










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkRevista de Ingeniería
Print version ISSN 0121-4993
rev.ing. no.26 Bogotá July./Dec. 2007
Modelación de enclavamientos en subestaciones eléctricas de transmisión de energía utilizando Redes de Petri de alto nivel
Interlocking Schemes Models in Electrical Transmission Substation, Using High Level Petri Nets
Fredy Alberto Sanz
MSc. Director Grupo de investigación en Electrónica y Automática GEA, Docente, Institución Universitaria Salazar y Herrera, IUSH. Docente de Cátedra, Universidad Nacional de Colombia Sede Medellín e Instituto Tecnológico Metropolitano ITM. Medellín, Colombia.
fredsanz@gmail.com
Recibido 19 de septiembre de 2006, aprobado 14 de mayo de 2007.
PALABRAS CLAVES
Enclavamientos, maniobras, modelación, redes de Petri, subestaciones.
RESUMEN
El presente trabajo tiene como objeto proponer una metodología para modelar los principales Esquemas de Enclavamiento, para maniobras pertenecientes a las configuraciones de subestaciones del Sistema Eléctrico Colombiano, para un nivel de tensión de 230 KV. Se utilizará un formalismo matemático como lo son las Redes de Petri Jerárquicas de Alto Nivel (RdPJ) para la modelación de los esquemas de enclavamiento. Una vez obtenido el modelo en RdPJ se simula en STATEFLOW, herramienta computacional del MATLAB diseñada para trabajar con maquinas de estado finito, lo que implicaría la traducción de la RdPJ a un autómata finito.
KEY WORDS
Interlocking, switching, models, Petri nets, substations.
ABSTRACT
This paper has as objective to model the principal Interlocking Schemes of switching, that belongs to Substation configurations of the Colombian Electric System for a voltage level of 230 KV. The modeling of the Interlocking Scheme will be used in a mathematic formalism such as Hierarchical High Level Petri Nets (H.H.L.P.N.). Once having obtained the model in the (H.H.L.P.N.) it's simulated in STATEFLOW computational toolbox of MATLAB designed to work with state finite machines, that required translate the H.H.L.P.N. to automata finite.
INTRODUCCIÓN
Algunas de las funciones en el proceso de automatización de subestaciones son las que tienen que ver con los esquemas de enclavamiento. Un esquema de enclavamiento es un arreglo lógico que impide o permite la activación o desactivación de un dispositivo de corte de energía (interruptor, seccionador, cuchilla de tierra, etc.) o protección [1]. Los modelos y generalidades de los enclavamientos en subestaciones constituyen una parte esencial para comprender su funcionamiento, por lo que es necesario abordarlos desde sus componentes, restricciones y objetivos [2].
La modelación de los esquemas de enclavamiento que aparecen en cada una de las maniobras, puede ser representado por un formalismo matemático como lo son las Redes de Petri (RdP). Éstas se destacan por su naturaleza gráfica, soporte matemático simple, claridad en la descripción y facilidad para representar comportamientos complejos que incluyan secuencias, concurrencias, paralelismos, sincronizaciones, entre otros. Este formalismo permite la integración de sistemas de control y protección de subestaciones. En el caso de estudio específico se utilizará una extensión de ellas llamadas Redes de Petri Jerárquicas de alto nivel (Hierarchical High Level Petri Nets, HHLPN) [1] [3] [4].
Para fines prácticos del presente trabajo, las HHLPN se denominarán RdPJ. Este formalismo, basado en el estándar de RdP de alto nivel, trata de unificar las principales RdP (predicado / transición, C.P.N. y redes algebraicas) e incorpora los conceptos de modularidad, jerarquía y programación estructurada.
Una vez obtenido el modelo en RdPJ de cada maniobra, se hace necesario el uso de una herramienta de simulación que permita la verificación de la vivacidad de la red; para ello se analizaron varias alternativas, entre ellas el Petri net Simulator 1.0 y el Petri Net Toolbox de Matlab y se encontró que en la mayoría de los casos sólo sirven para simular redes de Petri ordinarias y en el mejor de ellos redes de Petri coloreadas, dejando por fuera la extensión de las Jerárquicas de alto nivel, que son las de éste caso de estudio. Considerando que el STATEFLOW es una herramienta para simular sistemas secuenciales a través de maquinas de estado finito (que se acopla a las restricciones que imponen los modelos en RdPJ dado que ambas concepciones manejan los conceptos de concurrencia, paralelismo y superlugares) se utilizará un arreglo de ésta como alternativa de simulación de las redes. Debe anotarse que aunque gráficamente difieran en algunos aspectos, el principio teórico permite una adaptación de la red de Petri jerárquica a un autómata finito sin salirse de su definición.
DEFINICIÓN DE LAS REDES DE PETRI JERÁRQUICAS DE ALTO NIVEL
Las redes de petri jerárquicas (RdPJ) se definen con una 8-tupla RdPJ = (S, ST, SA, PP, PT, PA, FS, FT) que satisfacen los siguientes requerimientos [5][6][7]:
- S es un conjunto finito de redes o subredes tal que:
 [8]
[8]
- ST Í T = Us Î S Ts es el conjunto de transiciones de sustitución.


- PP Í P= Us Î S Ps es el conjunto de los lugares puerto.

- PT es la función del tipo de puerto. Este define si PP es de entrada o de salida {in,out}.

- PA es una función de asignación del puerto. Está definida desde ST con una relación binaria tal que:

Sock(t) = , conjunto de lugares socket asociados a t.
Con las expresiones descritas, PA(t) se define como un conjunto de parejas ordenadas de lugares socket, que se asocian a una transición que pertenece al conjunto de transiciones de sustitución, y lugares puerto que se asocian a la subred asignada a esta transición.
- FS Í P es un conjunto de conjuntos de fusión de lugares considerados para ser idénticos en cada conjunto, es decir, ellos representan un solo lugar conceptual, tal que


- FT es una función que define el tipo de fusión. Está definida en los conjuntos fusión {global, red, instancia}.
METODOLOGÍA DE MODELACIÓN PROPUESTA
Considerando que el objetivo fundamental del presente estudio es establecer una metodología que permita la implementación de enclavamientos en subestaciones de alta tensión utilizando las redes de Petri, en busca de mayor seguridad y confiabilidad en sus maniobras, se estructura la terna Comprensión-modeloverificación. Ésta garantiza que el modelo de la RdPJ construida represente fielmente los enclavamientos de la maniobra. Finalmente el proceso de simulación como estrategia de verificación del mismo da lugar a los siguientes tres ítems:
- Analizar y comprender la maniobra y la secuencia adecuada para la realización de ésta.
- Construir el modelo en RdPJ correspondiente a la maniobra seleccionada.
- Verificar la vivacidad de la RdPJ de la maniobra a través de la simulación en el STATEFLOW.
APLICACIÓN DE LA METODOLOGÍA
Para ilustrar el modelo se considerará una subestación barra principal más barra de transferencia
ANÁLISIS Y COMPRENSIÓN DEL TIPO DE SUBESTACIÓN Y MANIOBRA SELECCIONADA
La maniobra seleccionada es la energización de un campo de línea a través del barraje principal (Figura 1). Dentro de esta maniobra es considerada también la desenergización en caso de ser solicitado por un mando externo que así lo indique. La descripción de los dispositivos se resume en la Tabla 1.
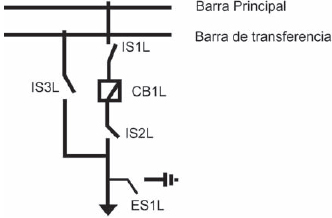
Figura 1. Configuración subestación barra principal más barra de transferencia.
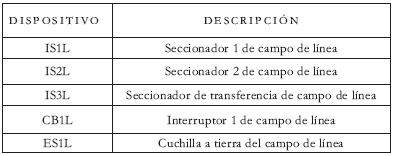
Tabla 1. Dispositivos campo de línea barra principal más transferencia.
La condición inicial es línea desenergizada; es decir, los dispositivos IS1L, IS2L, IS3L, CB1L, ES1L (Tabla 1) están en posición de abierto.
En la maniobra seleccionada, se consideraron los siguientes enclavamientos:
- No operar seccionadores bajo carga.
- Cuchilla de tierra ES1L normalmente abierta.
- Seccionador IS3L normalmente abierto.
Con el fin de garantizar los enclavamientos de la maniobra a través de la cual se desea energizar el campo de línea, se deben cerrar los dispositivos IS1L, IS2L, CB1L en el orden adecuado (Figura 2), cuando se presente la señal IN y se cumplan las condiciones que darán paso al cambio de estado de cada dispositivo.

Figura 2. Secuencia de energización del campo de línea.
El campo de línea permanecerá activo hasta que se reciba una señal externa OL , que daría inicio a la secuencia de apertura de los tres dispositivos que fueron cerrados inicialmente (IS1L, IS2L, CB1L) (Figura 3).

Figura 3. Secuencia de apertura del campo de línea.
Cuando se finaliza la secuencia de apertura se tienen condiciones iguales a las iniciales y se habilita nuevamente el campo de línea para ser energizado.
Si se observan las secuencias de maniobra de apertura y cierre del campo de línea (Figuras 2 y 3), el enclavamiento de no maniobrar seccionadores bajo carga se satisface con el orden de cierre o apertura de los dispositivos, ya que el interruptor es el que finalmente permite o interrumpe la circulación de corriente por el campo. Los otros enclavamientos (dispositivos IS3L y ES1L abiertos) dependen exclusivamente de la verificación de señales de entrada, entre el inicio de la secuencia de maniobra y el cambio de estado de los dispositivos; condiciones que si son insatisfechas impedirán la continuación de la maniobra.
CONSTRUCCIÓN DEL MODELO DE ENCLAVAMIENTO EN RED DE PETRI JERÁRQUICA
En el proceso de construcción de la RdPJ se tienen en consideración tres superlugares para la maniobra seleccionada (Figura 4):
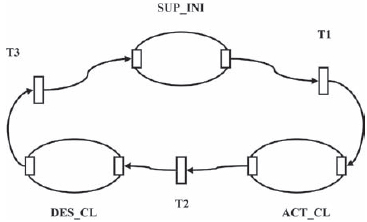
Figura 4. Red Jerárquica Campo de Línea.
Entre los tres superlugares se tienen tres supertransiciones, donde (Tabla 2):
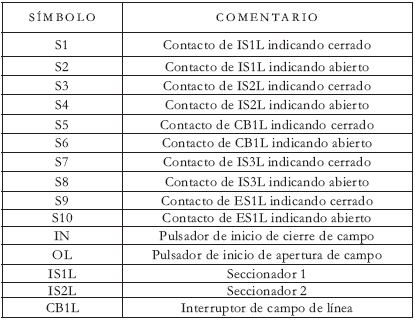
Tabla 2. Inventario de señales para energización del campo de línea.
Todo superlugar tiene en su interior un lugar de entrada y uno de salida, que están conectados respectivamente a los puertos (de entrada y salida), entre los cuales debe estar contenida la subred asociada al superlugar.
Dado que la red jerárquica de la maniobra seleccionada contiene tres superlugares, se explicará la forma como debe ser construida la subred interna asociada a cada uno. Inicialmente se tiene el superlugar SUP_INI, al cual no están asociadas variables físicas (apertura y/o cierre de dispositivos); por lo anterior, contiene únicamente los lugares LE1 de entrada y LS1 de salida, enlazados a través de la transición t0 sin condiciones. Es decir, la evolución de una marca del lugar LE1 hacia LS1 no estará condicionada por algún evento (la existencia de los lugares LE1 y LS1 en el superestado SUP_INI es necesario para conservar la misma estructura de diseño en todos los superlugares) (Figura 5).
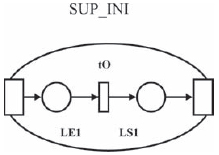
Figura 5. Superlugar SUP_INI.
Cuando se marca el superestado inicial (SUP_INI), inmediatamente es marcado también el lugar de entrada LE1 (ya que el puerto de entrada provoca que la marca evoluciones internamente). Posteriormente la marca evoluciona hacia el lugar de salida LS1, donde reposará hasta que el evento asociado a la supertransición T1 se verifique, dando lugar al marcado del superlugar ACT_CL y al lugar de entrada LE5; a su vez se desmarcaría LS1 y, por consiguiente, SUP_INI.
En la construcción de la subred del superlugar ACT_CL se emplearán los lugares de entrada LE5 y de salida LS5, además se hace necesario la utilización de lugares globales que indiquen el estado en que se encuentran los dispositivos que se van a maniobrar (IS1L_ OFF, IS2L_OFF, CB1L_OFF). Ellos se encuentran marcados de acuerdo a la condición inicial; adicionalmente es necesario utilizar los lugares globales que le indiquen a la red en qué estado quedarán los dispositivos después de ser maniobrados (IS1L_ON, IS2L_ON, CB1L_ON), que en consecuencia estarán desmarcados (Figura 6). Se finaliza con la extensión de los arcos de las transiciones hacia los lugares y se da por terminada la subrutina interna (Figura 7).
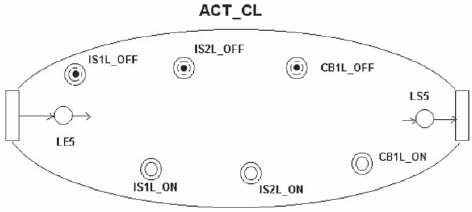
Figura 6. Superlugar con lugares globales.
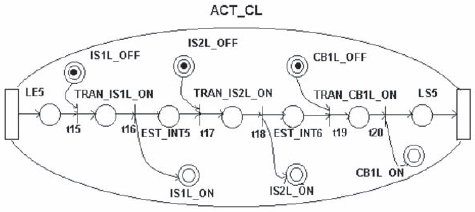
Figura 7. Superestado ACT_CL con subrutina interna.
De la misma forma como se procedió para el superlugar ACT_CL se hace para DES_CL (Figura 8).
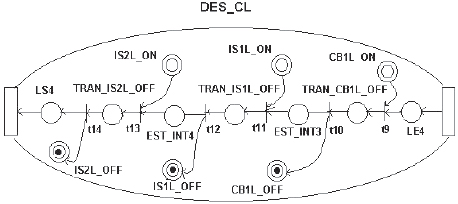
Figura 8. Superestado DES_CL.
SIMULACIÓN DE LA RDPJ DE LA MANIOBRA EN EL STATE FLOW
Dado que las RdPJ hacen uso de los conceptos de concurrencia y paralelismo se hace necesario hacer uso de un diseño estructurado que permita simular un sistema concurrente en un software concebido para sistemas secuenciales. Dicho diseño consiste en construir un modelo (en el STATEFLOW) de cada dispositivo operacional de la subestación y otro para manejar la jerarquía de la RdPJ. Dicho diseño debe representar funcionalmente la RdPJ; es decir, que la lógica de activación y desactivación de los lugares y la verificación de las transiciones correspondan a las de la red diseñada, ambas representaciones en STATEFLOW se encuentran en la Figura 9.
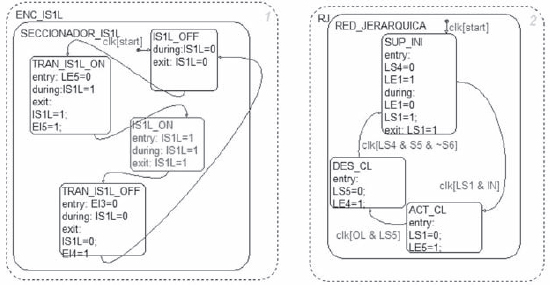
Figura 9. Estructuras STATEFLOW para simular jerarquía y seccionador IS1L
La simulación está provista de una interfaz gráfica en el SIMULINK (Toolbox de Matlab) que permite forzar las señales de entrada a la red y verificar, a su vez, los cambios de estado, lo cual proporciona un método para comprobar la vivacidad de la RdPJ. Pueden estructurarse pruebas que sometan a cambio cada señal y verificar que sólo se producirá la evolución de las marcas ante el enclavamiento correcto.
CONCLUSIONES Y SUGERENCIAS
REFERENCIAS
[1] J. L. Pinto de Sá and J. Damásio. Coordination of automatic control functions in transmission substation, using Petri Nets. IEEE Transaction on Power Delivery, Vol. 7, No. 1, January 1992. [ Links ]
[2] Z.Z. Zhang, G.S. Hope and O.P. Malik. A knowledge-based approach to optimize switching in substation. IEEE Transactions and Power Delivery, Vol. 5, No 1, January 1990. [ Links ]
[3] J. L. Pinto de Sá and J. P. Sucena. Desing & verification of concurrent switching sequences with Petri Nets. IEEE Transaction on Power Delivery, Vol. 5, No. 4, November 1990. [ Links ]
[4] J. L. Pinto de Sá and J. P. Sucena. A multitasking software architecture to implement concurrent switching sequences designed with Petri Nets. IEEE Transactions on Power Delivery, Vol 6, No. 3, July 1991. [ Links ]
[5] E. Németh and K. M. Hangos. Multi-scale process model description by generalized hierarchical CPN models. Research Report SCL- 002/2004 [ Links ]
[6] M. Dotoli, M.P. Fanti, A. Giua and C. Seatzu. First-order hybrid petri nets. an application to distributed manufacturing systems. Hybrid systems applications. Italia. 2006 [ Links ]
[7] M. Silva. Las Redes de Petri en la automática y la informática. Ed. AC. Thomspon, 2002. [ Links ]
BIBLIOGRAFÍA
Brand K. P. and J. Kopainky.Systematic design of automation, protection, and control in substations. IEEE Transactions on Power Apparatus and Systems, Vol. PAS-103, No. 9, September 1984. [ Links ]
Brand K. P., Kopainky J. and Wimmer W.:Topology- Based interlocking of electrical substation. IEEE Transaction on Power Delivery, Vol. PWRD-1, No.3, July 1986. [ Links ]
Brezovan M. Formals sintaxis and dynamic semantics of hierarchical high level Petri Nets, Department of Computer Engineering, University of Craiova, 2001. [ Links ]
Erzsebet N. Deadlock analysis in hierarchical petri nets. Doctoral Thesis Veszprem, 2002 [ Links ]
Furtado R., Cordeiro G. and Pastôra R. Método de implementação de sistema de diagnóstico de falta para subestações baseado em redes de petri. Revista controle & automação, Vol.16 No.4, outubro, novembro e dezembro 2005. [ Links ]
Hope G. and Cory B.J. Development of Digital Computer Programs for the Automatic Switching of Petri Networks. IEE Transaction on Power Apparatus and Systems, Vol. PAS-87, No.7, July 1968. [ Links ]
Sachdev M. S., Dhakal P. and Sidhu T. S. A computer-Aided technique for generating substation interlocking schemes. IEEE Transactions on Power Delivery, Vol. 15, No. 2, april 2000. [ Links ]
Yoshizawa J., Ogi H., Takano T. and Matsumoto K. An automatic knowledge acquisition method for switching sequences and its evaluation. IEEE Transactions on Power Systems, Vol. 9, No 2, May 1994. [ Links ]

