











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares em
SciELO
Similares em
SciELO  Similares em Google
Similares em Google 
 Permalink
Permalink1. Introducción
La técnica de control que inicialmente se empleó en el control de máquinas eléctricas fue el control escalar con una respuesta transitoria insatisfactoria [1], ante esto con el avance tecnológico se desarrolla el control vectorial que permite tener un control preciso del par electromagnético,este se divide en control de campo orientado FOC [2] y control directo al par DTC [3]. El control vectorial de campo orientado (FOC) y el control directo del par (DTC) son técnicas de control de velocidad aplicadas en los motores síncronos de imanes permanentes [4]. La técnica de control FOC se basa en controlar por separado el flujo del estator y el par electromagnético a partir de la medición de las corrientes que alimenta al PMSM [2], [5]. Mientras que la técnica de DTC se basa en el control del par electromagnético y control del flujo magnético en el estator, directamente y por separado, mediante la selección directa y correcta de los vectores espaciales de voltaje.
En cuanto al control de velocidad las técnicas de control más utilizadas son DTC y FOC, razón por la cual se analiza la efectividad de dichas técnicas al controlar tres variables que son: el par electromagnético, el flujo magnético y la velocidad. El análisis se realiza tomando en cuenta los tiempos de establecimiento, tiempos de sobreimpulso y tiempos pico. Cabe decir que uno de los temas relacionados con el análisis del modelo matemático del motor síncrono de imanes permanentes y el desarrollo matemático de las técnicas de control FOC y DTC es el dominio teórico de la transformada de Clarke y su aplicación [6].
Este artículo está estructurado de la siguiente forma: la sección dos presenta el modelamiento matemático del motor síncrono de imanes permanentes, la sección tres presenta el diseño de control directo del par mientras que la sección cuatro describe el diseño del control vectorial de campo orientado, la sección cinco presenta los resultados de comparación entre las dos técnicas de control descritas en el artículo, finalmente la sección seis presenta las principales conclusiones de este trabajo.
2. Modelo matemático del motor síncrono de imanes permanentes
Un motor síncrono es un tipo de maquina eléctrica rotativa que transforma energía eléctrica en mecánica, necesita de una doble alimentación, con corriente alterna trifásica para la parte del estator y otra de corriente continua para crear un campo magnético en el rotor. Por tener imanes permanentes en el rotor se tiene como beneficio la eliminación de las perdidas en el cobre del rotor, mayor densidad de potencia y menor inercia del rotor. El motor síncrono de imanes permanentes o Permanent Magnet Synchronous Motor (PMSM, por sus siglas en inglés) tiene mayor eficiencia que un motor de inducción, pero puede tener una reducción de la flexibilidad en el control de flujo y un posible efecto de desmagnetización en los imanes [7], [8].
En este estudió se utilizará un PMSM de imanes superficiales con flujo radial y fuerza electromotriz con distribución sinusoidal en el devanado del estator. El modelo vectorial del PMSM en el sistema de referencia síncrono (d; q) se presenta en la ecuación (1) y (2). Se debe tener en cuenta que las componentes de secuencia cero son nulas y se las utiliza para obtener la transformada inversa de Clarke y Park, lo cual permite regresar a las ecuaciones primitivas [9], [10]. El par desarrollado se presenta en la ecuación (3) mientras que la aceleración eléctrica se presenta en la ecuación (4), como sigue:




Donde vd, vq son los voltajes del PMSM en el sistema de referencia síncrono (d,q), wr es la velocidad eléctrica, L d y L q son respectivamente las inductancias en el eje d y q, R s es la resistencia de estator, i d e i q son las corrientes en el eje d y q respectivamente, IP es el flujo de los imanes permanentes, T e es el par electromagnético, p es el número de pares de polos del PMSM, T L es el par de cargar, β es el coeficiente de fricción mecánica y J es la inercia del rotor.
3. Control directo al par (DTC)
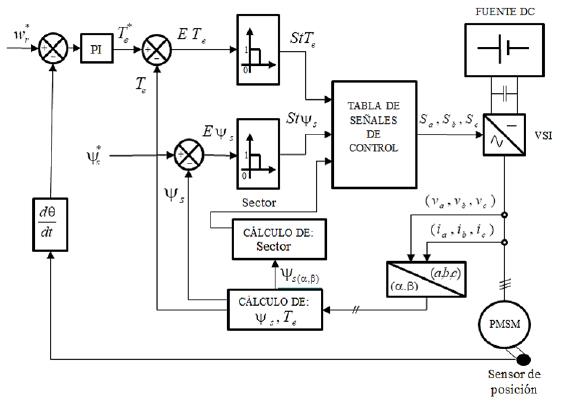
El diagrama del DTC se muestra en la Figura 1, como se mencionó anteriormente con la selección correcta de los vectores espaciales de voltaje que ingresan al inversor se puede controlar de forma directa y por separado el par y flujo.
Donde ETe es la señal de error de la diferencia del par de referencia T* e y el par desarrollado por el motor, Eψ es la señal de error del diferencial del flujo de referencia ψ*/s y el flujo magnético del motor, mientras que las variables StTe y Stψs son los estados de los controladores de histéresis para el par y flujo respectivamente.
A partir de las mediciones trifásicas de corriente (i a , i b , i c ) y de los voltajes (v a , v b , v c ) en el estator, se calcula el par desarrollado Te y el flujo magnético del estator ψs, estos valores son comparados con los valores de referencia e ingresan a unos controladores de histéresis que proporcionan a la salida valores discretos tanto para el error de flujo y par. Entonces de acuerdo con el plano (α β) y al sector donde se encuentre el vector de flujo del estator se selecciona un vector de voltaje adecuado para alimentar al PMSM [11], el cual es proporcionado por las señales de control (Sa; Sb; Sc ).
3.1. Control del par electromagnético, flujo magnético y velocidad
El control DTC se realiza en el sistema de referencia bifásico (α, β), el PMSM se encuentra en el sistema de referencia síncrono (d; q), por lo que es necesario aplicar las trasformaciones de Clarke y Park obteniéndose que el par electromagnético queda expresado por la ecuación (5).

En forma vectorial la ecuación (6) y (7) del flujo del estator se calcula integrando la fuerza contra electromotriz del estator [12], [13].


La magnitud y ángulo del vector de flujo del estator quedan expresados por la ecuación (8) y (9).


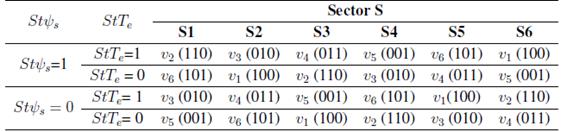
En la Tabla I, se presenta la forma de conmutación de manera que se puede escoger los vectores espaciales de voltaje adecuados según las consignas ingresadas, los vectores se escogen según una combinación del estado del sector, par y flujo 14.
En un control DTC clásico las variables a controlar son el par y flujo, pero dentro de un accionamiento eléctrico, lo indispensable aparte del control de las variables mencionadas se requiere controlar la velocidad. El lazo de control se cierra al medir de la posición eléctrica del rotor θ.Existen varios tipos de control de velocidad, con la utilización de sensores de velocidad o simplemente al estimar la velocidad del rotor [15].
En la Figura 2, se aprecia el lazo de control de velocidad del PMSM controlado por una controlador proporcional integral (PI), la señal de error de velocidad se obtiene con la diferencia de la velocidad de referencia w* r y la velocidad del rotor wr.
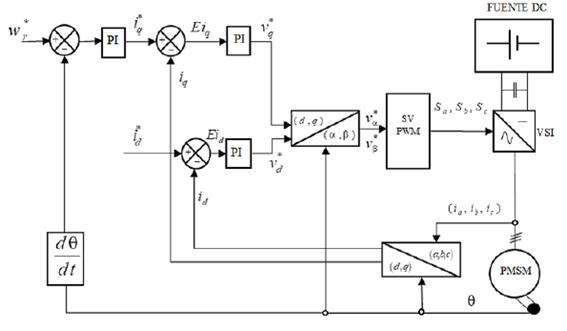
4. Control de campo orientado (FOC)
El principio del FOC es controlar por separado el flujo del estator y el par electromagnético a partir de la medición de las corrientes que alimenta al PMSM en el sistema de referencia bifásico rotatorio (d; q). Se controla el flujo a partir de la regulación de la componente de corriente id, y el par a partir de la regulación de la componente de corriente iq [16], [17]. El diagrama del FOC se muestra en la Figura 3, el control se lo realiza en el sistema de referencia bifásico (d; q), los valores de referencia son las corrientes i* d, i* q para el eje d y eje q, respectivamente. Las corrientes calculadas id , iq se obtiene al aplicar las trasformaciones de Clarke y Park. La diferencia entre las corrientes de referencia y las corrientes calculadas producen un error (Eid, Eiq) que se enviará a los controladores PI, las señales del controlador (v* d, v* q ) serán transformadas con la inversa de Park al sistema de referencia bifásico estacionario (α, β) para ser enviadas a un módulo SVPWM que permite enviar los estados de conmutación correctos al VSI para producir el vector de voltaje que alimente al PMSM.
Donde Eid y Eiq son las señales de error de la diferencia de las corrientes de referencia i* d, i* q y las corrientes medidas id, iq en el eje (d; q), respectivamente; los voltajes de referencia están representados por v* d, v* q y v* α, v* β en los ejes (d; q) y el eje (α,β), respectivamente; las señales de control del VSI son Sa, Sb y Sc; y, finalmente θ representa la posición eléctrica del rotor y por ultimo las corrientes trifásicas están representadas por las variables ia, ib e ic.
4.1. Control del par electromagnético, flujo magnético y velocidad
El objetivo del FOC es mantener constante el ángulo de 90? que forman el vector de flujo del estator con el flujo de los imanes permanentes. Donde la corriente del estator del eje d debe regularse a cero, i.e., id = 0, lo que provoca que Ψd sea fijo. En consecuencia, como el flujo de los imanes permanentes es contante para un PMSM entonces el par electromagnético es proporcional a iq [18], [19]. Para el control de velocidad el lazo se cierra con la velocidad medida del PMSM como se muestra en la Figura 4, donde la señal de error que produce el controlador PI viene a ser la corriente de referencia en el eje q [20]. Para el diseño de los controladores PI se utilizó el criterio de Nyquist mediante el análisis de las curvas de margen de fase y ganancia. Además, para éste análisis se asume que el sistema es lineal si se encuentra en estado estable, la señal de referencia y las perturbaciones de la carga son bajas.
5. Resultados de la comparación de las técnicas de control vectorial
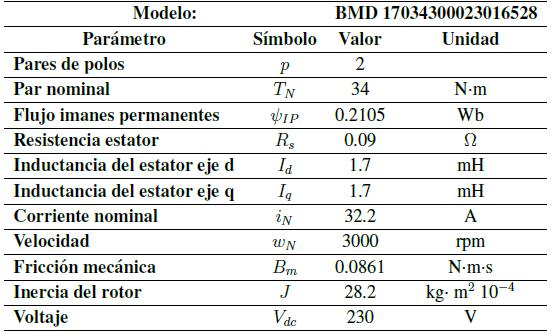
A continuación, se presenta los resultados de la simulación del control directo de par (DTC) y del control de campo orientado (FOC) a un motor síncrono de imanes permanentes PMSM, comparando las variables de par electromagnético, flujo magnético y velocidad, utilizando la plataforma Simulink 8.9 MatlabR (R2017a) [21]. En la Tabla II se presentan los para´metros del PMSM utilizados.
5.1. Par y flujo de referencia
DTC: El par de referencia ingresado es el par nominal del PMSM con un valor de 27.5 (N_m),como se muestra en la Figura 5(a), donde el valor positivo de par nominal dura 0.075s, cambia a su valor negativo por un tiempo de 1s y luego cambia a su valor positivo de 0.175s hasta 0.25s. En la misma figura se muestra el flujo de referencia con un valor constante de 0.2105Wb igual al de los imanes permanentes.
FOC: El diagrama de control FOC presentado solo controla las corrientes en el eje d y q, corrientes que son proporcionales para controlar el flujo y par respectivamente y como el objetivo de la investigación es comparar valores entre las técnicas de control DTC y FOC, entonces , se calculó la corriente de referencia para el par de referencia deseado despejado de la corriente iq de la ecuación (3) y se determinó que para los valores del par de referencia que se van a utilizar requiere de una corriente de referencia de 43.55A para el tramo positivo y para el tramo negativo se requiere de una corriente de -43.55A, mientras que para la corriente en el eje d cera de un valor cero, como se muestra en la Figura 5(b), por ende el par de referencia ingresado es similar al par de referencia para el control DTC tal y como se observa en la Figura 5(a).

5.2. Control del par electromagnético
En la Figura 6, se aprecia que el par electromagnético desarrollado por el PMSM sigue al par de referencia. De acuerdo con el control del par, visualmente la técnica DTC es superior a la técnica FOC, debido a que los rizados del par al aplicar el DTC se encuentra dentro del ancho de banda del controlador de histéresis Δ = Te = 0;8250(N_m), como se observa en la Figura 6(a). Mientras que los rizados del par al aplicar la técnica FOC se observa que tiene valores que superan los 30 (N_m) tal y como se muestra en la Figura 6(b), a continuación, se realiza un acercamiento en diferentes puntos de interés.
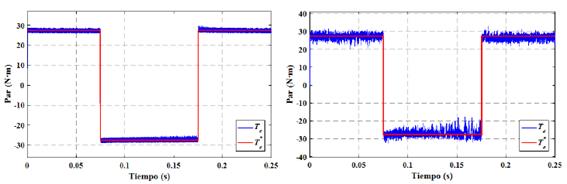
Figura 6 Par de referencia y par desarrollado. (a) Control del par con la técnica DTC. (b) Control del par con la técnica FOC
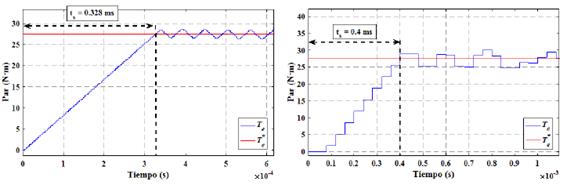
Seguidamente, en la Figura 7 se realiza un acercamiento del par de referencia y el par desarrollado en el instante en que el PMSM arranca para alcanzar el par de referencia, al utilizar el DTC el par producido por el PMSM tarda 0.328ms, mientras que al aplicar el FOC el par del PMSM tarda 0.4ms, como se observa en la Figura 7(a) y Figura 7(b).
5.3. Control del Flujo magnético
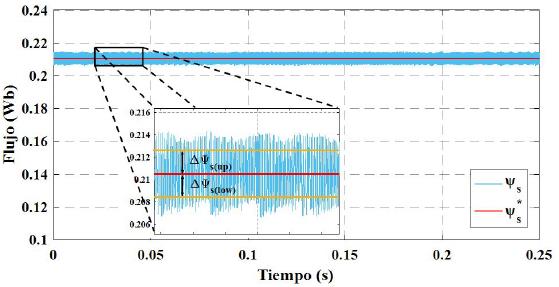
En cuanto al control de flujo en la Figura 8, se aprecia que al aplicar la técnica DTC el flujo se mantiene dentro de los límites establecidos por el controlador de histéresis. En la ecuación (10) se determinan los límites del ancho de banda del controlador de histéresis.

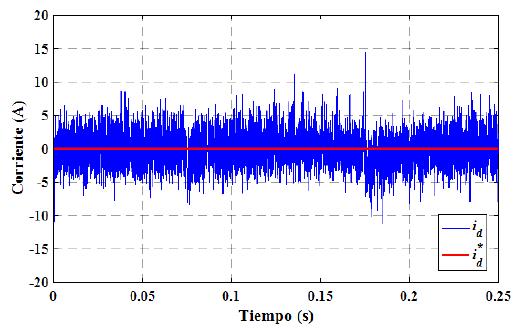
Mientras que en la técnica de control FOC como se mencionó anteriormente el control de corriente id es proporcional al control de flujo por tal motivo se realiza el control de la corriente id con un valor de referencia de 0 A. En la Figura 9 se aprecia que la corriente id medida sigue a la corriente de referencia i* d, pero con rizados que superan los 5 A. Luego de obtener los valores de rizados para el flujo magnético al aplicar las técnicas de control DTC y FOC se determinó que la técnica DTC es superior a la técnica FOC.
5.4. Control de velocidad
La velocidad de referencia ingresada tiene un valor positivo de 1000 (rpm) por un tiempo de 0.1s, luego cambia de velocidad a 500 (rpm) hasta 1.175s, seguido la velocidad de referencia toma un valor positivo de 1000 (rpm).
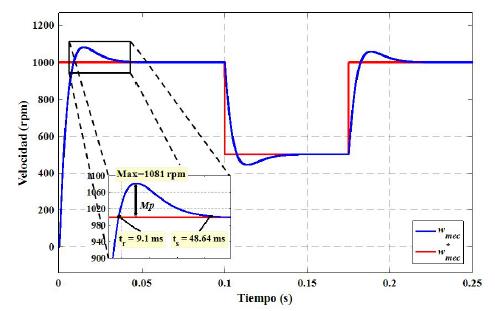
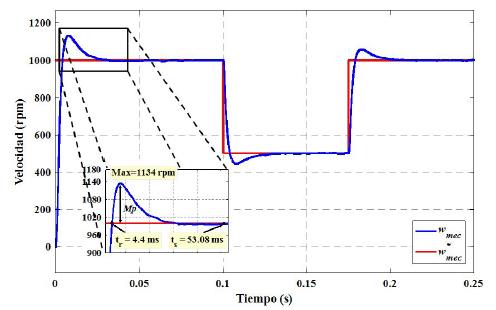
En el análisis realizado del control de velocidad cuando el PMSM arranca, se tiene que al aplicar la técnica de control DTC la velocidad producida del PMSM alcanza a la velocidad de referencia tr = 9;148ms, presenta un sobreimpulso de Mp = 8;1%, un tiempo pico de tp = 14;71ms con una velocidad de 1081 (rpm) y tiempo de establecimiento ts = 48;64ms como se observa en la Figura 10. Mientras que al aplicar el control FOC la velocidad tarda tr = 4;44ms en alcanzar a la velocidad de referencia, con un sobreimpulso Mp = 13;3% un tiempo pico de tp = 7;76ms y se estabiliza en ts = 53;08ms como se muestra en la Figura 11. Consecuentemente, se puede concluir que el comportamiento del DTC es superior al que presenta el FOC en lo que se refiere al control de velocidad.
5.5. Resumen de resultados
La Tabla III, se presenta un resumen completo de los valores obtenidos del control directo del par (DTC) y del control de campo orientado (FOC).
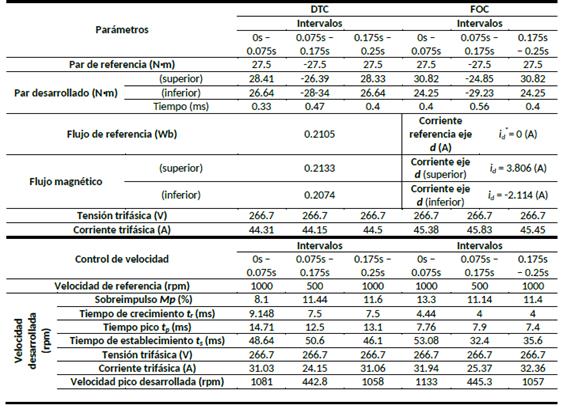
De los valores obtenidos en la simulación de las técnicas de control DTC y FOC en el control del par electromagnético las dos técnicas tienen un tiempo de respuesta menor en alcanzar un par deseado. Donde el FOC tarda 0.07ms más que el DTC, y al alcanzar el par deseado el que presenta mayor rizado en el par es el FOC por lo que se concluye que el DTC tiene mayor control de par en relación al FOC.
Para el control del flujo magnético del PMSM, según los valores obtenidos, el DTC tiene un mejor control que el FOC debido a que el primero realiza el control al enviar el vector de voltaje adecuado al motor de acuerdo con el sector donde se encuentre del vector de flujo y a los estados de los controladores de histéresis, mientras que el FOC solo depende del ciclo de trabajo de los vectores espaciales. Cabe recalcar que el control del flujo con la técnica FOC se analiza controlando la corriente en el eje d, ya que esta es proporcional al flujo, entonces si se controla la corriente por ende se controlara el flujo.
Al controlar el par electromagnético y flujo magnético se toma en cuenta los valores del voltaje y la corriente que influyen en cada técnica de control (DTC y FOC), por ende se puede afirmar que en su mayoría son idénticos, pero al aplicar el FOC la corriente presenta mayor rizado que el DTC, mientras que la magnitud del voltaje trifásicos que alimenta al PMSM son idénticos.
Para el control de velocidad, con base en los valores obtenidos se aprecia que tanto el control DTC como FOC tienen un tiempo de respuesta menor ante perturbaciones, sin embargo, el DTC tiene un tiempo de respuesta menor cuando el PMSM se pone en movimiento desde el reposo, es decir que el DTC tiene una respuesta rápida en el estado transitorio y una vez que el motor se encuentra en movimiento, ante perturbaciones como la disminución de velocidad el FOC tiene mejor control.
Por último, después de analizar los aspectos más importantes para determinar cuál técnica de control es efectiva, se concluye que la técnica de control DTC tiene mayor efectividad de acuerdo con la técnica de control FOC, no obstante, cabe mencionar que las dos técnicas de control son ampliamente utilizadas en el sector industrial en el accionamiento de motores eléctricos por lo que la selección de dichas técnicas dependerá del proceso que se realizará
De los valores obtenidos en la simulación de las técnicas de control DTC y FOC en el control del par electromagnético las dos técnicas tienen un tiempo de respuesta menor en alcanzar un par deseado. Donde el FOC tarda 0.07ms más que el DTC, y al alcanzar el par deseado el que presenta mayor rizado en el par es el FOC por lo que se concluye que el DTC tiene mayor control de par en relación al FOC.
6. Conclusiones
Se realizó el estudio de las técnicas de control utilizadas en motores síncronos de imanes permanentes.Se optó por desarrollar las técnicas de control vectorial FOC y DTC debido a que ambas técnicas rechazan rápidamente las perturbaciones y son fáciles de implementar, además de que en los últimos años estas técnicas de control son las más utilizados en accionamientos eléctricos, resaltando el control del par electromagnético y flujo magnético por separado, también del control de velocidad del PMSM. Para realizar el modelo matemático del motor síncrono de imanes permanentes se parte del estudio de las transformadas de Park y Clarke debido a que la ecuación eléctrica del PMSM se encuentra en el sistema de referencia trifásico y al aplicar las trasformadas se obtiene el modelo del PMSM en el sistema bifásico síncrono (d, q), lo que permite tener una facilidad para aplicar el control DTC y FOC.
Asimismo, se llevó a cabo el análisis detallado y la simulación del control DTC, mediante la selección de los vectores de voltaje que controlan el par y flujo, manteniéndose dentro del ancho de banda del controlador de histéresis, el PMSM se tarda 0.328ms en alcanzar el par deseado de 27.5 (N_m). Por tener controladores de histéresis tanto el flujo como el par presentan rizados que sobrepasan el ancho de banda de los controladores, donde alcanzan valores de hasta el 3.1% del par de referencia y 1.28% del flujo de referencia. Para el control de velocidad se realizó con la medición directa de la velocidad del PMSM, pues con el controlador PI se obtuvo un tiempo de establecimiento de 48.64ms y un sobreimpulso de 8.1% durante el arranque. Al simular el FOC para el control de flujo y par, mediante el control de las corrientes en el sistema de referencia síncrono (d; q), se obtuvo que el par del PMSM tarda 0.4ms en alcanzar el par deseado. El par y la corriente id, presentan rizados con valores que llegan hasta el 12.07% del par de referencia y 0.038% para la corriente del eje d, mientras que, para el control de velocidad, para alcanzar 1000 (rpm) se tarda 53.08ms en estabilizarse con un sobreimpulso de 13.3 %.
Finalmente, al analizar y comparar los datos relevantes obtenidos de la simulación de los dos controladores FOC y DTC se puede concluir que, el control DTC es superior al FOC en el control del par y flujo, mientras que para el control de velocidades el DTC sigue siendo superior, pero en el instante que arranca el PMSM, pero que una vez que el motor se encuentra en movimiento y se presenta una perturbación el control FOC presenta una rápida respuesta. Entonces se afirma que el DTC es más efectivo que el FOC, sin embargo, ambos controladores presentan un tiempo de respuesta menor, consecuentemente las técnicas de control DTC y FOC son eficientes, y la selección de estas técnicas dependerá de la aplicación requerida.

