producidos independientemente de los estímulos visuales [9].
La llamada área de lenguaje o de broca, como su nombre lo indica, está encargada principalmente de la producción del habla y finalmente se encuentra el área de corteza prefrontal y que se asocia a la meditación, la atención y la concentración del sujeto, la que a su vez tiene fuerte conexión con la personalidad del individuo y su expresión de sentimientos.
Generación de las señales EEG
La corteza cerebral está conformada principalmente por neuronas piramidales [10], y las señales EEG son producidas por la sincronización local de miles de neuronas piramidales [4]. Esta sincronización se presenta por la sumatoria de sinapsis excitadoras en las dendritas de miles de neuronas piramidales. Esto genera en cada neurona un dipolo conformado entre la carga del soma y la carga de las dendritas, Figura 2.b.
De esta manera, la corriente en el cerebro está conformada por el bombeo de iones Na+, K+, Ca++ y Cl- a través de la membrana de las neuronas [9]. En consecuencia, las señales electroencefalograficas EEG consisten en un conjunto de ondas eléctricas generadas por la corteza cerebral [6].
Cuando se mide con electrodos superficiales (Scalp o no invasivos), el rango de voltajes esta entre 0 y 300μV, con frecuencias que oscilan entre 0.5 y 100 Hz. Algunas de las ventajas que presentan este tipo de señales son: la buena resolución temporal (ms), el hecho de que las señales están permanentemente disponibles para ser capturadas, que la grabación es sencilla y el costo de los equipos para su detección es bajo.
Clasificación de los potenciales de las señales EEG
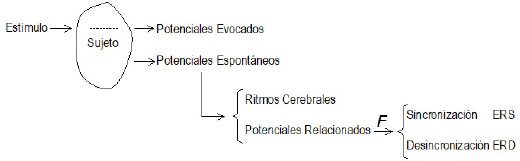
Los potenciales de las señales EEG pueden clasificarse en Potenciales Evocados si se producen como respuesta a un estímulo externo y Potenciales Espontáneos si nacen de la "voluntad" del sujeto.
Dentro de los potenciales espontáneos podemos diferenciar los Ritmos Cerebrales que se registran en condiciones de reposo, cuando las neuronas no procesan información, y los Potenciales Relacionados RP (Related Potentials), que se producen como consecuencia de algún evento puntual. Generalmente los RP son de reducida amplitud comparados con la actividad de base (background). Por ejemplo, las señales de EEG en el cuero cabelludo relacionadas a una actividad motora (MRP) Movement Related Potential) presentan relaciones señal-ruido menores a -10 dB [3,11].
Para este trabajo las señales fueron tomadas del lóbulo prefrontal izquierdo donde según estudios [9], se concentran las señales asociadas a meditación, atención y concentración. Cuando el análisis se efectúa en el dominio de frecuencias se incorporan los términos ERS (Event Related Sincronization), para describir el incremento de la energía en alguna banda como consecuencia de un evento, y ERD (Event Related Desinchronization), para su decremento. Figura 4[3,11].
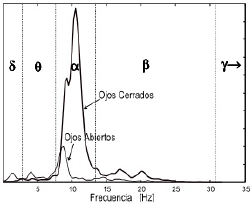
El espectro de frecuencias de las señales electroencefalograficas se extiende desde algunas décimas de Hz hasta aproximadamente 100 Hz. En el análisis espectral de señales EEG, se definen ciertas bandas de importancia clínica que se denominan con las letras griegas δ, Θ, α, β y γ. Si bien estas bandas no tienen límites precisos abarcan aproximadamente los intervalos mostrados en la Tabla 1[3]:
TABLA 1 Intervalos de frecuencias de las señales electroencefalograficas.
| δ | < 4 Hz |
| Θ | 4 -8 Hz |
| α | 8-12 Hz |
| β | 12-32 Hz |
| γ | >32Hz |
La distribución espectral de la energía de las señales de EEG depende de la actividad mental en ejecución. En la Figura 5 se muestran espectros típicos de EEG; estos corresponden a registros tomados con electrodos superficiales en la zona occipital con ojos abiertos y con ojos cerrados sobre un ancho de banda de 32 Hz. Se puede observar, en ambos casos, una predominancia de la banda alfa.
Análisis tiempo-frecuencia (t-f) utilizando Wavelets
Si se tiene una señal x(t), se puede conocer su espectro energético si se descompone en una base de funciones de buena localización espectral (es decir alta resolución). Si x(t) es limitada en frecuencia (0, BW), y se utiliza como base, exponenciales complejas del tipo ej27rk/, (senos y cosenos), en un intervalo (0,T), x(t) puede escribirse como:

Valida para 0 < t < T donde f o = 1/T y N = B W/f o .
Aquí los Ck son los coeficientes del desarrollo en serie de Fourier de x(t) dados por

Hallados estos coeficientes, que son escalares, x(t) puede expresarse como:

Ahora bien, ya que una función de la forma e -j2ϖ·fo·t , tiene la energía localizada alrededor de k·f 0 ,la magnitud del coeficiente Ck indica el peso o contribución a la señal analizada de la componente de energía para f = k · f 0. Así que conociendo los Ck es posible determinar de la distribución espectral la energía de x(t).
Las funciones utilizadas como base de descomposición -j2ϖk·f·t , presentan una excelente localización en frecuencia (su transformada de Fourier es un delta alrededor de fo) lo cual permite conocer la contribución energética de las distintas frecuencias en x(t). Pero no se tiene información alguna de cómo evoluciona esta energía en el tiempo, pues las funciones e -j2ϖk·f·t , son armónicas y varían continuamente en el tiempo. En otras palabras la localización temporal de estas funciones es nula.
Para realizar un análisis t - f es necesario descomponer x(t) en una base compuesta por funciones localizadas en t y en f. Suponiendo una función ψ(t) tal que su energía este localizada tanto temporal como espectralmente. Si ψ(t) tiene su energía concentrada alrededor de f0, se puede esperar que ψ(a · t) la tenga en α· f 0 , así, partiendo de un factor de escala α, es posible generar una familia de curvas con su energía espectralmente localizada en distintas frecuencias.
Desarrollo experimental
Para el desarrollo del trabajo experimental se dividió el proceso en diferentes etapas que se describen a continuación.
1. Se realizó el análisis respectivo de una unidad MINDFLEX Duel (figura 6), para entender la técnica electrónica e identificar las partes del hardware (figura 7) que capturan las señales EEG. Las señales eléctricas se identificaron con un osciloscopio antes de su codificación y transmisión.

FIGURA 6 Unidad Mindflex, que cuenta con un micro controlador EEG producido por la empresa Neurosky, y mide la actividad eléctrica cerebral a través del Auricular que se ubica en el lóbulo frontal derecho del jugador. Tomado de [12] .
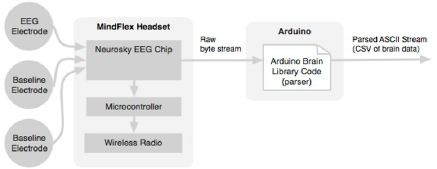
La captura e interpretación primaria de estas señales que provienen del lóbulo frontal conducen en una etapa posterior al diseño de la interface para control cerebral (BCI) basado en arduino. El proceso experimental que permite la obtención y procesamiento de datos se ilustra en la figura 8:
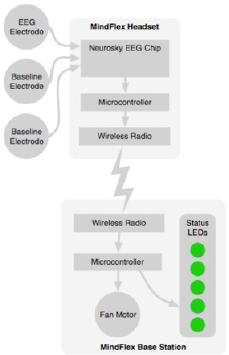
Hay tres electrodos ubicados en el auricular, cuya colocación para una configuración monopolar correcta, debe ser tal que un electrodo se ubique en el lóbulo prefrontal izquierdo, y los otros dos en una zona sin terminaciones nerviosas u óseas, que se comporten como una tierra para el circuito. La zona propicia para la configuración de la tierra es el lóbulo de la oreja que no presenta actividad nerviosa que pueda generar algún registro de voltaje para los electrodos. Los electrodos utilizados en este trabajo son superficiales (scalp), se ubican sobre el cuero cabelludo o la piel desde un solo canal y un punto de referencia o tierra constituido por las terminaciones nerviosas de la oreja. Internamente el auricular posee además, un chip diseñado por Neurosky, un micro controlador y un emisor de señales de radio.
Las señales encefalografícas captadas en el auricular del mindflex son enviadas al chip Neurosky donde son amplificadas y procesadas en forma tal que se generan ocho señales cuya amplitud depende de la actividad cerebral y en los rangos de frecuencias registrados en la tabla 1. Estas señales, se transmiten por conductores a un micro controlador Arduino Uno, (emulando el micro controlador interno del Auricular), para luego ser enviadas vía USB a un computador, en el cual a través de diseño de código de programación y con ayuda de diferentes librerías que ofrece la plataforma Arduino, se registran los datos obtenidos, en formato ASCII o CVS, facilitando su almacenamiento, despliegue o representación grafica en tiempo real. Una descripción mías detallada de como intervenir físicamente el auricular puede verse en [13].
2. Una vez conectado el Arduino al auricular se le instala la librería Brian Serial Out, de código libre y se agrega con IDE un código de trabajo que permita visualizar las señales transmitidas desde el auricular como datos CVS.
Para graficar se utiliza un software libre de aplicación conocido como Processing 2.2.1 el cual es compatible con Arduino y permite visualizar en tiempo real los datos obtenidos en formato CVS, y presentarlos como espectros de energía.
Es necesario Programar el Processing con extensión PDE, vincularlo al código escrito en IDE de Arduino, para lo cual se deben descargar dos librerías gratuitas prediseñadas conocidas como BrainGrapher.pde y control IP5. El código definitivo [14] contiene las plataformas (subcódigos) denominadas Brain grapher, Channel, ConnectionLigth, Graph y Monitor, que, en términos generales tras su vinculación, generan los parámetros necesarios para realizar las gráficas que muestran los cambios de las ondas cerebrales con el tiempo, como se observa en la figura 10. Todo el desarrollo de procesamiento y de interpretación de cada una de las señales obtenidas en los diferentes ejercicios que hacen referencia a los ritmos cerebrales en el ámbito de la frecuencia, están albergados en el código fuente de procesamiento en Arduino, donde se establecen cada uno de los patrones de entrada y salida desde las variables denominadas en el código como X, Y, W y H, asociadas al canal de transmisión IP5, con un tamaño de paquetes de datos desde 1024 bytes hasta 768 bytes a una velocidad de 9600 baudios. Esas señales son el modelamiento de cada una de las Wavelets [14].
Al representar gráficamente los datos procesados por Arduino contra el tiempo, se observan picos que corresponden de acuerdo al color, a la calidad de la señal, el nivel de atención, meditación, delta, theta, alfa baja, alfa alta, beta baja, beta alta, gama baja y gama alta (parte superior figura 10). Estos valores son discriminados por Neurosky para la modulación de la señal y la transmisión de los datos.
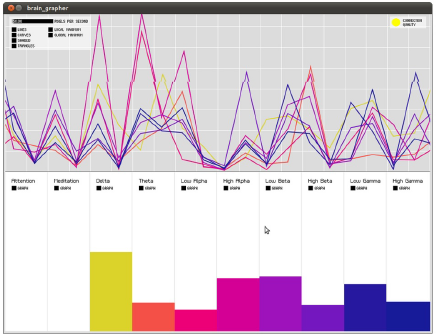
FIGURA 10 Visualización de la intensidad relativa de las señales cerebrales en el tiempo (triángulos) y por intervalos de frecuencia (rectángulos).
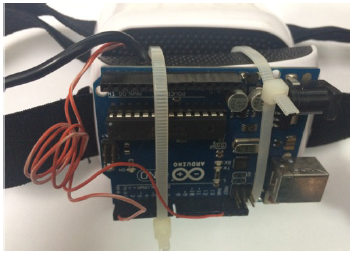
3. Para reducir el tamaño del equipo sin perder versatilidad ni funcionalidad, se reemplaza la placa Arduino Uno (10.1 cm de largo por 5.3 cm de ancho) por un Arduino pro- mini (3.3 cm de largo por 1.8 cm de ancho) al cual se le incorpora un sistema Bluetooth HC-06 compatible con Arduino que permite transmitir los datos en forma inalámbrica, y facilita la transmisión de datos a un dispositivo Android) [15,16].
Adicionalmente se agrega un módulo de conexión USB FTDI 232 que permite no solo ahorrar espacio, sino que representa una mejora en la velocidad de transmisión de datos. Dado que estos tres módulos (Arduino pro-mini, el HC-06 y el FTDI 232) son de tamaños similares, se facilita su ubicación dentro del auricular.
Finalmente se establece un protocolo en Arduino llamado "eyes blink", que detecta señales no aleatorias de baja intensidad imbuidas en el ruido y que permitan accionar la prótesis a través de los impulsos de voltaje generados por estas. Como resultado de esta detección, es posible escoger si se utiliza la señal obtenida desde el lóbulo frontal o la obtenida del parpadeo.
Posteriormente se enlaza el sistema través de un código que transforma las señales provenientes del parpadeo en señales eléctricas de potencia media las cuales accionan un actuador (en este caso un motorreductor), y a través de este y acoples mecánicos, se acciona la prótesis.
El sistema final con sus diferentes partes interactuantes y protocolos de comunicación se sintetiza en el diagrama de bloques de la figura 11 y su aspecto real con la descripción de cada una de sus componentes en la figura 12. Como se observa en la figura 12, el sistema consta de módulos independientes, lo cual facilita el servicio de reparación y cambio en caso de daño.
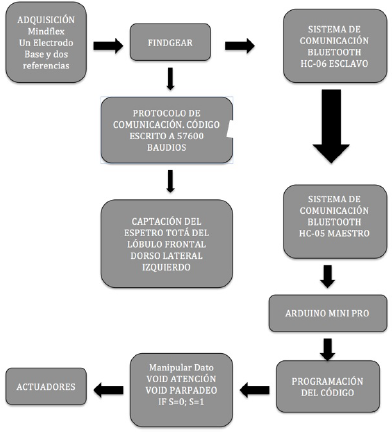
Figura 11 Diagrama de bloques funcional del sistema de pr_otesis de mano, controlada por se~nales EEG.
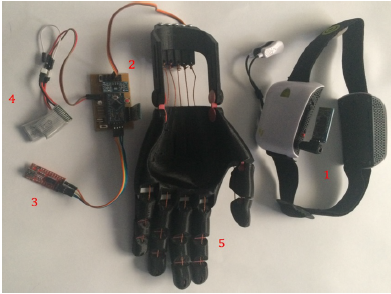
FIGURA 12 Estructura final del diseño. 1) Auricular: sistema de captación y envió de señales eléctricas, configurado básicamente con el módulo HC-04. 2) Modulo de recepción de señales, conformado por el Arduino Mini Pro y cuyo elemento de recepción es el módulo HC-05. 3) Modulo FTDI232: Encargado de posibilitar la conexión vía USB entre el Arduino Mini pro y un computador para hacer lectura del estado de las señales o captación de los niveles de POOR SIGNAL (ruido) que suministra el software. 4) Baterías de litio de 3.7v a 250 mAh, encargadas de la alimentación del servomotor (actuador), que fue diseñado con alimentación independiente para no afectar en caso de sobrecarga los diferentes módulos conectados en el sistema. 5) Prótesis diseñada por PROTOTYPE 3D (www.prototype3d.com.co).
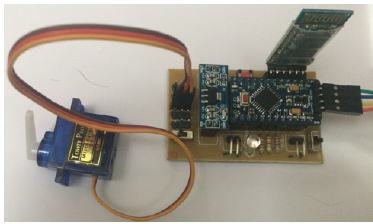
El código que hace posible el funcionamiento de la prótesis se inicia con la declaración de las variables de ejecución para cada uno de los pines del Arduino mini, así como la definición de las variables para cada una de las señales en sus respectivos rangos de frecuencia y a continuación los comandos de envío hacia el puerto serial de los datos recibidos, con la opción de selección de modo entre parpadeo o relajación que hacen que el actuador Figura 13, se accione en el momento adecuado. Mayores detalles pueden ser consultados en [14].
El diseño de la prótesis realizada con impresión 3D, se optimizó con el fin de que la adaptación de los servomotores garantice optima funcionalidad.
Conclusiones
Los protocolos de comunicación entendidos como un conjunto de reglas que gobiernan un intercambio organizado de bits a través de canales digitales pueden ser ejecutados a través de códigos de estructuras simples que proporcionan entendimiento y claridad en la ejecución de tareas de control de señales que, a través de actuadores, permiten la ejecución de tareas específicas.
La presencia de potenciales en las diferentes regiones cerebrales, especialmente en la región dorso lateral izquierda donde se realizaron las mediciones gráficas se identificaron como correspondientes a los niveles llamados de atención, meditación y relajación. La intensidad de las señales alfa, beta, gama, entre otras, que un individuo puede generar son controlables y reproducibles a través del entrenamiento y facilitan la personalización de la rutinas para un manejo controlado de la prótesis.
Las señales obtenidas a partir del ritmo alfa, establecidas mediante el canal de comunicación digital de la plataforma Arduino, requieren un flujo de comunicación cercano a los 57600 baudios con lo cual se garantiza un muestreo tal que reduce la razón señal/ruido, aumentando con ello la confiabilidad en el nivel de señal registrada. Este nivel se ajusta en el código programado.
La construcción de la prótesis bajo la plataforma desarrollada para un video juego (Matel), y basado en el análisis de señales, se convierte en una gran oportunidad en reducción de costos frente a otro tipo de prótesis que se encuentran en el mercado, reduciendo hasta en un 80 % su costo comercial y presentando una funcionalidad apropiada para respuestas eficientes en tiempo y ejecución de tareas simples.
Queda abierta la posibilidad de utilizar los auriculares de Minflex en posibles líneas futuras de trabajo, si se utilizan las señales de atención y la meditación disponibles en los auriculares. El desarrollo de un algoritmo adecuado, que relacione además del parpadeo, la atención y la meditación para crear una respuesta binaria que se podría utilizar para mover cualquier sistema teledirigido como coches, sillas o drones. Una posibilidad entre muchas factibles sería relacionar la atención con el movimiento de avance, la meditación con el movimiento de retroceso y el parpadeo para detención y/o validación de la respuesta.

