










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkRevista Med
versão impressa ISSN 0121-5256versão On-line ISSN 1909-7700
rev.fac.med v.17 n.1 Bogotá jan./jun. 2009
ARTÍCULO DE REVISIÓN
ANÁLISIS DE VÍDEO PARA ESTIMACIÓN DEL MOVIMIENTO HUMANO: UNA REVISIÓN
VIDEO ANALYSIS FOR ESTIMATION OF THE HUMAN MOVEMENT: A REVISION
ANÁLISE DO VÍDEO PARA O ESTIMATION DO MOVIMENTO HUMANO: UMA REVISÃO
FABIO MARTÍNEZ, INGENIERO MECATRONICOa, FRANCISCO GÓMEZ, INGENIERO DE SISTEMASb Y EDUARDO ROMERO, M.D., PH.D. EN CIENCIAS BIOMÉDICASc*
a Estudiante Maestría en Ingeniería Biomédica.
b Candidato a Doctor en Ciencias de la Computación.
c Director Grupo de Investigación Bioingenium, Centro de Telemedicina, Universidad Nacional de Colombia, Bogotá, D.C.
* Correspondencia: edromero@unal.edu.co. Dirección postal: Carrera 30 45-03 Edificio 471 Facultad de Medicina, Centro de Telemedicina, Universidad Nacional. Ciudad Universitaria, Bogotá, D.C., Colombia.
Recibido: Diciembre 15 de 2008 . Aceptado: Abril 15 de 2009.
Resumen
El análisis cinemático de la marcha es una herramienta fundamental en medicina de rehabilitación, pues facilita el diagnóstico, tratamiento, seguimiento e implementación de métodos de rehabilitación en patologías asociadas con el movimiento. Este análisis se basa en la descripción y en la cuantificación de la variación en los desplazamientos del centro de masa del cuerpo y los centros de giro de las articulaciones, información que permite obtener las diferentes relaciones que se presentan al experto en forma de reporte clínico, o como una herramienta de visualización virtual, con el fin de realizar un análisis observacional de la marcha. En este artículo se revisan los fundamentos y la secuencia de eventos que constituyen un análisis cinemático de la marcha en medicina, proceso que registra, procesa y cuantifica el movimiento del paciente en el contexto clínico.
Palabras clave: marcha, biomecánica, ingeniería clínica
Abstract
The cinematic analysis of the human march is a fundamental tool in rehabilitation medicine, because it facilitates the diagnosis, treatment, follow up and implementation of rehabilitation methods in pathologies associated with the movement. This analysis is based on the description and the quantification of the variability in the displacement of the center mass of the body and the centers of rotation of the joints, information that allows to obtain the various relations that appear to the expert in form of clinical report, or as a tool of virtual visualization, with the purpose of making an observational analysis of the march. In this article the foundations and the sequence of events that constitute a cinematic analysis of the march in medicine are reviewed, as a process that registers processes and quantifies the movement of the patient in a clinical context.
Key words: gait, biomechanics, biomedical engineering
Resumo
O análise cinemático da marcha é uma ferramenta fundamental da medicina, porque facilita o diagnóstico, tratamento, seguimento e implementação de métodos da reabilitação em patologias associados com o movimento. Este análise se baseia na descrição e na quantificação da variação nos deslocamentos do centro da massa do corpo e dos centros da rotação das articulações; informação que permite obter as relações diferentes que se apresentam ao perito no formulário do relatório clínico, ou como uma ferramenta de visualização virtual, com o alvo de fazer uma análise observacional da marcha. Neste artigo se revisam os fundamentos e a seqüência de eventos que constituem uma análise cinemático da marcha na medicina, o processo que registra, processa e quantifica o movimento do paciente no contexto clínico.
Palavras-chave: marcha, biomecânica, engenharia biomédica
Introducción
El patrón de marcha de un paciente se puede ver alterado en patologías como diabetes, parálisis cerebral, accidentes cerebro-vasculares y distrofias neuromusculares, entre otras, debido a que se afectan directamente las funciones motrices y por las secuelas de algún accidente. El estudio del movimiento del cuerpo humano, o 'análisis visual de la marcha', es una herramienta moderna en la evaluación objetiva de estas patologías. Se basa en el seguimiento de algunas variables dinámicas que permiten de manera simultánea cuantificar el grado de la enfermedad, determinar el origen de la patología, comparar la marcha con patrones normales, o realizar eficientemente una alineación dinámica de prótesis de miembro inferior (1-3).
La dinámica del sistema músculo-esquelético, obtenida en el análisis de marcha se evalúa desde las perspectivas cinética y cinemática. Mientras que en el análisis cinemático se describe el desplazamiento del paciente en términos de los componentes del sistema y sus relaciones fundamentales, analizando por ejemplo la variación angular de cada una de las articulaciones que intervienen en la marcha, la longitud del paso y la velocidad de cada uno de los segmentos de los miembros inferiores, en el análisis cinético se cuantifica la energía necesaria para la producción del movimiento, midiendo el estado electrofisiológico del sistema durante el desplazamiento (4), el monitoreo del gasto cardio-respiratorio (5), las fuerzas de reacción del pie sobre el piso, así como las fuerzas, torques y potencias en cada una de las articulaciones que intervienen durante el movimiento1. Una vez se obtenida la información cinética se elabora, junto con la información cinemática, un reporte clínico que reúne elementos objetivos de los patrones de la marcha. Además, la representación virtual de la marcha complementa la información cuantitativa con análisis cualitativos, que permiten realizar una estimación muy precisa de la patología.
La estimación del movimiento humano desde una perspectiva cinemática es adecuada para la mayor parte de las aplicaciones clínicas. Es un análisis cuantitativo que produce una representación virtual de la marcha, lo que permite al experto determinar patologías no detectables con técnicas convencionales, como es la videogametría (6). Este análisis estima las posturas durante la marcha, calculando la ubicación espacial de los centros de masa en cada una de las articulaciones que intervienen en el movimiento, información que es evidencia objetiva para el experto en sus tareas clínicas. Para su desarrollo se han usando diferentes estrategias, como por ejemplo huellas podográficas, electrogoniometría (7), seguimiento por instrumentos magnéticos (8) y procesamiento de vídeo (6, 9). Por su facilidad de implementación y mayor precisión, este último es el método más usado enla actualidad (10). En medicina de rehabilitación, con el fin de obtener información clínica y un modelo observacional con un alto grado de veracidad, es de gran importancia la estimación precisa de las posturas con respecto al centro de masa real y los centros de giro de las articulaciones durante la marcha (11-13).
En este artículo se presenta el estado del arte en el proceso de análisis cinemático de la marcha, usando técnicas de procesamiento de vídeo.
Análisis cinemático de la marcha
El proceso de análisis cinemático estima las relaciones funcionales de la estructura corporal durante el movimiento. Este proceso se utiliza como complemento cuantitativo del diagnóstico o del seguimiento de diferentes patologías asociadas con la marcha (14). Una estimación correcta de la cinemática de la marcha se obtiene calculando la posición espacial del centro de masa del cuerpo y los centros de giro de cada una de las articulaciones que intervienen durante el movimiento. Este análisis comprende varias fases, como se ilustra en la figura 1 y se describe a continuación:
- Captura de vídeos de la marcha y extracción de la estructura del cuerpo. Inicialmente se prepara al paciente utilizando marcadores en puntos anatómicos de interés, definidos de acuerdo con diferentes protocolos (newington, Gage, Davis, Helen Hayes, VCM (Vicon Clinical Manager), Kadaba) (4). La ubicación correcta de esos marcadores requiere la determinación previa de algunos puntos de reparo anatómico, como por ejemplo las prominencias y los centros de giro de las articulaciones. A partir de la localización de los marcadores se estiman medidas antropométricas que son utilizadas posteriormente para generar los patrones de marcha en 3D y el reporte clínico, cuyas variables deben ser normalizadas con estas medidas. Por último, el patrón de marcha se reconstruye usando vídeos capturados desde diferentes ángulos.
- Procesamiento de los vídeos. Se extraen los marcadores de la secuencia de cuadros que componen un vídeo del paciente, con lo cual se obtiene una representación inicial de la estructura corporal en cada uno de los vídeos. En los sistemas actuales existe una etapa inicial de estimación manual de la posición de los marcadores, como punto de referencia para la identificación de la trayectoria de la estructura durante el vídeo. La extracción de la estructura se hace desde uno o varios ángulos de observación, obteniendo un modelo bi o tri-dimensional. Durante la marcha se pueden perder de vista algunos marcadores en el vídeo, un fenómeno que se conoce como oclusión. La solución más sencilla para resolver estos inconvenientes consiste en realizar la captura de vídeos desde cámaras ubicadas en diferentes posiciones.
- Ajuste de la posición de los marcadores. Consiste en estimar la posición correcta de los marcadores ya que esta puede verse alterada durante la marcha, lo cual produce errores en el cálculo de las diferentes variables cinemáticas.
- Modelo de seguimiento. Se hace una corrección de las posturas del paciente durante el movimiento, estimando las posiciones espaciales de los centros de giro de las articulaciones y su cambio en el tiempo. A partir del conjunto de estructuras extraídas del vídeo del paciente se construye el modelo de seguimiento que permite estimar las diferentes relaciones de los centros de masa de las articulaciones, lo que hace de esta fase una de las más críticas en el análisis cinemático de la marcha. Con esta información se construye el conjunto de medidas que componen el reporte clínico. El modelo de seguimiento tiene acoplado un modelo dinámico para corrección y estimación de posturas durante el movimiento.
- Representación de la información. En la fase final, la información cuantitativa de la marcha es reconstruida a partir de la posición de los centros de giro de las articulaciones y su variación en el tiempo2. En esta fase se usan los estados de salida del modelo de seguimiento como una estructura virtual, para presentar al experto una herramienta que le permita mejorar de manera objetiva el análisis observacional.
Existen diferentes sistemas desarrollados para análisis cinemático del movimiento humano. Estos sistemas en general realizan un análisis como el descrito anteriormente, con algunas diferencias en cuanto a la tecnología usada (15). En las siguientes secciones se describirá de manera más detallada cada una de las etapas que componen el análisis cinemático de la marcha.
Análisis funcional de la marcha
Un análisis funcional requiere que las relaciones fundamentales de la estructura del cuerpo humano sean fácilmente observables y se pueda realizar su seguimiento. Es necesario, por tanto, una simplificación de la representación que permita seguir fácilmente las relaciones articulares durante el movimiento. Las estructuras corporales pueden utilizar alguna de las siguientes primitivas (16):
- Puntos. los segmentos corporales de interés son representados por un conjunto de puntos, los cuales proporcionan información aproximada sobre el centro de cada segmento o la ubicación espacial de los centros de giro de las articulaciones (ver figura 2a) (17-18).
- Formas geométricas primitivas. los segmentos corporales se asumen rígidos y son representados por diferentes formas geométricas simples como rectángulos ó elipses (figura 2b) (19- 21).
- Siluetas y contornos de objetos: en estos métodos de representación los límites del cuerpo definen su silueta. Estas estructuras describen generalmente objetos no rígidos (figura 2c) (22-23).
- Modelos de formas articuladas. en este tipo de estructura se define cada segmento corporal (torso, piernas, manos, cabeza y pies) como parte de la estructura. Los modelos de puntos pueden utilizarse para construir modelos articulados (figura 2d) (24-25).
- Modelos esquemáticos. para este tipo de estructura se extrae el eje medio de cada segmento corporal de interés y se representa como una línea. Este modelo es usado para representar formas y reconocer objetos rígidos articulados (figura 2e) (26-28).
A pesar de que existen diferentes tipos de representación, como se mencionó anteriormente, el análisis de la marcha se realiza comúnmente usando una representación corporal de puntos y líneas, cuya simplicidad permite fácilmente observar las relaciones articulares. Esta representación se construye a partir de siete líneas que simulan los miembros inferiores y seis puntos que determinan los centros de giro de las articulaciones, como se muestra en la figura 3. El proceso de captura de la estructura del cuerpo, a partir de la estimación de un conjunto de marcadores, permite simplificar el modelo del cuerpo humano sin perder precisión (10). Por otra parte, se pueden construir estructuras complejas del cuerpo humano a partir de un número elevado de marcadores. Con este tipo de estructuras se disminuye el error generado por el movimiento de los músculos y se obtiene información objetiva sobre la postura del cuerpo humano (29).
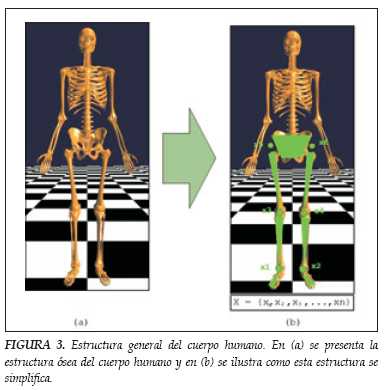
Dado que una representación simple a partir de puntos y líneas de la estructura del cuerpo humano presenta información precisa para un análisis clínico de la marcha a continuación se describirán las diferentes etapas que se requieren para su construcción.
Calibración de las cámaras
El primer paso en el proceso de construcción de una representación simplificada del cuerpo humano es el registro y ajuste de los parámetros intrínsecos y extrínsecos del sistema de captura. Intrínsecos se refiere a la calibración de las cámaras de vídeo, la determinación de la distancia focal, el centro óptico o la escala del mundo real. Los parámetros extrínsecos están relacionados con la ubicación espacial del conjunto de cámaras y las condiciones de iluminación que permiten optimizar el proceso de captura. Estos parámetros son determinantes en el resultado del proceso de segmentación de los marcadores anatómicos, en el proceso de correspondencia de las diferentes perspectivas y en la reconstrucción tridimensional de la estructura. En este tipo de aplicaciones, la geometría observada desde una cámara junto con sus parámetros, son descritos bajo la hipótesis del modelo de Pin Hole (30), que asume que todo punto en una imagen es consecuencia del impacto de un rayo de luz sobre un objeto en la escena y llega a la cámara atravesando un solo punto (centro óptico), es decir que no hay fenómenos de interferencia ni de difracción.
El método más comúnmente utilizado para calibrar cámaras, estima inicialmente una matriz de proyección M partiendo de un escenario en el cual se sitúan puntos en 3D  cuyas coordenadas se conocen previamente. Una vez la configuración ha sido definida, se capturan imágenes desde las diferentes cámaras con el conocimiento previo de la ubicación del objeto
cuyas coordenadas se conocen previamente. Una vez la configuración ha sido definida, se capturan imágenes desde las diferentes cámaras con el conocimiento previo de la ubicación del objeto  Con los datos capturados se define una ecuación lineal que permite obtener la transformación dada por la matriz de proyección q = Mp (31). Algunos métodos permiten obtener los parámetros de la cámara sin conocimiento de las condiciones extrínsecas de la ubicación de la cámara. Por otra parte otros métodos de calibración (31) no requieren conocimiento en detalle de la geometría tridimensional. Estos enfoques necesitan únicamente de dos proyecciones independientes y un modelo de probabilidad que complete la información que falta. Varias técnicas de estimación de una función de distribución de probabilidad pueden ser usadas. El criterio del máximo a posteriori se alcanza con una buena estimación de la función de verosimilitud y en este caso, las condiciones controladas de los laboratorios de marcha y el conocimiento a priori permiten una buena aproximación. Algunos métodos de auto-calibración de cámaras móviles no requieren escenarios controlados para la obtención de los parámetros extrínsecos, es suficiente con la captura de cinco imágenes de cada cámara (N cámaras) para obtener un sistema de referencia (32). Sin embargo, el proceso de inicialización de este método es tedioso, puesto que una sincronización precisa requiere, en general, un conjunto muy grande de capturas.
Con los datos capturados se define una ecuación lineal que permite obtener la transformación dada por la matriz de proyección q = Mp (31). Algunos métodos permiten obtener los parámetros de la cámara sin conocimiento de las condiciones extrínsecas de la ubicación de la cámara. Por otra parte otros métodos de calibración (31) no requieren conocimiento en detalle de la geometría tridimensional. Estos enfoques necesitan únicamente de dos proyecciones independientes y un modelo de probabilidad que complete la información que falta. Varias técnicas de estimación de una función de distribución de probabilidad pueden ser usadas. El criterio del máximo a posteriori se alcanza con una buena estimación de la función de verosimilitud y en este caso, las condiciones controladas de los laboratorios de marcha y el conocimiento a priori permiten una buena aproximación. Algunos métodos de auto-calibración de cámaras móviles no requieren escenarios controlados para la obtención de los parámetros extrínsecos, es suficiente con la captura de cinco imágenes de cada cámara (N cámaras) para obtener un sistema de referencia (32). Sin embargo, el proceso de inicialización de este método es tedioso, puesto que una sincronización precisa requiere, en general, un conjunto muy grande de capturas.
Segmentación de marcadores
Es el proceso mediante el cual se extrae la posición espacial de los marcadores (ubicados en el paciente). Se han descrito diferentes métodos en la literatura, pero de manera general todos siguen tres fases, tal y como se describe a continuación (figura 4):
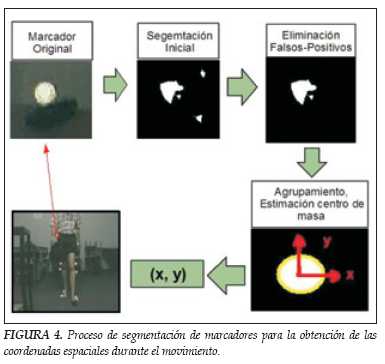
- Segmentación inicial de los marcadores. Se obtienen regiones primarias de la ubicación de los marcadores y dependiendo de las condiciones definidas en la adquisición, en esta fase también se detecta ruido asociado, que incrementa la tasa de falsos positivos.
- Eliminación de falsos positivos. Luego de una segmentación inicial es fundamental definir estrategias eficientes para eliminar regiones que no representan marcadores.
- Agrupamiento de las regiones. El proceso de segmentación se hace a nivel de pixeles y en función del nivel de ruido presente en la adquisición. Los marcadores pueden aparecer como un conjunto de múltiples regiones disyuntas, lo que hace necesario definir una metodología para agrupar estas regiones.
- Cálculo de centro de masa de los marcadores. Finalmente para cada una de las regiones segmentadas que representan marcadores en la imagen se calcula su centro.
Implementaciones para segmentación de marcadores. El problema de la segmentación está presente en muchísimas aplicaciones de visión artificial y existe una gran experiencia en la segmentación de objetos usando operaciones elementales sobre la forma de los objetos. De manera genérica, esta área se conoce como morfología matemática y se ha utilizado con éxito en la segmentación de marcadores (33). El proceso de segmentación comienza con el uso de operadores globales sobre las regiones de interés (tales como la erosión y dilatación), seguidos de un gradiente morfológico que permite determinar los contornos de las regiones y su correspondiente centro de masa. Finalmente, se corrige la posición de los marcadores usando los cuadros anteriores. Métodos más elaborados para la segmentación de marcadores involucran información sobre la dinámica. Inicialmente se aplica un umbral de intensidad sobre un conjunto pre-definido de imágenes, luego se eliminan algunas regiones utilizando como criterio el tamaño y forma de los marcadores y por último, bajo la hipótesis de que el movimiento de los marcadores en cuadros consecutivos es lineal, se utiliza un filtro de Kalman para hacer el seguimiento de los marcadores y una segmentación más eficiente y precisa (34).
Correspondencia desde diferentes perspectivas y reconstrucción 3d
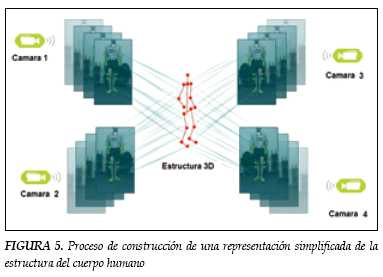
A partir de la información en vídeo de la marcha del paciente desde diferentes perspectivas se puede obtener una representación tridimensional de la estructura del cuerpo humano, como se ilustra en la figura 5. Usando la información de las diferentes perspectivas y los parámetros de cámara, se puede obtener por técnicas de geometría proyectiva una reconstrucción 3D. Cada perspectiva proporciona líneas paralelas que apuntan a los marcadores. Métodos de triangulación convencionales permiten obtener información sobre la profundidad de cada marcador (35-37). Además, en el proceso de reconstrucción 3D se utilizan algoritmos de rectificación, con el fin de obtener de forma más precisa los valores de profundidad calculados (38-39). Este enfoque es ampliamente usado debido a su simplicidad y buenos resultados, con la ventaja adicional de que soluciona el problema de oclusión3 de los marcadores durante el movimiento.
Existen otras formas para realizar la reconstrucción 3D de la estructura del cuerpo humano, como la que propone un algoritmo que hace corresponder un conjunto de siluetas del paciente capturadas durante el examen con siluetas provenientes de una base de datos de figuras humanas en 3D (40). También es posible la reconstrucción 3D de la estructura usando únicamente una cámara de vídeo mediante una función de verosimilitud, construida a partir del conocimiento a priori del movimiento humano y un conjunto de datos de entrenamiento. El conocimiento a priori usado en este modelo permite solucionar problemas de oclusión (41). Otro método para reconstruir tridimensionalmente la estructura del cuerpo humano, a partir de la estimación del máximo a posteriori de la trayectoria del movimiento, se basa en medidas tomadas del paciente, estando sujeto a restricciones como el límite de la variación angular en las articulaciones (42).
Ajuste de marcadores
Esta etapa es útil para complementar el modelo de seguimiento porque permite ajustar los cambios que se pudieran presentar en un experimento particular, debidos a las diferencias anatómicas entre pacientes. Existen diferentes métodos y procedimientos que permiten ajustar la posición de los marcadores durante el desplazamiento del paciente, como se describe a continuación.
Ajuste de posición de los marcadores. Consiste en realizar la corrección de la trayectoria de los marcadores, ajustando las trayectorias individuales de cada uno de estos (43-45).
Ajuste de los protocolos de ubicación de marcadores. Este procedimiento hace variantes a los protocolos para minimizar el error en la estimación de las trayectorias de cada uno de los marcadores:
- Definir protocolos con un número mayor de marcadores.
- Posicionamiento de los marcadores en sitios más alejados de los centros articulares.
- Uso de sistemas como resonancia magnética, fluoroscopia o radiografía para determinar explícitamente la posición del marcador con respecto al hueso.
Modelos cinemáticos de la marcha
Un modelo es una abstracción de la realidad y de la cual se infieren las relaciones fundamentales de un sistema de la manera más simple posible. Las relaciones esenciales de la dinámica de la marcha humana se describen mediante un modelo, que típicamente utiliza diferentes relaciones antropométricas de la estructura del cuerpo humano y variables dinámicas de estas estructuras que cambian en el curso de la adquisición (46). Estas relaciones fundamentales son muy difíciles de encontrar en el caso de la marcha, porque el sistema es producto de una sincronización compleja de fuerzas no lineales ejercidas por los músculos, movimiento de múltiples articulaciones y comandos neuromotores (47). Es decir que la marcha define esencialmente una relación de no linealidad, multidimensionalidad e interdependencia entre los componentes del sistema.
Los modelos dinámicos simulan el movimiento humano descrito a través de diferentes trayectorias de variables cinéticas y cinemáticas. Una de las variables de mayor relevancia en los modelos de movimiento humano es la trayectoria del centro de gravedad porqué permite obtener información global sobre la estabilidad de la estructura, sirve como un descriptor patológico y permite evaluar la eficiencia y simetría durante la marcha.
En la literatura se han reportado dos tendencias sobre el movimiento humano, ambas basadas en el principio de minimización de la energía al evaluar la trayectoria del centro de gravedad. Estas dos teorías resultan ser contradictorias en su hipótesis (47-49), como se discute a continuación:
Las seis determinantes de la marcha. En esta teoría se plantea como hipótesis que el desplazamiento vertical del centro de masa permanece constante durante el movimiento y de esta manera se minimiza el gasto de energía. La hipótesis se basa en el grupo de relaciones cinemáticas4 que reducen el desplazamiento vertical del centro de masa, asumiendo que este movimiento tiene un costo energético elevado. Es un modelo que ha caído en desuso debido a que en los últimos años han surgido múltiples evidencias experimentales que demuestran que tres determinantes de la marcha no minimizan el desplazamiento vertical (47). Otros experimentos han demostrado que el gasto energético es mayor al reducir el desplazamiento vertical del centro de gravedad, cuando se compara con la marcha normal.
Analogía con el péndulo invertido. En este modelo el comportamiento de un péndulo es similar al de las piernas del paciente durante el movimiento, con lo que el centro de gravedad se mueve siguiendo una trayectoria en arco, describiendo un movimiento armónico, trayectoria que consigue una minimización de la energía descrita en los términos discutidos anteriormente. Actualmente es el modelo más apropiado para la descripción de la marcha, a pesar de que no existe una aproximación de las fuerzas que se requieren para ejecutar el movimiento.
Dinámica pasiva de la marcha. Con base en la teoría del péndulo invertido y asumiendo que los parámetros mecánicos del cuerpo humano5 tienen un gran efecto en la marcha, McGeer (50) propuso este modelo, a partir del cual se pudieron fabricar robots bípedos que no requerían de herramientas de control para su desplazamiento. Garcia et al (51) propusieron un modelo que describe un movimiento estable a partir de una simplificación de la dinámica pasiva de la marcha, representando la estructura con una masa grande (el tronco) y dos masas muy pequeñas (los pies). El movimiento está gobernado por las ecuaciones del péndulo doble articulado y una regla de restricción llamada el "choque de talón", que permite el intercambio del punto de apoyo en el balanceo de las piernas. Por otra parte, Kuo (52) modificó el modelo simplificado de García, agregando a la regla de restricción una variable que describe el momento que se produce en la cadera con el "choque de talón" y un impulso que simula el despegue de los dedos. Estas modificaciones permitieron suavizar las colisiones producidas por el golpe de talón, obteniendo un gasto de energía mínimo para el desplazamiento del centro de gravedad.
Enfoque de la cinemática inversa. Es un enfoque comúnmente conocido para describir el cambio de posición de un sistema dinámico a través del tiempo y que puede usarse como modelo dinámico en el análisis de movimiento humano. La cinemática inversa se define como la trayectoria que adopta un sistema dadas las condiciones iníciales, finales y su estructura. Se ha usado para determinar las posturas del cuerpo humano en un marco de restricciones (53) y presenta el problema de que para un estado particular pueden existir múltiples resultados, lo que lo convierte en un sistema mal condicionado o con múltiples soluciones. Por ello ha sido combinado con herramientas estadísticas que determinen los diferentes estados del sistema (54). Algunas restricciones, (basadas en la biomecánica del cuerpo) se han incorporado (55), modelando los músculos como elementos pasivos que consumen energía y los tendones como elementos encargados de liberar energía, teniendo en cuenta que las articulaciones varían su rigidez de movimiento para diferentes tareas.
Modelo de seguimiento
Mediante la evaluación de la posición y orientación de cada segmento corporal en el tiempo, el seguimiento permite estimar las trayectorias de las diferentes articulaciones durante el movimiento del paciente, predecir el movimiento y compensar el error en la estimación de la localización espacial de los centros de masa de las articulaciones. Con el fin de mantener la consistencia en el análisis, los modelos de seguimiento imponen restricciones al movimiento y a la apariencia del objeto, pudiendo considerarse un problema complejo debido a pérdida de información por la proyección de un mundo 3D en 2D, a imágenes ruidosas, al movimiento complejo del objeto, a objetos de naturaleza articulada no rígida, a oclusión de los objetos, a que la estructura del cuerpo humano puede ser una forma compleja de acuerdo con la estructura seleccionada y al costo computacional elevado (16).
Los primeros modelos de seguimiento desarrollados fueron determinísticos y en ellos se definía la relación existente entre los puntos que representaban la estructura del cuerpo humano, a través de restricciones sobre este conjunto de puntos, como:
- Proximidad: la localización de un punto de interés debe tener cambios espaciales mínimos.
- Máxima velocidad: define una velocidad máxima de cambio de un cuadro a otro en el vídeo analizado.
- Aceleración nula: la dirección y la velocidad del objeto es constante, con lo cual la aceleración es cero.
- Movimiento común: que restringe la velocidad del objeto en pequeñas vecindades.
- Rigidez: dado que la estructura del cuerpo humano está conformada por un conjunto de puntos, se asume que la distancia entre dos puntos de un mismo cuadro no cambia.
- Uniformidad proximal: definida como la combinación de restricciones de proximidad y máxima velocidad.
Actualmente estos modelos se usan como complemento de modelos más complejos, que describen de manera más precisa las relaciones fundamentales del aparato locomotor. Sin embargo, muchas de las restricciones descritas anteriormente son introducidas como hipótesis. Aunque estos modelos, describen de forma general el movimiento corporal (56), no capturan la alta complejidad de la marcha, por lo cual resultan insuficientes para realizar análisis clínicos en donde la frontera entre lo normal y lo patológico es muy difusa. Últimamente, el desarrollo de modelos estocásticos que utilizan un enfoque Bayesiano, con restricciones determinísticas que permiten obtener representaciones apropiadas de la cinemática de la marcha, ha permitido representaciones mucho más precisas de este fenómeno. Por lo general describen posición, velocidad y aceleración de la estructura del cuerpo humano como variables aleatorias. La información que representa la estructura del cuerpo humano durante la marcha es una secuencia de estados Xk: k=1,2,...,n y el cambio de estados está gobernado por una ecuación dinámica:

Con Xt el estado actual, Xt(Xt-a) una función estocástica de estados anteriores y Wt algún tipo de ruido aditivo. La relación entre las observaciones de las variables cinemáticas de la marcha y el estado del sistema se especifica por la relación:
en donde Zt corresponde a una observación del movimiento en el tiempo t , ht es alguna función estocástica que depende del estado Xt y de algún tipo de ruido γt 6.
La estrategia de seguimiento Xt consiste en la estimación de verosimilitud de la posición de la estructura dada las observaciones del proceso presentes hasta el momento. Diferentes implementaciones del filtro Bayesiano para el seguimiento de la marcha humana se han reportado en la literatura: filtros de Kalman (57-58) filtros de partículas (59-60), representaciones topológicas (61) y reglas basadas en múltiples hipótesis (62). Existen modelos Bayesianos más elaborados para aprendizaje de posturas y movimientos, entre ellos los que usan técnicas estadísticas modernas, como los Modelos Gaussianos para procesos dinámicos (GPDM (63), por medio de los cuales y con pocas variaciones en la entrada, se puede obtener un aprendizaje efectivo de diferentes estilos de movimiento.
Representación de los resultados
La dinámica del sistema musculo-esquelético del paciente obtenida en las fases anteriores, es presentada al experto por medio de herramientas de visualización para un análisis observacional, ó como reporte clínico para un análisis cuantitativo de las variables cinemáticas. La presentación de esta información permite al experto clínico evaluar los patrones de la marcha del paciente para determinar y hacer seguimiento de diferentes patologías asociadas con el movimiento.
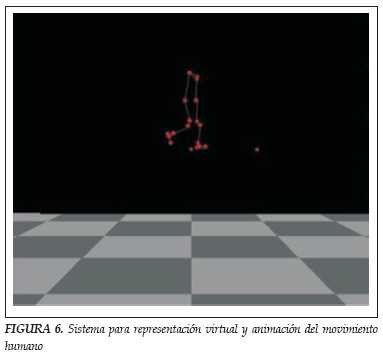
Sistemas de visualización. El análisis cinemático de la marcha, combinado con técnicas de procesamiento de vídeo y de computación gráfica, permite la visualización, la manipulación y la interacción de representaciones virtuales de la estructura del cuerpo humano durante la marcha. En la figura 6 se ilustra un sistema de visualización para el análisis observacional de la marcha, en el cual el modelo de seguimiento es representado por un objeto virtual. La estructura del cuerpo humano puede ser representada usando sujetos virtuales, con lo cual la animación es más real, permitiendo un análisis observacional del movimiento de las estructuras anatómicas del cuerpo (6, 21, 64-65). Nuevas técnicas en el área de realidad virtual, como la realidad aumentada, permiten mezclar la estructura virtual del cuerpo humano con la escena de donde fue registrado el movimiento.
Reporte clínico. Contiene información cuantitativa de las diferentes variables dinámicas que describen la marcha. Entre las más relevantes para un análisis clínico se cuenta con (2):
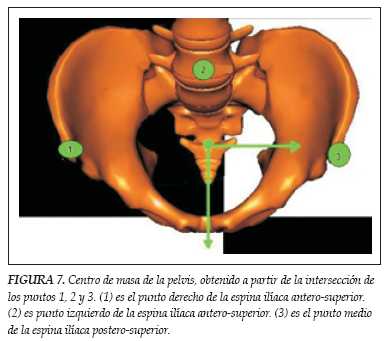
- El Centro de Masa: el centro de masa calculado usando los tres puntos imaginarios ilustrados en la figura 7, constituye un importante descriptor de la cinemática de la marcha, que por si solo refleja desordenes en el sistema nervioso y musculo-esquelético.
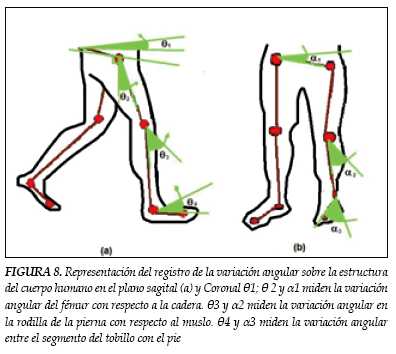
- Variación angular: Estas variables cinemáticas estiman el cambio de posición de los segmentos corporales como pelvis, cadera, rodilla y tobillo a partir de la posición angular de las articulaciones, tal y como se ilustra en la figura 8.
- Velocidad en la marcha: Se calcula como la relación entre los cuadros por segundo capturados en el vídeo y el cambio de la postura de la estructura del cuerpo.
- Longitud del paso: Es la distancia medida entre dos puntos sucesivos de contacto de pies opuestos.
- de apoyo de un talón de una pierna hasta el siguiente apoyo del talón de la misma pierna. Esta variable dinámica determina el ciclo de marcha del paciente.
Conclusiones
En los últimos años, la medicina basada en la evidencia ha generado la necesidad de cuantificar cualquier patología, de manera que se pueda medir objetivamente el impacto de cualquier tratamiento y realizar de manera más eficiente el seguimiento. En particular, el impacto del análisis de muchas patologías del sistema musculo esquelético ha mejorado de forma notable con el uso de herramientas complejas como los laboratorios de análisis de la marcha.
El análisis cinemático de la marcha, que consiste en una secuencia de eventos agrupados en diferentes fases, es una herramienta fundamental de apoyo para el diagnóstico de diversas patologías asociadas con el movimiento. Las características particulares de cada fase la pueden hacer más, o menos adecuada para el análisis de diferentes patologías asociadas con la marcha, siendo de vital importancia la fase de seguimiento, porque estima la posición correcta del centro de gravedad y del centro de giro de las articulaciones, obteniendo las variables dinámicas con un mayor grado de precisión. Existen diferentes estrategias para esta fase, que van desde la modificación de los protocolos de los marcadores, hasta el ajuste de las trayectorias con modelos físicos que describen la biomecánica de los miembros inferiores.
El procesamiento de vídeo en pacientes con alteraciones de la marcha provee mecanismos precisos para la evaluación de la marcha por ser mínimamente invasivo y por cuantificar múltiples variables dinámicas, cualidades imposibles de alcanzar con otras técnicas que también permiten un análisis minucioso. A pesar de los avances logrados en los últimos años respecto al análisis de marcha, aún existen problemas, debidos a la variabilidad y reproducción en las medidas obtenidas. Investigaciones en áreas de visión por computador, desarrollan actualmente estrategias de segmentación y seguimiento de la estructura del cuerpo humano, que permitan el análisis de la marcha sin el uso de marcadores, preservando las medidas antropométricas para la cuantificación de las variables dinámicas de los patrones del movimiento.
1 Para el registro de estas variables es necesaria la información de las variables cinemáticas.Volver
2 Esta información constituye el reporte clínico.Volver
3 El movimiento de los miembros superiores e inferiores oculta por instantes los marcadores del plano de captura de la cámara.Volver
4 Determinantes de la marcha.Volver
5 Localización y distribución de masas.Volver
6 En general este tipo de ruido se define como Gaussiano porque la independencia en las observaciones es una hipótesis frecuente.Volver
Referencias
1. Sweeting K, Mock M. Gait and Posture. Assessment in general practice. Australian Family Physician. 2007; 36: 398-405. [ Links ]
2. Gage JR. Gait analysis in cerebral palsy. Clin Dev Med. 1991; 121: 3-4. [ Links ]
3. Wagenaar R.C, Beek W.J. Hemiplegic gait: A kinematic analysis using walking speed as a basis. Journal of Biomechanics, Volume 25, Issue 9, September 1992, Pages 1007-1015. [ Links ]
4. Baker R. Gait analysis methods in rehabilitation. Journal of NeuroEngineering and Rehabilitation2006, 3:4. [ Links ]
5. Datta D, et al. A comparative evaluation of oxygen consumption and gait pattern in amputees using Intelligent Prostheses and conventionally damped knee swing-phase control. Clinical Rehabilitation, Vol. 19, No. 4, 398-403 (2005). [ Links ]
6. Simon S. Quantification of human motion: gait analysisbenefits and limitations to its application to clinical problems. Journal of Biomechanics 37 (2004) 1869–1880. [ Links ]
7. Van Sint Jan S, et al. Registration of 6-DOFs electrogoniometry and CT medical imaging for 3D joint modeling. Journal of Biomechanics 35 (2002) 1475–1484. [ Links ]
8. Choi K, et al. Processing Motion Capture Data to Achieve Positional Accuracy. Graphical Models and Image Processing 61, 260–273 (1999). [ Links ]
9. Geroch M. Motion capture for the rest of us. Journal of Computing Sciences in Colleges. Volume 19, Issue 3 (January 2004). [ Links ]
10. Silaghi M, et al. Local and Global Skeleton Fitting Techniques for Optical Motion Capture. IFIP CapTech'98, Geneva Nov. 26-28th 1998. LNCS Springer Verlag Heidelberg. [ Links ]
11. Moeslund T.B, et al. A survey of advances in vision-based human motion capture and analysis. Computer Vision and Image Understanding. Volume 104 , Issue 2 (November 2006). [ Links ]
12. Aggarwal J.K, Cai Q. Human motion analysis: a review. Proc. of IEEE Workshop on Motion of Non-Rigid and Articulated Objects. 1997, pp. 90-102. [ Links ]
13. Wang L, Hu W, Tan T. Recent Developments in Human Motion Analysis. Pattern Recognition 36 (2003) 585-601. [ Links ]
14. Stephen D. Tracking. Modelling and animation in human motion analysis, diagnosis and synthesis. International conference on Multimedia., pages 33–40, 1998. [ Links ]
15. Zhou H, Hu H. A Survey - Human Movement Tracking and Stroke Rehabilitation. Technical Report CSM-420, ISSN 1744 - 8050,University of Essex, UK, 2004. [ Links ]
16. Yilmaz A, et al. Object tracking: A survey. ACM Computing Surveys (CSUR). Volume 38, Issue 4 (2006). [ Links ]
17. Takahashi K, et al. Remarks on a Real-Time 3D Human Body Posture Estimation Method Using Trinocular Images. 15th International Conference on Pattern Recognition (ICPR'00) - Volume 4. [ Links ]
18. DiFranco D, et al. Reconstruction of 3-D Figure Motion from 2-D Correspondences. Appears in Computer Vision and Pattern Recognition (CVPR 01), Kauai, Hawaii, November, 2001. [ Links ]
19. Date N, et al. Real-time Human Motion Sensing based on Visionbased Inverse Kinematics for Interactive Applications. 17th International Conference on Pattern Recognition (ICPR'04) - Volume 3. [ Links ]
20. Krahnstoever N, Yeasin M, Sharma R. Automatic acquisition and initialization of kinematic models. In: IEEE conference on computer vision and pattern recognition, 2001. [ Links ]
21. Yonemoto S, Taniguchi, R. Human figure control software for real-virtual application. Eighth International Conference on Volume , Issue , 14-16 July 2004 Page(s): 858 – 862. [ Links ]
22. Hilton A, et al. Virtual people: capturing human models to populate virtual worlds. Computer Animation, 1999. [ Links ]
23. Plankers R, Fua P. Articulated Soft Objects for Multi-View Shape and Motion Capture. IEEE PAMI, 25(10), 2003. [ Links ]
24. Sundaresan A, Chellappa R. Markerless Motion Capture using Multiple Cameras. Computer Vision for Interactive and Intelligent Environment, 2005 In Computer Vision for Interactive and Intelligent Environment, 2005 (2005), pp. 15-26. [ Links ]
25. Demirdjian D, Ko T, Darrell T. Constraining Human Body Tracking. Computer Vision, IEEE International Conference on, Vol. 2 (2003). [ Links ]
26. Chu C, et al. Markerless Kinematic Model and Motion Capture from Volume Sequences. To appear in Proceedings of IEEE Computer Vision and Pattern Recognition, Madison, Wisconsin, USA, June 16-22, 2003. [ Links ]
27. Fujiyoshi H, et al. Real-Time Human Motion Analysis by Image Skeletonization. IECE TRANS. INF. & SYST., Vol.E87-D, NO.1 JANUARY 2004. [ Links ]
28. Herda, et al. Skeleton-Based Motion Capture for Robust Reconstruction of Human Motion. Computer Animation 2000. Proceedings. [ Links ]
29. Park S, Hodgins J. Capturing and animating skin deformation in human motion. ACM Transactions on Graphics (TOG) Volume 25, Issue 3 (July 2006) [ Links ]
30. Forsyth A, Ponce J. Computer Vision: A Modern Approach. Prentice Hall. [ Links ]
31. Hartley R, Zisserman A. Multiple View Geometry in Computer Vision. Cambridge University Press. 2003. [ Links ]
32. Triggs B. Autocalibration from planar scenes. Lecture Notes In Computer Science; Vol. 1406. Proceedings of the 5th European Conference on Computer Vision-Volume I - Volume I. 1998. [ Links ]
33. Figueroa P, Leite N, Barros R, Brenzikofer R. tracking markers for human motion analysis. Congrès Signal processing IX : theories and applications: (Rhodes, 8-11 September 1998). [ Links ]
34. Keskin C, Aran O, Akarun L. 2005. Real time gestural interface for generic applications. In: European Signal Processing Conf., EUSIPCO Demonstration Session, Antalya. [ Links ]
35. Rhone-Alpes. Computational models for computer vision. 2005. [ Links ]
36. Henrichsen A. 3D Reconstruction and Camera Calibration from 2D Images. Master of Science in Engineering at the UNIVERSITY OF CAPE TOWN December 2000. [ Links ]
37. Laveau S, Faugeras O. Oriented Projective Geometry for computer Vision. Lecture Notes In Computer Science; Vol. 1064. Proceedings of the 4th European Conference on Computer Vision-Volume I - Volume I. 1996. [ Links ]
38. Pollefeys M, Koch R, Van Gool L. A simple and efficient rectification method for general motion. Computer Vision, 1999. The Proceedings of the Seventh IEEE International Conference on. [ Links ]
39. Fusiello A, Trucco E, Verri A. Rectification with unconstrained stereo geometry. BMVC 1997. [ Links ]
40. Aguiló A, Martinez P, Buades J.M, Perales F.J, González M. Human motion analysis and synthesis using graphical biomechanics models applied to disable swimming people, in the 3rd International Workshop on Virtual Rehabilitation, Lausanne, Switzerland. 16-17 September 2004. [ Links ]
41. Howe N, Leventon M, Freeman W. Bayesian reconstruction of 3d human motion from single-camera video. TR-99-37 October 1999. [ Links ]
42. DiFranco D, et al. Reconstruction of 3-D Figure Motion from 2-D Correspondences. Computer Vision and Pattern Recognition (CVPR 01), Kauai, Hawaii, November, 2001. [ Links ]
43. Charlton, et al. Repeatability of an optimised lower body model. Gait and Posture 20 (2004) 213–221. [ Links ]
44. Benedetti M.G, et al. Data management in gait analysis for clinical applications. Clinical Biomechanics Vol. 13, No. 3. pp. 204-215, 1998. [ Links ]
45. Baker R. Gait analysis methods in rehabilitation. Journal of NeuroEngineering and Rehabilitation 2006, 3:4. [ Links ]
46. Brubaker M, et al. Physics-Based Person Tracking Using Simplified Lower-Body Dynamics. IEEE Conference on Computer Vision an Pattern Recognition, Minneapolis, 2007. [ Links ]
47. Kuo A. The six determinants of gait and the inverted pendulum analogy: A dynamic walking perspective. EWOMS 2007: European Workshop on Movement Science No 3, Amsterdam, PAYS-BAS (31/05/2007) 2007, vol. 26, no 4 (193 p.). [ Links ]
48. Barbier F, et al.Estimation of the 3D center of mass excursion from force plate data during standing. IEEE Transaction on Neural System and on Rehabilitation Engineering 11, 31-37 (2003). [ Links ]
49. Glaros D. Demopoulos D, Rigas C. Computational method for analysis and filtering of the CG motion signals during gait based on the fourier series analysis. itab2006. [ Links ]
50. McGeer T. Passive dynamic walking. International Journal of Robotics Research. Volume 9 , Issue 2 (April 1990). [ Links ]
51. Garcia M, et al. The simplest walking model: Stability, complexity, and scaling. ASME Journal of Biomechanical Engineering. February 10, 1998. [ Links ]
52. Kuo A. Energetics of actively powered locomotion using the simplest walking Model. Journal of Biomechanical Engineering. FEBRUARY 2002, Vol. 124. [ Links ]
53. Grochow K, et al. Style-based inverse kinematics. ACM Trans. on Graphics (Proc. SIGGRAPH'04). [ Links ]
54. Boulic R, et al. A robust approach for the control of the center of mass with inverse kinetics. Comput. & Graphics, Vol. 20, No. 5, pp. 693- 701, 1996. [ Links ]
55. Liu C, et al. Learning physics-based motion style with nonlinear inverse optimization. ACM Transactions on Graphics (TOG). Volume 24, Issue 3 (July 2005). [ Links ]
56. Urtasun R, Fua P. 3D human body tracking using deterministic temporal motion models, in Proceedings of the 8th European Conference on Computer Vision (ECCV '04), vol. 3, pp. 92–106, Prague, Czech Republic, May 2004. [ Links ]
57. Azoz Y, et al. Tracking the human arm using constraint fusion and multiple-cue localization. Machine Vision and Applications. Volume 13, Issue 5-6 (March 2003). [ Links ]
58. Gao J, et al. A multi-kalman filtering approach for vídeo tracking of human-delineated objects in cluttered environments. Computer Vision and Image Understanding, Volume 99, Issue 1, July 2005, Pages 1-57. [ Links ]
59. Nait-Charif, H., McKenna, S.J.: Tracking poorly modelled motion using particle filters with iterated likelihood weighting. In: Asian Conference on Computer Vision, Jeju Island, Korea (2004). [ Links ]
60. Lee M, et al. Particle Filter with Analytical Inference for Human Body Tracking. Proceedings of the Workshop on Motion and Video Computing (MOTION 02). [ Links ]
61. Taycher L, Trevor J. Recovering articulated model topology from observed motion, in: Neural Information Processing Systems, 2002, pp. 1311-1318. [ Links ]
62. Moeslund T. Sequential Monte Carlo tracking of body parameters in a sub-space. AMFG. IEEE International Workshop on Analysis and Modeling of Faces and Gestures. 2003. [ Links ]
63. Urtasun R, et al. 3d people tracking with gaussian process dynamical models. 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition - Volume 1. 2006. [ Links ]
64. Hilal I, Burdin V, Stindel E, Roux C, Lefevre C. Human gait simulation using virtual reality. Engineering in Medicine and Biology Society, 1998. [ Links ]
65. Chen Y, et al. 3D Knee Modeling and Biomechanical Simulation. Computing in Science & Engineering. 1999. [ Links ]

