










Services on Demand
Journal
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería y Desarrollo
Print version ISSN 0122-3461On-line version ISSN 2145-9371
Ing. Desarro. no.25 Barranquilla Jan./June 2009
Estimation of rear-end potential conflict using Time-to-collision model
Estimación de potenciales choques traseros utilizando modelos de tiempo para colisión
Jalil Shahi*, Bahar Namaki Araghi**, Aliasghar Mehdizadeh***
* School of Civil Engineering, Iran University of Science & Technology, Tehran (Iran). jalil@iust.ac.ir
** School of Civil Engineering, Iran University of Science & Technology, Tehran (Iran). bahar.namakiaraghi@gmail.com
*** School of Civil Engineering, Iran University of Science & Technology, Tehran (Iran). mehdizadeh.iust@gmail.com
Correspondence: Iran, Tehran, Narmak, University Science and technology, School of civil engineering. info@civileng.iust.ac.ir
Grants: This research is supported by Transportation Research Institute of The Ministry of Road and Transportation of The Islamic Republic of Iran.
Abstract
One of the crucial factors to relieve the potential danger of rear-end collision is to synchronize the behavior of the lead and following vehicle on target lane, which includes the relative speed to the leading vehicle on the target lane and the time headways to both the leading and following vehicles on the target lane as the explanatory variables. In view of the rear-end conflicts importance, here it is tried to find out the critical headway of the vehicles in which vehicles encounter with this kind of Traffic Conflicts, based on Traffic Conflict Technique. It was also aimed at introducing a model to estimate the number of vehicles with rear-end conflict potential on the basis of physical and traffic equations in signalized intersections. Moreover rear-end potential conflicts have been calculated by modeling in MATLAB, then by comparison of the field observation and outcome of the model the accuracy of the model has been estimated.
Key words: Traffic Conflict Technique, Rear-End Conflict, Critical Headway, TTC.
Resumen
Uno de los factores relevantes sobre el peligro potencia de colisiones traseras es sincronizar el comportamiento del vehículo que va adelante y el que lo sigue, considerando como variables relevantes la velocidad relativa entre ellos y la brecha. Dada la importancia de este tipo de colisión, en el presente artículo se busca encontrar la brecha crítica entre vehículos relativa a este tipo de conflicto de tránsito. A su vez, se introduce un modelo para estimar el número de vehículos con potencial conflicto de colisión trasera a partir de modelos aplicados a intersecciones semaforizadas. Adicionalmente, en un caso práctico los potenciales conflictos de colisión trasera fueron estimados utilizando Matlab y los resultados comparados con observaciones de campo.
Palabras clave: Conflictos de tránsito, colisión trasera, brecha crítica, TCC.
Fecha de recepción: 17 de septiembre de 2008
Fecha de aceptación: 22 de enero de 2009
1. INTRODUCTION
The historical crash data have been used widely as a direct measure of safety at intersections and other locations. However, attempts to estimate the relative safety of a highway facility are usually hindered by the unreliability of crash records and the long period to achieve adequate sample sizes, furthermore non-accessible accident database in Iran, dictated the need for a surrogate safety measure which can be used to overcome these problems. Traffic conflict analysis provides useful information for determining the predominant conflict types, identifying hazardous intersections, and assessing the effectiveness of safety actions, hence based on the technique’s ability to estimate the potential risk of intersections this method is selected.
The Traffic Conflicts Technique (TCT) is a method of observation, where near-accidents are recorded and used for predictions of accident risk and for studies of events leading to accident situations. A traffic conflict is defined as ìan event involving two or more road users, in which the action of one user causes the other user to make an evasive maneuver to avoid a collisionî [1]. The core of TCT is the identification and recording of serious conflicts by human observers. These events can be characterized by the fact that the closeness to a collision is very imminent. In this method safety analysis is based on number and severity of Conflicts recorded during a limited period (one week).
The ability of this method in predicting the number of accidents and potential risk of road network (specially intersections) in one side and also limited field observation time and low costs on the other side, caused that Traffic Conflict Technique become a widely use in safety analysis in many countries.
Owing to different maneuver and various combinations of motions in an intersection, there would be different potential conflicts in each one. Within this general framework, a basic set of conflict definitions were developed for intersections, corresponding to the different types of maneuvers and related accident patterns. Similar to the manner in which accidents are grouped by type of collision, traffic conflicts are categorized by type of maneuver.
A rear-end potential conflict occurs when the first vehicle slows while approaching or passing through the intersection, placing a second following vehicle in danger of a rear-end collision. The rear-end crash type encompasses collisions that occur when the front of a following-vehicle strikes the rear of a lead-vehicle, while both traveling in the same lane. When an impending rear-end crash situation develops, a crash is almost always avoided.
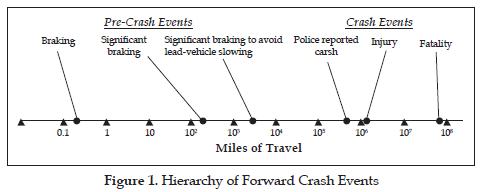
On average, a single driver will brake about 50,000 times per year to avoid crashing into a lead-vehicle. A rear-end crash occurs only about once every 2.5 million brake applications (Farber, 1991)[2]. Figure 1 illustrates the scale of braking events in terms of miles driven and shows the infrequency of a rear-end crash. Nonetheless, rear-end collisions comprise about 25% of all police-reported collisions in the United States, or approximately 1.8 million collisions per year. They also account for about 2,000 fatalities and over 800,000 injured occupants [3]. Therefore simulation of driver’s behavior and using rear-end potential conflicts has been considered by many researchers and engineers and till now many studies were developed in this field, car following theory. Therefore, this study applies the concept of traffic conflict potential for making the objective evaluation on rear-end potential conflicts in signalized intersections.
2. Rear-End conflict
TTC index has been widely used in evaluation of potential conflict. In an impending forward crash; the following-vehicle driver must decelerate to avoid a crash. If not, the following vehicle will eventually make contact with the lead-vehicle at the time-to-collision (TTC). Thus, the TTC is a projection into the future of current conditions. In the case of rear-end potential conflicts, TTC represents the time remained until the following vehicle collides with the tail of vehicle in front under the assumption that the speed and direction of the vehicles do not change. The Speed-Time diagram for both lead and following vehicle is shown in figure (2).

Beside the speed variation, the distance between two vehicles in the time of brake and that must be considered as an important factor, in which these distances can reflect the severity of traffic conflicts occurred between two vehicles. Hence, a TTC time-history is helpful in understanding how the severity of a conflict changes as an impending crash draws nearer.
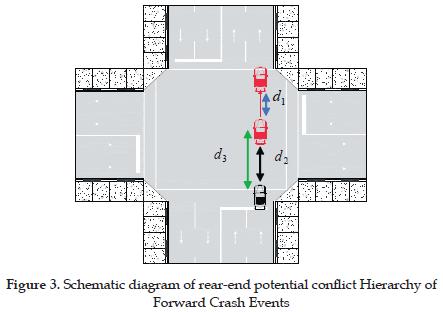
In case that the distance the target vehicle travels after emergency brake exceeds the summation of the distance the vehicle in front travels after emergency brake and distance between the vehicles d1 + d2 - d3 < 0; consequently, the accident occured.
Where:
d1: The distance the vehicle in front travels after emergency brake
d2: Distance between the vehicles
d3: The distance the target vehicle travels after emergency brake
This situation is shown in figure (3).
Relation between TTC and travel distance in potential conflict situation is based on cinematic equations.
2.1. The method of calculating rear-end potential conflictOne of the crucial factors to relieve the potential danger of rear-end collision is to synchronize the behavior of the lead and the following vehicle on target lane, therefore determination of relative speeds of both vehicles play an important role. On the grounds that, the relative speed and the time headway between both lead and following vehicle are considered as the explanatory variables of the model.
In estimation of rear-end potential conflicts, there are some hypothesis considered:
- This special kind of traffic conflicts is not restricted into a special period of the green time for each approach. Once the green time begins in approach i, rear-end potential conflict can occure.
- This special kind of traffic conflicts can occur in each situation and special conflict zones cannot be considered. Hence geometric design is not entered.
- Driver Perception-reaction time and also acceleration rate of vehicles vary widely, however, because of low average speeds in intersections, in order to simplify the model these two factors assumed to be fixed (driver perception-reaction time1s and acceleration rate 1.3 m/s2).
Because of low vehicle speeds in intersections and no access to distance and speed measuring instrument, identifying the lower level of rear-end potential conflict was not possible. Therefore, after reviewing the previous studies and based on Hydén theory, lower level of potential conflict assumed to be TTC=1.5s.The upper level of rear-end potential conflict were estimated by analyzing the recorded films of selected intersections and applying the simulated speed of vehicles in each rear-end conflict situation.
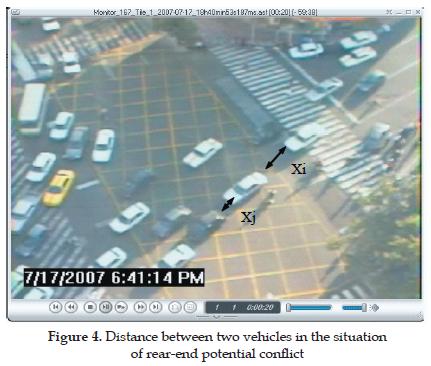
In order to determine the upper level of TTC, first 35 identified vehicles which were in the situation of rear-end potential conflict tracked and observed. In this method, after identification of ear-end potential conflict situations in recorded films, the distance between two vehicles based on the predetermined scale (vehicle dimension) is measured. Two samples are shown in the figure (4).
Then by assuming V0 following vehicle equal to simulation average speed and acceleration rate of 1.3 m/s2, TTC is calculated from the equation (1).


Statistical test on the result of these observations confirms the normality of calculated TTCs with mean 1.866 and standard deviation 0.475 for this sample. In order to extend the result of this sample to the whole TTC society, base on equation (2) in confidence level of 95% and 10% error, the calculated sample size is 32. Thus the sample size obtained as number TTC in rear-end potential conflict situations is less than the sample sized actually considered (35 TTC in rear-end potential conflict situation). This implied that the sample size considered was adequate for this study.
Where:
The confidence distance of upper level of TTC at α = 5% based on equation (3), is calculated between [1.7, and 2.01]. Finally TTC=2s for the upper level of rear-end potential conflict TTC is selected.

Where:
Assuming a δ s driver perception-reaction time, the lower and upper bound of potential conflict headway which could result in rear-end potential conflict can be calculated through equation (4).

Based on equation (4), with assumption of driver perception- reaction time δ = 1s and critical lower bound of rear-end potential conflict TTCL=1.5s and upper bound of potential rear-end conflict in selected intersections TTCu=2s, upper and lower bound of critical rear-end potential conflict headway gives:
It is also assumed that the headway of the opposing traffic follows a negative exponential distribution (a typical assumption in this context.) Then theprobability of a headway falling between the lower (tli) and upper (tu) bound of potential conflict headway can be calculated from equation (5):

Where:
The following equation provides the number of vehicles that will be affected by potential conflict:

Where:
3. DATA COLLECTION
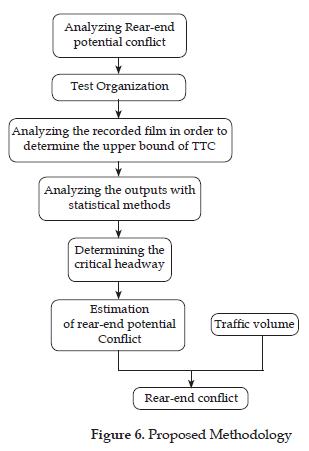
Based on proposed methodology, in order to calculate rear-end potential conflicts, volume of movements, acceleration rate and driver perceptionreaction time must be collected. Then, by running the program in MATLAB, the probability of rear-end conflict based on the predetermined model in 15 intersections are estimated. Moreover, by comparison of programs outputs and actual rear-end conflicts in selected intersections, the accuracy of the proposed model is estimated. These actual rear-end conflicts are collected via observing the recorded films of Tehran Traffic monitoring and control organization, Iran. As mentioned before the Traffic Conflicts Technique (TCT) is a method of observing the situation in which the action of one user causes the other user to make an evasive maneuver to avoid a collision, unless the probability of accident will be increased significantly.
4. MODEL VALIDATION
By comparing the actual recorded rear-end conflicts with program’s outputs, the accuracy of the model, based on equation (7) is estimated:

Where:
Comparison of the program’s output (based on proposed model) and field observations estimate the model’s error 8.86.
5. CONCLUSION
The high accuracy of the proposed rear-end potential conflict model confirms the appropriate selection of TTC=2s for upper bound of rear-end potential conflict. According to low and acceptable error of proposed rearend potential conflict estimation method, this method can be considered as a surrogate method for the field observation.
Maneuvering vehicles by drivers including the usage of brake might be strongly influenced by their attitudes toward the risk of vehicle collision.
REFERENCES
[1] AL Burgett, RJ Miller, A new paradigm for rear-end crash prevention driving performance, SAE paper number 2001-01-0463, Society of Automobile Engineers, Warrendale, PA., 2001. [ Links ]
[2] EI Farber, Intelligent vehicle highway systems - safety benefits and public policy, Paper number, 13th International Technical Conference on Experimental Safety Vehicles, Paris, France S2-O-01,Proc., 1991. [ Links ]
[3] D. Harwood, et al., Prediction of the expected safety performance of rural two-lane highways, Report No. FHWA-RD-99-207. Federal Highway Administration, Washington, DC. 2000 [ Links ]
[4] National Research Council, Highway Capacity Manual 2000. TRB,Washington, D.C., 2000 [ Links ]
[5] C. Hyden, The Development of a Method for Traffic Safety Evaluation: The Swedish Traffic Conflicts Technique. Bulletin 70, Department of Traffic Planning and Engineering, Lund Institute of Technology, 1987. [ Links ]
[6] R. Kiefer, D. LeBlanc, M. Palmer, J. Slainger, R. Deering, M. Shulman,, Development and validation of functional definitions and evaluation procedures for collision warning/avoidance systems, NHTSA report number, DOT HS 808-964, U.S. Department of Transportation, Washington DC, 1999 [ Links ]
[7] D.J. Migletz, W.D. Glautz, K.M. Bauer, Realationships Between Traffic Conflicts and Accidents, Report No. FHWA/RD-84/042, Federal Highway Administration, Washington, D.C., 1985 [ Links ]
[8] S.R. Perkins, and J.L. Harris, Traffic Conflict Characteristics-Accident Potential at Intersections. In Highway Research Record 225, HRB, National Research Council, Washington, D.C., pp. 35-44, 1968 [ Links ]
[9] W.D. Glauz and D. J. Migletz, Application of Traffic Conflict Analysis at Intersections, NCHRP Report 219, Transportation Research Boars, Washington, D.C., 1980 [ Links ]

