










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkRevista de Ingeniería
Print version ISSN 0121-4993
rev.ing. no.27 Bogotá Jan./June 2008
Control de Copitarsia decolora en cultivos de flores mediante la emisión de frecuencias
Control of Copitarsia Decolora in Flower Growing by Issuing Frequencies
Hernán Paz
MSc. Profesor, Facultad de Ingeniería Electrónica, Escuela Colombiana de Ingeniería Julio Garavito. Bogotá D.C., Colombia.
hpaz@escuelaing.edu.co
Marcela Rodríguez
MSc. Profesora, Facultad de Ingeniería Electrónica, Escuela Colombiana de Ingeniería Julio Garavito. Bogotá D.C., Colombia.
Diana González
Ingeniera electrónica. Investigadora, Escuela Colombiana de Ingeniería Julio Garavito. Bogotá D.C., Colombia.
Cesar Galarza
Ingeniero electrónico. Investigadora, Escuela Colombiana de Ingeniería Julio Garavito. Bogotá D.C., Colombia.
Edison Torrado-León
Biólogo, Entomólogo. Profesor Asociado, Facultad de Agronomía, Universidad Nacional de Colombia. Bogotá D.C., Colombia.
Recibido 27 de octubre de 2006, aprobado 14 de mayo de 2007
PALABRAS CLAVES
Evasión, dispositivo electrónico, flores, llamadas de ecolocación, plagas, simulación.
RESUMEN
Una de las plagas interceptadas por el Servicio de Inspección de Salud de Animales y Plantas (APHIS) de Estados Unidos, en las exportaciones de algunas especies de flores de corte de Colombia, es Copitarsia spp. El presente estudio evaluó la respuesta evasiva de Copitarsia decolora (Lepidoptera: Noctuidae) mediante la simulación de llamadas de ecolocación de murciélagos como propuesta para el manejo en salas de poscosecha de flores, bajo condiciones controladas. Las formas de las señales de ecolocación de los murciélagos se tomaron de algunas muestras de quirópteros insectívoros y se simularon por medio del software Sound Ruler, determinando los parámetros fundamentales que caracterizan las llamadas, como amplitud, frecuencia y forma, entre otros. A partir de esta caracterización, se diseñó y construyó un sistema electrónico capaz de reproducir las llamadas de ecolocación. Se probó el sistema, emitiendo la señal reproducida hacia una muestra de Copitarsia, y se observó una reacción evasiva frente a dicha señal.
KEY WORDS
Evation, electronic device, echo-location calls, flowers, plagues, simulation.
ABSTRACT
One of the plagues intercepted by the Health's supervisory Service of Animals and Plants (APHIS) of United States in the exports of some species of flowers of court of Colombia is Copitarsia spp. The present study evaluated the evasive answer of Copitarsia decolora (Lepidoptera: Noctuidae) by means of the simulation of calls of echolocation of bats like proposal for the handling in rooms of post-harvest of flowers, under controlled conditions. The shapes of the signs of echo-location of the bats took of some samples of insectivorous quirópteros and were simulated by means of the software Sound Ruler, determining the fundamental parameters that characterize the calls as their width, frequency and it forms, between other ones; starting from this characterization, it was designed and built an electronic system able to reproduce the echo-location calls. The system was tried, emitting the sign reproduced toward a sample of Copitarsia, and an evasive reaction was observed in front of this sign.
INTRODUCCIÓN
El valor de las exportaciones de flores representa el segundo renglón del sector agropecuario en Colombia, después del café; para el año 2003 este valor fue de US$806 millones. Una de las grandes limitaciones que tiene este mercado es el problema de las plagas1 que frecuentemente las acompañan en los sitios de destino de las exportaciones. El Servicio de Inspección de Salud de Animales y Plantas (APHIS) de Estados Unidos realiza revisiones sistemáticas a las flores exportadas a ese país, para evitar la entrada de plagas cuarentenarias [1]. Para aquellas plagas encontradas2, especialmente lepidópteros del género Copitarsia3, en los embarques de flores, se genera una fumigación, la devolución completa del cargamento o la incineración del mismo [2].
En Colombia, las especies de Copitarsia son conocidas como muques o cogolleros y, de acuerdo con el Instituto Colombiano Agropecuario ICA [3], la especie registrada en Colombia es C. consueta (Walker) o C. incommoda, sinónimo actualmente válido para esta especie [4]. Recientemente, estudios realizados por Torrado-León et al. [5] demostraron que una de las especies presente en cultivos de flores de corte de la sabana de Bogotá es C. decolora.
El manejo de estas plagas por lo general se realiza en los cultivos de flores aplicando productos químicos o biológicos, con el fin de disminuir sus poblaciones y evitar que lleguen a las salas de poscosecha huevos o larvas. Sin embargo, estos métodos presentan un alto costo y generan daños en el medio ambiente. Este proyecto de investigación, que es patrocinado por la Fundación para la Promoción de la Investigación y la Tecnología del Banco de la República, y que se desarrolla interdisciplinariamente con la Facultad de Agronomía de la Universidad Nacional de Colombiasede Bogotá, hace una propuesta de control novedosa y altamente ecológica4, que consiste en el diseño y construcción de un dispositivo electrónico de emisión de frecuencias de ultrasonido que simula la presencia del predador natural de la plaga, el murciélago, para impedir el ingreso de la Copitarsia decolora a los lugares de empaque de flores, salas de poscosecha. En la primera y segunda fases del proyecto, ya concluidas, se realizó una revisión bibliográfica sobre la fisiología auditiva de la polilla, sus conductas frente a la presencia del predador; así mismo, se identificaron los tipos de señales, nivel de intensidad, duración y frecuencias que emiten las especies de murciélagos cuando cazan a sus presas. Caracterizada la llamada de ecolocación, se diseñó, construyó y probó un sistema electrónico que simuló dicha señal. Toda la información relacionada a los anteriores aspectos se presenta de forma resumida en este artículo.
BIOLOGÍA DE C. DECOLORA
El género Copitarsia decolora es de origen chileno, pero con el paso de los años ha ido extendiendo su presencia en todo el continente americano, mediante movimientos migratorios ocasionados por el fototactismo positivo que, al parecer, corresponde a un comportamiento de orientación con la reflexión de la luz que tienen las diferentes fases de la luna [4, 7]. Se han registrado 21 especies para este género, distribuidas desde México hasta Chile.
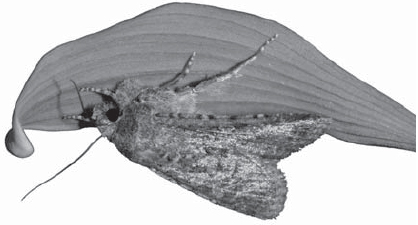
Figura 1. Adulto de Copitarsia decolora. Foto Edison Torrado-León 2006®
Este lepidóptero es un animal nocturno que cuenta con un sistema auditivo sofisticado, el cual ha evolucionado con el paso de los años, de modo que le permite detectar la presencia del depredador (murciélago) y evadir su ataque realizando giros abruptos, vuelos en picada y otros movimientos instantáneos, como un mecanismo de defensa [6].
Los oídos de las polillas son sensibles a sonidos en un amplio rango de frecuencias. Se considera que este rango está entre 3 y 150KHz. Así mismo, la sensibilidad auditiva de la polilla tiende a reflejar las frecuencias locales e intensidades de los sonidos de murciélagos [8, 9, 10]. Olivares y Angulo [4] realizaron una descripción del tímpano de Copitarsia decolora (Copitarsia turbata), sin embargo, no describen las frecuencias de ultrasonidos en las cuales éstos son sensibles.
Las llamadas de ecolocación dependen de la especie. Pueden ser señales moduladas en amplitud o frecuencia, o señales pulsantes (5/50/100 pulsos/seg.), de intensidad variable (75-110dB-SPL), corta duración (5-35mseg.) y alta frecuencia (15-70KHz); aunque cambian predeciblemente en dichas características a medida que se hace progresivo el ataque [11].
EL MURCIÉLAGO, DEPREDADOR NATURAL
Los murciélagos son mamíferos pertenecientes a la orden de los Quirópteros. Hay casi 1000 especies, pertenecientes a quince familias alrededor del mundo, de las cuales tres son hematófagos, dos tercios insectívoros, un tercio frugívoros y nectívoros, y cerca de 1% carnívoros. La anatomía y morfología de los murciélagos están relacionadas con los hábitos alimenticios, lo cual genera las distintas estructuras físicas que posee cada especie. Se ha considerado que estas formas se relacionan con la emisión de los llamados de ecolocalización.
Para la simulación del llamado de ecolocación del murciélago se estudiaron las especies Tadarida brasiliensis y Myotis chiloensis por su presencia en la Sabana de Bogotá. Sin embargo, se escogió la Tadarida brasiliensis (Molossidae) debido a que estudios realizados por Kunz et al. [12] demuestran que su dieta depende en un 34% de lepidópteros. La Tadarida brasiliensis morfológicamente es de estructura robusta de gran envergadura (aproximadamente 6.04cm de longitud y 11.95gm de peso), con alas largas y angostas que le permiten un vuelo rápido, impidiéndole maniobrar en lugares cerrados como bosques. Sus velocidades medias [13] se encuentran desde 6,0m/s [14] a 11,3 m/s [15]. Por su parte, la especie Myotis chiloensis que habita sur América, otros continentes e islas, se localiza en lugares cercanos a ríos, zonas áridas, bosques y sabanas. Este murciélago es pequeño, endémico, de aproximadamente de 9cm de largo y 6gm de peso [16], y se caracteriza por tener un vuelo lento.
ECOLOCACIÓN
El sistema de ecolocación es un mecanismo de percepción sensorial con el cual algunos animales se orientan, detectan obstáculos, se comunican entre sí y cazan, mediante la interrelación con el medio ambiente. Los llamados de ecolocación son sonidos generados en la laringe por la contracción de los músculos cricotiroideos y modificados con las formaciones bucales y nasales; se basan en el Efecto Doppler5 y son emitidos en frecuencias de ultrasonidos generalmente por encima del límite auditivo humano.
Cuando los llamados de ecolocación emitidos por el murciélago colisionan contra los objetos que se encuentran en su camino, se modifican y retornan en forma de eco con variaciones en sus parámetros: frecuencia, ángulo y amplitud; estas señales son captadas por las orejas, convertidas a señales eléctricas en los tímpanos y transmitidos al cerebro. Las diferencias relativas entre la información recibida y la señal emitida originalmente [17], le permiten construir una representación exacta de los objetos de su entorno, lo que le da una ubicación espacial. Estos sonidos son usados especialmente por los murciélagos para localizar a su presa, identificar su forma, tamaño, velocidad y posición antes de atacar.
Las frecuencias de emisión del murciélago pueden variar desde 9kHz hasta 200kHz según la especie [18]; la frecuencia de los llamados de ecolocación no es fija, aumenta a medida que se acercan a sus presas. Por su parte, el rango de escucha de las polillas es de 20KHz a 50KHz. Dada esta diferencia, se puede afirmar que el sistema auditivo de las polillas no es sensible a los sonidos emitidos por todas las especies de murciélagos.
En las Figuras 2a y 2b se muestra una señal de cacería emitida por la especie Tadarida brasilensis. Esta señal se caracteriza por estar modulada en amplitud, con una portadora de frecuencia variable que oscila entre 26KHz a 47KHz.
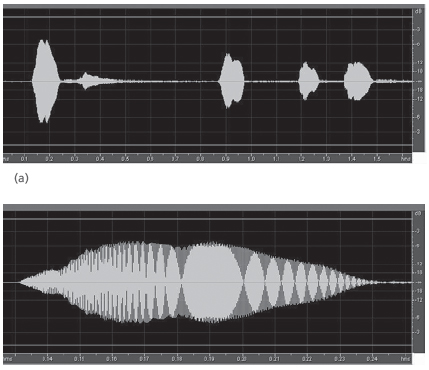
Figura 3. Llamada de ecolocación de especie Tadarida brasilensis. (a) Envolvente de la señal modulada AM. (b) Características de la señal portadora. Las señales de frecuencia contra tiempo fueron simuladas en Proteus 6 Professional.
La especie Myotis chiloensis genera señales de ecolocación de frecuencias altas: en el rango de 47KHz a 105KHz (Figuras 3a y 3b).
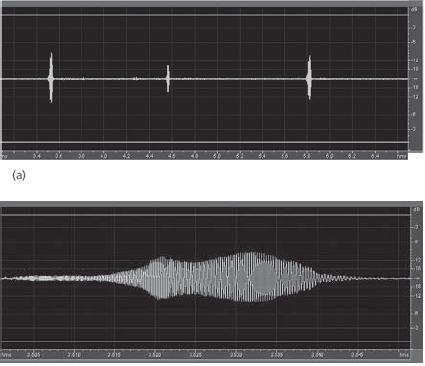
Figura 3. Señales de ecolocación de Myotis chiloensis.(a) Envolvente de la señal modulada AM. (b) Características de la señal portadora. Las señales de frecuencia contra tiempo fueron simuladas en Proteus 6 Professional.
Al comparar las características de cada una de las señales se puede confirmar que la señal más apropiada para continuar con la investigación es la emitida por la Tadarida brasiliensis, debido a que las señales de ecolocación se encuentran en el rango de frecuencias de 20KHz a 50kHz, que corresponde al intervalo de escucha del lepidóptero Copitarsia decolora.
METODOLOGÍA
Para el diseño y construcción del sistema electrónico que repele lepidópteros del género Copitarsia decolora se desarrollaron las siguientes etapas:
ANÁLISIS DE LLAMADAS DE ECOLOCACIÓN
Fue necesario conocer la forma y los parámetros característicos de las señales de ecolocación de los murciélagos; por esta razón, se analizaron algunas muestras de las llamadas de murciélagos insectívoros usando el software Sound Ruler. La adquisición de las señales se efectuó con equipos especializados, como Anabat y Pettersson Elektronik; que permiten grabar señales de ultrasonido (20KHz a 150kHz) y trasladarlas a escala, a señales audibles para el ser humano (20Hz a 20kHz). Estos equipos muestrean a 44.1kHz las señales análogas, las codifican en palabras de código de 16 bits y las almacenan en archivos digitales, con formato WAV; estas señales digitales se procesan en el software Proteus 6 Professional representando gráficas en varios dominios: amplitud-tiempo, frecuencia- tiempo, amplitud-frecuencia; sobre las cuales se puede identificar fácilmente los parámetros característicos de las señales de ecolocación.
En las Figuras 4 a 6 se muestran las diferencias de los rangos de frecuencias y niveles de intensidad de las señales.
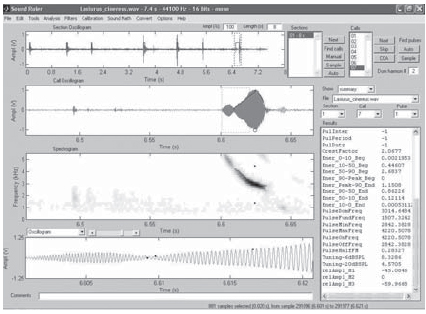
Figura 4. Señales emitidas por el murciélago de la especie Lasiurus cinereus y procesadas en el software software Sound Ruler.
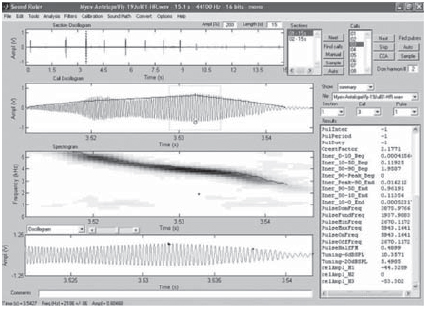
Figura 5. Señales emitidas por el murciélago de la especie Myotis evotis y procesadas en el software software Sound Ruler.
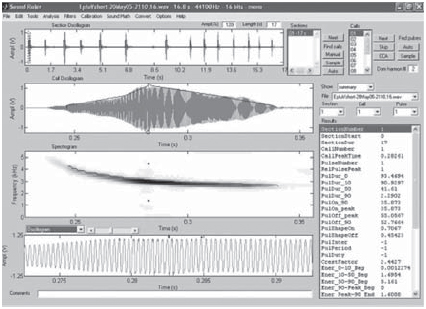
Figura 6. Señales emitidas por el murciélago de la especie Eptesicus fuscus y procesadas en el software software Sound Ruler.
Al examinar las tres figuras anteriores, se concluye que los murciélagos generan primero la señal de más alta frecuencia y la van disminuyendo en forma no lineal hasta alcanzar unas frecuencias mínimas (Tabla 1).
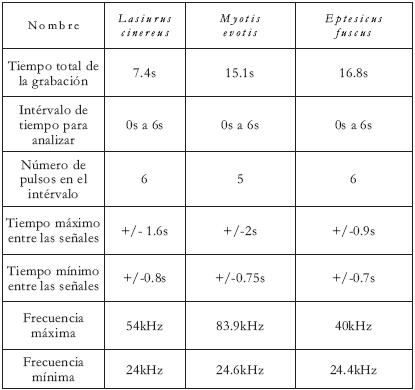
Tabla 1. Parámetros principales de las llamadas de ecolocación.
Otro parámetro importante de las señales de ecolocación es la amplitud. En la Figura 7, se representa una muestra de la señal de la especie Eptesicus fuscus, que varía su amplitud desde un nivel de cero voltios hasta un valor máximo de 1 voltio, con un crecimiento no lineal; después decrece hasta alcanzar de nuevo el valor de cero. En dicha señal se reconoce un sistema oscilatorio con amplitud variable conforme transcurre el tiempo y oscilaciones que no tienen la misma frecuencia. Por estas razones, es posible concluir que se trata de una señal modulada en amplitud6 .
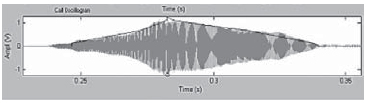
Figura 7. Representación (amplitud contra tiempo) de la señal emitida por la especie Eptesicus fuscus, cuando caza. Señal simulada en el software Sound Ruler.
DISEÑO DE DISPOSITIVO
Se basó en la simulación de las características principales de las llamadas de ecolocación de los murciélagos. Estas llamadas están compuestas por dos señales: una de baja frecuencia (modulante) y otra señal de alta frecuencia, que realiza un barrido ultrasónico variable (portadora). Las etapas que conforman el dispositivo se muestran en el diagrama de bloques de la Figura 8.
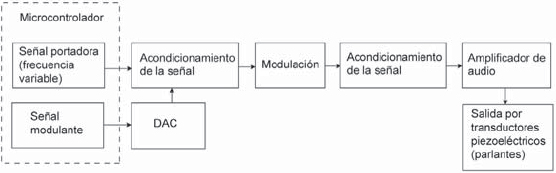
Figura 8. Diagrama de bloques sobre el funcionamiento del dispositivo.
Por medio del microcontrolador se generaron las señales portadora y moduladora. La señal portadora se conformó con un tren de pulsos cuadrados con frecuencia variable en un rango entre 26k y 47kHz: La señal modulante es una señal análoga que fue convertida desde una señal digital a través de DAC; la señal modulante fue programada para que su amplitud varíe entre un rango de 4 a 5 Voltios. En la Figura 9 se muestra la señal modulada, después del procesamiento.
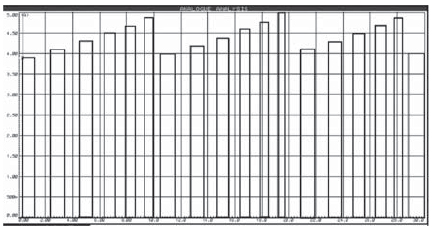
Figura 9. Representación (amplitud contratiempo) de la señal modulada en amplitud. Simulación realizada con el software Proteus 6 Professional
Las señales portadora y moduladora ingresan a una primera etapa de acondicionamiento para ajustar sus respectivas amplitudes, y de acoplamiento de impedancias entre el microcontrolador y el circuito modulador.
Al finalizar este tratamiento, son trasladadas a la etapa de modulación. En la Figura 10 se observa la señal resultante de la modulación.
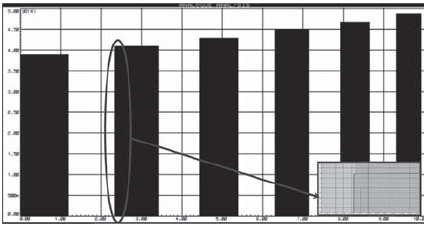
Figura 10. Señal registrada al concluir la modulación. Simulación (amplitud contratiempo) realizada con Proteus 6 Professional.
La señal modulada pasa a la segunda etapa de acondicionamiento, en donde se modifica su nivel de amplitud entre 0 y 1 Voltio; estos valores son los adecuados para enviarlos a la etapa de amplificación. El factor de amplificación de esta etapa es de 30 voltios, suficiente para emitirla al medio ambiente a través de los transductores piezoeléctricos.
Estos transductores fueron dispuestos en un arreglo lineal (Figura 11), en el cual los elementos son centrados a lo largo de una línea recta con igual distancia; esta red tiene como objeto maximizar el área de cobertura, optimizar el número de parlantes, reduciendo costos, y usar adecuadamente el medio de propagación de la señal, para finalmente representar una fuente de emisión de llamadas de ecolocación simuladas.

Figura 11. Red lineal de parlantes.
PRUEBAS
- Ubicación: se realizaron en el Laboratorio de Comportamiento de Artrópodos y otros Invertebrados de la Facultad de Agronomía, Universidad Nacional de Colombia, sede Bogotá.
- Materiales: 1) Se evaluaron 3 especímenes del género Copitarsia decolora de no más de tres días de edad. 2) Cabina controlada de 100X50X60 cm, con paredes de 1 en tela negra no tejida en fibra de vidrio Black Theater®; éste es un sistema acústico y lumínico con propiedades de aislamiento térmico y acústico; el material con el que fue construido tiene una absorción acústica NRC - Coeficiente de Reducción de Ruido - 0.7, el cual permitió que a las polillas les llegue un sonido limpio y no se generen ruidos adicionales que afecten el experimento. 3) A través de una cámara de video 15CC35NV-1 de 600 Líneas horizontales de visión nocturna conectada a un medio digital consistente en una tarjeta de video Pinnacle System®, acoplada a una tarjeta gráfica de última generación y una caja externa de conexiones, se registraron los eventos de la emisión de sonidos. La captura de imágenes se realizó con el software licenciado System Liquid Edition PRO para Windows XP.
- Procedimiento: Se liberaron tres ejemplares de Copitarsia decolora con el dispositivo activado y se registró el comportamiento de las polilla; para el desarrollo de las pruebas se siguió cuatro esquemas de conexión (Figura 12).
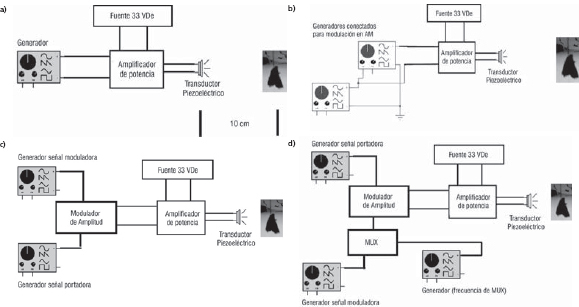
Figura 12. Esquemas de conexión del sistemas electrónico que simula las llamadas de ecolocación del murciélago. a) Con un generador. b) Con dos generadores. c) Con dos generadores y un modulador externo. d) Con tres generadores y dos circuitos modulador y multiplexor externo.
Cada uno de los esquemas de conexión tenía un protocolo de mediciones con un objetivo e hipótesis (Tabla 2). El sistema se evaluó en el transcurso del día y con un recinto oscuro, que simula horas de la noche.
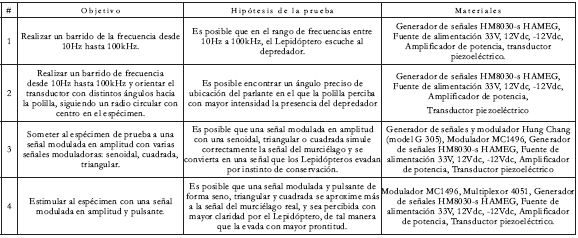
Tabla 2. Detalles del protocolo seguido con los cuatro esquemas de conexión.
RESULTADOS
Al realizar las pruebas del dispositivo electrónico sobre los especímenes del género Copitarsia decolora (Lepidóptero: Noctuidae) se observaron una serie de movimientos alares con las siguientes características: 1) Temblor en la punta alas, 2) Bloqueo de los músculos alares, 3) Bloqueo de las alas, 4) Movimientos alares bruscos. Estos efectos condujeron a los especimenes de prueba a realizar vuelos erráticos y vuelos en picada. Es importante destacar que el bloqueo de los músculos alares se observó cada vez que el espécimen era expuesto al cambio de nivel de la señal emitida; más exactamente, cuando ésta realizaba la transición entre un nivel bajo (amplitud de cero voltios) a un nivel alto (amplitud de 1 voltio).
LÍMITES DE EXPOSICIÓN DE LAS PERSONAS A ONDAS DE ULTRASONIDO
El artículo 149 de la Ley 09 de 1979, dicta que todas las formas de energía radiante, distintas de las radiaciones ionizantes que se originen en lugares de trabajo, deberán someterse a procedimientos de control para evitar niveles de exposición nocivos para la salud o eficiencia de los trabajadores.
Sin embargo, se puede afirmar que el impacto de las ondas de ultrasonido7 sobre la salud de los trabajadores que empacan las flores en los cuartos de poscosecha es una posibilidad; pero que la incidencia, de acuerdo a las estadísticas existentes en otras aplicaciones con emisiones de ultrasonido en bandas de frecuencia similares (dispositivos electrónicos para repulsión de roedores, sensores mediante el principio de ultrasonido, etc.) es tan insignificante que no impide el desarrollo del dispositivo y la puesta en funcionamiento. Por otra parte, las emisiones de radiación de los transductores electrónicos (parlantes) no superan los límites de intensidad de señal máximos permitidos por la siguiente tabla.
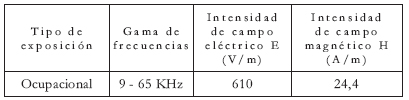
Tabla 3. Límites máximos de exposición según la frecuencia de operación. Fuente: Decreto 195 del 31 de Enero del 2005 (tiene por objeto adoptar los límites de exposición de las personas a los campos electromagnéticos producidos por estaciones radioeléctricas en la gama de frecuencias de 9 KHz a 300 GHz).
CONCLUSIONES
El sistema auditivo de las polillas puede ser estimulado por medio de señales en el rango de ultrasonido.
El rango estimado según las pruebas es desde 28kHz hasta 47KHz aproximadamente.
Los movimientos halares vistos y registrados corresponden a los esperados; dentro de estos movimientos se destaca el bloqueo de los músculos halares y los vuelos erráticos que realizan al ser expuestos a la señal de prueba.
NOTAS AL PIE
1 El término genérico de plaga en la agricultura designa a cualquier organismo que afecta a un cultivo, ya sea en forma directa o indirecta, causando pérdidas de importancia económica.
2 Entre las plagas interceptadas se encuentran pulgones, coleópteros, moscas, chinches, trips y polillas; este último es el que presenta mayores interceptaciones y se reconoce dentro de este género a una polilla denominada Copitarsia.
3 El total de individuos de este género interceptados por APHIS entre Enero de 2000 y Marzo de 2002 de importaciones de flores procedentes de la sabana de Bogotá fue de 600 individuos, para un total de 30.17% del total de las plagas reportadas [1].
4 Un aspecto que no se ha estudiado es la repelencia de los adultos con sonidos simulados de sus enemigos naturals. Los machos y hembras de esta polilla presentan un par de tímpanos ubicados en el tórax, los cuales les han servido a todas las polillas de la familia Noctuidae y otros insectos, como un mecanismo de defensa o antidepredación, debido a que perciben los sonidos que emiten los depredadores para localizar sus presas [6].
5 Basado a su vez en el siguiente fenómeno: un observador situado en una posición fija, recibe las ondas sonoras desde una fuente en movimiento; el sonido producido será percibido en un tono más alto (esto es más agudo) a medida que la fuente se acerca al observador y en un tono más bajo (grave) a medida que se aleja [16].
6 La modulación en amplitud consiste en modificar la amplitud de una señal de alta frecuencias conforme cambia la señal modulante de baja frecuencia.
7 El ser humano puede escuchar sonidos en el rango de 20Hz a 20KHz, mientras que los perros y los gatos tienen capacidad auditiva hasta 27 kilociclos por segundo.
REFERENCIAS
[1] J.J. Guerra y D. Forero. Principales interceptaciones de plagas en flores provenientes de la Sabana de Bogotá en el puerto de Miami y su implicación fitosanitaria. Revista Asocolflores, No. 62, 2002, pp. 50 – 58. [ Links ]
[2] Asocolflores. Procedimientos para la inspección fitosanitaria en Miami: Mejor estar informados para evitar fumigaciones innecesarias. Noticias Frescas, No. 185, 2005, pp. 15. [ Links ]
[3] ICA. Lista de insectos dañinos y otras plagas en Colombia. Boletín Técnico. Instituto Colombiano Agropecuario, No. 43. 1976, pp. 484. [ Links ]
[4] A.O. Angulo y T. S. Olivares. Actualización taxonómica de las especies de Copitarsia Hampson 1906, (Lepidoptera: Noctuidae: Cucullinae). Gayana Zoología, Vol. 67, No.1, 2003, pp. 33 - 38. [ Links ]
[5] E. Torrado-León, R. Lee, F. Serna, N. Quimbayo y S.R. Muñoz. Reconocimiento de Noctuidae (Lepidoptera) plaga en cultivo de flores. Memorias VIII Congreso Técnico Flores 2005, Bogotá, 26 de agosto. 2005. pp. 40-42. [ Links ]
[6] A.P. Norman, G. Jones and R. Arlettaz. Noctuid moths show neural and behavioural responses to sounds made by some bat-marking rings. Animal Behaviour, No. 57, 1999, pp. 829–835 [ Links ]
[7] M.R. Tucker. Light-trap catches of African armyworm moths, Spodoptera exempta (Walker) (Lepidoptera: Noctuidae), in relation to rain and wind. Bulletin of Entomological Research, No. 73, 1983, pp. 315-319. [ Links ]
[8] D.A. Walters. The peripheral auditory characteristics of noctuid moths: information encoding and endogenous noise. The Journal of Experimental Biology, No. 199, 1996, pp. 857–868. [ Links ]
[9] G. Jones, A. Barabas, W. Elliott and S. Parsons. Female greater wax moths reduce sexual display behavior in relation to the potential risk of predation by echolocating bats. Behavioral Ecology, Vol. 13, No.3, 2002, pp. 375–380. [ Links ]
[10] J.H. Fullard, K.E. Muma and J.W. Dawson. Quantifying an anti-bat flight response by eared moths. Candian Journal of Zoology, No. 81, 2003, pp. 395–399. [ Links ]
[11] N. Skals, D. Plepys, A. M. El-Sayed, C. L. Ofstedt and A. Surlykke. Quantitative analysis of the effects of ultrasound from an odor sprayer on moth flight behavior. Journal of Chemical Ecology. Vol. 29, No.1, 2003, pp. 71-82. [ Links ]
[12] J.O. Kunz, J.R. Whitaker and M.D. Wadanoli. Dietary energetics of the insectivorous Mexican free-tailed bat (Tadarida brasiliensis). 28 october, 1994. [ Links ]
[13] http://biomicro.sdstate.edu/pederses/Caribpics/Tbras.jpg. [ Links ]
[14] B. Hayward and R. Davis. Flight speeds in western bats. Journal of Mammalogy No. 45, 1964, pp. 236-242. [ Links ]
[15] P.l. Svoboda and J.R. Choate. Natural history of the Brazilian free-tailed bat in the San Luis Valley of Colorado. Journal of Mammalogy No. 68, 1987, pp. 224-234. [ Links ]
[16] http://www.scielo.cl. [ Links ]
[17] http://www.batcalls.org. [ Links ]
[18] M. Brock Fenton. www.batcon.org/seedark.html#one. [ Links ]
BIBLIOGRAFÍA
R.F. Coughlin y F.F. Driscoll. Amplificadores operacionales y circuitos integrados lineales (4ª ed.). México, D. F.: Prentice-Hall, 1999. [ Links ]
Millman & Grabel. Microelectronics. (2ª ed.). McGraw Hill, 1987. [ Links ]
J. Proakis. Digital Communications (4ª ed.). Boston: McGraw-Hill, 2001. [ Links ]
Savant-Roden-Carpenter. Diseño electrónico (2ª ed.). Addison wesley, Iberoamérica, 1992 [ Links ]
C. Schuler and M. Chugani. Digital signal processing: a hands-on approach. Boston: McGraw-Hill, 2005. [ Links ]
W. Tomasi. Sistemas de comunicaciones electrónicas (3ª ed.). México, D.F.: Prentice Hall. 1996. http://www.murata.com/catalog/p15e6.pdf. http://www.sibalco.com/de/pdfs/obo/OboPro2_ builtindrive_Buzzer.pdf [ Links ]
Ultrasonic instruments:

