










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería y Desarrollo
Print version ISSN 0122-3461On-line version ISSN 2145-9371
Ing. Desarro. no.25 Barranquilla Jan./June 2009
Estudio computacional con técnicas heurísticas basadas en recocidos para resolver el problema de secuenciación de tareas
A Computational Study Solving the Flow Shop Problem with Annealing-Based Heuristics
David Álvarez Martínez*, Eliana Mirledy Toro Ocampo**, Ramón Alfonso Gallego Rendón***
* Ingeniero en Sistemas y Computación. Docente catedrático, Programa de Ingeniería de Sistemas y Computación, Universidad Tecnológica de Pereira. akavallo@gmail.com
** Magíster en Investigación de Operaciones y Estadística, Magíster en Ingeniería Eléctrica. Docente asistente, Facultad de Ingeniería Industrial, Universidad Tecnológica de Pereira. elianam@utp.edu.co
*** Doctor en Ingeniería Eléctrica Área de Automática. Docente titular, Programa de Ingeniería Eléctrica, Universidad Tecnológica de Pereira. ragr@utp.edu.co
Resumen
El secuenciación de tareas es una labor diaria de muchas empresas del sector de productos y servicios donde se busca optimizar algún o algunos de varios objetivos; aquí se propone minimizar el tiempo total de ejecución de todas las tareas. En este documento se presentan los resultados de un estudio computacional extensivo de 11 heurísticas basadas en el recocido: recocido simulado, aceptando el umbral, grabado a grabado y 8 heurísticas basadas en algoritmos demons. Para validar la calidad de las respuestas se seleccionaron 30 problemas de la literatura especializada. Se presentan los resultados obtenidos donde se compara la calidad de la solución con los tiempos de ejecución.
Palabras claves: Algoritmos demons, Flow-Shop, heurísticas, recocido simulado, secuenciación de tareas.
Abstract
Task sequencing is a daily job of many companies of the products sector and services, where it is sought to optimize one or several objectives. It is proposed here to minimize the total execution time of all tasks. This document presents the results of an extensive computational study of eleven heuristics based on annealing: Simulated Annealing, Threshold Accepting, Record-to-Record and 8 heuristics based on demon algorithms. To validate the quality of the answers, test cases of the specialized literature are used and the results obtained were compared in the quality of the solution and run times.
Key words: Demons algorithms, flow-shop, heuristics, simulated annealing, sequencing of tasks.
Fecha de recepción: 3 de septiembre de 2008
Fecha de aceptación: 24 de marzo de 2009
1. INTRODUCCIÓN
Muchos trabajos de ingeniería, planificación y manufactura pueden ser modelados como problemas de minimización o maximización de una función de costo sobre un conjunto de variables discretas. Esta clase de eventos son llamados problemas de optimización combinatorial; han recibido una gran atención en el campo de la ciencia durante las últimas tres décadas con el logro de grandes avances. Uno de los avances que se han realizado es la subdivisión de este tipo de problemas en dos categorías: los que se pueden resolver eficientemente o aquellos donde existe un algoritmo que resuelve toda instancia del ejercicio en un tiempo polinomial, como la programación lineal, y problemas para los cuales no se conoce un algoritmo que resuelva toda instancia de la situación propuesta en tiempo polinomial. Estos últimos son referenciados formalmente como NP; el problema de secuenciación de tareas es considerado de acuerdo a su complejidad matemática como NP- completo.
El problema de secuenciación de tareas en sistemas de producción lineal, Flow-Shop, se caracteriza porque todos los trabajos que van a ser programados tienen el mismo flujo de producción, aunque varían los tiempos de ejecución en cada una de las estaciones. Para resolverlo se han propuesto diferentes técnicas y metodologías a fin de encontrar la secuencia óptima de fabricación que cumple con diferentes objetivos, como la inexistencia de tiempos muertos de fabricación, reducción de tiempo de cambio y ajuste de las máquinas, anulación de retrasos, entre otros, pero teniendo en cuenta las restricciones propias de cada situación específica como la velocidad de proceso de las máquinas, capacidad de recursos humanos y materiales, etc.
Las técnicas metaheurísticas han mostrado su gran potencial como herramientas de solución en variados campos de aplicación por su eficiencia en cuanto a tiempos de solución y calidad de las respuestas obtenidas. Aquí se están proponiendo 11 técnicas basadas en algoritmos recocidos para la solución del problema Flow-Shop que considera como función objetivo la minimización del tiempo total de ejecución de todas las tareas y se comparan las respuestas obtenidas con las reportadas en la literatura especializada.
Este documento está organizado de la siguiente forma: en la sección 2 se describe el problema del Flow-Shop y su modelamiento matemático; en la sección 3 se presentan algunas generalidades de los algoritmos utilizados; en la sección 4 se presenta el procedimiento empleado para calcular la función objetivo, la estructura de vecindad y la adecuación de los algoritmos al problema especifico; en la sección 5 se presentan los casos de prueba y los resultados obtenidos y, finalmente, en la sección 6 se plantean las conclusiones y trabajos futuros con respecto a los problemas de secuenciación.
2. DEFINICIÓN DEL PROBLEMA DEL FLOW-SHOP
El problema del Flow-Shop permutacional representa un caso particular del problema del Flow-Shop Scheduling cuyo principal objetivo es entregar una secuencia óptima para N trabajos en M máquinas.
La solución del problema consiste en secuenciar n trabajos (i=1,..., n) en m máquinas (j=1,...m). Un trabajo consiste en m operaciones y la j-ésima operación de cada trabajo debe ser procesada en la máquina j, se debe considerar que:
- Al iniciar un trabajo en la máquina j este ya ha sido procesado en la máquina j-1 y, adicionalmente, la máquina j no está ejecutando operación alguna. Cada operación tiene un tiempo de procesamiento conocido Pij
- Si un trabajo está en la i-ésima posición en la máquina 1, entonces ese trabajo estará en la posición i-ésima en todas las máquinas.
- La secuencia de producción de todos los trabajos es igual.
- No se consideran tiempos de ajuste de las máquinas entre un trabajo y otro.
- Cuando se inicia la ejecución de un trabajo en una máquina no puede ser interrumpido.
- El makespan es un parámetro que indica el tiempo total de ejecución de todas las tareas.
Para la solución del problema del Flow-Shop permutacional se considera el makespan como función objetivo a ser minimizada, resolver el problema significa determinar la permutación que entregue el menor valor de makespan. En este contexto se considera el trabajo Ji como un conjunto de operaciones, que pasan por cada máquina una sola vez:
- Ji{oi1, oi2, oi3, ... , oiM}, donde oij representa la j-ésima operación del trabajo Ji;
- oij operación debe ser procesada en la Mj máquina;
- Por cada operación oij hay asociado un tiempo de procesamiento pij.
Tradicionalmente, la notación del problema es F|permu|Cmax considerando como objetivo minimizar todo el tiempo de procesamiento (makespan).
Un ejemplo del problema permutacional del Flow-Shop se describe a continuación:
Se definen Π1,Π2,Π3 como permutaciones. El cálculo del tiempo final C(Π1, j) para el i-ésimo trabajo dado en la permutación Π en la máquina j puede ser calculado de la siguiente forma: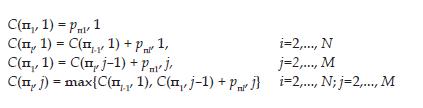
Bajo estas especificaciones, el valor de la función objetivo, el makespan Cmax, se define como C(ΠN, M); el tiempo completo de la última operación en la última máquina.
Este problema, como muchos otros en el campo de secuenciación, tiene muchos inconvenientes por resolver ya que técnicamente está clasificado como NP-difícil. Sin entrar en detalles técnicos se dice que un problema es NP-dífícil cuando se demuestra que cualquier algoritmo de solución tiene un tiempo de ejecución que aumenta exponencialmente con el tamaño del problema [1]. El que un problema esté catalogado en esta categoría no significa que no puede resolverse, sino que se deben proponer algoritmos de solución que exploten de forma eficiente su misma estructura matemática para que se encuentren soluciones a la mayoría de las instancias del problema, en tiempos de ejecución relativamente pequeños.
3. HEURÍSTICAS DE BÚSQUEDA LOCAL
Durante los últimos cuarenta años se han desarrollado gran cantidad de heurísticas para la solución del problema de secuenciación de tareas, buscando mejorar el makespan, de forma iterativa, donde cada nueva secuenciación toma un menor tiempo Cmax. En los años noventa, las investigaciones se centraron en aplicar metaheurísticas de propósito general para el problema del Flow-Shop. Las metaheurísticas seleccionan configuraciones que a veces incrementan el makespan y de ese modo obtienen una herramienta para no quedar atrapadas en óptimos locales de mala calidad. En esta sección, se describirán 11 metaheurísticas para el problema del Flow-Shop: recocido simulado, dos tipos de recocidos determinísticos y ocho variantes de algoritmos demons.
3.1. Recocido simulado
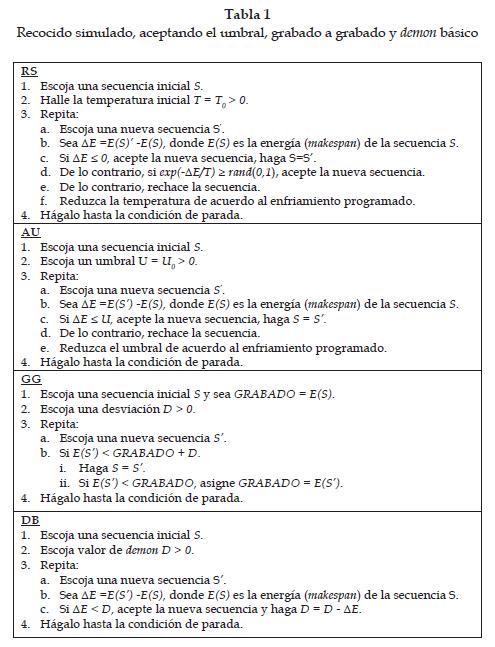
El algoritmo del recocido simulado (RS) reproduce un conjunto de átomos en equilibrio a una temperatura determinada. El RS empieza con un estado inicial; luego se propone un cambio aleatorio para este estado y se genera un cambio de energía:ΔE es calculado [1] [2]. Si el nuevo estado tiene un nivel más bajo de energía que el estado anterior, ΔE ≤ 0, el nuevo estado, es tomado para la siguiente iteración. Sin embargo, si el nuevo estado tiene un nivel de energía más alto que el anterior, se acepta con una probabilidad P(ΔE) = exp(-ΔE/kB. T), donde T es la temperatura y kB es la constante de Boltzmann. Esta característica hace que el RS sea diferente a los algoritmos de búsqueda local. El algoritmo RS es presentado en la tabla 1.El programa de enfriamiento en el paso 3.f del RS es crucial para el éxito del algoritmo. El valor de aceptación de un empeoramiento de la energía se mueve inversamente proporcional al ΔE y proporcionalmente a T, que decrece con el tiempo. Si se configura inteligentemente el enfriamiento, el algoritmo puede escapar temprano de óptimos locales y explorar en profundidad otras regiones prometedoras.
3.2. Recocidos determinísticos
Se presentan dos versiones determinísticas del recocido simulado que se denominan: aceptando el umbral y grabado a grabado [2] y [3]. Un movimiento de empeoramiento es aceptado, si la desmejora en la función objetivo es menor que un monto determinado.
- Aceptando el umbral (AU): un umbral U es especificado como se muestra en la tabla 1. Este umbral es la cuota máxima de decremento de la función objetivo aceptada entre una iteración y la siguiente. En el paso 3.c de AU, una nueva secuencia de tareas es aceptada solo si ΔE el cambio de energía, es menor que U, Así, son aceptadas configuraciones con peor función objetivo. En el paso 3.e de AU, el umbral es enfriado de acuerdo a lo programado.
- Grabado a grabado (GG): en el algoritmo de grabado a grabado tal y como se muestra en la tabla 1, el GRABADO es el mejor makespan encontrado hasta el momento. Esta técnica solo puede explorar soluciones con makespan menor que la desviación, D, más el GRABADO (ver paso 3.b la tabla 1). Así, el GG permite aceptar empeoramientos en la función objetivo de una nueva configuración, pero el valor de GRABADO + D sirve como límite de la desmejora que puede ser aceptada.
3.3. Algoritmos demons
Los algoritmos demons son una variante del recocido simulado [5], [6]. El algoritmo demon reemplaza la probabilidad de aceptación de una configuración con peor función objetivo por el concepto de crédito llamado demon. Cuando el algoritmo acepta una secuencia con función objetivo de peor calidad, el crédito o demon decrece con relación al deterioro de la nueva configuración. Similarmente, si la nueva secuencia es de mejor calidad que la anterior, se debita al demon la mejora de la función objetivo. Una nueva secuencia de peor calidad solo será aceptada si el demon tiene suficiente crédito para pagar la desmejora. El algoritmo demon básico (DB) es dado en la tabla 1.
Wood y Downs [5], [6] modificaron el DB y desarrollaron cuatro algoritmos demons estándares para optimización: algoritmo demon limitado (DL), algoritmo demon aleatorio limitado (DAL), algoritmo demon recocido (DR) y algoritmo demon aleatorio recocido (DAR). Los algoritmos DL, DAL, DR y DAR son presentados en la tabla 2.
El DB es su forma original no es un algoritmo apropiado para minimización. Wood y Downs [5], [6] propusieron dos modificaciones que remueven gradualmente energía del demon para enfrentar la minimización. Una modificación es imponer un límite superior específico como valor al demon para que pueda restringir valores de crédito, después de movidas con decrementos de energía. El límite superior previene al demon en contra de recibir todo el crédito, de aceptar secuencia de peor calidad. Esta modificación es incorporada en el algoritmo DL (el límite superior es dado por D0. Ver su implementación en el algoritmo DL en la tabla 2).
La segunda modificación reduce el valor del demon acorde a una programación específica de la misma forma que Kirkpatrick y otros [2] disminuyen la temperatura en RS. Esta modificación es incorporada en el algoritmo demon recocido (DR). Con estas dos modificaciones, un algoritmo disminuye el crédito dado al demon. Un algoritmo tendrá menor probabilidad de aceptar secuencias de peor calidad después de aceptar configuraciones con bajos valores de makespan, pues este es forzado a buscar secuencias de mejor calidad.
Wood y Downs intentaron incorporar en los algoritmos DL y DR componentes aleatorios en los cuales el valor del demon fuera reemplazado por el valor medio del demon y para que este, a su vez, hiciera el papel de acreedor. El valor del demon es una variable aleatoria gaussiana (normal) centrada alrededor del valor medio del demon (DM) con una desviación estándar específica (DSd).
Las dos versiones aleatorias (DAL y DAR) de los algoritmos limitados y recocidos se obtienen reemplazando D con DM (ver la tabla 2) y agregando el paso (3.d en la tabla 2) para generar el valor del demon de una distribución con media DM + un valor de ruido gaussiano. Por el uso de componentes aleatorios, Wood y Downs alcanzan largos incrementos en energía que no son permitidos por algoritmos determinísticos.
Se señala que Wood y Downs probaron los cuatro algoritmos (DL, DAL, DR y DAR) para instancias del problema del cartero viajante.
3.4. Variantes del algoritmo demon
Estas versiones fueron construidas con base en cuatro algoritmos demons estándares presentados por Pepper, Golden y Wasil [7]: algoritmo demon recocido limitado (DRL), algoritmo demon aleatorio limitado recocido (DARL), algoritmo demon recocido híbrido (DRH) y algoritmo demon recocido limitado híbrido (DRLH). Los algoritmos DRL, DARL, DRH y DRLH son presentados en la tabla 3.
En DRL y DARL se aplicaron límites y enfriamiento al valor del demon esperando que este forzara al valor del demon a decrecer lentamente durante el proceso. Esto puede llevar a secuencias de alta calidad.
En el DARL se enfría la desviación estándar del valor del demon además de enfriarse el valor medio del demon. En el DRLH, se enfría la desviación estándar del valor del demon y se enfría el valor límite del demon. Se tienen así diferentes enfriamientos programados para la desviación estándar, el valor medio del demon y el valor límite del demon. Al mismo tiempo, los componentes aleatorios son reducidos por lo que las versiones híbridas tienden hacia su contraparte determinística.


4. PROCEDIMIENTOS
4.1. Codificación del problema
4.1.1. Matriz de tiempos
Los tiempos de duración de cada operación para un trabajo determinado en una máquina se representan mediante una matriz, que se denomina matriz de tiempos o matriz de duración con la arquitectura mostrada en la figura 1.
La columna j de la matriz de tiempos representa el tiempo que tarda en finalizar cada operación en la máquina i. La operación del trabajo 1 en la máquina 1 toma 5 unidades de tiempo, D1,1 = 5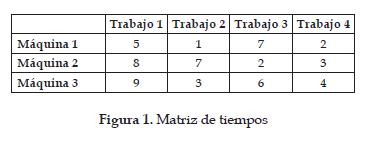
4.1.2. Secuencia de trabajo
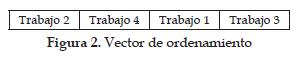
El orden de entrada de los trabajos a las máquinas se representa mediante un vector, donde su propia longitud indica el número de trabajos a procesar; cada elemento dentro del vector representa la tarea que se ejecutará en cada posición, como se observa en la figura 2. Si se lee de izquierda a derecha, el trabajo 2 es el primero que se ejecutará y el trabajo 4 está en la segunda posición del vector; esto representa que el trabajo 4 entrará en segunda instancia.
4.1.3. Cálculo del makespan
El cálculo del makespan guarda relación con la matriz de tiempos y la secuencia de trabajo, el Flow-Shop presenta las siguientes particularidades: el primer trabajo programado solo debe respetar la secuencia tecnológica y la primera máquina nunca tiene tiempo ocioso entre tareas; estas dos propiedades permiten llenar la primera columna y la fila de la matriz de inicio de la siguiente forma:
- El tiempo de inicio de la operación del primer trabajo en la máquina i será el tiempo de inicio de la operación del primer trabajo en la máquina i-1 más el tiempo de duración de la operación del primer trabajo en la máquina i-1.
- El tiempo de inicio de la primera operación del trabajo j en la primera máquina, donde 1 < j < n, será el tiempo de inicio de la primera operación del trabajo j-1 en la primera máquina más el tiempo de duración de la primera operación del trabajo j-1 en la primera máquina.
T i,1 = T i-1 + D 1,i-1, donde 1 < i < m.
T 1, j = T 1, j-1+ D1,j-1, donde 1 < j < n.
Para terminar la construcción de la matriz de inicio se recorre por columnas o filas y el tiempo de inicio Ti,j será el máximo entre:
- El tiempo de inicio Ti, j-1 más el tiempo de duración Di,j-1
- El tiempo de inicio Ti-1, j más el tiempo de duración Di-1,j
Luego de terminada la matriz de inicio, el valor del makespan es la suma de las dos esquinas inferiores localizadas a la derecha tanto de la matriz de tiempos ordenada como de la matriz de inicio, Dm, n + Tm,n = makespan
Ejemplo de aplicación del algoritmo para calcular el makespan
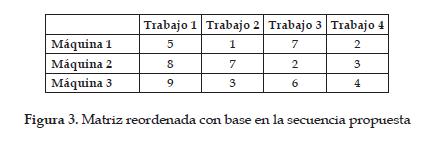
Paso 1. Reordenar la matriz de tiempos según la secuencia dada tal como se muestra en la figura 3.
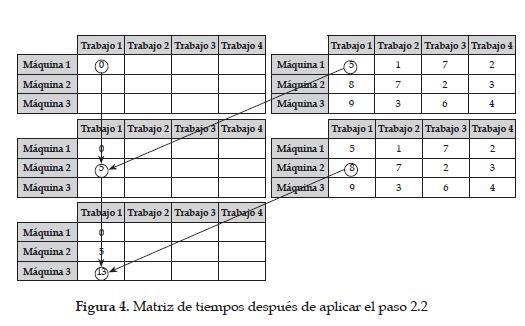
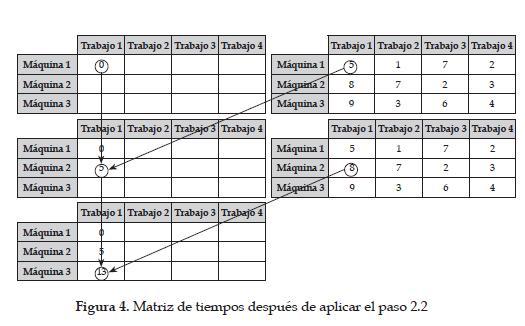
Paso 2. Crear la matriz de tiempos tal y como se muestra en la figura 4.
Paso 2.1 Ubicar un cero en la esquina superior izquierda.
Paso 2.2 Ti,1 = T i-1, 1 + D i-1, 1. Figura 4.
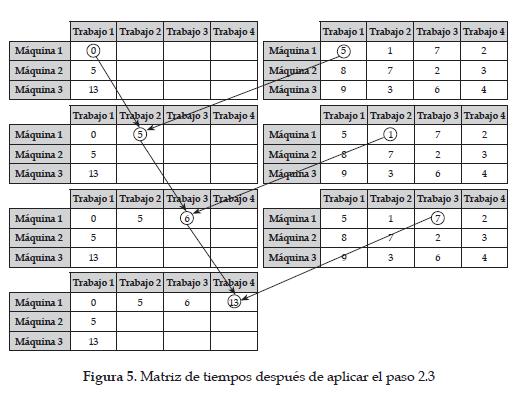
Paso 2.3 T 1, j = T 1, j-1 + D 1, j-1. Figura 5.
Paso 2.4 Máximo entre el tiempo de inicio Ti, j-1 más el tiempo de duración Di,j-1 y el tiempo de inicio Ti-1, j más el tiempo de duración Di-1,j, tal como se muestra en la figura 6

Paso 3. Sumar las esquinas inferiores situadas hacia la derecha de la matriz de inicio y de tiempos. De acuerdo como se muestra en la figura 7.
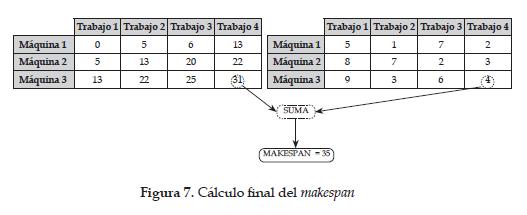
El makespan del ejercicio para la matriz y secuencia dada es: makespan = 31 + 4 = 35.
4.2. Estructura de vecindad
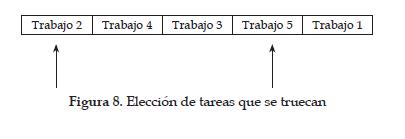
La estructura de vecindad para cualquier algoritmo es muy importante; incluso, se puede asegurar que es la clave de un buen desarrollo. Aquí la estructura de vecindad es la misma empleada para los 11 métodos estudiados. Luego de analizar el problema de secuenciación de tareas y las posibles estructuras de vecindad estudiadas, se logra identificar que los mejores resultados alcanzados se encuentran utilizando troca (swap) y corrimiento de tareas.
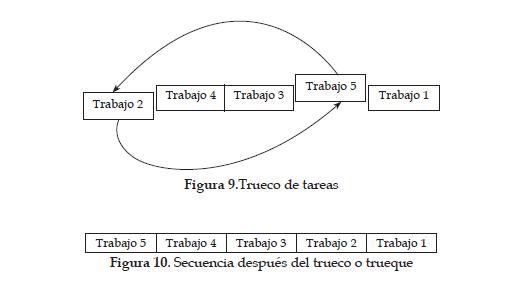
La troca o swap consiste en seleccionar dos tareas cualesquiera de la secuencia figura 8; e intercambiarlas entre sí, ver figura 9 para obtener un nueva secuencia ver figura 10.

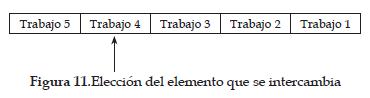
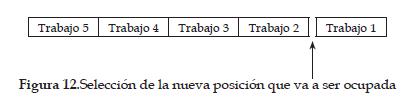
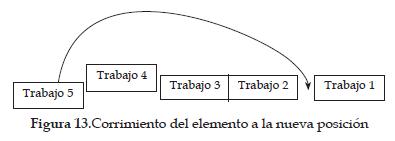
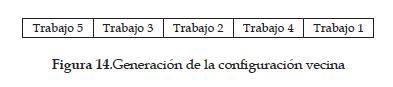
El corrimiento consiste en seleccionar una tarea al azar de la secuencia, ver figura 11; escoger una nueva posición aleatoria para la tarea asignada, ver figura 12; y llevar la tarea escogida a la nueva posición dada, ver figura 13, obteniendo una nueva secuencia vecina a la anterior, ver figura 14.
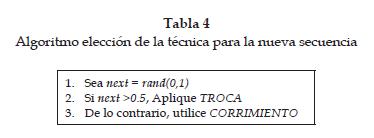
En este trabajo se definió una estructura de vecindad basada en los pro cesos de intensificación y diversificación de la búsqueda local, creando un método que combina las técnicas anteriormente nombradas sin dar prioridad a alguno de los dos procesos. Se integra una variable aleatoria con distribución normal centrada en 0.5, next, Si next es mayor que 0.5, la elección será la troca, de lo contrario el corrimiento. El algoritmo utilizado se describe en la tabla 4.
5. ESTUDIO COMPUTACIONAL
En esta sección se describen los resultados del análisis computacional, se compara la complejidad de los algoritmos y se detalla la implementación.
5.1. Selección de la muestra
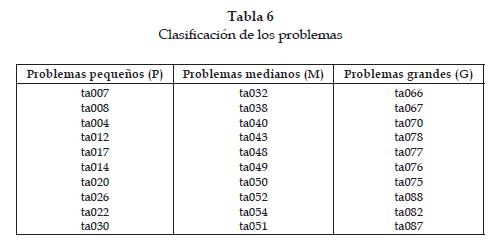
Se seleccionaron 30 problemas del Flow-Shop de la librería de Éric Taillard del sitio web [8]. El tamaño de los problemas tiene un rango que va desde 20 trabajos y 5 máquinas hasta 100 trabajos y 20 máquinas, que ha sido usado en estudios computacionales anteriores. Los problemas elegidos aleatoriamente se presentan en la tabla 5 y fueron clasificados de acuerdo al tamaño; esta clasificación se presenta en la tabla 6.
5.2. Comparación de complejidad
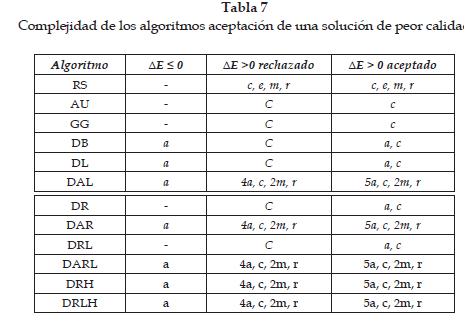
Cuando el ΔE < 0, el esfuerzo computacional requerido para todos los métodos es semejante, al contrario de ΔE > 0. Se puede notar que existen diferencias entre los esfuerzos realizados por cada técnica, esto teniendo en cuenta que las asignaciones similares para todas las técnicas no son tomadas para el estudio. Las comparaciones se muestran en la tabla 7 y las operaciones son clasificadas así a (suma y resta), c (comparación y asignación), m (multiplicación y división), e (exponenciación) y r (generar un número aleatorio).
La operación de recocido requiere de una multiplicación para planes exponenciales negativos o una resta para planes lineales, mientras que la operación de limitante sólo requiere de una comparación y una asignación.
5.3. Detalles de la implementación
Cada algoritmo fue escrito en MATLAB ® 7.0 y todo el trabajo computacional se realizó en una máquina con unas especificaciones cercanas a una CPU Pentium(R) 3,0 GHz y 504 MB de RAM.
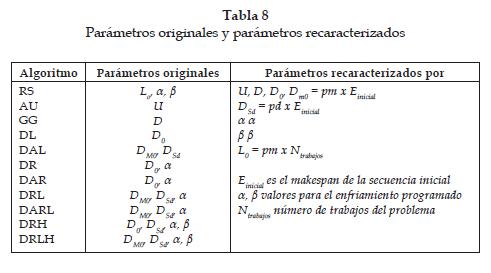
Como se recomienda en la literatura, se determinó una única variable de parámetro a los once algoritmos, que fuera capaz de arrojar resultados satisfactorios para todos los problemas de estudio. La idea central era encontrar un parámetro que fuera lo suficiente fuerte para resolver cada instancia del problema y así a la vez probar la robustez del método. A fin de obtener unos valores eficientes que sirvieran en este estudio se recaracterizaron los parámetros; tanto los originales como los recaracterizados son dados en la tabla 8. Estas caracterizaciones son un intento de estandarizar los parámetros de los 11 algoritmos en el problema de secuenciaciónde tareas.
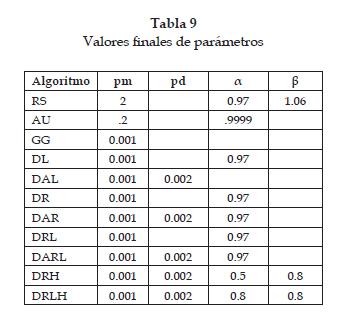
Para encontrar los valores de los parámetros, se escogieron 3 problemas de diferente tamaño; se crearon parámetros para cada uno; se recombinaron, y se seleccionó uno de ellos a fin de obtener un parámetro que entregara resultados de buena calidad. Los valores de los parámetros resultantes de los experimentos computacionales de la recombinación son presentados en la tabla 9.
Cada algoritmo fue ejecutado 20 veces para todos los 30 problemas, usándose los parámetros encontrados con la recombinación realizada experimentalmente. Como la secuencia inicial fue dada mediante una función aleatoria, todas las corridas de cada algoritmo tienen una semilla diferente. La solución entregada por cada ejecución fue medida con relación a la solución óptima y se compararon los resultados entre los 11 algoritmos.
4.4. Resultados computacionales
En esta sección se presenta la discusión de los resultados obtenidos al ejecutar los 11 algoritmos implementados para los problemas de Eric Taillard tomados de la referencia [8] de la cual se tomaron 30 problemas en forma aleatoria, que fueron resueltos 20 veces para cada uno de los algoritmos propuestos. Los parámetros usados son presentados en la tabla 9. Estos son el resultado de un parámetro único y que será usado en todos los problemas y con todos los algoritmos. Para su cálculo fue necesario llevar a cabo un estudio inicial que involucrara todas las técnicas y los problemas.
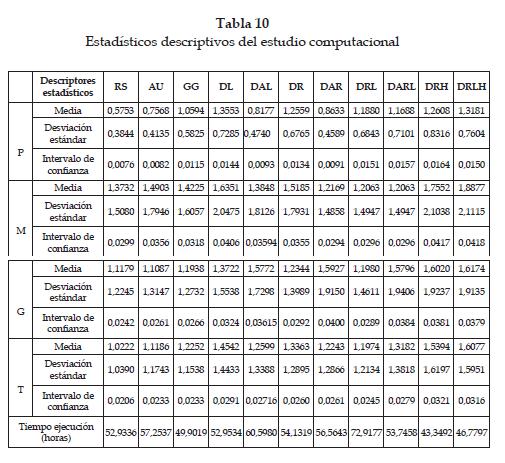
Los resultados obtenidos se presentan en la tabla 10. El análisis se realiza por grupos teniendo en cuenta: media, desviación estándar e intervalo de confianza. Adicionalmente se calcula la media total a fin de observar el desempeño global del algoritmo, mediante la expresión:

En la tabla 10 se presentan los errores muestrales de las instancias para cada algoritmo, la desviación estándar y el intervalo de confianza a un 95%, además del tiempo total de ejecución.
El error muestral es la desviación de la respuesta obtenida con respecto al óptimo. Los mejores resultados observados son los siguientes:
P el algoritmo con mayor precisión se observa en el RS. M en esta categoría se presenta un empate entre los algoritmos DRL y DARL. G el algoritmo con mayor precisión se observa en el AU.
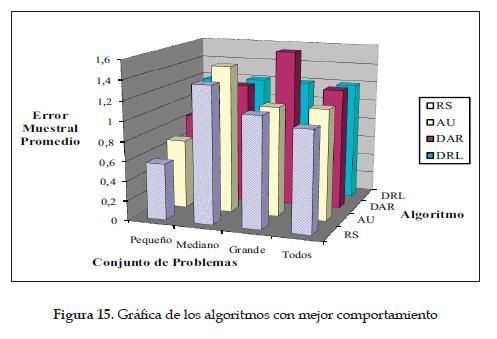
El algoritmo con mejor comportamiento en el contexto global (T) es el RS porque presenta el menor error y la menor desviación estándar.
En la figura 15 se presentan los resultados de los algoritmos con mejor calidad de respuesta y mejores tiempos de ejecución.
6. CONCLUSIONES Y RECOMENDACIONES
Se ha resuelto el problema de secuenciación de tareas (Flow-Shop) usando 11 versiones basadas en recocidos y clasificadas en recocido simulado, recocido determínistico y algoritmo demons, con los que se obtienen resultados de gran interés académico.
En este estudio se obtuvieron en algunos de los casos de prueba respuestas de mejor calidad a las reportadas en la referencia [8].
En la literatura especializada solo se encuentran implementaciones al FlowShop usando la técnica del recocido simulado; por lo tanto, la inclusión de las otras 10 técnicas es un aporte para la solución de este problema.
Fueron implementadas, además del Simulated Annealing, 10 versiones de algoritmos basadas en annealing, en las cuales se busca determinar el número de parámetros que mejor comportamiento presenten en los algoritmos. Así, por ejemplo, con el algoritmo AU se requiere de un solo parámetro de calibración y se obtienen resultados similares al algoritmo del RS. En este sentido el AU podría facilitarles a las personas con poca experiencia la solución de este problema de forma adecuada.
En trabajos futuros se podría intentar aplicar la metodología propuesta al problema de Job-Shop donde el secuenciamiento de tareas es diferente para cada producto.
Se propone, además, llevar a cabo la implementación del problema usando la optimización multiobjetivo, que presenta entre los objetivos sugeridos: tiempo de flujo, tardanza media, makespan.
BIBLIOGRAFÍA
[1] R. Gallego, A. Escobar and E. Toro, Técnicas metaheurísticas de optimización, 2nd Ed., Pereira: Universidad Tecnológica de Pereira, 2008. [ Links ]
[2] S. Kirkpatrick, C. Gelatt, and M. Vecchi, "Optimization by simulated annealing", Science, vol. 220, pp. 671-680, 1983. [ Links ]
[3] G. Dueck, "new optimization heuristics: The great deluge algorithm and the recordÂtoÂrecord travel," J. Computat. Phys., vol. 104, pp. 86-92, 1993. [ Links ]
[4] G. Dueck and T. Scheuer, "Threshold accepting: A general purpose optimization algorithm appearing superior to simulated annealing," J. Computat. Phys., vol. 90, pp. 161-175, 1990. [ Links ]
[5] I. Wood and T. Downs, "Fast optimization by demon algorithms," in ACNN í98; 9th Australian Conf. Neural Networks, 1998. [ Links ]
[6] --- "Demon algorithms and their application to optimization problems," in IEEE World Congr. Computational Intelligence, pp. 1661-1666, 1998. [ Links ]
[7] J. Pepper, B. Golden and E. Wasil, "Solving the Traveling Salesman Problem with Annealing-Based Heuristics: A Computational Study," IEEE Trans. Syst., Man, Cybern. A, vol. 32, pp. 72-77, 2002. [ Links ]
[8] É. Taillard, "Sheduling instances", mistic.heig-vd.ch. [Online]. Available: http:// ina2.eivd.ch/Collaborateurs/etd/problemes.dir/ordonnancement.dir/ ordonnancement.html. [Accessed: Feb. 26, 2009]. [ Links ]

