










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Desarrollo
versão impressa ISSN 0122-3461versão On-line ISSN 2145-9371
Ing. Desarro. v.29 n.2 Barranquilla jul./dez. 2011
Evaluación del desempeño de diversos controladores
avanzados aplicados a un robot manipulador tipo scara
Evaluation of performance of some control strategies
applied to a scara robot manipulator
Elena Muñoz*
Víctor Hugo Mosquera**
Carlos Alberto Gaviria***
Oscar Andrés Vivas**** Universidad del Cauca (Colombia)
* Profesora asociada de la Universidad del Cauca, Popayán (Colombia). Magíster en Electrónica y Telecomunicaciones, Universidad del Cauca. elenam@unicauca.edu.co
** Profesor titular de la Universidad del Cauca, Popayán (Colombia). Magíster en Electrónica y Telecomunicaciones, Universidad del Cau-ca.mosquera@unicauca.edu.co.
*** Profesor titular de la Universidad del Cauca, Popayán (Colombia). Ph.D., Universidad Politécnica de Cataluña (España). cgaviaria@unicauca.edu.co.
**** Profesor titular de la Universidad del Cauca, Popayán (Colombia). Ph.D., Université de Montpellier II (Francia). avivas@unicauca.edu.co. Correspondencia: Elena Muñoz. Calle 5 n° 4-70, Popayán (Colombia). Tel: +57 (2) 8209800, ext. 2118.
Fecha de recepción: 28 de abril de 2011
Fecha de aceptación: 13 de septiembre de 2011
Resumen
Este artículo presenta una evaluación del desempeño de varios controladores avanzados aplicados al control cartesiano de un robot manipulador de cuatro grados de libertad, tipo SCARA. Inicialmente se expresa el modelo dinámico del robot, para posteriormente implementar en simulación diversos tipos de controladores. Algunas simulaciones no están basadas en modelos como el PID; otras, en cambio, se basan en modelos como el control por par calculado, el control robusto, el control predictivo, el control PID multivariable y el control por modos deslizantes. Se realiza una evaluación del desempeño de estos controladores probando diversas trayectorias cartesianas de tipo industrial, así como sus respuestas ante perturbaciones y ante cambios en los valores de los parámetros dinámicos.
Palabras clave: Control de robots, control PID, control por modos deslizantes, control por par calculado, control predictivo, control robusto.
Abstract
This article presents an evaluation of performance of several advanced controllers applied to the operational control of four degrees of freedom SCARA robot. First the dynamic model of the robot is presented. Then, several controllers are designed, beginning by classical PID controller that is not based on a mathematical model. Then, model based control approaches are analyzed, like the computed torque control, robust and predictive control, multivariable PID, and sliding control. Several operational industrial trajectories are tested, as soon as the robustness with respect to external disturbances or model robot mismatch.
Keywords: Control of robots, PID control, sliding control, computed torque control, predictive control, robust control.
1. INTRODUCCIÓN
En los últimos años se han utilizado muchas estrategias para el control de robots. Los robots industriales utilizan normalmente el control clásico tipo PID; pero los brazos manipuladores, los cuales se componen de varias articulaciones unidas entre sí, poseen una dinámica altamente no lineal con un fuerte acoplamiento entre sus respectivas articulaciones. Esto complica la tarea de un simple controlador PID, así como su sintonización, sobre todo con consignas a altas velocidades o aceleraciones [1]. Mejores soluciones han sido propuestas utilizando controladores basados en el modelo del robot, los cuales, al hacer uso internamente del modelo matemático del mecanismo, logran compensar los términos dinámicos presentes.
En la robótica industrial, la estrategia de control más común, basada en el modelo matemático del manipulador, es el control por par calculado [1], [2], el cual es relativamente fácil de implementar y provee resultados satisfactorios en cuanto a errores de seguimiento y robustez. Pero las incertidumbres presentes debido a parámetros mal estimados o no modelados limitan la validez del modelo usado como base para el diseño del controlador y dificultan el diseño de un algoritmo eficaz basado en un modelo matemático exacto. Por esto se ha explorado otro tipo de soluciones con el fin de darle al sistema la robustez deseada. Entre las más importantes soluciones planteadas figuran el control robusto [3], [4], el control predictivo funcional [5], [6] y el control por modos deslizantes [7], [8].
Este artículo presenta un estudio comparativo de diversos controladores, basados o no en el modelo (PID, por par calculado, robusto, predictivo, por modos deslizantes), aplicados al control de un robot manipulador industrial tipo sCARA. Para evaluar el desempeño de estos controladores se utilizaron diversas trayectorias de tipo industrial y se realizaron, así mismo, pruebas de robustez. El objetivo es mostrar diversas alternativas para el control de manipuladores industriales diferentes del clásico control PID, que el medio industrial podría implementar en caso de que el PID no logre cumplir con los requerimientos exigidos en una trayectoria en particular. En Colombia, la gran mayoría de controladores para robots industriales utilizan el PID; este estudio pretende dar a conocer otras posibles soluciones que eventualmente podrían convenir al diseñador.
2. FORMULACIÓN DEL MODELO DINÁMICO DEL ROBOT
El modelo de un brazo robot rígido de n grados de libertad es regido por la ecuación (1) [1]:

Donde es el par aplicado; M(q) es la matriz de inercia, simétrica y definida positiva;  es la matriz que incluye las fuerzas de Coriolis y centrífugas; y G(q) es el vector de fuerzas gravitacionales. La posición articular está dada por q, la velocidad por y la aceleración por ¨
es la matriz que incluye las fuerzas de Coriolis y centrífugas; y G(q) es el vector de fuerzas gravitacionales. La posición articular está dada por q, la velocidad por y la aceleración por ¨
Los términos dinámicos de la ecuación (1) son altamente no lineales y además acoplados. En el enfoque del control por par calculado, el primer paso consiste en linealizar y desacoplar el modelo dinámico del robot mediante una ley de control linealizante. Dado que la matriz M(q) es cuadrada y de rango pleno, puede ser invertida para cualquier configuración, y por tanto la siguiente definición lleva al sistema lineal dado por la ecuación (2):

Donde u es la nueva ley de control linealizante y corresponde a un nuevo vector de control;  son las estimaciones de los respectivos términos del robot real. En ausencia de perturbaciones y cuando el modelo dinámico es perfectamente conocido,
son las estimaciones de los respectivos términos del robot real. En ausencia de perturbaciones y cuando el modelo dinámico es perfectamente conocido,  . En este caso, u tiene la forma de la aceleración articular de la ecuación (3):
. En este caso, u tiene la forma de la aceleración articular de la ecuación (3):

Esto equivale a un sistema desacoplado que se representa por un sistema lineal de segundo orden, lo cual significa que la dinámica no lineal y acoplada se reemplaza por un sistema de segundo orden lineal sin acoplamiento; sin embargo, la compensación puede no ser perfecta en presencia de incertidumbre o debido a las aproximaciones realizadas en el cálculo en línea del modelo dinámico inverso.
Descripción del robot SCARA
El robot SCARA es un brazo manipulador bastante utilizado en la industria. Posee cuatro grados de libertad, con tres articulaciones rotatorias y una prismática. Este robot es capaz de ubicar un objeto en un espacio de tres dimensiones, imprimiéndole además una rotación. El robot escogido para este estudio es el SCARA Kuka KR5 R350 [9].
La ecuación (1) contiene los parámetros dinámicos del manipulador (tensor de inercia, primer momento de inercia, masa de la articulación e inercia del actuador). Con el fin de aligerar el cálculo de las ecuaciones, los parámetros dinámicos pueden agruparse entre sí de acuerdo con consideraciones físicas [1], y se obtienen los valores nominales de los parámetros agrupados a partir de los datos técnicos dados por el fabricante [10]. Se definen unos pares máximos de ± 250 N.m para cada uno de los motores del robot.
3. ESTRATEGIAS DE CONTROL IMPLEMENTADAS Control PID
El controlador PID aplicado al robot SCARA ha sido definido en el espacio articular, donde las posiciones articulares deseadas son obtenidas a partir de las posiciones cartesianas deseadas utilizando el modelo geométrico inverso (MGI).
Control PID multivariable
El diseño del controlador PID multivariable está basado en los trabajos de [11]. Este esquema está compuesto por dos controladores: un controlador PD (K(s)), que se diseña mediante la técnica de asignación de polos utilizando un modelo linealizado alrededor de un punto de operación, y un controlador PID (Q(s)), que se diseña para lograr el desacople entrada-salida y el seguimiento de trayectorias.
La ecuación (1) se linealiza alrededor de un punto de operación (p) para pequeñas perturbaciones. El modelo linealizado se representa por la ecuación (4) [11]:

Donde las matrices A0, B0 y C0 están definidas por

Representando el modelo de la ecuación (4) en las variables de estado  , el par que se aplica al robot está dado por la ecuación (5):
, el par que se aplica al robot está dado por la ecuación (5):

Donde Kp y Kv son las matrices de realimentación de las ganancias constantes de posición y velocidad del control PD. Estas ganancias se pueden seleccionar por asignación de los 2n polos del sistema en la ecuación (5), que garantice la estabilidad del lazo interno y una adecuada respuesta transitoria. También se podría utilizar un regulador óptimo cuadrático (LQR) [12] para obtener resultados similares.
Colocando el sistema intermedio W(S) en cascada con el controlador Q(S) se diseña este para obtener una función de transferencia total desacoplada dada por la ecuación (6):

Donde K=diag(Ki) es una matriz definida positiva a fin de que el lazo externo sea estable, siendo k. las constantes por determinar. Definiendo  se obtiene la expresión del PID muLtivariable (ecuación (7):
se obtiene la expresión del PID muLtivariable (ecuación (7):

La definición dada para las matrices Qp, QI y Qv logra que se cumpla la ecuación (6), lo cual permite que la función de lazo W(s) Q(s) sea desacoplada. Esta respuesta de primer orden tiene la desventaja de ser más lenta de lo que podría llegar a ser el orden del sistema original, pero aporta una gran simplicidad de diseño, el cual pude verse en detalle en [13].
Control por par calculado
Después del control PID clásico, este tipo de estrategia es la más utilizada en la industria para el control de manipuladores. Al contener el modelo de la planta se logran normalmente desempeños superiores al del PID, bajo el supuesto, claro está, de conocer con relativa exactitud los parámetros dinámicos que caracterizan al robot. Teniendo en cuenta que el movimiento deseado se especifica con la posición qd, el control por par calculado [1], una vez linealizado y desacoplado el sistema, se calcula según la ecuación (8):

Donde Kp y Kv representan las ganancias de los controladores. La consigna deseada se define en el espacio operacional y se transforma en consigna articular por medio del modelo geométrico inverso (MGI).
Control backstepping con incertidumbre (CBI)
El problema del control de sistemas lineales y no lineales con incertidumbre paramétrica es un aspecto ampliamente investigado que ha generado diversos enfoques, como: esquemas  , esquemas robusto adaptivos, etc. [14]. Otro enfoque para afrontar este problema es el control backstepping, el cual provee un método eficiente de diseño de una ley de control que garantiza la estabilidad global del sistema con incertidumbre paramétrica [15], [16].
, esquemas robusto adaptivos, etc. [14]. Otro enfoque para afrontar este problema es el control backstepping, el cual provee un método eficiente de diseño de una ley de control que garantiza la estabilidad global del sistema con incertidumbre paramétrica [15], [16].
Backstepping es un procedimiento recursivo que combina la elección de una función de LyapuNov con el diseño de un control por realimentación. se descompone el problema original en una secuencia de problemas de diseño para sistemas de orden reducido (que hasta pueden llegar a ser escalares). Para el diseño de la ley de control backstepping se parte de la ecuación (1). Se asume incertidumbre en las matrices M y C ; de forma que Moy Co representan el modelo nominal del robot SCARA y  indican la incertidumbre (ecuaciones (9) y (10)):
indican la incertidumbre (ecuaciones (9) y (10)):


Sustituyendo (9) y (10) en (1) se obtiene la ecuación

Se definen losvectores de error de posiciónyvelocidadcomo  y
y  respectivamente. Siguiendo la metodología de Spong et al. [17], [18] se define el vector de corrección de velocidad como
respectivamente. Siguiendo la metodología de Spong et al. [17], [18] se define el vector de corrección de velocidad como 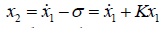 . Aplicando sencillos procedimientos aritméticos se obtiene la representación del modelo dinámico del SCARA (ecuaciones (12) y (13)):
. Aplicando sencillos procedimientos aritméticos se obtiene la representación del modelo dinámico del SCARA (ecuaciones (12) y (13)):

Finalmente, por medio del enfoque backstepping se selecciona la función de Lyapunov candidata para determinar la ley de control (14) que garantiza la estabilidad global del sistema, siendo K una matriz diagonal definida positiva:

Control predictivo
El control predictivo posee por sí solo varias estrategias, las cuales pretenden predecir el comportamiento futuro de la planta. En este estudio en particular se aplicará el control predictivo funcional (Predictive Functional Control, PFC), técnica desarrollada por Richalet [19], [20]. Dada una consigna deseada definida en el horizonte finito [0, h], la predicción de la salida futura " deberá alcanzar la consigna futura siguiendo una trayectoria de referencia yR. Es claro que el horizonte de control no debe ser muy pequeño, puesto que aumentará las exigencias del controlador, y no podrá ser muy grande, pues la respuesta del sistema sería demasiado lenta.
La trayectoria de referencia yR está definida por la ecuación (15):

Donde a es un escalar que se escoge según el tiempo de respuesta deseado en lazo cerrado.
La esencia de la estrategia de control predictivo está completamente incluida en la anterior ecuación. El objetivo es, pues, alcanzar la consigna deseada siguiendo la trayectoria de referencia. Esta trayectoria de referencia se considera como el comportamiento deseado en lazo cerrado y es lo que distingue el control predictivo funcional de las otras estrategias de control predictivo.
El algoritmo de control predictivo se implementa con la ayuda de un modelo interno compuesto de un doble integrador, el cual representa el sistema no lineal y sin acoplamiento. Mayores detalles pueden verse en [20].
Control por modos deslizantes terminal
El control por modos deslizantes terminal (Terminal Sliding Mode Control, TSMC) fue propuesto por [7], [21]. Es una variante del control por modos deslizantes, la cual introduce un término no lineal en la definición de la superficie de deslizamiento, alcanzando una convergencia del error en el modo de deslizamiento en un tiempo finito y menor que con la técnica convencional del control por modos deslizantes.
Para el diseño se considera el modelo dinámico de un robot manipulador con incertidumbre y disturbios limitados así:

Donde es el vector de disturbios externos al manipulador y F representa la incertidumbre del modelo.
El procedimiento de diseño que se sigue es similar al desarrollado para modos deslizantes convencional [13]. El error de posición se define como

Se impone entonces una condición de alcanzabilidad tipo Fast Terminal Sliding Mode (FTSM) [8], [22], dada por la ecuación (18):

La ley de control por modos deslizantes terminal con ley de alcanzabilidad tipo FTSM que garantiza estabilidad robusta de la dinámica del sistema y convergencia a cero del error, está dada por la ecuación (19) [8]:
4. RESULTADOS DE LAS DIFERENTES ESTRATEGIAS IMPLEMENTADAS
En esta sección se consideran diferentes situaciones con el fin de ilustrar el desempeño de cada controlador. Primero, se utilizan como consigna trayectorias complejas definidas en el espacio cartesiano; segundo, se muestran las respuestas a perturbaciones externas, con el fin de probar la robustez de los controladores; finalmente, a los controladores basados en el modelo matemático se les introducen variaciones en los valores de sus parámetros dinámicos para evaluar su robustez frente a estas variaciones. Las simulaciones tienen en cuenta la saturación de los actuadores del robot, agregando saturación del par en ±250 N.m para el Kuka KR5 R350.
Desempeño
Las siguientes trayectorias se definen en el espacio de trabajo o cartesiano del robot:

La figura 1 muestra el error cartesiano ante la consigna circular definida en (i):

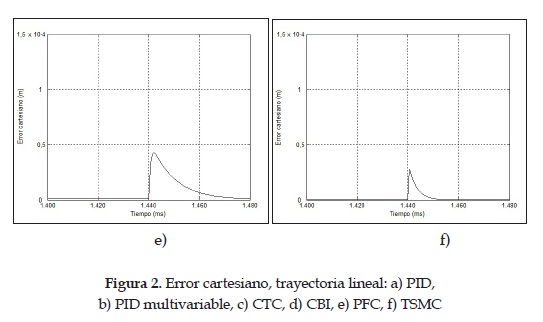
La figura 2 muestra el error cartesiano ante la consigna lineal definida en (ii):

Rechazo de perturbaciones
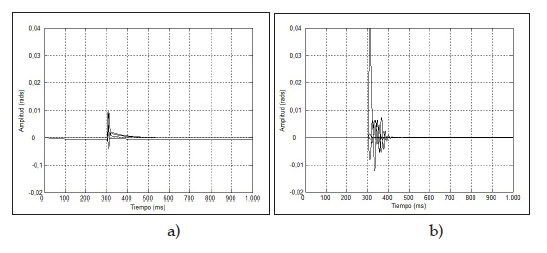
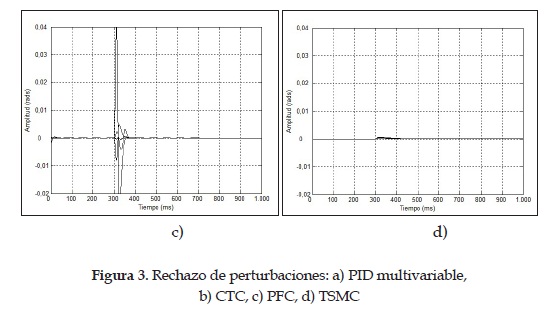
Se introduce una perturbación externa al sistema, definida como una variación articular de amplitud de entre 0,01 a 0,04 radianes para cada articulación, en un espacio de tiempo reducido. Dado que el sistema se halla en regulación alrededor de una posición estacionaria, el controlador deberá absorber esta perturbación con el fin de llevar el sistema lo más rápidamente posible a la posición de reposo inicial. Debido a la presencia de la saturación en los pares de salida, solamente los controles PID multivariable, CTC, PFC y TSMC logran adecuadamente rechazar la perturbación (figura 3).
Robustez
Se varían los valores nominales de los parámetros dinámicos en un 20%. Los nuevos errores cartesianos para la consigna circular se muestran en la figura 4. Es claro que esta vez el controlador PID clásico no está presente, dado que no trabaja con el modelo de la planta.
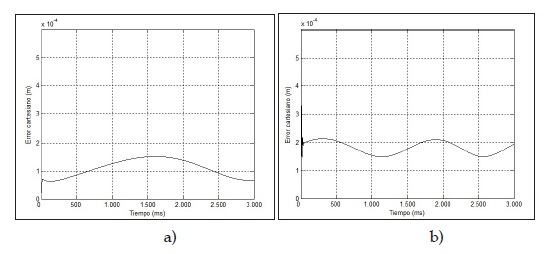

En la figura 5 se muestran los nuevos errores cartesianos para la consigna lineal incluyendo los errores en los parámetros dinámicos:


Esfuerzo de control
Dado que los pares que desarrollan los motores no pueden ser infinitos, estos se limitaron a ± 250 N.m mediante funciones de saturación. Las respuestas del error cartesiano para la trayectoria circular mostraron un mejor desempeño del control PID clásico. Sin embargo, los pares en este caso para los primeros 0,5 segundos son bastante altos si se los compara con los pares exigidos por el control TSMC, el cual produjo el segundo mejor comportamiento en cuanto a error cartesiano. Ambos pares se muestran en la figura 6:

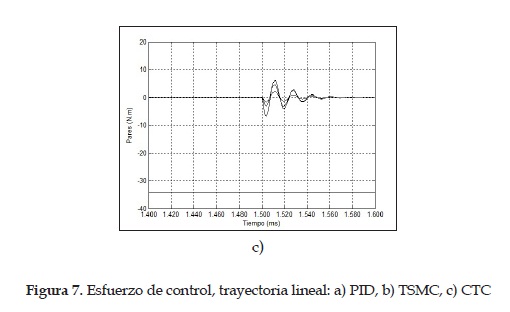
Para la trayectoria lineal, el sistema exige bastante del controlador al momento del cambio de dirección. La figura 7 muestra el esfuerzo de control de las estrategias PID y TSMC (las que menor error cartesiano produjeron al momento del cambio de dirección), así como el esfuerzo de control de la estrategia CTC, la que menor par exige de todas las estrategias estudiadas.

DISCUSIÓN
El control PID clásico es la estrategia más utilizada en la industria para el control de robots manipuladores. Gracias a su sencillez y a su amplia difusión, es la primera opción al implementar un sistema de control industrial. Pese a que no contiene el modelo matemático de la planta, produce un buen desempeño en cuanto a error cartesiano, aunque consume bastante energía y no logra absorber las perturbaciones introducidas al sistema.
El enfoque PID multivariable proporciona, en general, buenas respuestas, aunque no tanto como los demás controladores en estudio. Esto se explica por la pobre aproximación del modelo linealizado alrededor del punto de operación frente a los otros esquemas en las que la linealización es exacta o no se usa del todo. Su ventaja radica en el buen desempeño frente a las perturbaciones introducidas, así como en la sencillez de su cálculo e implementación.
El segundo controlador más popular en la robótica industrial, y que sí involucra el modelo de la planta, es el control por par calculado (CTC). Su complejidad no es muy alta y las respuestas que proporciona son bastante aceptables. En las pruebas realizadas, su desempeño fue bastante similar al de los controladores más avanzados, aunque presenta algún error en estado estacionario (que eventualmente podría disminuirse con la adición de un integrador en el lazo de control). En cuanto a consumo de energía, su desempeño es bastante bueno, como lo muestra el par desarrollado en la trayectoria lineal con cambio de dirección.
El control backstepping con incertidumbre, que en estudios realizados [23] muestra un mejor desempeño que el control robusto típico, presenta, como era de esperarse, una muy buena respuesta en el seguimiento de la trayectoria circular con errores en el modelo, confirmando así su buen desempeño cuando el modelo no es conocido con exactitud o cuando existen dinámicas no modeladas. Sin embargo, no reacciona muy bien cuando la consigna cambia bruscamente, y tampoco puede absorber la perturbación introducida. Por otra parte, dependiendo del dimensionamiento de la incertidumbre esperada, los esfuerzos de control resultantes pueden llegar a ser más altos de los necesarios.
El control predictivo funcional (PFC), a pesar de producir un error transitorio alto frente a la consigna circular, debido al ajuste inicial que necesita la ley de control, logra establecer uno de los errores estacionarios más bajos entre los controladores del estudio, sin errores en los valores de los parámetros dinámicos y con errores en estos. Sus características predictivas lo hacen también muy adecuado frente a los cambios bruscos en la consigna, y logra también absorber la perturbación introducida. Sin embargo, es inferior a los otros controladores basados en el modelo en cuanto al porcentaje de variación de parámetros que soporta, ya que responde frente a una variación de poco más del 20%, mientras que los demás pueden llegar hasta el 50% en algunos casos.
Por último, la estrategia de control por modos deslizantes terminal (TSMC), la cual en análisis realizados anteriormente produjo un mejor desempeño frente al control por modos deslizantes típico [24], mostró muy buenos resultados en todas las pruebas realizadas, desde el seguimiento de trayectorias hasta los esfuerzos de control. Su principal desventaja es la complejidad de cálculo y sintonía, dado que precisa del establecimiento a priori de umbrales para las variaciones paramétricas o normas de los disturbios máximos esperados en el sistema. Esta complejidad también se reflejará en la mayor capacidad de cómputo requerida para la implementación del controlador.
CONCLUSIONES
Este artículo analizó diversos controladores y su desempeño en el control de un robot manipulador de uso industrial. Se escogió para el estudio un robot tipo SCARA, ampliamente utilizado para tareas de ensamblado. Se realizó el modelado matemático de este robot y se lo sometió a diversas pruebas en simulación, con consignas de tipo industrial. Estas consignas fueron: un círculo de reducido diámetro; una consigna lineal con cambio brusco de dirección; respuesta frente a perturbaciones externas; y respuesta frente a cambios en los valores de los parámetros dinámicos identificados.
El estudio inició con el popular PID clásico, el cual no involucra ningún tipo de modelo matemático; luego se introdujo el modelo de la planta y se analizaron los controladores PID multivariable, por par calculado (CTC), backstepping con incertidumbre (CBI), predictivo funcional (PFC) y por modos deslizantes terminal (TSMC). Los resultados obtenidos dan una buena idea sobre los desempeños de cada controlador y sobre las circunstancias en las cuales sus ventajas pueden ser más visibles.
Para el caso de manipuladores tipo serie como el analizado, las no linea-lidades de los modelos no son tan grandes como para que se observen grandes diferencias de desempeño entre los controladores lineales tipo PID y aquellos cuya ley de control es no lineal. Corresponde al diseñador sopesar las ventajas que se obtienen en el desempeño frente a la complejidad de los algoritmos de cálculo. Un controlador robusto resulta atractivo siempre que se esperen variaciones importantes entre el modelo y el sistema real o existan disturbios importantes, pero es claro que el beneficio de la robustez debe pagarse con un mayor esfuerzo de control. Un controlador tipo PID puede lograr velocidades de respuesta altas, pero esta velocidad debe pagarse con un mayor esfuerzo de control. Nuevamente, el diseñador deberá decidir acerca de estos compromisos.
Futuros trabajos implementarán estas estrategias sobre un robot real, aparte de probar otros enfoques como el control inteligente o el control adaptativo.
Agradecimientos
Los autores agradecen el apoyo prestado por la Universidad del Cauca (Colombia) para la elaboración de esta investigación.
REFERENCIAS
[I] W. Khalil and E. Dombre, Modeling identification and control of robots. London: Hermes Penton Science, 2002, pp. 347-376. [ Links ]
[2] M. Spong, "Motion control of robot manipulator", in The Control Handbook, W. Levine, Ed. Boca, FL.: CRC Press, 1996, pp. 1339-1350. [ Links ]
[3] R. Burkan and I. Uzmay, "Variable upper bounding approach for adaptive robust control in robot control", Journal of Intelligent and Robotic Systems, vol. 34, pp. 427- 442, 2003. [ Links ]
[4] F. Mnif, "A robust optimal controller for constrained robot manipulators", Journal of Systems and Control Engineering, vol. 218, pp. 329-342, 2004. [ Links ]
[5] J. Richalet, Pratique de la Commande Prédictive. Paris:Hermés, 1993, pp. 121154. [ Links ]
[6] J. Rossiter, "Predictive functional control: more than one way to prestabilise", in 15* ifac World Congress, Barcelona, 2002. [ Links ]
[7] S. Venkataraman and S. Gulati, "Terminal sliding modes: a new approach to nonlinear control synthesis", in Fifth International Conference on Advanced Robotics, Pisa, Italy, 1991, pp. 443 - 448. [ Links ]
[8] S. Yu, X. Yu, B. Shirinzadeh, and Z. Man, "Continuous finite-time control for robotic manipulators with terminal sliding mode", Automatica, vol. 41, pp. 1957-1964, 2005. [ Links ]
[9] Kuka Robots [Online]. Available:http://www.kuka.com. [Accessed: Nov. 20, 2009]. [ Links ]
[10] Kuka Robot Group, KR5 Scara R350, R550 specifications, KUKA Roboter GmbH, [Online]. Available: http://www.kuka.com. [Accessed: Nov. 20, 2009]. [ Links ]
[11] M. Tarokh and H. Seraji, "A control scheme for trajectory tracking of robot manipulator", in ieee International Conference on Robotics and Automation, Philadelphia, USA, 1988, pp. 1192-1197. [ Links ]
[12] J. Bay, Fundamentals of Linear State Space Systems. Boston: WCB/McGraw-Hill, 1998, pp. 365-412. [ Links ]
[13] E. Muñoz y C. Gaviria, "Control PID multivariable y modos deslizantes de un robot SCARA", en VIII Congreso de la Asociación Colombiana de Automática, Cartagena, 2009. [ Links ]
[14] H. Sage, M. Mathelin, and E. Ostertag, "Robust control of robot manipulators: a survey", International Journal of Control, vol. 72, pp. 1498-1522, 1999. [ Links ]
[15] A. Lotfasar, M. Eghtesad, and M. Mohseni, "Application and comparison ofpassivity- based and integrator backstepping controlmethods for trajectorytracking ofrigid-link robot manipulators incorporating motor dynamics", International Journal of Robotics & Automation, vol. 22, pp. 196-205, 2007. [ Links ]
[16] Y. Zhang, "Backstepping control of linear time-varying systems with known and unknown parameters", ieee Transactions on Automatic Control, vol. 48, n°. 11, pp. 1908-1925, 2003. [ Links ]
[17] M. Spong, "On the robust control of robot manipulators", ieee Transaction on Automatic Control, vol. 37, pp. 1782-1786, 1992. [ Links ]
[18] R. Burkanasd and I. Uzmay, "Logarithmic based robust control approach to parametric uncertainty for control of robot manipulators", International Journal of Robust and Nonlinear Control, vol. 15, pp. 427- 436, 2005. [ Links ]
[19] A. Vivas and P. Poignet, "Predictive functional control of a parallel robot", Control Engineering Practice, vol. 13, n°7, pp. 863 - 874, 2005. [ Links ]
[20] A. Vivas, "Control predictivo de un robot tipo SCARA", Revista Chilena de Ingeniería, vol. 14, pp. 137 - 147, 2006. [ Links ]
[21] X. Wu, X. Yu, and Z. Man, "Terminal sliding mode control design for uncertain dynamic systems", Systems & Control Letters, vol. 34, pp. 281-287, 1998. [ Links ]
[22] Z. Man, P. Paplinski, and H. Wu, "A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators", ieee Transactions on Automatic Control, vol. 39, pp. 2464-2469, 1994. [ Links ]
[23] V. Mosquera, "Control robusto de un robot de más de tres grados de libertad". Tesis de maestría en Electrónica y Telecomunicaciones, Facultad de Electrónica, Universidad del Cauca, Popayan (Colombia), 2009, pp. 63-83. [ Links ]
[24] E. Muñoz, "Control no lineal de un robot manipulador". Tesis de maestría en Electrónica y Telecomunicaciones, Facultad de Electrónica, Universidad del Cauca, Popayán (Colombia), 2009, pp. 39-58. [ Links ]

