










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Desarrollo
versão impressa ISSN 0122-3461
Ing. Desarro. vol.32 no.1 Barranquilla jan./jun. 2014
ARTÍCULO DE INVESTIGACIÓN / RESEARCH ARTICLE
Maximización de captura de energía en turbinas eólicas de velocidad variable usando control proporcional integral generalizado
Energy capture maximization on variable-speed wind turbines through generalized proportional integral control
Horacio Coral-Enríquez*
John Cortés-Romero**
Germán A. Ramos***
Universidad Nacional de Colombia
* Departamento de Ingeniería Eléctrica y Electrónica. Ingeniero en Automática Industrial, Universidad del Cauca. Magíster en Ingeniería, énfasis en Automática, Universidad del Valle. Estudiante del Doctorado en Ingeniería Mecánica y Mecatrónica de la Universidad Nacional de Colombia. Entre las áreas de especialidad se incluyen la teoría de control, el control de turbinas eólicas y el control por rechazo activo de perturbaciones. hacorale@unal.edu.co
** Departamento de Ingeniería Eléctrica y Electrónica. Ingeniero electricista, Universidad Nacional de Colombia. Magíster en Matemáticas y en Automatización Industrial, Universidad Nacional de Colombia. Doctor en Ciencias, Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional de México. Entre las áreas de especialidad se incluyen el control de sistemas electromecánicos, la teoría de control y el control de procesos electrónicos. jacortesr@unal.edu.co
*** Departamento de Ingeniería Eléctrica y Electrónica. Ingeniero Electricista, Universidad Nacional de Colombia. Magíster en Automatización Industrial, Universidad Nacional de Colombia. Doctor en Ciencias, Universitat Politècnica de Catalunya (España). Entre las áreas de especialidad se incluyen el control de sistemas electromecánicos, la teoría de control y el control repetitivo. garamosf@unal.edu.co
Correspondencia: Horacio Coral-Enríquez, Tel: 57 (1) 3165000 ext. 11147, Avenida carrera 30 n.° 45-03, edificio 453, oficina 222, Bogotá (Colombia).
Fecha de recepción: 3 de julio de 2013
Fecha de aceptación: 25 de julio de 2013
Resumen
En este artículo se propone una técnica alternativa de control lineal para maximizar la energía eólica capturada en una turbina eólica de eje horizontal. La estrategia propuesta se basa en técnicas de control proporcional integral generalizado (GPI) soportadas bajo el enfoque del rechazo activo de perturbaciones, que permite seguir de forma asintótica una trayectoria de referencia óptima de la velocidad del rotor sin el conocimiento exacto del modelo de la turbina eólica. La maximización de captura de energía se centra en mantener la velocidad específica de la turbina en su valor óptimo, por medio del control de la velocidad del rotor sobre una trayectoria óptima, en el cual el coeficiente de potencia es máximo. La metodología propuesta es validada mediante simulación usando una turbina eólica de 4,8 MW y comparada con una estrategia de control de par estándar. Los resultados muestran que las estrategias GPI propuestas son efectivas en términos de robustez y captura de energía.
Palabras clave: control proporcional integral generalizado, maximi-zación de captura de energía, rechazo activo de perturbaciones, turbinas eólicas.
Abstract
This paper proposes an alternative linear control technique to maximize the energy capture in a horizontal-axis wind turbine. The proposed strategy is based on Generalized Proportional Integral (GPI) controllers supported by the active disturbance rejection approach, which allows asymptotic tracking of a rotor speed reference trajectory without exact wind turbine model knowledge. The proposed methodology controls the tip-speed ratio, via the rotor angular speed, to an optimum point at which power ci! coefficient is maximum. Several simulations are performed on a 4.8MW wind turbine benchmark model in order to validate the proposed control strategy and to compare it to a classical controller. The simulation results show that the proposed control strategies are effective in terms of power capture and robustness.
Keywords: active disturbance rejection, generalized proportional integral control, maximum energy capture, wind turbines.
1. INTRODUCCIÓN
El uso de la energía del viento tiene una historia de cientos de años y sus aplicaciones se ven reflejadas en la agricultura, molienda de granos, bombeo de agua y producción de electricidad. Desde los años setenta, esta tecnología inició un importante desarrollo, comenzó como experimental, hasta ser la fuente de energía renovable de más rápido crecimiento en el mundo [1]. Hoy en día la conversión de energía eólica en energía eléctrica mediante turbinas eólicas puede ser considerada como la opción más prometedora para reemplazar una parte significativa del consumo eléctrico mundial suministrado por fuentes de energía convencionales [2].
Las turbinas eólicas tienen como función principal convertir de la manera más eficiente la energía del viento en energía eléctrica. Existen varios tipos: turbinas eólicas de eje vertical, de eje horizontal, de velocidad variable, de velocidad fija, etc., pero actualmente las de eje horizontal y velocidad variable son el tipo más común, principalmente debido a sus capacidades superiores de captura y de producción de energía [3]. Estas turbinas han tenido un desarrollo y crecimiento exponencial en el ámbito mundial, no solo por su tamaño o aerodinámica avanzada, sino por los algoritmos de control que las operan. En este sentido, los sistemas de control toman un rol muy importante en la operación de turbinas eólicas, hasta el punto que la eficiencia y robustez de las estrategias de control desarrolladas afectan significativamente tanto el comportamiento y eficiencia de las turbinas eólicas como el costo de producción de energía. Esto es una motivación para desarrollar, aplicar y evaluar nuevas alternativas de control que mejoren su desempeño.
Las turbinas eólicas de eje horizontal funcionan en diferentes regiones de operación que dependen principalmente de la magnitud de la velocidad del viento. La región considerada en este trabajo es la 2 (velocidad del viento baja a media), en la que el principal objetivo es la maximización de captura de energía eólica. En esta región, gran cantidad de estrategias de control han sido investigadas para encontrar la mejor manera de resolver el problema de maximización de captura de energía [4]-[10]. Las estrategias van desde el control de par estándar [4], control por seguimiento a perturbaciones [5], control por seguimiento del punto máximo de potencia [6] y control por anticipación del par aerodinámico [7] hasta complejas estrategias de control [8]-[10]. Muchas de esas técnicas enfrentan las no linealidades de la turbina eólica acudiendo a linealizaciones o complejas estrategias de control no lineal. Sin embargo, algunas de las técnicas basadas en la filosofía del rechazo activo de perturbaciones (RAP) [11], [12] permiten soluciones simples y efectivas de control lineal para sistemas no lineales con incertidumbre.
Una metodología madura dentro de la filosofía RAP es el control basado en reconstructores integrales, que ha sido denominado control proporcional integral generalizado (GPI). Este esquema de control fue iniciado por M. Fliess, R. Márquez, E. Delaleau y H. Sira-Ramírez desde el año 2000 [13], [14], e involucra en su diseño el rechazo activo de perturbaciones mediante la aproximación del modelo interno de la función de perturbación [15]. Las estrategias de control GPI han sido adaptadas, extendidas y aplicadas con éxito en áreas diferentes a la energía eólica, como el control de motores de inducción [16], control de robots [17], sistemas caóticos [18], convertidores [19], rectificadores [20], [21], entre otros. Por lo tanto, resulta interesante adaptar, evaluar y determinar el alcance de esta metodología de control en la operación de turbinas eólicas en la región 2.
Este artículo presenta el desarrollo y evaluación de una estrategia alternativa de control lineal basada en controladores GPI para la maximización de captura de energía en turbinas eólicas de eje horizontal operando en la región 2. El objetivo de control se centra en mantener la velocidad específica de la turbina en su valor óptimo, por medio del control de la velocidad del rotor para seguir una trayectoria de referencia óptima generada a partir de la velocidad del viento, manipulando el par del generador. Esta estrategia alternativa de control para la región 2 permite considerar las siguientes hipótesis de investigación: i) al mejorar la aproximación del modelo interno de la función de perturbación se obtienen ventajas en el sistema de control como la disminución del error de seguimiento y el aumento del desempeño, ii) las estrategias propuestas GPI junto con un establecimiento adecuado de la velocidad óptima del rotor permiten la maximización de captura de energía eólica, y iii) las estrategias de control GPI pueden ser vistas como una alternativa de control lineal aplicable a la operación de turbinas eólicas en la región 2.
Este artículo está organizado de la siguiente forma: la sección 2 presenta el modelo matemático no lineal de turbinas eólicas de eje horizontal orientado para propósitos de control. En la sección 3 se formula el problema de control. La sección 4 presenta el diseño y desarrollo de las estrategias de control GPI propuestas para abordar la solución al problema de maximización de captura de energía. La sección 5 presenta los resultados obtenidos en las simulaciones, así como el análisis de desempeño, eficiencia, estabilidad y robustez de las estrategias de control propuestas. Finalmente, la sección 6 presenta las conclusiones.
2. MODELO DINáMICO DE TURBINAS EÓLICAS DE EJE HORIZONTAL
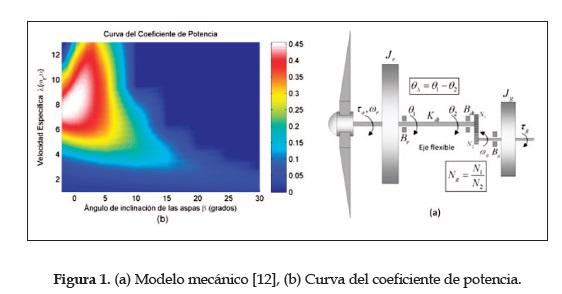
Considere una turbina eólica representada por un sistema mecánico como el mostrado en la figura 1, en donde la potencia aerodinámica capturada por el rotor está dada por [8]:
donde  es el radio del rotor, p es la densidad del aire ,
es el radio del rotor, p es la densidad del aire ,  es la velocidad del viento y
es la velocidad del viento y  es el coeficiente de potencia que denota la eficiencia aerodinámica del sistema eólico. La curva del coeficiente de potencia
es el coeficiente de potencia que denota la eficiencia aerodinámica del sistema eólico. La curva del coeficiente de potencia  de la turbina considerada en este artículo se muestra en la figura 1b [22]. Esta curva se obtiene mediante el uso de
de la turbina considerada en este artículo se muestra en la figura 1b [22]. Esta curva se obtiene mediante el uso de  y depende del tipo de turbina, forma aerodinámica, tamaño, cantidad de aspas / palas, etc. La curva es calculada por un programa creado para este propósito llamado WT_perf desarrollado por NWTC (National Wind Technology Center) y se implementa usando tablas dinámicas para propósitos de simulación. El coeficiente
y depende del tipo de turbina, forma aerodinámica, tamaño, cantidad de aspas / palas, etc. La curva es calculada por un programa creado para este propósito llamado WT_perf desarrollado por NWTC (National Wind Technology Center) y se implementa usando tablas dinámicas para propósitos de simulación. El coeficiente  depende del ángulo de inclinación de las aspas
depende del ángulo de inclinación de las aspas  y de la velocidad específica (VE)
y de la velocidad específica (VE)  Esta última se define así [22]:
Esta última se define así [22]:
donde  es la velocidad angular del rotor. La potencia aerodinámica
es la velocidad angular del rotor. La potencia aerodinámica  también se puede expresar en función del par aerodinámico y la velocidad angular del rotor, así [8]:
también se puede expresar en función del par aerodinámico y la velocidad angular del rotor, así [8]:
El par aerodinámico  generado en el rotor está dado por:
generado en el rotor está dado por:

donde  es el coeficiente de par del sistema eólico y se define como sigue:
es el coeficiente de par del sistema eólico y se define como sigue:
El sistema mecánico de la turbina eólica es modelado mediante leyes de Newton, obteniendo el siguiente sistema de ecuaciones diferenciales [22]:
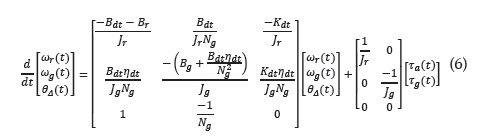
donde  es la velocidad angular del generador,
es la velocidad angular del generador,  es el ángulo de torsión del eje del rotor,
es el ángulo de torsión del eje del rotor,  es el momento de inercia del eje de baja velocidad,
es el momento de inercia del eje de baja velocidad,  es el momento de inercia del eje de alta velocidad,
es el momento de inercia del eje de alta velocidad,  es la constante de rigidez torsional del sistema de transmisión,
es la constante de rigidez torsional del sistema de transmisión,  es el coeficiente de amortiguamiento torsional del sistema de transmisión,
es el coeficiente de amortiguamiento torsional del sistema de transmisión,  es la fricción viscosa del eje de baja velocidad,
es la fricción viscosa del eje de baja velocidad,  es la fricción viscosa del eje de alta velocidad,
es la fricción viscosa del eje de alta velocidad,  es la relación de engranajes del sistema de transmisión,
es la relación de engranajes del sistema de transmisión,  es la eficiencia del sistema de transmisión y
es la eficiencia del sistema de transmisión y  es el par del generador. El par
es el par del generador. El par  es función no lineal de
es función no lineal de 
Las dinámicas del convertidor de potencia y del generador están dadas por [22]:
respectivamente, donde  es el par deseado del generador,
es el par deseado del generador,  es la potencia producida por el generador, a
es la potencia producida por el generador, a  denota la dinámica del convertidor / generador y
denota la dinámica del convertidor / generador y  es la eficiencia del generador.
es la eficiencia del generador.
3. FORMULACIÓN DEL PROBLEMA DE CONTROL
Consideraciones preliminares
Con relación al sistema descrito por las ecuaciones (1)-(8), se plantean las siguientes suposiciones:
C1. Los parámetros del sistema eólico se suponen conocidos.
C2. La entrada de perturbación  y un número finito de sus derivadas se suponen desconocidos, pero uniformemente y absolutamente acotados. Es decir, dado un número entero
y un número finito de sus derivadas se suponen desconocidos, pero uniformemente y absolutamente acotados. Es decir, dado un número entero  , existe una constante
, existe una constante  tal que, sup
tal que, sup 
C3. Dada una función de entrada considerada suave  existe una solución nominal (sin perturbaciones)
existe una solución nominal (sin perturbaciones)  del sistema eólico para cada conjunto de condiciones iniciales
del sistema eólico para cada conjunto de condiciones iniciales  . Entonces, dada una trayectoria de referencia suave
. Entonces, dada una trayectoria de referencia suave  existe una entrada de control
existe una entrada de control  correspondiente en lazo abierto.
correspondiente en lazo abierto.
C4. Tanto la velocidad angular del eje del rotor como la velocidad del viento se suponen señales disponibles para el uso en los lazos de control. La velocidad del rotor, aunque es en ocasiones una variable no medida en el sistema eólico, puede ser fácilmente estimada a partir de la velocidad angular del generador . Por otro lado, la velocidad del viento puede ser potencialmente medida de forma remota por un sensor Lidar  . La tecnología Lidar tiene la habilidad de obtener mediciones en tiempo real de las condiciones locales del viento para una turbina eólica [23]. Mejoras recientes en la confiabilidad, tamaño y costo de la tecnología Lidar han hecho realista la obtención de mediciones precisas de la velocidad del viento en turbinas eólicas de eje horizontal [24].
. La tecnología Lidar tiene la habilidad de obtener mediciones en tiempo real de las condiciones locales del viento para una turbina eólica [23]. Mejoras recientes en la confiabilidad, tamaño y costo de la tecnología Lidar han hecho realista la obtención de mediciones precisas de la velocidad del viento en turbinas eólicas de eje horizontal [24].
Formulación del problema
En la región de operación 2, el objetivo de control principal es la maximización de captura de energía eólica. Este objetivo tiene inmediata relación con la curva del coeficiente de potencia de la turbina eólica cuyo punto máximo corresponde a:

donde,
En consecuencia, con el fin de maximizar la captura de energía eólica, el ángulo de las aspas  se fija en su valor óptimo
se fija en su valor óptimo  y para mantener a
y para mantener a  en su valor óptimo
en su valor óptimo  la velocidad del rotor debe ser ajustada para seguir la trayectoria óptima
la velocidad del rotor debe ser ajustada para seguir la trayectoria óptima  , dada por:
, dada por:

Entonces, el problema de control es seguir la trayectoria de la velocidad óptima del rotor independientemente de las posibles perturbaciones externas no modeladas en el sistema eólico, usando como entrada de control al par del generador y considerando disponibles la velocidad angular del rotor y la velocidad del viento .
4. METODOLOGÍA DE DISEÑO GPI PARA TURBINAS EÓLICAS
De las ecuaciones (6) y (7) de la turbina eólica y considerando los siguientes pares de transformada de Laplace:  se puede llegar a la siguiente representación dada en términos de funciones de transferencia:
se puede llegar a la siguiente representación dada en términos de funciones de transferencia:

con 
 .
.
Reorganizando [12] agrupando términos, se obtiene el siguiente sistema simplificado (propio del enfoque RAP):

con,

donde  son constantes conocidas y
son constantes conocidas y  es una entrada de perturbación agrupada que incluye efectos de perturbaciones externas e internas. La función de perturbación es modelada mediante la aproximación de su modelo interno dado por:
es una entrada de perturbación agrupada que incluye efectos de perturbaciones externas e internas. La función de perturbación es modelada mediante la aproximación de su modelo interno dado por:
donde la entrada de perturbación dado que es función diferencial de  es también una señal del tiempo completamente desconocida, pero uniformemente y absolutamente acotada
es también una señal del tiempo completamente desconocida, pero uniformemente y absolutamente acotada  . La aproximación del modelo interno de la función de perturbación es equivalente a un modelo local de aproximado alrededor de
. La aproximación del modelo interno de la función de perturbación es equivalente a un modelo local de aproximado alrededor de  por un polinomio temporal de Taylor de orden
por un polinomio temporal de Taylor de orden 
El problema de control implica que la salida del sistema siga una trayectoria de referencia suave  , con error de seguimiento
, con error de seguimiento  absolutamente acotado por una cantidad constante
absolutamente acotado por una cantidad constante 
Teorema
Considerando: el modelo del sistema eólico representado por (1)-(8), su correspondiente versión simplificada (13) y las consideraciones preliminares C1-C4, se tiene que el controlador

con  fuerza asintóticamente y ex-ponencialmente al error de seguimiento
fuerza asintóticamente y ex-ponencialmente al error de seguimiento  a converger hacia el interior de un disco centrado en cero, siempre que el conjunto de coeficientes
a converger hacia el interior de un disco centrado en cero, siempre que el conjunto de coeficientes  se seleccionen de tal forma que el polinomio
se seleccionen de tal forma que el polinomio  en la variable compleja
en la variable compleja  , definido por
, definido por 
Nota 1: la función que  forma parte de la ley de control en (16) implica tener derivadas de la trayectoria de referencia óptima
forma parte de la ley de control en (16) implica tener derivadas de la trayectoria de referencia óptima  . Sin embargo, esto no es un inconveniente, debido a que
. Sin embargo, esto no es un inconveniente, debido a que  es una función suave y además es posible aproximar la derivada temporal con una derivada filtrada apropiadamente seleccionada.
es una función suave y además es posible aproximar la derivada temporal con una derivada filtrada apropiadamente seleccionada.
Nota 2: la convergencia del error de seguimiento,  es independiente del par aerodinámico,
es independiente del par aerodinámico,  dado que este último funge como una perturbación externa desconocida.
dado que este último funge como una perturbación externa desconocida.
Prueba
Se define el error de seguimiento en la variable compleja como  y bajo la definición del polinomio
y bajo la definición del polinomio  se obtiene que la dinámica del error de seguimiento está dada por:
se obtiene que la dinámica del error de seguimiento está dada por:

A continuación se define una función de transferencia entre el error de seguimiento  y la función de perturbación
y la función de perturbación  representando su correspondiente descomposición en fracciones parciales
representando su correspondiente descomposición en fracciones parciales

con  sus correspondientes polos estables. Luego, acorde a [25] se puede obtener una cota para el error de seguimiento dada por:
sus correspondientes polos estables. Luego, acorde a [25] se puede obtener una cota para el error de seguimiento dada por:

Por lo tanto, la convergencia asintótica del error de seguimiento y consecuentemente el radio del disco con centro en cero que acota su evolución en el tiempo, pueden ser arbitrariamente gobernados de acuerdo con la parte real de los polos asignados y la dominancia característica de cada uno de ellos.
Controlador  aproximación de función de perturbación de orden 1
aproximación de función de perturbación de orden 1
Definida la aproximación de la función de perturbación de orden 1  , la ley de control robusta GPI es:
, la ley de control robusta GPI es:

Controlador  aproximación de función de perturbación de orden 3
aproximación de función de perturbación de orden 3
Definida la aproximación de la función de perturbación de orden 3  , la ley de control robusta GPI es:
, la ley de control robusta GPI es:

Se espera que el controlador  fuerce al error de seguimiento a permanecer dentro de un disco con centro en cero y radio inferior al logrado por el controlador
fuerce al error de seguimiento a permanecer dentro de un disco con centro en cero y radio inferior al logrado por el controlador  (considerando asignación similar de las raíces de los correspondientes polinomios característicos del error de seguimiento). Es decir, bajo determinada trayectoria de referencia el error de seguimiento obtenido por los controladores y tendrá una cota máxima definida por
(considerando asignación similar de las raíces de los correspondientes polinomios característicos del error de seguimiento). Es decir, bajo determinada trayectoria de referencia el error de seguimiento obtenido por los controladores y tendrá una cota máxima definida por  respectivamente. No obstante, al considerar una mejor aproximación de la función de perturbación en el controlador se espera que
respectivamente. No obstante, al considerar una mejor aproximación de la función de perturbación en el controlador se espera que 
 para controladores GPI
para controladores GPI
Por definición, cada controlador GPI contiene un número finito de integraciones iteradas del error de seguimiento cuya cantidad depende de la selección del parámetro  . Los integradores puros en los controladores son propensos a sufrir de un efecto conocido como
. Los integradores puros en los controladores son propensos a sufrir de un efecto conocido como  ocasionado principalmente por saturaciones en las señales de control. Este efecto puede degradar el desempeño de los sistemas de control o incluso comprometer la estabilidad del sistema. A continuación se describe la estrategia
ocasionado principalmente por saturaciones en las señales de control. Este efecto puede degradar el desempeño de los sistemas de control o incluso comprometer la estabilidad del sistema. A continuación se describe la estrategia  utilizada y adaptada para el caso de los controladores GPI [26]:
utilizada y adaptada para el caso de los controladores GPI [26]:
De (16) tomamos la parte del controlador GPI que es propensa a sufrir efectos y se reescribe como,

donde  y
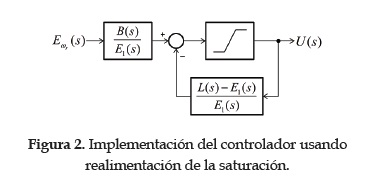
y  son polinomios en . Entonces, el controlador (23) puede ser implementado por medio de la realimentación de la saturación, como se observa en la figura 2, donde el polinomio
son polinomios en . Entonces, el controlador (23) puede ser implementado por medio de la realimentación de la saturación, como se observa en la figura 2, donde el polinomio  puede ser en principio cualquier polinomio mónico estable de orden
puede ser en principio cualquier polinomio mónico estable de orden 
La calidad del desempeño de este esquema depende de la selección apropiada de . Note que cuando no hay saturación se tiene que  y entonces
y entonces  , lo cual es la misma dinámica lineal del controlador GPI en (23). Por otro lado, cuando hay saturación, la dinámica del polinomio mejora el comportamiento del controlador.
, lo cual es la misma dinámica lineal del controlador GPI en (23). Por otro lado, cuando hay saturación, la dinámica del polinomio mejora el comportamiento del controlador.
Parámetros de simulación
Los controladores (21) y (22) fueron implementados e incluidos en el Benchmark publicado en [22]. Los parámetros de los controladores y se sintonizaron tal que el polinomio característico de los errores de seguimiento tenga las siguientes raíces:

Cada controlador GPI se implementó usando la estrategia descrita anteriormente, con los siguientes polinomios:

La velocidad del viento es filtrada usando un filtro pasa bajo de primer orden con frecuencia de corte en  Cada derivada temporal de la trayectoria de referencia fue aproximada a una derivada filtrada
Cada derivada temporal de la trayectoria de referencia fue aproximada a una derivada filtrada  con
con  y
y 
La estrategia de control clásica para la región de operación 2 definida en el Benchmark [22] es un control de par estándar con la siguiente ley de control:  Por limitación en la extensión del trabajo, aquí no se dan descripciones profundas de los modelos y valores de los parámetros de la turbina eólica, así como del perfil de viento utilizado en las simulaciones sin embargo toda la descripción necesaria se puede detallar en [22].
Por limitación en la extensión del trabajo, aquí no se dan descripciones profundas de los modelos y valores de los parámetros de la turbina eólica, así como del perfil de viento utilizado en las simulaciones sin embargo toda la descripción necesaria se puede detallar en [22].
5. RESULTADOS Y DISCUSIÓN
Seguimiento y captura de potencia aerodinámica
La figura 3b muestra el resultado del seguimiento de la trayectoria de referencia óptima de la velocidad del rotor para una turbina eólica de 4,8 MW con los controladores propuestos (21) y (22) en condiciones nominales. Ambos sistemas de control alcanzan la trayectoria de referencia deseada  , con error de seguimiento cercano a cero (ver figura 3c).
, con error de seguimiento cercano a cero (ver figura 3c).
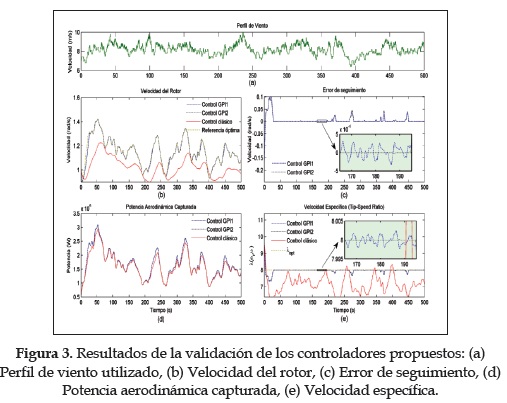
En las figuras 3d y 3e se detalla la potencia aerodinámica capturada por los controladores GPI y la evolución en el tiempo de la velocidad específica A del sistema eólico, respectivamente. Se observa que la potencia aerodinámica capturada usando los controladores GPI propuestos es mayor que la captura de potencia por el control clásico definido en el Benchmark [22]. Adicional-mente, se puede afirmar que: (a) las estrategias de control GPI propuestas llevan la velocidad específica A del sistema eólico a valores muy cercanos a su valor óptimo  lo que justifica una mayor captura de potencia eólica; (b) el controlador , debido a que utiliza una aproximación de la función de perturbación de mayor orden que el controlador
lo que justifica una mayor captura de potencia eólica; (b) el controlador , debido a que utiliza una aproximación de la función de perturbación de mayor orden que el controlador  , rechaza de forma más aproximada las perturbaciones obteniendo valores del error de seguimiento más cercanos a cero, confirmando que
, rechaza de forma más aproximada las perturbaciones obteniendo valores del error de seguimiento más cercanos a cero, confirmando que 
La eficiencia de los controladores se compara por medio del siguiente criterio denotado como eficiencia aerodinámica [8]:

Según el criterio definido en la ecuación (24) la eficiencia aerodinámica obtenida por ambos controladores GPI propuestos fue de 99,57%, mientras que la eficiencia del controlador clásico fue de 96,19%.
Nótese que la turbina eólica considerada en este estudio tiene una curva de potencia cuya cima (véase zona blanca en la figura 1b) puede considerarse aproximadamente plana para rangos de  y
y  . Por lo tanto, se pueden encontrar varios puntos dentro de la curva en donde, a pesar de tener un valor diferente a la velocidad específica óptima, aún la captura de energía puede ser cercana a la óptima. Es por esto que el control clásico tiene en ciertas zonas una captura de energía comparable a la lograda por los controladores GPI (ver diferencias en la figura 3d). No obstante, al considerar otra turbina eólica cuyas características aerodinámicas proporcionen una curva de potencia con una cima más pronunciada, el controlador clásico tendrá muchos problemas a la hora de maximizar la captura de energía.
. Por lo tanto, se pueden encontrar varios puntos dentro de la curva en donde, a pesar de tener un valor diferente a la velocidad específica óptima, aún la captura de energía puede ser cercana a la óptima. Es por esto que el control clásico tiene en ciertas zonas una captura de energía comparable a la lograda por los controladores GPI (ver diferencias en la figura 3d). No obstante, al considerar otra turbina eólica cuyas características aerodinámicas proporcionen una curva de potencia con una cima más pronunciada, el controlador clásico tendrá muchos problemas a la hora de maximizar la captura de energía.
Desempeño y robustez de las estrategias de control propuestas
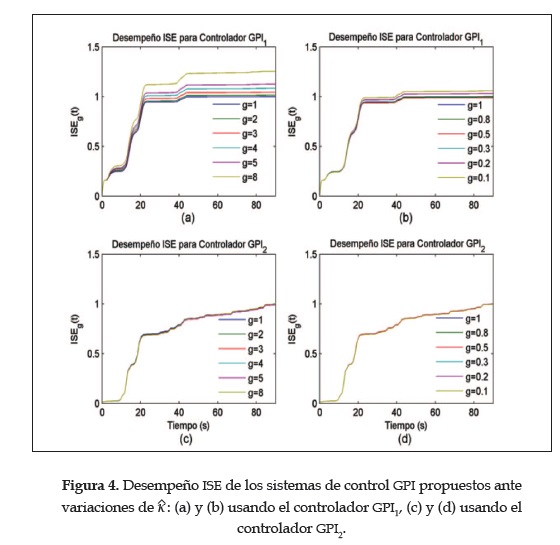
Para probar el desempeño de los controladores GPI respecto al parámetro de ganancia  , se consideró un factor de incertidumbre
, se consideró un factor de incertidumbre  que atenúa o amplifica el valor real de , y se agrega a cada ley de control como un nuevo parámetro
que atenúa o amplifica el valor real de , y se agrega a cada ley de control como un nuevo parámetro  Note que el conocimiento preciso de la ganancia ocurre cuando
Note que el conocimiento preciso de la ganancia ocurre cuando  . Se seleccionó un índice de desempeño tipo ISE
. Se seleccionó un índice de desempeño tipo ISE  para analizar de mejor manera el efecto de los cambios en el factor de cada controlador GPI en el sistema de control. Se definió el siguiente índice cuadrático:
para analizar de mejor manera el efecto de los cambios en el factor de cada controlador GPI en el sistema de control. Se definió el siguiente índice cuadrático:

donde  es un factor de normalización, tal que:
es un factor de normalización, tal que:  con
con  . La función
. La función representa la trayectoria de salida de la turbina eólica obtenida para un valor particular de
representa la trayectoria de salida de la turbina eólica obtenida para un valor particular de
La figura 4 muestra la evolución en el tiempo del índice de desempeño para diferentes valores de . Del conjunto de respuestas se observa que en general los sistemas de control usando el controlador y tienen degradación de desempeño a medida que se aleja de su valor nominal. El controlador tiene menor degradación de desempeño en comparación con el controlador y ambos controladores mantienen al sistema estable en todos los casos considerados de variación del parámetro de ganancia 
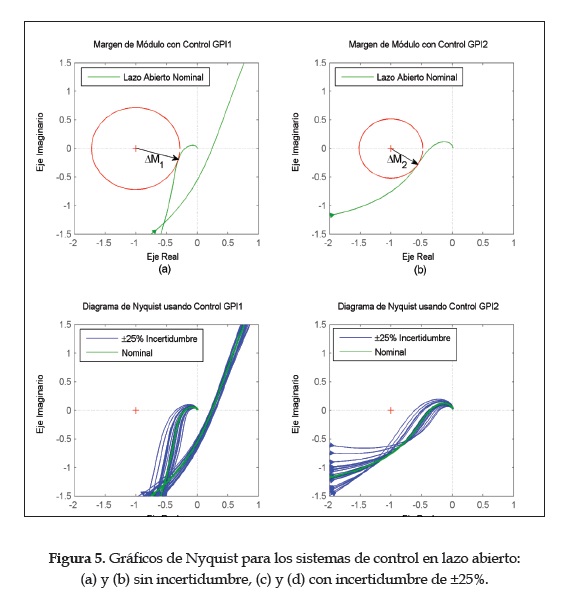
La robustez de los sistemas de control en lazo cerrado se puede evaluar mediante el análisis de las gráficas de Nyquist del sistema en lazo abierto. La distancia mínima entre la curva de Nyquist y el punto [-1, 0j] es conocido como el margen de módulo,  , y es una medición de la robustez del sistema nominal en lazo cerrado. Un sistema robusto debe tener un margen de módulo de al menos 0.5 [27]. Este margen es también importante porque define límites de tolerancia respecto a términos no lineales en el lazo de control (criterio del círculo [28]).
, y es una medición de la robustez del sistema nominal en lazo cerrado. Un sistema robusto debe tener un margen de módulo de al menos 0.5 [27]. Este margen es también importante porque define límites de tolerancia respecto a términos no lineales en el lazo de control (criterio del círculo [28]).
La figura 5 detalla diferentes respuestas en frecuencia (gráficos de Nyquist) de la función de transferencia de lazo abierto de cada sistema de control con los controladores y GPI . Las gráficas de Nyquist (a) y (b) muestran que el margen de módulo obtenido para cada sistema es  y
y  respectivamente. Los gráficos de Nyquist (c) y (d) muestran variaciones en la respuesta en frecuencia causadas por incertidumbre de
respectivamente. Los gráficos de Nyquist (c) y (d) muestran variaciones en la respuesta en frecuencia causadas por incertidumbre de  en los siguientes parámetros de la turbina eólica:
en los siguientes parámetros de la turbina eólica:  Se observa que los sistemas de control permanecen estables en lazo cerrado aun considerando alta incertidumbre en los parámetros más importantes del sistema eólico.
Se observa que los sistemas de control permanecen estables en lazo cerrado aun considerando alta incertidumbre en los parámetros más importantes del sistema eólico.
Los anteriores indicadores sugieren que los sistemas de control propuestos son lo suficientemente robustos para mantener la estabilidad del sistema ante posibles variaciones en los parámetros de la turbina eólica. Esto es veriicado al encontrar los márgenes de estabilidad robustos para cada lazo de control con los siguientes resultados: a) Sistema en lazo cerrado con control Cota inferior = 1.51, Cota superior = 1.58; b) Sistema en lazo cerrado con control : Cota inferior = 1.17, Cota superior = 1.19. Valores superiores a la unidad en los anteriores márgenes de estabilidad indican que los lazos de control propuestos alcanzan la estabilidad robusta para el conjunto de incertidumbres dadas. Los márgenes de estabilidad más altos logrados con el control indican que este sistema tolera más incertidumbre en los parámetros (antes de ser inestable) que el control .
Efectos de la función de prealimentación
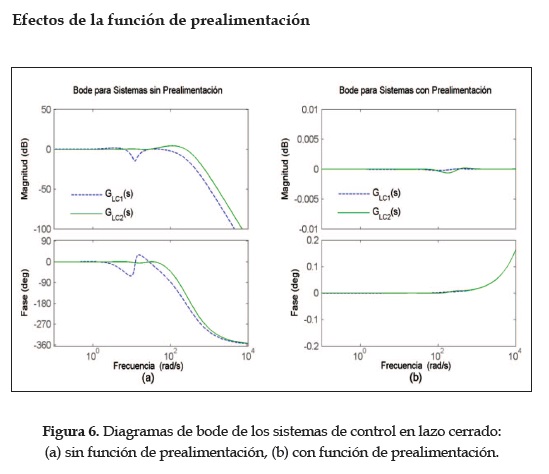
La respuesta en frecuencia de cada lazo de control con y sin función de preali-mentación  se muestra en la figura 6. Los gráficos de bode muestran que los sistemas de control con prealimentación de la señal de referencia tienen capacidad de seguimiento de trayectorias de referencia tanto en baja como en alta frecuencia con error de seguimiento dentro de una vecindad cercana a cero. Por otro lado, los sistemas de control sin función de prealimentación tienen capacidades de seguimiento restringidas a frecuencias inferiores de 114 rad / s y 300 rad / s para los controladores y respectivamente. Las estrategias de control propuestas presentan un comportamiento de lazo cerrado de alto desempeño considerando que la mayoría de los puntos de respuesta en frecuencia se encuentran alrededor de 0 dB y 0 grados.
se muestra en la figura 6. Los gráficos de bode muestran que los sistemas de control con prealimentación de la señal de referencia tienen capacidad de seguimiento de trayectorias de referencia tanto en baja como en alta frecuencia con error de seguimiento dentro de una vecindad cercana a cero. Por otro lado, los sistemas de control sin función de prealimentación tienen capacidades de seguimiento restringidas a frecuencias inferiores de 114 rad / s y 300 rad / s para los controladores y respectivamente. Las estrategias de control propuestas presentan un comportamiento de lazo cerrado de alto desempeño considerando que la mayoría de los puntos de respuesta en frecuencia se encuentran alrededor de 0 dB y 0 grados.
6. CONCLUSIONES
En este artículo se propuso una estrategia de control lineal de rechazo activo de perturbaciones con base en controladores GPI para turbinas eólicas de eje horizontal operando en la región 2. Los controladores se diseñaron para realizar el seguimiento de trayectorias óptimas de la velocidad del rotor que maximizan la captura de energía aerodinámica en el sistema. La estrategia de control utilizada transformó al sistema eólico no lineal en un sistema lineal perturbado por medio de una representación simplificada propia del enfoque RAP. El uso de la metodología de control GPI basada en el enfoque RAP logró acotar arbitrariamente y absolutamente el error de seguimiento de la velocidad del rotor, comprobando que al mejorar la aproximación del modelo interno de la función de perturbación es posible reducir dicha cota. Sin embargo, el éxito de este enfoque de maximización de captura de energía está limitado por la precisión de la medición o estimación de la velocidad del viento.
Se mostró, mediante validaciones en simulación, que las estrategias de control lineal GPI propuestas permiten realizar el seguimiento preciso de trayectorias de referencia para maximizar la captura de energía eólica, incluso ante variaciones paramétricas del sistema eólico y no linealidades en el sistema. Se analizó la robustez de los sistemas de control ante incer-tidumbre en el sistema eólico, comprobando la estabilidad robusta de las estrategias de control propuestas.
Los diferentes trabajos de investigación relacionados con el control de turbinas eólicas han demostrado que el comportamiento de estas es significativamente afectado por la estrategia de control usada. Esto provee una motivación para considerar nuevas alternativas de control que mejoren el desempeño de las turbinas sin realizar cambios estructurales. En este sentido, este trabajo muestra que las estrategias de control GPI pueden ser vistas como una alternativa de control lineal, bajo la filosofía del rechazo activo de perturbaciones, aplicable a la operación de turbinas eólicas en la región 2.
La adaptación, aplicación y evaluación de estrategias de control GPI para la operación de turbinas eólicas en la región 2 permitió obtener resultados que validan las tres hipótesis inicialmente planteadas. Esta validación permitió destacar especialmente las habilidades de los controladores GPI para maximizar la captura de energía a través del enfoque RAP.
REFERENCIAS
[1] I. Munteanu, A. I. Bratcu, N.-A. Cutululis, and E. Ceanga, Optimal control of wind energy systems, Springer-Verlag London Limited, 2008. [ Links ]
[2] F. D. Bianchi, R. S. Sánchez-Peña, and M. Guadayol, "Gain scheduled control based on high fidelity local wind turbine models", Renewable Energy, .37, pp. 233-240, 2012. [ Links ]
[3] L. Y. Pao and K. E. Johnson, "Control of wind turbines", Control Systems, IEEE, vol. 31, pp. 44-62, 2011. DOI: 10.1109/MCS.2010.939962. [ Links ]
[4] K. Pierce, "Control method for improved energy capture below rated power", National Renewable Energy Laboratory NREL / CP-500-26322,1999. [ Links ]
[5] K. A. Stol, "Disturbance tracking control and blade load mitigation for variable-speed wind turbines", Journal of Solar Energy Engineering, vol. 125, p. 396, 2003. DOI: 10.1115/1.1628678. [ Links ]
[6] W. E. Leithead and B. Connor, "Control of variable speed wind turbines: Design task", International Journal of Control, vol. 73, pp. 1189-1212, 2000. DOI: 10.1080/002071700417849. [ Links ]
[7] H. Vihriálá, R. Perálá, P. Mákilá, and L. Soderlund, "A gearless wind power drive: Part 2: Performance of control system", in European Wind Energy Conference, Copenhagen, Denmark, 2001, pp. 1090-1093. [ Links ]
[8] B. Boukhezzar and H. Siguerdidjane, "Nonlinear control of a variable-speed wind turbine using a two-mass model", IEEE Transactions on Energy Conversion, vol. 26, pp. 149-162, 2011. DOI: 10.1109/TEC.2010.2090155. [ Links ]
[9] C. Evangelista, P. Puleston, F. Valenciaga, and L. M. Fridman, "Lyapunov-designed super-twisting sliding mode control for wind energy conversion optimization", IEEE Transactions on Industrial Electronics, vol. 60, pp. 538-545, 2013. DOI: 10.1109/TIE.2012.2188256. [ Links ]
[10] E. Iyasere, M. Salah, D. Dawson, J. Wagner, and E. Tatlicioglu, "Optimum seeking-based non-linear controller to maximise energy capture in a variable speed wind turbine", IET Control Theory & Applications, vol. 6, p. 526, 2012. DOI: 10.1049/iet-cta.2010.0689. [ Links ]
[11] G. Zhiqiang, "Active disturbance rejection control: a paradigm shift in feedback control system design", in American Control Conference, p. 7. [ Links ]
[12] H. Coral-Enríquez, J. Cortés-Romero, and G. A. Ramos, "Robust active d isturbance rejection control approach to maximize energy capture in variable-speed wind turbines", Mathematical Problems in Engineering, vol. 2013, Article ID 396740, 12 pages, 2013. DOI: 10.1155/2013/396740. [ Links ]
[13] M. Fliess, R. Márquez, and E. Delaleau, «State feedbacks without asymptotic observers and generalized PID regulators*, Nonlinear Control in the Year 2000. vol. 258, A. Isidori, F. Lamnabhi-Lagarrigue, and W. Respondek, Eds. Springer Berlin / Heidelberg, pp. 367-384, 2000. [ Links ]
[14] M. Fliess, R. Márquez, E. Delaleau, and H. Sira-Ramírez, «Correcteurs proportionnels-intégraux généralisés», ESAIM: Control, Optimisation and Calculus of Variations, vol. 7, pp. 23-41, 2002. DOI: 10.1051/cocv:2002002. [ Links ]
[15] H. Sira-Ramírez, A. Luviano-Juárez, and J. Cortés-Romero, "Control lineal robusto de sistemas no lineales diferencialmente planos", Revista Iberoamericana de Automática e Informática Industrial RIAI, vol. 8, pp. 14-28, 2011. DOI: 10.4995/RIAI.2011.01.04. [ Links ]
[16] H. Sira-Ramírez, F. González-Montañez, J. Cortés-Romero, and A. Luviano-Juarez, "A disturbance rejection approach for the induction motor through observer based generalized PI control", in American Control Conference, Fairmont Queen Elizabeth, Montréal, Canada, 2012. [ Links ]
[17] R. Morales, V. Feliu, and V. Jaramillo, "Position control of very lightweight single-link flexible arms with large payload variations by using disturbance observers", Robotics and Autonomous Systems, vol. 60, pp. 532-547, 2012. DOI:10.1016/j.robot.2011.11.016. [ Links ]
[18] H. Sira-Ramírez, A. Luviano-Juárez, and J. Cortés-Romero, "Flatness-based linear output feedback control for disturbance rejection and tracking tasks on a Chua's circuit", International Journal of Control, vol. 85, pp. 594-602, 2012.DOI: 10.1080/00207179.2012.660196. [ Links ]
[19] H. Sira-Ramírez, A. Luviano-Juárez, and J. Cortés-Romero, "Robust input-output sliding mode control of the buck converter," Control Engineering Practice, vol. 21, pp. 671-678, 2013. DOI:10.1016/j.conengprac.2012.03.008. [ Links ]
[20] A. R. Ramirez-Lopez, N. Visairo-Cruz, C. A. Nuñez-Gutierrez, J. J. Lira-Perez, and H. Sira-Ramírez, "Input-output linearization and generalized PI control of a single-phase active multilevel rectifier", in Electrical Engineering Computing Science and Automatic Control (CCE), 2010 7th International Conference on, 2010, pp. 22-27. [ Links ]
[21] J. Lira, N. Visairo, C. Nunez, A. Ramirez, and H. Sira-Ramirez, «A robust nonlinear control scheme for a sag compensator active multilevel rectifier without sag detection algorithm*,Power Electronics, IEEE Transactions on, vol. 27, pp. 3576-3583, 2012. [ Links ]
[22] P. F. Odgaard, J. Stoustrup, and M. Kinnaert, "Fault tolerant control of wind turbines a Benchmark model", in Proceedings of the 7th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes, Barcelona, Spain, 2009, pp. 155-160. [ Links ]
[23] J. Laks, L. Pao, A. Wright, N. Kelley, and B. Jonkman, "The use of preview wind measurements for blade pitch control", Mechatronics, vol. 21, pp. 668-681, 2011. DOI: 10.1016/j.mechatronics.2011.02.003. [ Links ]
[24] F. Dunne, L. Y. Pao, A. D. Wright, B. Jonkman, and N. Kelley, "Adding feedforward blade pitch control to standard feedback controllers for load mitigation in wind turbines", Mechatronics, vol. 21, pp. 682-690, 2011. DOI: 10.1016/j.mechatronics.2011.02.011. [ Links ]
[25] A. Luviano-Juarez, J. Cortes-Romero, and H. Sira-Ramirez, "Synchronization of chaotic oscillators by means of generalized proportional integral observers", International Journal of Bifurcation and Chaos, vol. 20, pp. 1509-1517, 2010. DOI: 10.1142/S0218127410026654. [ Links ]
[26] R. Middleton, G. Stefan, A. N. Anders, and S. Jeff, "Design methods," The Control Handbook, Second Edition, CRC Press, pp. 19-1-19-35, 2010. DOI 10.1201/b10383-25. [ Links ]
[27] S. Skogestad and I. Postlethwaite, Multivariable feedback control: analysis and design, 2nd ed. Hoboken, NJ: John Wiley, 2005. [ Links ]
[28] H. K. Khalil, Nonlinear systems, 3rd ed. Upper Saddle River, N.J.: Prentice Hall, 2002. [ Links ]
