










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería y Desarrollo
Print version ISSN 0122-3461On-line version ISSN 2145-9371
Ing. Desarro. no.28 Barranquilla July/Dec. 2010
ARTÍCULO CIENTÍFICO / RESEARCH ARTICLE
Detección de daños en estructuras
utilizando la técnica de optimización PSO
Structural damage detection using PSO
optimization technique
Diego Ramírez* 1, Iván Darío Gómez** 2, Jabid Quiroga Méndez*** 2
1 The University of Oklahoma (Estados Unidos)
2 Universidad Industrial de Santander (Colombia)
* Candidato M. Sc. en Ingeniería Mecánica, The University of oklahoma (Estados Unidos). diegoramirez1987@gmail.com
** M. Sc. en Ingeniería Civil, Universidad Industrial de Santander, Bucaramanga (Colombia). Profesor auxiliar Escuela de Ingeniería Civil, Universidad Industrial de Santander. igomez19@hotmail.com
*** M. Sc. en Ingeniería Mecánica, Florida State University. Profesor asociado Escuela de Ingeniería Mecánica Universidad Industrial de Santander, Bucaramanga (Colombia) jabib@uis.edu.co
Correspondencia: Universidad Industrial de Santander. Escuela de Ingeniería Mecánica, Ciudad Universitaria, cra. 27 calle 9, 6325272, Bucaramanga, Santander.
Fecha de recepción: 17 de junio de 2010
Fecha de aceptación: 8 de octubre de 2010
Resumen
El presente artículo propone el uso de la técnica de optimización PSO en la detección de daños en estructuras. La afectación de la estructura se realiza a través del cambio del módulo de elasticidad en un modelo de elementos finitos. Este cambio altera las frecuencias naturales y modos de vibración de la estructura, lo cual se constituye en el indicador de falla de esta propuesta. Datos incompletos y con ruido son utilizados para simular las condiciones reales a una estructura tipo viga y armadura en diferentes escenarios de daño. Los resultados mostraron un buen desempeño de la técnica propuesta en los casos estudiados, lo que permite candidatizarla a esquema de monitoreo de estructuras civiles.
Palabras clave: detección de daños en estructuras, elementos finitos, PSO.
Abstract
This paper presents a structural damage detection system. Variations in elasticity module are used as a damage condition in a structural finite element model. This deviation alters vibration natural frequencies and shape modes; which is the fault indicator in this proposal. Noise and incomplete data are used to emulate real conditions in a beam and truss in different fault scenarios. Simulations show satisfactory performance in all cases studied. Therefore, this system can be used as suitable structural damage detection system.
Keywords: Damage detection, finite elements, PSO.
1. INTRODUCCIÓN
Las estructuras civiles son sistemas susceptibles al deterioro por uso, envejecimiento, sobrecargas, fatiga o el acontecimiento de un evento sísmico o explosivo. Por lo tanto, la evaluación continua de su estado a través de un sistema de detección de fallas es una tarea imprescindible. Los sistemas de detección de fallas permiten tomar decisiones sobre las necesidades de reforzar o reparar las estructuras reduciendo al mínimo la posibilidad de daños mayores y protegiendo tanto la integridad de la estructura como la de sus posibles usuarios.
Las principales técnicas para la detección de fallas no destructivas en estructuras civiles van desde la inspección visual, pasan por métodos como el uso de la acústica, el ultra sonido, los campos magnéticos, los rayos-X hasta emplear incluso métodos térmicos. Estas técnicas realizan una detección de daño local y funcionan satisfactoriamente si el daño está localizado dentro de una región accesible de la estructura [1].
Debido a las limitaciones de las anteriores metodologías el desarrollo de técnicas de inspección se ha orientado hacia la formulación de procedimientos analíticos de mayor confiabilidad y versatilidad. Se han implementado procedimientos analíticos entre los que sobresalen aquellos con base en la respuesta dinámica de la estructura [2]-[4]. Algunas de las principales ventajas de utilizar la respuesta dinámica como esquema de monitoreo son: no es imprescindible conocer a priori los lugares damnificados; es posible determinar remotamente el comportamiento global de la estructura a partir de un número limitado de sensores y con suficiente información; permite localizar y cuantificar el daño [1],[5].
En este trabajo se implementa una técnica de detección de fallas en estructuras a través del análisis de las características que esta da como respuesta dinámica. Se utiliza como indicador de falla la disminución del módulo de elasticidad en uno o varios elementos de la estructura. El valor del cambio del módulo de elasticidad se obtiene a través del planteamiento de un problema inverso utilizando PSO, en el que a partir de la respuesta dinámica de la estructura se establecen los módulos de elasticidad de los elementos que reproducen las mismas características dinámicas.
2. MARCO TEÓRICO Y METODOLOGÍA
El monitoreo de estructuras basándose en las características dinámicas utiliza variables como la energía de deformación modal, variaciones de formas modales y/o frecuencias naturales, vectores de fuerza residual y variaciones en la matriz de flexibilidad de la estructura [6]. Los sistemas de detección de fallas en función de modelos comparan algunas de las anteriores variables dinámicas con un valor de referencia que corresponde al valor de la variable en condición normal, y a partir de esta diferencia se produce un residuo o indicador de falla con el cual se realiza el diagnóstico.
Respuesta dinámica de estructuras
La respuesta dinámica de una estructura de múltiples grados de libertad se determina usando (1):

donde M, C y K son las matrices de masa, amortiguamiento y rigidez de orden n x n, respectivamente, con componentes mik, cik y kik que representan las fuerzas generalizadas para cada coordenada i, cuando la aceleración es aplicada en una coordenada k. p(t) es un vector de excitación y q(t) es el vector de desplazamiento del sistema. Una alternativa para solucionar (1) es la aproximación modal, que se asume el sistema no amortiguado (2) y cuya i-esima solución está dada por (3)
donde  es la i-forma del modo (vector propio) con una correspondiente frecuencia natural circular wi (valor propio) y ángulo de fase αi. Substituyendo (3) en (2), y eliminando sen(wit-ai) se obtiene (4)
es la i-forma del modo (vector propio) con una correspondiente frecuencia natural circular wi (valor propio) y ángulo de fase αi. Substituyendo (3) en (2), y eliminando sen(wit-ai) se obtiene (4)
La solución de (4) corresponde a la determinación de los valores y vectores propios del sistema, que se normalizan a través de la matriz de masa (5), donde  es la forma modal normalizada.
es la forma modal normalizada.

Función objetivo
El sustento de todo sistema de monitoreo es el indicador de falla. En este trabajo el indicador de falla, que es el cambio en el módulo de elasticidad [7,8], se obtiene de un proceso de optimización al comparar las características dinámicas experimentales con las de un modelo analítico de la estructura monitoreada. Las funciones objetivo a optimizar (6) propuesta por [9] y (7) por [10] buscan minimizar la diferencia entre el comportamiento experimental y el de referencia, variando el módulo de elasticidad. El proceso de optimización permite determinar los módulos de elasticidad asociados a cada elemento de la estructura y su comparación con los valores iniciales permite la determinación de la condición normal o de falla en la estructura.
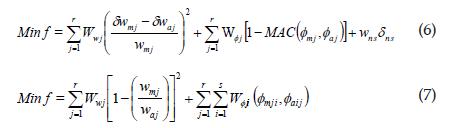
En (6-7) el subíndice m corresponde a los datos que fueron medidos o simulados y el subíndice a corresponde a los obtenidos a partir del modelo analítico; dw son las variaciones en las frecuencias naturales; wj y fj corresponden a la j-ésima frecuencia natural y forma modal, respectivamente. Los términos W son factores de peso para cada una de las características dinámicas; dns asume un valor de cero si tiene un lugar damnificado y un valor de uno si tiene más que un lugar damnificado; r es el número de formas modales utilizadas para la comparación y s es el número de componentes del vector de la j-ésima forma modal (número de grados de libertad). El término MAC, sigla de Modal Assurance Criterion, traduce criterio de confianza nodal y permite estimar el grado de correlación entre los modos de vibración (8).

donde  es el vector propio del modo i que contiene solo los grados de libertad medidos y
es el vector propio del modo i que contiene solo los grados de libertad medidos y  es el correspondiente al valor experimental del vector propio del modo j. Finalmente, se puede observar que las funciones objetivo utilizadas en esta investigación utilizan como parámetros de indicación del daño la frecuencia natural y los modos de vibración, de manera simultánea.
es el correspondiente al valor experimental del vector propio del modo j. Finalmente, se puede observar que las funciones objetivo utilizadas en esta investigación utilizan como parámetros de indicación del daño la frecuencia natural y los modos de vibración, de manera simultánea.
Técnica de optimización PSO
En la implementación de un proceso de optimización pueden ser utilizadas técnicas convencionales de optimización o las denominadas metaheurísticas. Las primeras presentan una alta dependencia del punto de partida y podrían ser ineficientes en espacios de búsqueda altamente complejos. Por otro lado, las técnicas metaheurísticas se han convertido en herramientas importantes para la solución de problemas altamente no lineales como aquellos que presentan múltiples óptimos locales. Entre las principales metaheurísticas utilizadas en detección de daños se encuentran Simulated Annealing; Particle Swarm Optimización (PSO), y Algoritmos Genéticos (AG) [6].
En este trabajo la función objetivo es minimizada utilizando PSO, que se clasifica como un algoritmo estocástico de optimización basándose en población, y se inspira en el comportamiento social de algunos animales. El algoritmo PSO permite explorar el espacio de la solución en múltiples direcciones, simultáneamente, evitando los mínimos locales.
En su operación al igual que en la naturaleza si un miembro (solución planteada al problema) detecta un camino deseable para desplazarse (buena solución), el resto de la colonia (otras posibles soluciones) redirecciona la búsqueda a través de una ponderación entre la dirección indicada por el miembro y lo indicado por la colonia. En PSO, este comportamiento animal es imitado por partículas con ciertas posiciones y velocidades en un espacio de búsqueda. La población inicial se determina aleatoriamente, cada partícula se desplaza a través de dicho espacio de búsqueda y recuerda la mejor posición que ha encontrado. Cada partícula comunica las buenas posiciones a las demás y dinámicamente ajusta su propia posición y su velocidad con base en las buenas posiciones. La velocidad se ajusta con el comportamiento histórico de las partículas. Este procedimiento de búsqueda se describe con las ecuaciones (9-10).

En (9) c1 y c2 son constantes positivas definidas como coeficientes de aceleración; w es el factor inercial; rand1 y rand2 son dos números aleatorios (con distribución de probabilidad uniforme) en el rango [0,1]; xi representa la iésima partícula y pbest1, la mejor posición previa de xi; gbest es la posición de la mejor partícula de toda la población, y vi es la razón de cambio de la posición (velocidad) de la partícula xi. Los cambios de velocidad en (9) se componen de tres partes: momentum, cognitiva y social. De esta forma se obtiene una velocidad que tiende a acercar la partícula a pbest y gbest.
Implementación de la metodología
La respuesta dinámica de la estructura, frecuencias y formas modales se determina usando el software de libre distribución OPENSEES®. El problema de la detección de fallas propuesto en este estudio se implementa bajo las siguientes consideraciones:
-
Se considerarán variaciones entre 0-40% del módulo de elasticidad.
-
Se asume que la respuesta de la estructura se encuentra en un régimen lineal.
-
La estructura se considera sin amortiguamiento.
Para el estudio de la condición en falla, el daño a la estructura es emulado disminuyendo el valor del módulo de elasticidad a uno o varios elementos de la estructura a través de un algoritmo de MATLAB®. Esta nueva versión de la estructura se introduce a OPENSEES, el cual determina las características dinámicas. Estas características serán utilizadas, entonces, para realizar el procedimiento inverso, es decir, a partir de ellas será determinada la rigidez (módulos de elasticidad) de cada elemento usando el algoritmo de optimización PSO, a la que se compara con la original, y a partir de este residuo se diagnostica la estructura.
La selección de los parámetros asociados al algoritmo PSO tiene un impacto significativo en el desempeño del algoritmo. En este caso específico los parámetros relevantes utilizados en la implementación del algoritmo PSO que se obtuvieron después de un proceso exhaustivo de experimentación son: máxima velocidad de las partículas 0,4; máximo número de épocas del ciclo 1500; tamaño de la población 60; influencia del mejor valor pbest 10; influencia del mejor valor Gbest 10; peso inicial de inercia 0,9; peso final de inercia 0,4; mínimo gradiente de error global 1e-5, y épocas antes de que el criterio del error del gradiente termine de correr 50.
La evaluación del desempeño del esquema de detección propuesto se realiza en distintos escenarios en los cuales se varía: tipo de daño, daño simple (un solo elemento) y daños múltiples (más de un elemento); la función objetivo utilizada; presencia de ruido en las mediciones y cantidad de modos de vibración.
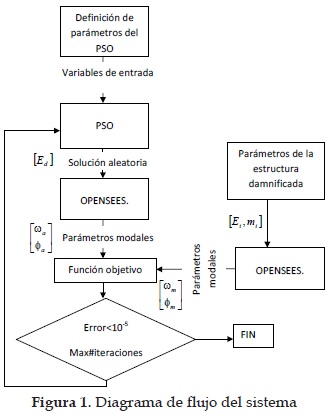
La metodología consiste en: 1) Establecer daños a la estructura a partir de la reducción de los módulos de la elasticidad de los elementos, y evaluar las frecuencias y formas modales de la estructura damnificada  Establecer de forma aleatoria los módulos de elasticidad de los elementos y determinar las características dinámicas para las diferentes soluciones de módulos de elasticidad usando OPENSEES
Establecer de forma aleatoria los módulos de elasticidad de los elementos y determinar las características dinámicas para las diferentes soluciones de módulos de elasticidad usando OPENSEES  . Estas características dinámicas son comparadas con las características de la estructura damnificada por medio de la función objetivo. Luego, los valores de la función objetivo son devueltos al algoritmo de PSO para que produzca nuevas soluciones. 3) El paso 2 se repite iterativamente hasta que se cumpla un error mínimo considerado en la función objetivo o se alcance un máximo de iteraciones. El diagrama de flujo del esquema de la técnica implementada se muestra en la figura 1.
. Estas características dinámicas son comparadas con las características de la estructura damnificada por medio de la función objetivo. Luego, los valores de la función objetivo son devueltos al algoritmo de PSO para que produzca nuevas soluciones. 3) El paso 2 se repite iterativamente hasta que se cumpla un error mínimo considerado en la función objetivo o se alcance un máximo de iteraciones. El diagrama de flujo del esquema de la técnica implementada se muestra en la figura 1.
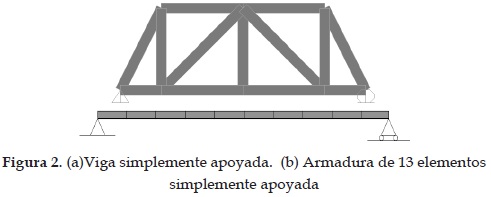
El esquema de detección de fallas implementado se aplica a dos tipos de sistemas estructurales planos: una viga y una armadura (ver figura 2). La viga está simplemente apoyada y es discretizada en 10 elementos, cada uno de los cuales es considerado uniforme y con un módulo de elasticidad inicial e igual al valor asumido como condición normal. Los demás parámetros como área, momento de inercia y densidad se consideran sin cambio. Para el análisis de daño solo se han considerado los grados de libertad verticales en los modos de vibración. En cuanto a la armadura, que se compone de 13 elementos, es simplemente apoyada, y los elementos horizontales están uniformemente espaciados. Al igual que en la viga solo el módulo de elasticidad de los distintos elementos se considera variable y su cambio representa la condición de falla.
La presencia de ruido en las mediciones se considera mediante la introducción de pequeñas perturbaciones en frecuencias naturales y formas modales usando (11-12)
donde  corresponden a las frecuencias naturales y formas modales sin presencia de ruido, respectivamente,
corresponden a las frecuencias naturales y formas modales sin presencia de ruido, respectivamente,  son los valores de los mismos parámetros con ruido.
son los valores de los mismos parámetros con ruido.  son los porcentajes de ruido introducidos. Las frecuencias naturales y formas modales son contaminadas por ruido con un error promedio de ±0.15% y ±3%, respectivamente [11].
son los porcentajes de ruido introducidos. Las frecuencias naturales y formas modales son contaminadas por ruido con un error promedio de ±0.15% y ±3%, respectivamente [11].
3. RESULTADOS
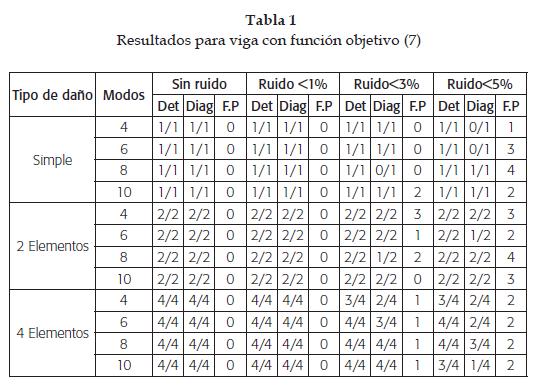
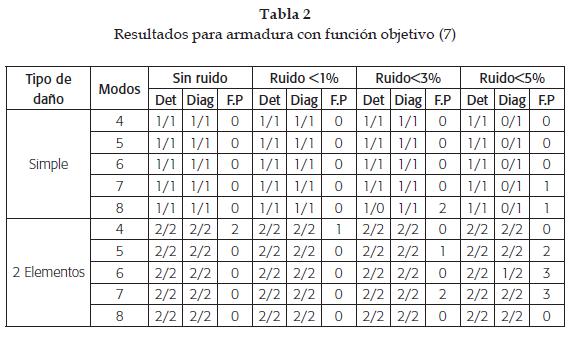
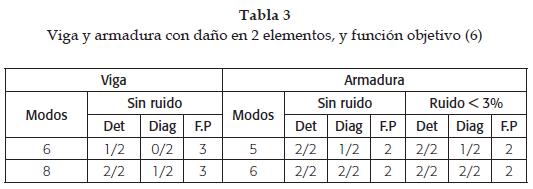
Diversos escenarios de daño para ambas estructuras analizadas son considerados para la evaluación del desempeño de las metodologías estudiadas. Por motivos de espacio solo algunos de ellos se muestran en las tablas I-III, en donde se distinguen la detección (Det) como la ubicación del elemento damnificado y diagnóstico (Diag) como la determinación acertada con una desviación hasta del 5% del valor del cambio del módulo de elasticidad del elemento detectado. Así mismo se listan los falsos positivos (F.P) como aquellos casos en los que la metodología registró cambio en la rigidez aun cuando esta realmente no existía.
Pruebas realizadas demuestran que la función objetivo (7) presenta mejores resultados para los dos sistemas utilizados. Por lo tanto, la información que se muestra más extensamente corresponde a esta función objetivo. Aunque no se muestra, la función objetivo (6) solo se desempeñó satisfactoriamente en la viga en el escenario de daño simple y cuando era discreta, al menos con 7 elementos; en la tabla III se muestra el desempeño de esta función objetivo en daño múltiple con la presencia de un número significativo de falsos positivos.
A partir de la información mostrada en las tablas I-III se aprecia que la metodología propuesta detecta y diagnostica los elementos afectados en ausencia de ruido a todos los escenarios de daño para ambos sistemas. La presencia de ruido afecta el desempeño en diagnóstico y falsos positivos, por lo cual es más significativo su impacto en la viga. Adicionalmente, aunque no se muestra, se encontró que la magnitud del daño afecta la detección; en general el desempeño satisfactorio se da para daños superiores al 10%. Para ambos sistemas la variación del número de modos no afectó considerablemente el desempeño del sistema propuesto.
En cuanto al tiempo de ejecución y número de épocas para la convergencia de PSO con la función objetivo (7) se encuentra que tanto en la viga como en la armadura a mayor número de elementos afectados, ligeramente mayor será el tiempo en la determinación de la condición del sistema. En cuanto al número de épocas en la armadura cuanto mayor es el número de elementos en falla, se presenta un considerable aumento del número de épocas. El efecto de la presencia de ruido incidió notablemente en el número de épocas y tiempo de ejecución.
4. CONCLUSIONES
Una viga y una armadura bajo diversos escenarios de daño fueron estudiadas con la metodología propuesta. Los resultados experimentales mostraron la eficacia y robustez del sistema propuesto en cuanto identifica consistentemente la condición de falla en el sistema. Las pruebas muestran que utilizando mediciones experimentales con ruidos menores al 5%, la metodología detecta confiablemente los elementos damnificados. Mayores niveles de ruido afectan significativamente el desempeño de esta metodología. Se encontró que la función objetivo (7) mostró mejor desempeño en todos los casos analizados. Los tiempos de procesamiento dependen del tipo de estructura analizada y de la posición inicial de las partículas. En la medida en que el número de elementos aumenta, el tiempo de procesamiento se puede tornar prohibitivo por las metodologías.
Referencias
[1] S. Doebling, C. Farrar and M. Prime, "A Summary Review of Vibration-Based Damage Identification Methods", The Shock and Vibration Digest, vol. 30, n.° 2, pp. 91-105, 1998. [ Links ]
[2] W.X. Ren and G. DE Roeck, "Structural Damage Identification using Modal Data. I: Simulation Verification", Journal of Structural Engineering, vol. 128, n.°1, pp. 87- 95, Jun. 2002. [ Links ]
[3] L. Faravelli and S. Casciati, "Structural damage detection and localization by response change diagnosis", Progress in Structural Engineering and Materials, vol. 6, n.° 2, pp. 104-115, Jun. 2004. [ Links ]
[4] A. Rahai, F. Bakhtiari-Nejad and A. Esfandiari, "Damage assessment of structure using incomplete measured mode shapes", Structural Control and Health Monitoring, vol. 14, n.° 5, pp. 808-829, Oct. 2006. [ Links ]
[5] J. Humar, A. Bagchi and H. XU, "Performance of Vibration-based Techniques for the Identification of Structural Damage", Structural Health Monitoring, vol. 5, no. 3, pp. 215-227, 2006. [ Links ]
[6] J.D. Villalba Morales, "Deteccao de Dano em Estruturas Utilizando Algoritmos Geneticos e Parametros Dinamicos", MSc thesis, Universidade de Sao Paulo, Sao Carlos, Brazil, 2009. [ Links ]
[7] H. Tang, S. Xue, R. Chen and Y. Wang, "Analyses on structural damage identification based on combined parameters", Applied Mathematics and Mechanics, vol. 26, n.° 1, pp. Jan. 2005. [ Links ]
[8] J. Villalba and J. Laier, "Detección de daño estructural por algoritmos genéticos: una comparación de diferentes tipos de codificación de indivíduos", Ingeniería y Desarrollo, n.° 27, pp. 170-186, 2010. [ Links ]
[9] M. Friswell, J.Penny and S. Garvey, "A combined genetic eigensensitivity algorithm for the location of damage in structures", Computers and Structures, vol. 69, pp. 547-556, 1998. [ Links ]
[10] K. Moslem and R. Nafaspour, "Structural Damage detection by genetic algorithms", AIAA Journal, vol. 40, n.° 7, pp. 1395-1401, 2002. [ Links ]
[11] B. Chen and S. Nagarajaiah, "Flexibility-based structural damage identification using Gauss-Newton method", Proc. of SPIE, vol. 6529, 2007. [ Links ]

