Serviços Personalizados
Journal
Artigo
 Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Desarrollo
versão impressa ISSN 0122-3461
Ing. Desarro. vol.32 no.2 Barranquilla jul./dez. 2014
Anthropomorphic robotic hands: a review
Manos roboticas antropomorficas: una revision
Erika Nathalia Gama Melo*
gav@unimilitar.edu.co
*Universidad Militar Nueva Granada, Joven investigadora grupo de investigation GAV, Bogota, D. C. (Colombia). Ingeniera en Mecatronica, Universidad Militar Nueva Granada.
Oscar Fernando Aviles Sanchez**
oscar.aviles@unimilitar.edu.co
**Ph.D. Universidad Militar Nueva Granada, director del Programa de Ingenierla Mecatronica, Bogota, D. C. (Colombia). Ph. D. en Ingenie-rla Mecanica, Universidade Estadual de Campinas (Brasil), con enfasis en Bioingenierla, Modelado de Sistemas Biologicos y Robotica.
Darlo Amaya Hurtado***
dario.amaya@unimilitar.edu.co
***Universidad Militar Nueva Granada, docente tiempo completo del Programa de Ingenierla Mecatronica, Bogota, D. C. (Colombia). Ph.D. en Ingenierla Mecanica, Universidade Estadual de Campinas (Brasil), con en-fasis en Control.
Universidad Militar Nueva Granada (Colombia)
Correspondencia: Erika Nathalia Gama Melo: carrera 11 n° 101-80, Bogota, D. C. (Colombia). Telefono 7480333, Ext. 6002.
Abstract
This paper presents a review on main topic regarding to anthropomorphic robotic hands developed in the last years, taking into account the more important mechatronics designs submit on the literature, and making a comparison between them. The next chapters deepen on level of anthropomorphism and dexterity in advanced actuated hands and upper limbs prostheses, as well as a brief overview on issues such as grasping, transmission mechanisms, sensory and actuator system, and also a short introduction on under-actuated robotic hands is reported.
Keywords: anthropomorphism, dexterous robotic hand, humanoid robotics, underactuated robotic hand.
Resumen
Este artículo presenta una revisión de los principales desarrollos que se han hecho en los últimos años en manos robóticas antropomórficas. Las primeras secciones tratan temas como el grado de antropomorfismo y de destreza en las manos robóticas más avanzadas, incluyendo una comparación entre ellas. También se abordan temas como la capacidad de agarre de los efectores finales, los mecanismos de trasmisión, el sistema actuador y sensórico, y se hace una breve introducción al tema de manos robóticas subactuadas.
Palabras clave: antropomorfismo, roboticahumanoide, manos roboticas y diestras, manos roboticas subactuadas.
1. INTRODUCTION
The growing interest in robotic hands development has had fairly relevance in the last years, due to the wide applications ground; such as pick-and-placed, upper limbs prosthesis [1], as well as flexible automation of many manufacturing tasks and automates assembly duties [2]. Current industrial developments are mainly limited to specific purpose grippers and tools that are insufficient when the robot has to deal with any shape and size objects. In order to achieve the above applications, adopting the human hand design seems to be an adequate solution, since the human hand is the most sophisticated and complex outer extremity on human body [3] and a millenary evolution result [4]. Therefore, robotic hands with a high level of anthropomorphism is a desirable goal in final effectors design, due to anthropomorphic hands allows using robotic hands like prosthesis, operate in man-oriented environments, and also be tele-operated by humans though interfaces that can reproduce the operator hand behavior [5]. Despite the wide research field that has been developed and exposed on the literature, as well as the advances made in design, control and sensory, there are still issues to be solved or need more improving on robotic hands. An index to measure the robotic hand capability is termed "dexterity" [7]; a dexterous robotic hand has certain characteristics that make them a desirable design. However, robotic hand dexterity could be not only affected but also wasted with an inappropriate sensory and actuator system and no advance control procedures [5], and also present typical problems related to multi-fingered hands kinematic, transmission systems, among others. Many solutions have been proposed and developed about improving actuator system; pneumatic flexible fingers are used mostly because they don't need any external actuator [4]. Also, the most complex devices use articulated fingers actuated by electrical motors and tendon transmission. Non-conventional actuators have been developed and they have become a good alternative to typical actuators use [34]. The improvement in sensory and the accomplishment of new techniques in actuator system in recent years, permit the implementation of under-actuated robotic hands [8], that compare to a typical robotic hand has better features such as self-adaptive grasping and allowing applying easy control techniques, and also a better dexterity index [9].
The aim of this work is thoroughly review the current state of the art on the main topics related to robotic hands development that can define its degree of advantage and evenly, to introduce a clear comparison of the mainly robot hands presented in the literature [7]. In addition, show the dexterous hands connection with items such as anthropomorphism, mechanism design, grasping analysis, sensory and actuators equipment and lastly control techniques. Finally, submit an overview of under-actuated hands, and its advantages over traditional humanoid robot hands.
2. ANTHROPOMORPHISM IN ROBOTIC HANDS
One of the important topics in robotic field is concerning to human design influence in robotic devices development. A demonstration of this is the human hand features reproduction in grippers and end-effectors, a topic that has been widely developed and carried out in a huge number of applications. An overview on robotic hands evolution since its inceptions is illustrated in [5] and [7]. In this chapter a comparison of features in the most significant robotic hands currently available is presented. Also, an analysis of the main characteristics that define an anthropomorphic robotic hand will be summarized.
The term Anthropomorphism refers to the capability of a device to mimic the human hand general aspects, such as shape, size, consistency, color, temperature and aesthetic factors. It is not an unknown fact that frequently many robotic hands with a very high degree of resemblance with the human hand but with wide functional limitations and a poor dexterity level could be found. Otherwise, there are hands with a huge manipulation possibility although with a decrease resemblance with a human hand. That means that anthropomorphism is not necessary in order to achieve dexterity in a robotic hand. However, there are others reasons to prefer an anthropomorphic design in end-effectors. They are related to the specific applications of the end-effectors like prosthesis and rehabilitation task, or the environment where the device is going to work, for instance, it can operate on a man-oriented environment and also it can be tele-operated by a man. Besides, the relationship between robot and human being; for example, service robots should operate in places that are designed for human hand [10]. The human hand owns unique features that make it able to hold a large variety of object shapes and coordinate an infinite movement's variety [11]. Thus, anthropomorphism in the design of an artificial hand enables the robot to interact correctly with the environment, between more advantages.
Characteristics of the human hand
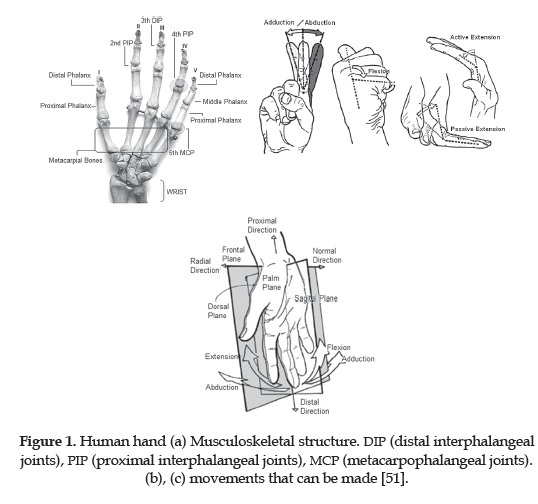
The anatomical hand is connected to the wrist through the palm, has 27 major bones (eight carpals, five metacarpals and the phalanges), and at least 18 joint articulations with 26 degrees of freedom (DoF) driven by about forty muscles [12], grasps that involve all hand fingers can exert up to about 400N of force [13]. Each finger consists of a proximal, middle, and distal phalanx, and the thumb has a proximal and distal phalanges. Each of the joints of the fingers exhibits flexion and extension, but only the proximal phalanges exhibit abduction and adduction. The thumb which has the most complex structure exhibits flexion/extension, abduction/ adduction, and also rotation around the axis of the metacarpal joint on the metacarpal phalange [21]. The human hand musculoskeletal structure and its movements are shown in figure. 1.
The human hand biomechanical study allows the design of anthropomorphic robotic hands and prosthetic aids [14], [15]. Also, a biomechanical analysis enables have an idea about how to carry a device as complex as human hand in terms that it can be reproduced in a final-effector, combining robotic principles, anthropometry data that has been obtained to previous studies, and making certain assumptions that allow to reduce the complexity level existent in the human hand [16].
Anthropomorphism Index
Although anthropomorphism in end-effectors do not guarantee a high dexterity level, these two concepts are actually broadly related. Anthropomorphism and dexterity indices evaluate human hand features and determine the degree of closeness in which a generic gripper is in comparison with human hand dexterity.
The aspects that define the anthropomorphic level in a robotic hand are [5]: (a) The presence of the main hand morphological elements like opposite-thumb, amount of phalanges and the palm. (b) The way in which contact is made with objects over the entire hand surface. (c) The robotic hand size resemblance with the human hand real size and the correct size ratio between all the hand links. At the same time, those aspects take in consideration more specific features that are very important when a robotic hand is classified, and they permit to evaluate each robotic hand anthropomorphism level. These are shown in figure 2.
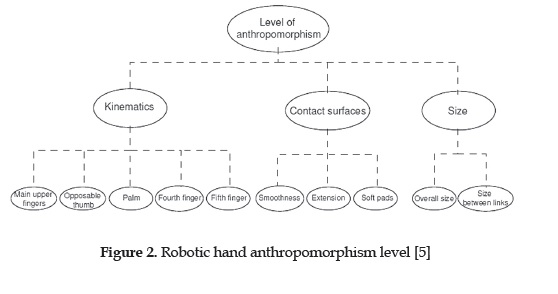
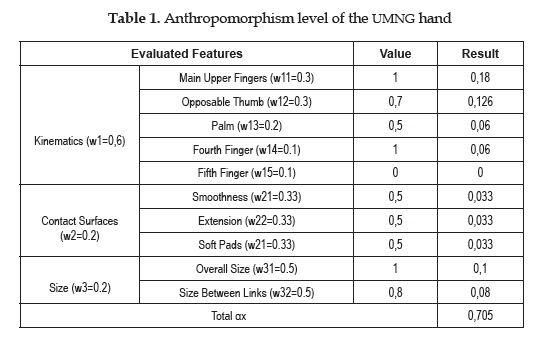
Each one of them has a specific relevance in order to reach the human hand anthropomorphism. Robotic hand anthropomorphism index can be calculated as the sum of each aspects weight, taking into account that human hand anthropomorphism index is. Table 1 shows the anthropomorphism level evaluation for UMNG hand [18]. On the literature, several robotic hands are found with different degree of anthropomorphism and dexterity; the next section brings an overview of the most significant hands available, considering their mechanical design, adopted sensory system and control architecture too.
Overview on anthropomorphic robotic hands
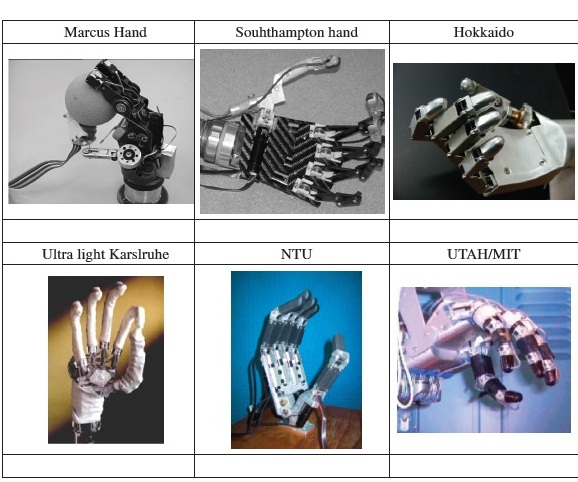
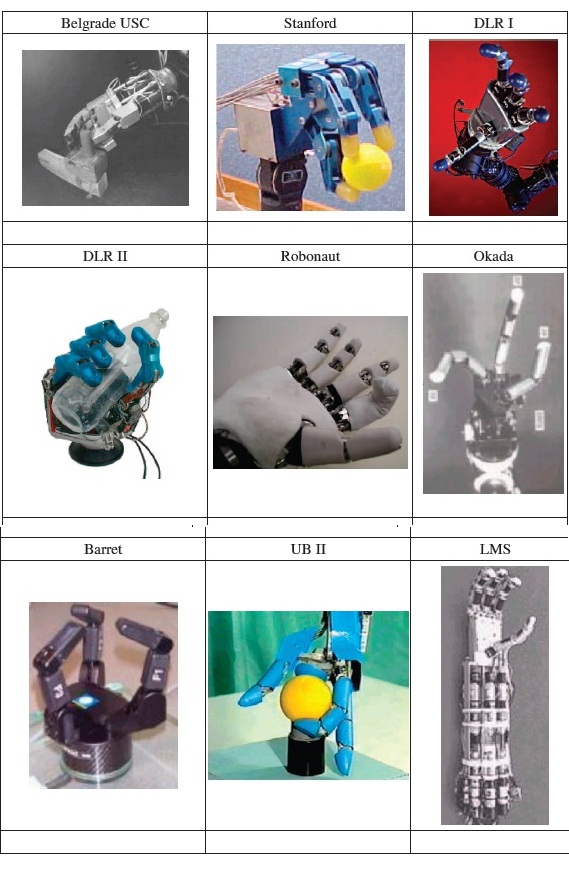
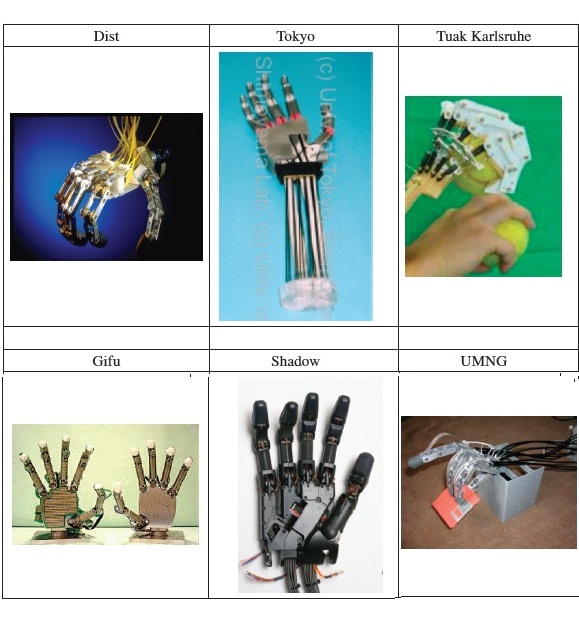
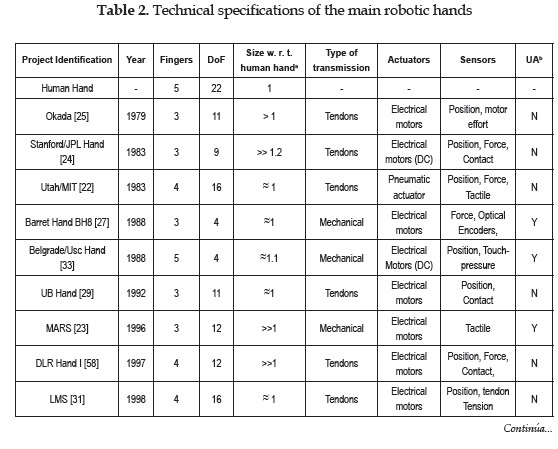
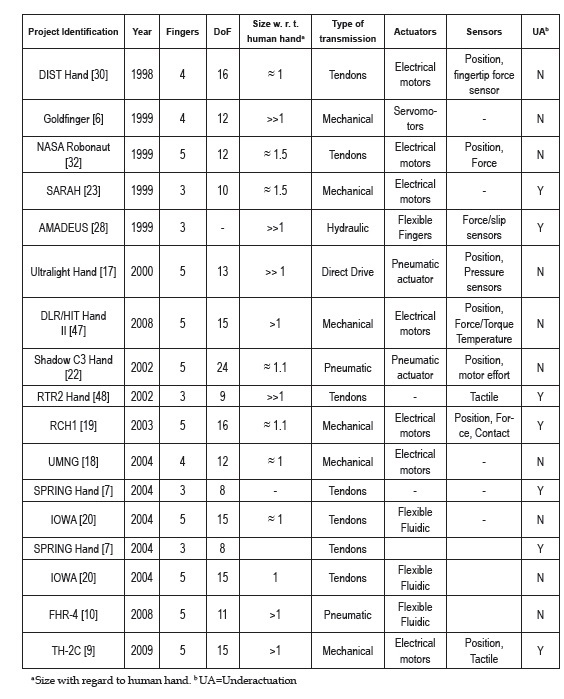
There are several aspects that must be taken into account to make a suitable robotic hands development revision. The robotic hand's level of advance and the specific application of each anthropomorphic gripper, make it difficult to claim which project is better than other. A majority of outstanding mechanical hands have been developed since the beginning of 1980s. It is possible to witness how the anthropomorphism degree has increased as well as dexterity in the current devices. Table 2 shows a resume of the main robotic hands technical specifications and at the same time compare them with the human hand features: the model to follow. Between the earlier designs are included: the Utah/MIT [22], the Stanford/JPL (Salisbury's) [24], the Okada hand [25] and several others. In the late 80s, projects such as Barret Hand and Belgrade/Usc Hand [27] were based on the approach that consist in reducing the actuators number on the hand and reducing the complexity, but without affecting the hands versatility and, therefore, introducing the term "Underactuated" in the robotic end-effector design, it is going to be explain in next chapters.
Afterward, DRL Hand I and DRL hand II [47] were designed like an independent and modular device that can be used in any kind of arm. In the last ten years, efforts like Ultralight Hand [17], TH-2C [9], RCH1[19], and MARS Hand [23] have applied the improve made in sensory, mechanical design and control issues, becoming more like human hands, with highly qualities and being able to carry out a wide variety of tasks. Anthropomorphism and dexterity are orthogonal concepts; every day, the idea to achieve a robotic hand with high level of anthropomorphism and high level of dexterity without obtaining one of those characteristics imply to renounce to the other one, is nearer a reality.
3. GRASPING ANALYSIS
The primary role of the human hand itself is grasping and manipulation. In a robotic hand, grasping can be defined as the combination of procedures and operations that must be developed to hold an object within the hand [1]. One of the dexterous robotics hand's challenges is achieve a design capable of carrying out a powerful hold, as well as having fine manipulative skills and versatility [38]. The Stanford/Usc Hand is one of the most advanced hands in clutching and manipulation concerns because it can impart small and precise movement to an object using the fingers [24]. In [39] a division in four fundamental steps of a robotic hand's manipulation task is presented. See figure 3.
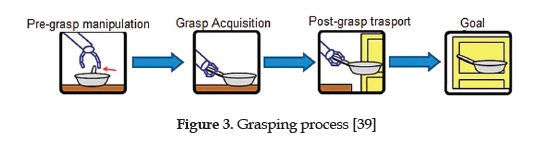
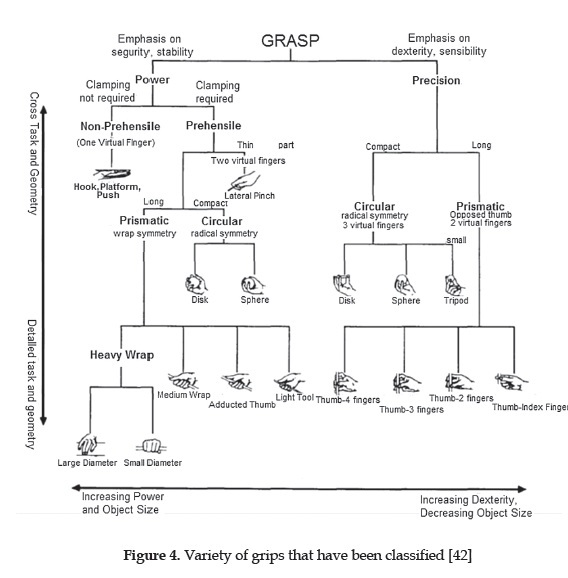
The pre-grasp is the initial pattern in which the arm/hand system is placed to start the contact with the object to be achieved. The grasp per se is the second phase where the hand makes contact with the object; here, it is possible to alter the initial position of the object, even break it, when the force and motion control algorithms are not suitable. The third phase, Post-grasp transport, is performed after the object is grasped and stabled, and it consists on moving the object from one position to another, taking into account possible colliding with external obstacles. The final step is achieved when the object is placed in the desired position, which requests robust and reactive position/force control strategies. It is possible to notice that suitable control strategies are an essential subject in order to develop a desirable assembly task [49]. The most significant step regarding to end-effector mechanical design, actuator and sensory system is the grasp. Figure 4 shows the main grasp classification based in anatomical and functional patterns: power grasping and precision grasping. At the same time in [40], hand movements are classified assume the hand as an entire device, and divides its motion on two main groups; prehensile movements, in which an object is held within the extent of the hand as a whole or by the digits individually; and the non-prehensile movements, in which an object is just kept in the hand but there is no grasping involved. Two additional grasp mode taxonomies are described in [38], one of them is based on the connectivity between robot hand and the object. Also, it is possible to classify the grasp on eight types according to the object's geometric, which are: power grasp, span grasp, cylindrical grasp, chuck grasp, hook grip, lateral pinch, pulp pinch and precision pinch.
Stability of the grasp is a measure of how well the object is constrained, and it is directly related to the contacts between fingers and the object. It is possible to notice different types of contacts between the hand and the object: point contacts (fingertips), line contacts, soft-finger contacts and hard-finger contacts. In the hard-finger contact each finger can transmit force to the object but it cannot transmit torque [26], [41]. Based on this types of contacts classification, it is possible also define the kind of grasp that is made; for instance, the Precision Grasping uses three non-collinear point contacts to restrain the object. The ability to adjust the grasping posture to obtain the proper contact with the object is termed adaptive grasp, and it is a dexterous robotic hand feature that is directly related to sensory system, since an adaptive design can only be applied on fingers with tactile recognition. In [46] an overview of haptic sensory behavior during certain grasp actions based on cutaneous sensory values is reported. It is possible to obtain better grasping in a bionic hand no matter the object shape that is being sharped. The repetitive grasp generates similar results in the tactile sensors with several objects with the same shape; it allows the hand adapts its morphology to achieve grasping more stable to a determined object.
4. DEXTERITY IN ROBOTIC HANDS
Robotic hand dexterity is defined as its skill to perform highly precise operations with, for instance, visual, perceptual and tactile feedback [7]. Therefore, when "dexterity" term is used in robotics and specifically in robotics hands, it is related to functionality and autonomously performed tasks with certain complexity level [5]. The main difference between a traditional robotic hand and a dexterous robotic hand is that in the second case the manipulation is object-centered [43], and this kind of manipulation requires precise motion and force control that cannot be achieved with a generic robotic gripper, but with a multi-finger device can. In fact, a dexterous hand must be able to adapt itself to different kind of task and grasping, without suffers any change in its structure and control, just the way human hand does. Nevertheless, in comparison to human hand, a dexterous robotic hand has a wide limitation related to versatility and performance. The last efforts made in this field have been addressed towards overcoming this limitation. High dexterity is usually a synonym of complexity; one of the challenges is achieve a dexterous robotic hand without having to deal with wide complex mechanical system and control strategies.
In [3] the implementation of a dexterous hand with a potential use as a prosthetic is presented, which is an interesting and practical background for dexterous hands development. One of the most important and researched goals is related to gripper system development which is able to act as a multipurpose device for daily necessities, and is compromised with human hand's main features, such as degrees of freedom, shape, kinematics size, and weight. From the mechanical structure and sensory system influence on robotic hand dexterity, two terms that are used as a final dexterity measure of the hand can be inferred, and they are directly dependent on intrinsic hand properties: Potential dexterity given by the mechanical structure and Potential dexterity related to the sensory system. They are termed 'potential' since they depend on many other hand characteristics. That means, mechanical structure brings a certain dexterity level that can be high, but whether the sensory system and the control architecture are not suitable, the impact of dexterity given by mechanical structure in gripper final performance will be little, and it will end being wasted. Potential dexterity given by mechanical structure values topics such as robotic hand grasping capability (either fingertip or whole hand) and also internal object manipulation. At the same time, this kind of dexterity takes into account DoFs, types of contacts between gripper-object, and the amount of each finger joints, among others.
Therefore, robotic hand final dexterity depends completely on potential dexterity of each component; for instance, the potential dexterity given by mechanical structure, or by sensory system, taking into account that each component influence level is not the same because there are some factors that affect more than others. For example, the robotic hand control system could determine which of the potential dexterous skills provided by the mechanical system and sensory system can be exploited [44]. Potential dexterity given by sensory system has a special importance because one of the key points of human dexterity is cutaneous information richness, like high-frequencies vibrations, small scale shape, pressure distribution, thermal properties, accelerations and dynamic force, among others [5]. Unfortunately, current technologies are still far to obtain touch sensations through transducers set up in biological models. While some authors propose that the main lack for dexterity is the sensory system [5], [43], others claim that actuation technologies are still a major impediment to obtain compact and reliable solutions [1], [44]. Some of the most common robotic dexterous hand applications can be tasks which are dangerous to perform for humans or where it is required fine manipulation and preciseness.
5. MECHANICAL DESIGN
According to the human hand analysis made in the last chapters, the principal features take into account in a robotic device design and construction are: degrees of freedom (DoF), kind of grasp that can be made, type of sensors that are implemented, type of source of energy, size and weight, etc. Mainly, those aspects can be gathered in five categories to consider: mechanism, sensors, actuators, control and human-machine interface.
Elements like sensors, actuators and mechanism can be evaluated by following features: size, weight, flexibility, precision, hysteresis, energy consumption, potency, efficiency, and components cost. An important part of certain mechanical design implementation is related to the kind of task that is going to be developed. As it was shown in previous chapters, when task demands a high degree of ability, it will be suitable to implement a dexterous robotic hand. Otherwise, if it is looking for accomplish easy tasks with higher velocity and lower capability of manipulation; it is most pertinent to implement a gripper that requires a simpler mechanical design than a robotic hand, with less DoF, sensors and actuators that can perform the desirable task. Therefore, robotic hand mechanical design comes up of the close connection between actuators, sensors and transmission mechanism. Any of this aspects could be chosen without consider the other two, since they are intimately related and each one depends on the others. For instance, depending on actuator type that is used the transmission mechanism will be designed. Hence, robotic hand design is a whole task that requires interaction of certain components that are explaining in next sections.
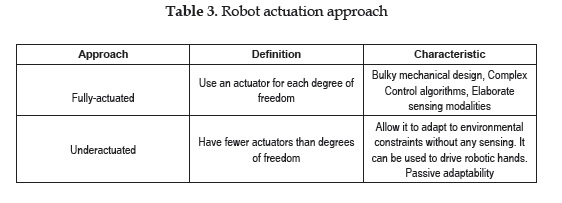
Properly talking about mechanical design, the evaluation criteria regarding mechanical design implementation are: DoF, kinematics, number of actuators and sensors, and the power of the actuators [3]. According to [7], robotic hand mechanical design can be categorized in three classes according to their DoF and actuators number as following: Fully actuated mechanisms (equal number of DoF than actuators), redundantly actuated mechanism (more actuators than DoF) and underactuatedmechanism (more DoF than actuators). As a matter of a fact, a redundantly actuator mechanism is neither desired nor useful in the development. The others two approaches that are claimed in the literature are resumed in table 3.
Transmission mechanisms
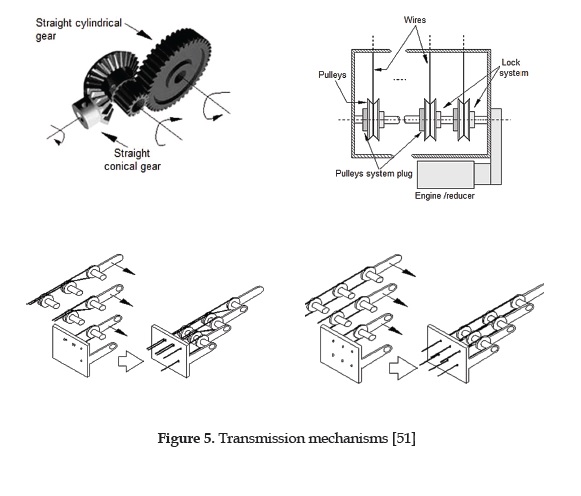
Robotic device's mechanical design should be as simple and reliable as possible, in order to be used in common activities in daily life when is the case of prosthesis development, or also in industrial applications. A high number of DoF is desirable in order to obtain a greater dexterity, but it should be obtained without increasing the complexity on the human-machine interface or the control system request. Besides, the system ought to allow a mechanical lock, with the aim to save energy through the entire grasping. Once the desired force level is reached, the energy supply in the engines is shorter, but the grasping keeps stable. The main transmission mechanisms are shown in figure 5. Currently, some kinds of transmission mechanisms have been reported in the literature as follow:
Multiple Transmission mechanism (MT)
It consist on cables driving through pulleys, all at the same time, or independently each other, allowing movement of each link in a robotic finger. MT includes an engine coupled to a gear, a shaft-coupling system and a pulley block system. The pulleys are connected to the gearmotor outlet shaft, but uncoupled from this shaft; the coupling system is responsible of the join between the pulley and the shaft, and allowing cables outline gearmotor. After robotic finger's link has been placed, locking system maintains link position attaches to the pulley, allowing the shaft free movement. In inverse movement, the locking system releases the pulley and the link moves back to other desired position because of a spring force.
Differential Mechanisms
It is an important class of mechanism used in underactuation. It provides two outputs for one input. Hence, it is necessary to connect them in order to achieve n DoF [7].
The slider crank mechanism
It comprises a mechanism driven by a linear actuator, where its movement is used to directly drive the robotic finger joints with multiple phalanges. In the finger shown in [51], metatarsophalangeal joint and proximal in-terphalangeal joint own a linear actuator and a slider crank mechanism, while in distal joint the driven power is transmitted through a link. Some examples of mechanisms that were named are shown in robotics hand that was included in table 2. The RTR2 hand includes a movable pulley as transmission mechanism; the SARAH Hand uses planetary gear technique and the Belgrade Hand works with a connect seesaw circuit; in the pneumatic hands a T-pipe connect circuit is used, among others. Next sections will deepen in underactuation in robotic hands and how it is involved with its mechanical design. Figure 5 shows some of transmission mechanisms that are used in robotic fingers.
Underactuated robotic hands
An anthropomorphic robotic hand requires actuators and transition system with a high complexity level to support its operation. The underactuation concept becomes a possible solution to obtain dexterous robotics hands without such complex mechanical design. The principal characteristic on underactuated robotic hand is that the actuators number needed to operate the hand is fewer than its DoFs. This kind of mechanical intelligence is embedded into the hand design through the use of passive elements (elastic elements) combined with transmission system, allowing fingers shape adaptation, hence named Shape Adaptive Hands.
They are capable to distribute actuation torque to a large contact surface which allows secure grasp with delicate handling combination [23]. Shape Adaptive Hands provides robot with ability to apply forces on the object from multiple contact points and potentially improving grasp stability. The suitable behavior of an underactuated system specially depends on location and amount of actuators that are used in certain link chain [50]. In this case, the actuator's localization in an underactuated finger will influence the position and amount of contact point that are between fingertip and target and the way that it reaches the object and produces movement. This issue is an important topic in underactuated fingers design.
Besides, it is possible to distinguish between two different kinds of unde-ractuation: one in the fingers and another between them [7]. The RTR2 Hand owns these two kinds of underactuation; in the underactuation between the fingers a similar technique to movable pulleys is used. The mechanisms that are used to obtain underactuation in the fingers are exposed following.
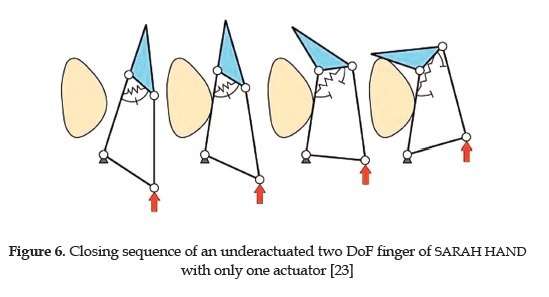
Linkage-driven Mechanism
It is the most common mechanism, shown in figure 6. The linkage mechanism allows all fingers phalanges manipulation using springs and mechanical limits. When proximal phalanx is in contact with the target, automatically a spring that moves distal phalanx is activate because of mechanical limit between the object and the finger, until distal phalanx reaches the object and the grasp is complete. Note that two DoFs only required one force that is represented by the arrow in the bottom [23].
Cable-driven mechanism
Also called tendon-pulley mechanism, it is maybe the first modern type of mechanism for underactuated finger. Through these, it is possible even to obtain that distal phalanx moves after proximal phalanx and makes contact with the object; this is a mechanism adaptability property [50]. The pulleys and the respective phalanx joints share the same axis. In order to make the finger underactuated, the pulleys can freely rotate around their axes without transmitting this rotation to the phalanx. This mechanism can be very effective for small forces, and with appropriate control, can compensate elasticity and friction; is useful for instance, for lightweight prosthesis devices. There are other mechanisms like Double-Stage Mechanism, which is a modified version of linkage-driven mechanism, but with two consecutive phalanges fusing into a single one. A different mechanism based on gears can be also used instead of tendons to drive robotic finger links.
6. SENSOR SYSTEM
A dexterous robotic hand must be dotted by sensors that can measure internal parameters like position and velocity in the joints, and external parameters like temperature, humidity and surface roughness. The behavior of this kind of sensors must be similar to human sensory system. In this section, a brief description of the main kind of sensor used in robotic hand is reported. Sensors that are adopted in a robot are related to the specific applications of the hand, and also depend on the environment conditions in where the robotic hand is going to operate. For instance an intelligent robotic hand for underwater environment could have four kinds of sensors: force sensors, image sensors, ultrasonic sensor and hall sensors [48]. Sensor system must work parallel with control system; information obtains to force and others sensors provides the feedback information from the hardware back to control software [43]. According with the type of sensing information, sensors can be classified in two categories: proprioceptive and exteroceptive Sensors [56]. Proprioceptive Sensors can measure physical information related to current device state. For instance, position, velocity, angle, among others. The main problem to measure position and velocity in a robotic hand is related to space limitations to place sensor and wires. A common choice to overcome this limitation is using Hall-effect sensor and encoders in case of remote actuation. They are small, precise and reliable. An alternative to measure joint torque is through strain gain placed in robotic hand. Extero-ceptive Sensors are able to measure data provide to robot interaction with objects and environment, such as force, shape, pressure, friction, applied force/toque, and temperature, among others. Also they are often necessary to overcome the nonlinearities introduced by transmission system, as well as to carry out grasping. Exteroceptive sensors include a very important kind of sensors in robotic hands, tactile sensors, which emulate the skin characteristics.
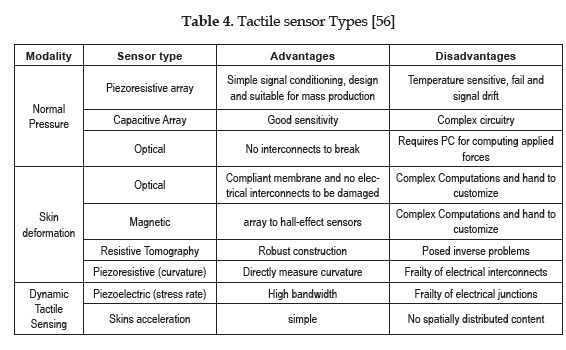
The skin is the biggest organ in the human body, and for human hand, it is responsible for the majority of data acquired through thousands of mechano-receptors per square centimeter, In humans, tactile sensing is indispensable for three distinct kinds of activities: manipulation, exploration, and response; sophisticated tactile sensors are needed to tackle manipulation problems with small objects and for setting grip forces correctly or fine-grained handling. With the aim of match the human hand huge power and its sensory system, a wide variety of sensors have been produced. Tactile sensors are defined as a device that can measure a property of an object or contact event through physical contact between the sensor and the object" [58]. A brief resume of main tactile sensors in presented in table 4. In [58] is presented a novel tactile sensor design, based on piezo-resistive soft material and a crossed-wire approach. Another specific example is exposed in [57], where a fully integrated tactile and 3-axis force sensor system is reported. The tactile sensor could be a matrix of 64-electrodes covered by a layer of pressure sensitive conductive rubber. Pressure due to contacts produces resistance changes among the electrodes. In [45] a special emphasis in sensor system integration with control system is reported in a non-anthropomorphic hand. The authors develop a tactile sensor device that combines its performance with imagine processing technique that allows force detection in tri-axial directions, detecting normal and shear force distribution with high accuracy. Despite the move forward of the last years in sensor system in all robotic field, there are still problems with, for instance the difficult integration of tactile sensors with existing robotic hardware and tactile sensors materials that should be even similar to soft and flexible skin.
7. ACTUATOR SYSTEM
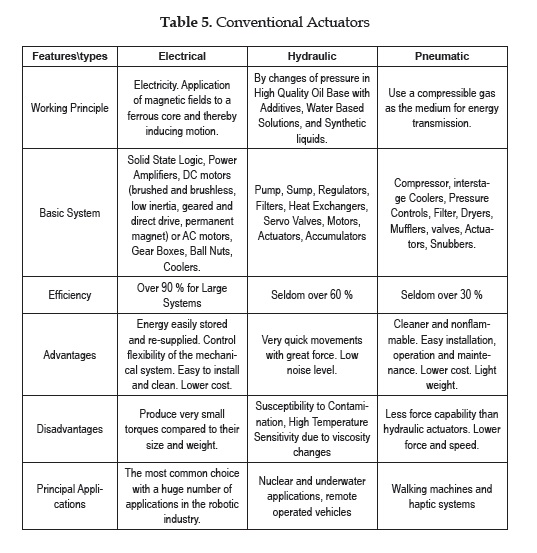
An actuator system could be defined as an entire devices integration that allows robotic hand joints movement. In accordance with the anatomical concepts, the human hand mechanism holds a majority of his muscles in the forearm transmitting the movement through tendons. This is the principle to infer that an actuator could be placed far from the joints. Also, this concept is related to the fact that movement generators such as motors are frequently too big to be integrated in the corresponding finger joint directly. Hence, different methods are necessary to forward the movement from the generator to the finger joint; not only tendons, but also drive belts or flexible shafts are employed [44]. The main disadvantages are: robustness reduction, lack of precision, complications on the control system because fingers joints that are mechanically coupled have to be uncoupled in software. One of the goals of this paper is describe non-conventional actuator available and review conventional actuators features. An actuator or transducer is an element that converts a kind of energy (electric, hydraulic, pneumatic) to linear or rotational movement and force in a robotic system. Different types of actuators have been used as input motion and force sources. These can be classified in conventional or non-conventional actuators, according to their operating principle of motion generation [35]. Electric, hydraulic and pneumatic actuators are called "conventional" because they are used by several robotic device and mechanical systems. Each of these types of actuators has certain advantages and disadvantages that are resumed in table 5 [36].
Non-conventional actuators
There are a lot of different types of actuators that are not based in mechanical motion and involve the reduction of size, weight and complexity of the actuator system. Among them, actuators that use piezoelectric effect have a high weight/power relative; they reduce size and produce high output torque in comparison to electric motors. The main disadvantage is that they are highly expensive. Some of non-conventional actuators have the ability to emulate biological muscles behavior, and allow implementing novel applications that were impossible to do up with conventional actuators [55]. This section makes an overview of main non-conventional actuators, presenting relevant characteristics of them and their advantages and disadvantages. Electro-Active Polymers (EAP) is a material that exhibits a large displacement, or significant size change in response to electrical stimulation, they are especially useful for biometric applications [52]. In [55], the author divided EAP materials in two mayor groups that are shown in table 6.
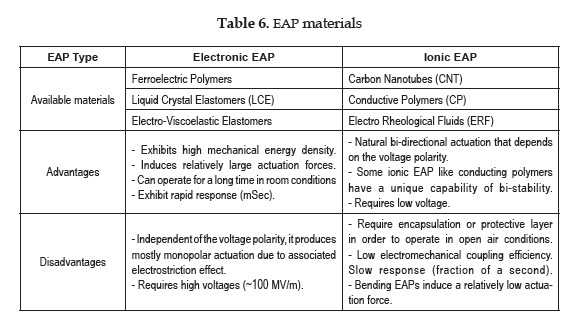
The Contractile Gel Polymer is an actuator that makes part of ionic EAP materials, which means that they are driven by diffusion of ions. This non-conventional actuator consists on a material that can be driven by chemical, electrical and thermal signals, and also it has the ability to submit abrupt volume changes that are reversible when the gel returns to its initial conditions. This is an important fact for actuator design and it would be ideal for robotic actuation because its analogy to human muscle [37]. The main disadvantage is the control of its behavior rather than optimizing the gels for performance as actuators in a robotic system. The Electro-rheological fluids (ERF) are fluids that experience dramatic changes in their rheological properties in the presence of an electric field. Rheological properties are relative to flow of fluids and deformation of solids under stresses or strains application. It is a method that are still in development, but it offers new possibilities in engineering actuation, once its main disadvantages such as large voltage necessity to produce the output forces, can be overcome. ERF also makes part of ionic EAP materials and is shown in table 6 [55]. Shape Memory Alloy Actuators (SMA) consists on a group of metallic materials that have the ability to return to previous shape and size when they are exposed to different temperatures. The SMA behavior occurs due to a stress and temperature shift of the material in its crystalline structure between two different phases called martensite (the low temperature phase) and austenite (the high temperature phase). Shape Memory Alloys can experience large macroscopic deformations while maintaining remarkable order within its microscopic structure. This actuation system consists only of SMA element and a heating and cooling method. Their main advantages are noiseless operations and reduction of size and weight. The great disadvantage is their low efficiency; also, all the issues that are related to the heat transfer like heat dissipation depending on the environment; and finally the difficulty to control SMA actuators [34].
8. CONTROL STRATEGIES
In this section a brief introduction to the various common robotic hand control methods will be outlined. One of the most relevant issues in control system is the desired controlled variable. For instance, joints angle position on the fingers, velocity of the links, or force on the grasping. Two tasks have to be complete by the robotic hand control system: position control and force control [59]. Position control's goal guarantees a minimum error in the following to the desired movement. That means to obtain the fingers joints position for each position adapted by the hand in the grasping process. These positions depend on objects shape. The classic strategies are PID and calculated torque, amply studding in the literature [59], [60], and [61]. In the moment when the robotic hand makes contact with the object to grasp, it is essential to minimize the error respect to the force that it is desired to apply to the object. In order to carry out the force control, it is necessary sensors that ensure the system feedback, as would be made by the human hand. Impedance control force strategy, allows controlling the exerted force by the robotic hand over the environment through to position adjustment [62].
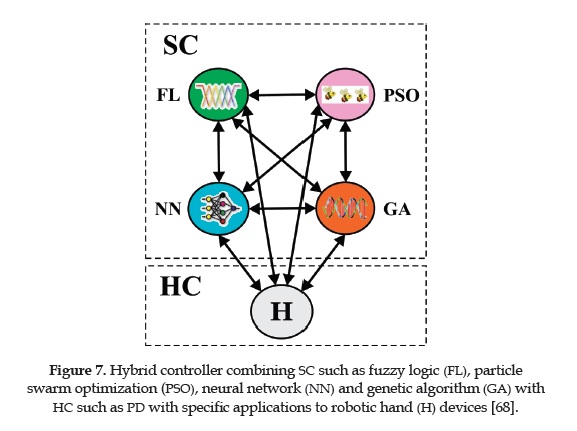
Those classic techniques as PID are known as Hard Control techniques (HC) [68]. They are composed by proportional-derivative (PD) control, proportional-integral- derivative (PID) control, multivariable feedback, optimal, nonlinear, adaptive and robust control. Also, they are used at lower level control for accuracy, precision, stability and robustness. Soft computing techniques or also known as computational intelligence (CI), allows the robotic hand to adapt to an environment under imprecision, uncertainty, partial truth and approximation [69]. CI techniques are artificial intelligence, neural networks, fuzzy logic, genetic algorithms and particle swarm optimization (PSO) [70]; they can be used at high-level control of the overall mission where human involvement and decision making is of primary importance. The SC techniques have been used in both robotic and prosthetic hands. In [71] a biomechanical model with a tendon configuration is developed of a 3 DoF finger and a fuzzy sliding mode control is proposed and applied to have the finger model to follow a certain trajectory and generate the required tendon forces during closing and opening motions. In [72] is expressed the reaction of brains to the adaptable prosthetic system for a 13-DoF electromyographic (EMG) signal controlled prosthetic hand with an EMG pattern recognition learning by artificial NN. In [68] soft control techniques and hard control techniques composes a hybrid controller for a five-finger robotic hand with 14 DoF, as is shown in figure 7.
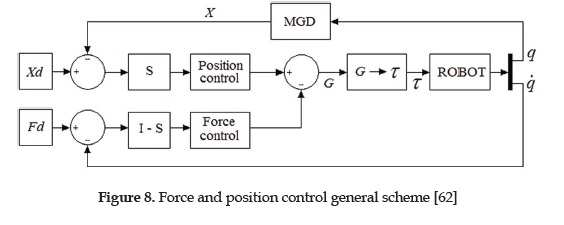
A hybrid control allows obtaining two parallel control loops, one for the fingers position and another one for the force applied for this. The outputs of these loops are added before they are sent to robot hand under the form of a control global vector (G), whose output is equivalent to two torques desired for each hand joint, one to minimize the position error, and other the minimize the force error [63]. In order to avoid discrepancy between the two control loops, a diagonal selection matrix (S) is used, as is shown in the figure 8.
When actuators are artificial muscles, make of EAP materials, the principal dilemma is related to fingertips trackingon the robotic hand, it is because of deformable properties of the material. In [52], the author raises the implementation of an artificial neural network (ANN) based in trajectories planning approach, to minimize the position error in the fingertips. The ANN is also used to identify the dynamic model for each EAP finger joint in the robotic hand; also, a cartesian controller is implemented through another neural network. In [53] a control algorithm for robotic hands without force sensors is presented.
Two controllers based on internal model control are applied to sensorless grasping control on a myoelectric tendon-driven robotic hand. Effectiveness of the proposed controllers is verified by comparative experiments. In [54], a biological inspired controller is presented to emulate even more human hand movements on the robot, based on the observations of the biological hand movement, while it covers a discontinuous surface. In this work, as control strategy was development to mimic the movements of the human hand. One again, there is not force feedback on the control strategy implementation. Among the new control strategies, a learning scheme based in sEMG signals taken in hand and arm muscles is presented in [64], classifying the grasping positions basing in the muscles activation and providing a control strategy to robotic arm-hand based in EMG. In [65], a learning scheme based on Random Forests is used to decode the EMG activity of 16 muscles of the human arm-hand system to a continuous representation of kinematics in reach-to-grasp movements in 3D space. Classification methods were used to discriminate between significantly different reach to grasp strategies, formulating a switching mechanism that may trigger the use of position and object-specific decoding models. These task-specific models can achieve better estimation results than the general models for the kinematics of different reach-to-grasp movements. In [66], a study of the EMG applications and fuzzy logic is presented to obtain information about the joints positions and muscles electric activity, in order to develop algorithms for human hand movement analysis and apply it in robotic hand prosthesis control, and also for human - maquine interaction.
In [67], the fully functional ACT Hand platform allows for the possibility to design and experiment with novel control algorithms leading to a deeper understanding of human dexterity. The authors design decentralised adaptive fuzzy control based on impedance approach for coordinated multiple mobile manipulators using Lyapunov synthesis. Rigourous stability and performance analysis have been established, and simulation are presented to figuratively demonstrate that the motion/force-tracking errors converge to zero, whereas the internal force-tracking error remains bounded and can be made arbitrarily small.
CONCLUSIONS
This paper presents an attempt to classify robotic hands according to anthropomorphism and dexterity degree that are submitted on the literature. The principal topics about design and implementation are cover and expose in a simple way. In particular, there are still far to achieve a robotic hand that can accomplish all the roles of a human hand, but a novel develops in sensory and actuator systems improve the their versatility and dexterity, making them able to performance task that are more difficult for a human. Underactuated robotic hands are reported as a good alternative to minimize complexity in mechanism systems, also non-conventional actuators are present as a novel solution for improve the level anthropomorphism and grasping quality. Certainly, there are huge improvement in actuators and sensors, but it still exist a lack in integration and control issues that need to be perk up in order to achieve more dexterous and available robotic hand. Related with the control strategies, the fusion or integration of soft control (SC) and hard control (HC) methodologies has some advantages and a superior performance compared to hard control or soft computing alone, which means that The SC and HC are potentially complementary methodologies used in the force and position control for a robotic and a prosthesis hand. The fusion could solve problems that cannot be solved satisfactorily by using either methodology alone, as well as novel synergetic combinations of SC and HC lead to high performance, robust, autonomous and costeffective solutions.
REFERENCES
[1] J. L. Pons et al., Multifingered dextrous robotics hand design and control: a review. Robotica [online], vol. 17, n° 6, pp. 661-674, June 1999. [ Links ]
[2] S. Cobos et al., "Efficient Human Hand Kinematics for Manipulation Tasks", in IEEE Int. Conf. on Intelligent Robots and Systems, Nice, 2008, pp. 2246-2251. [ Links ]
[3] R. Mahmoud et al., "Dexterous Mechanism Design for an Anthropomorphic Artificial Hand: Osaka City University Hand I", in IEEE 10th Int. Conf. on Humanoid Robotics, 2010, pp.180-185. [ Links ]
[4] T. Raparelli et al., "Design and Development of a Pneumatic Anthropomorphic Hand", J. Robotic Systems [online], vol. 17, n°1, pp. 1-15, Jan 2000. [ Links ]
[5] L. Biagiotti et al., How Far Is the Human Hand? A Review on Anthropomorphic Robotic End-effectors, 2004. [online]. Available: http://citeseerx.ist.psu.edu [ Links ]
[6] A. M. Ramos et al., "Goldfinger: A Non-Anthropomorphic, Dextrous Robot Hand", in IEEE Int. Conf. on Robotics & Automation, Detroit, 1991, pp. 913-919. [ Links ]
[7] L. Birglen et al., "Grasping vs. Manipulating" in Underactuated Robotic Hands. Berlin, Heidelberg, Germany: Springer, 2008, pp. 7-17. [ Links ]
[8] L. Wang et al., "A highly-underactuated robotic hand with force and joint angle sensors", in IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2011, pp.1380-1385. [ Links ]
[9] S. Tan et al., "Design and Analysis of Underactuated Humanoid Robotic Hand Based on Slip Block-Cam Mechanism", in IEEE Int. Conf. on Robotics and Biomimetics, Guilin, 2009, pp. 2356-2361. [ Links ]
[10] I. Gaiser et al., "A New Anthropomorphic Robotic Hand", in 8th IEEE-RAS Int. Conf. on Humanoid Robots, Daejeon, 2008, pp. 418-422. [ Links ]
[11] J. D. Bronzino, D. R. Peterson, "Biomechanics", in The Biomechanical Engineering Handbook, 2th ed., vol. 3. New York: McGraw-Hill, 2006. [ Links ]
[12] E. Portilla et al., "Analisis cinematico y diseno de un mecanismo de cuatro barras de falange proximal de dedo antropomorfico", Ciencia e Ingenieria Neogranadina [online], vol. 20, n° 6, pp. - 45-59, June 2010. [ Links ]
[13] M. Kutz, Ed., "Design of Artificial Arms and Hands for Prosthetic Applications", in Standard handbook of biomedical engineering and design. New York: McGraw- Hill, 2003. [ Links ]
[14] J. Becker and N. Thakor, "A Study of the Range of Motion of Human Fingers with Application to Anthropomorphic Designs", IEEE Transactions on Biomedical Engineering [online], vol. 35, n° 2, pp. 110-117, Feb. 1988 . [ Links ]
[15] J.C. Becker et al., "A study of human hand tendon kinematics with applications to robot hand design", in IEEE Int. Conf. Robotics & Automation, San Francisco, 1986, pp. 1540 - 1545. [ Links ]
[16] S. Parasuraman and K. Yee, "Bio-Mechanical Analysis of Human Hand", in Int. Conf. on Computer and Automation Engineering, Bangkok, 2009, pp. 93-97. [ Links ]
[17] S. Schulz et al., "A New Ultralight Anthropomorphic Hand", in IEEE Int. Conf. on Robotics & Automation, Seoul, 2001, pp. 2437-2441. [ Links ]
[18] G. A. Ocampo and J. Rondon, "Diseno y Construction de una mano robot de cuatro dedos que imite los modelos prensiles humanos", trabajo de grado, Facultad de Ingenieria Mecatronica, Universidad Militar Nueva Granada, Bogota, D.C. (Colombia), 2004. [ Links ]
[19] S. Roccella et al., "Design, fabrication and preliminary results of a novel anthropomorphic hand for humanoid robotics: RCH- 1", in IEEE Int. Conf. on Intelligent Robots and Systems, Sendai, 2004, pp. 266-271. [ Links ]
[20] J. Yang et al., "A multi-fingered hand prosthesis", Mechanism and Machine Theory [online], vol. 39, n°, 6, pp. 555-581, June 2004. [ Links ]
[21] A. Vardy, Articulated Human Hand Model with Inter-Joint Dependency Constraints, December 16, 1998. [Online]. Available: http://citeseerx.ist.psu.edu [ Links ]
[22] J. W. Soto and G, "Gini. Robotic Hand: Design Review and Proposal of New Design Process", World Academy of Science, Engineering and Technology [online], vol. 20, pp. 85-90, April 2007. [ Links ]
[23] C. Gosselin, Laboratorie de Robotique, L'Universite Laval, 2012. [online]. Available: FTP: robot.gmc.ulaval.ca Directory: en/research/theme301. [ Links ]
[24] C. Melchiorri and J. Salisbury, "An algorithm for the control of a hand-arm robotic system", in Int. Conf. Robots in Unstructured Environments, 1991, pp. 471-476. [ Links ]
[25] T. Okada, "Computer control of multijointed finger system for precise object handling", IEEE Transactions Systems, man & Cybernetics [Online], vol. 12, n°3, pp. 289-299, May 1982. [ Links ]
[26] S. Arimoto, Ed. "Characterisations of Human Hands", in Control Theory of multi fingered hands. London: UK: Springer, 2008. [ Links ]
[27] C. Gosselin et al., "An Anthropomorphic Underactuated Robotic Hand with 15 Dofs and a single actuator", in IEEE Int. Conf. on Robotics & Automation, Pasadena, 2008, pp.749-754. [ Links ]
[28] D. Lane et al., "The AMADEUS Dextrous Subsea Hand: Design, Modeling, and Sensor Processing", IEEE Journal of Oceancs Engineering [online], vol. 24, n°1, pp. 96-111, Jan. 1999. [ Links ]
[29] F. Lotti et al., "Development of UB Hand 3: Early Results", in IEEE Int. Conf. on Robotics & Automation, Barcelona, 2005, pp. 4488-4493. [ Links ]
[30] A. Caffaz and G. Cannata, "The Design and Development of the DIST-Hand Dextrous Gripper", in IEEE Int. Conf. on Robotics & Automation, Leuven, 1998, pp. 2075-2080. [ Links ]
[31] J. P. Gazeau et al., "The LMS Hand: force and position controls in the aim of the fine manipulation of objects", in IEEE Int. Conf. Robotics & Automation, Seoul, 2001, pp. 2642-2648. [ Links ]
[32] M.A. Diftler et al., "Robonaut 2 - The First Humanoind Robot in Space", in IEEE Int. Conf. Robotics & Automation, Shanghai, 2011, pp. 2178-2183. [ Links ]
[33] T. Iberall et al., "Control Philosophy and Simulation of a Robotic Hand as a Model for Prosthetic Hands", in IEEE Int. Conf. Intelligent Robots and Systems, Yokohama, 1993, pp. 824-831. [ Links ]
[34] F. Cunha et al., "Uma revisao critica das transmissoes e atuadores para proteses antropomorficas para membros superiores", in Congreso Argentino de Bioingenieria - II Jornada de Ingenieria Clinica, Tucuman, 2001, pp. 1-4. [ Links ]
[35] O. Aviles et al., "Dedos para "Grippers" Roboticos - Revision Bibliografica. Scientia et Technica [online], vol. 27, n°1, pp. 97- 102, abril, 2005. [ Links ]
[36] C. Mavroidis et al., "Actuators, Conventional actuators, shape memory alloys, and electro-rheological fluids", in Automation, Miniature Robotics and Sensors for Nondestructive Testing and Evaluation, American Society for Nondestructive Testing, 2000. [ Links ]
[37] D. L. Brock, Review of Artificial Muscle based on Contractile Polymers, Nov. 1991. [Online]. Available: http://www.ai.mit.edu/projects/muscle/papers/memo1330/memo1330.html [ Links ]
[38] Z. Yu and J. Gu, "A Survey on Real-time Controlled Multi-fingered Robotic Hand", in Canadian Conf. Electrical & Computer Engineering, Halifax, Canada, 2008, pp. 975-980. [ Links ]
[39] T. Doersan and L. Munoz, Robotic Hands: Modelisation, Control and Grasping Strategies, 2009. [Online]. Available: http://citeseerx.ist.psu.edu. [ Links ]
[40] J. R. Napier, "The prehensile movements of the human hand", Surger [online], vol. 38, n° 4, pp. 902-913, 1957. [ Links ]
[41] C. Xiong et al., "Robotic Grasp and Workpiece-Fixture Systems", in Fundamentals of robotic grasping and fixturing. Singapure: World Scientific Publishing Co., 2007. [ Links ]
[42] M. R. Cutkosky, "On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks", IEEE Transactions on Robotics and Automation [online], vol. 5, n° 3, pp. 269 -279, June 1989. [ Links ]
[43] A. Okamura et al., "An overview of dexterous manipulation", in Int. Conf. Robotics & Automation, San Francisco, 2000, pp. 255-262. [ Links ]
[44] D. Osswald and H. Worn, "Mechanical System and Control System of a Dexterous Robot Hand", in IEEE Int. Conf. on Humanoid Robots, Tokyo, 2001. [ Links ]
[45] H. Yussof et al., "Development of Optical Three-Axis Tactile Sensor and its Application to Robotic Hand for Dexterous Manipulation Tasks", in Fourth Asia Int. Conf. Mathematical/Analytical Modelling & Computer Simulation, Borneo, 2010, pp. 624-629. [ Links ]
[46] S. Takamuku et al., "Repetitive grasping with anthropomorphic skin-covered hand enables robust haptic recognition", in IEEE Int. Conf. Intelligent Robots & Systems, Nice, 2008, pp. 3212-3217. [ Links ]
[47] H. Liu et al., "A Dexterous Humanoid five/fingered Robotic Hand", 17th IEEE Int. Symposium Robot and Human Interactive Communication, Munich, 2008, pp. 371-376. [ Links ]
[48] K. Yong et al., "A Multi-sensor System Applied to Control an Intelligent Robotic Hand for Underwater Environment", in IEEE Int. Conf. on Mechatronics & Automation, Changchun, 2009, pp. 513-518. [ Links ]
[49] L. Chang et al., "Planning pre-grasp manipulation for transport tasks", in IEEE Int. Conf. on Robotics and Automation, Anchorage, 2010, pp. 2697-2704. [ Links ]
[50] R. Balasubramanian and A. M. Dolar, "Performance of Serial Underactuated Mechanisms: Number of Degrees of Freedom and Actuators", in IEEE Int. Conf. Intelligent Robots & Systems, San Francisco, 2011, pp. 1823-1829. [ Links ]
[51] O. Aviles, "Mecanismo de Preensao Direcionado a Aplicagoes de grippers Roboticos ou Maos Antropomorficas", in 6th Brazilian Conf. Dynamics, Control & their applications, Sao Paulo, 2007. [ Links ]
[52] E. Mattar, "Dexterous Robotics Hands: ANN Based Artificial Muscles Control", in UKSim 13th Int. Conf. Modelling & Simulation, Bahrain, 2011, pp. 224-229. [ Links ]
[53] R. Suzuki et al., "Internal Model Control Based Controller for Sensorless Force Control and Its Applications to Myoelectric Robotic Hand", in IEEE 35th Conf. Industrial Electronics, Porto, 2009, pp. 1609-1614. [ Links ]
[54] B. Kent, "Biologically Inspired Posture Control for a Dexterous Robotic Hand", in IEEE Int. Conf. Advanced Intelligent Mechatronics, Budapest, 2011, pp. 451-456. [ Links ]
[55] H. Yussof et al., "A new control algorithm based on tactile and slippage sensation for robotic hand", in IEEE World Automation Congress, Kobe, 2010. [ Links ]
[56] B. Siciliano and O. Khatib, eds., "Sensing and Perception", in Springer Handbook of robotics. Berlin: Springer, 2008, pp. 455-471. [ Links ]
[57] G. Cannata and M. Maggiali, "An Embedded Tactile and Force Sensor for Robotic Manipulation and Grasping", in IEEE Int. Conf. Humanoid Robots, Tsukuba, 2005, pp. 80-85. [ Links ]
[58] M. W. Strohmayr et al., "The DLR Touch Sensor I: A Flexible Tactile Sensor for Robotic Hands based on a Crossed-Wire Approach", in IEEE Int. Conf. Intelligent Robots & Systems, Taipei, 2010, pp. 897-903. [ Links ]
[59] D. Devereux, "Control Strategies for Whole Arm Grasping". A Dissertation submitted to the University of Manchester for the Degree of Doctor of Philosophy in the Faculty of Engineering and Physical Sciences, 2010. [ Links ]
[60] J. Parra, "Nuevas tecnologias de control aplicadas a la robotica", Avances Investigation en Ingenieria n° 5 2006. [ Links ]
[61] E. Larrarte, "Modelado y Control de posicion y de fuerza de una protesis robotica de mano", Universidad del Cauca, Facultad de Ingenieria Electronica y Telecomunicaciones. Maestria en Ingenieria, Area Electronica y Telecomunicaciones. Popayan, 2007. [ Links ]
[62] F. Medina, J. Gutierrez y V. Mosquera, "Control de fuerza por impedancia y estudio de un sensor de fuerza para una protesis de mano de nueve grados de libertad", Departamento de Electronica, Instrumentacion y Control, Universidad del Cauca. Disponible en: http://www.unicauca.edu.co/ai/publicaciones/Mosquera_ACA09.pdf [ Links ]
[63] M. V. Liarokapis, P. K. Artemiadis, P. T. Katsiaris, K. J. Kyriakopoulos, and E. S. Manolakos, "Learning human reach-to-grasp strategies: Towards EMG-based control of robotic arm-hand systems", Robotics and Automation (ICRA), 2012, IEEE International Conference on, pp. 2287-2292, 14-18, May 2012. [ Links ]
[64] M. V. Liarokapis, P. K. Artemiadis, P. T. Katsiaris, and K. J. Kyriakopoulos, "Learning task-specific models for reach to grasp movements: Towards EMG-based teleoperation of robotic arm-hand systems", Biomedical Robotics and Biomechatronics (BioRob), 2012, 4th IEEE RAS & EMBS International Conference on, pp.1287-1292, 24-27, June 2012. [ Links ]
[65] Z. Ju, H. Liu, "Human Hand Motion Analysis With Multisensory Information", Mechatronics, IEEE/ASME Transactions on, vol.19, no.2, pp.456466, April 2014. [ Links ]
[66] A. D. Deshpande, M. J. V. Zhe Xu, Weghe, B. H. Brown, J. Ko, L. Y. Chang, D. D. Wilkinson, S. M. Bidic, and Y. Matsuoka, "Mechanisms of the Anatomically Correct Testbed Hand", Mechatronics, IEEE/ASME Transactions on, vol.18, n° 1, pp. 238-250, Feb. 2013. [ Links ]
[67] Z. Li, C. Yang, and Y. Tang, "Decentralised adaptive fuzzy control of coordinated multiple mobile manipulators interacting with non-rigid environments", Control Theory & Applications, IET , vol. 7, n°. 3, pp. 397-410., February 14, 2013. [ Links ]
[68] C. Chen, D. S. Naidu, "Hybrid control strategies for a five-finger robotic hand", Biomedical Signal Processing and Control, vol. 8, Issue 4, pp. 382-390, July 2013. [ Links ]
[69] D. S. Naidu, C. Chen, A. Perez, and M. P. Schoen, "Control strategies for smart prosthetic hand technology: An overview", Engineering in Medicine and Biology Society, 2008. EMBS 2008. 30th Annual International Conference of the IEEE, pp. 4314, 4317, 20-25, Aug. 2008. [ Links ]
[70] R. N. Khushaba, A. Al-Ani, and A. Al-Jumaily, "Swarm Intelligence based Dimensionality Reduction for Myoelectric Control", Intelligent Sensors, Sensor Networks and Information, 2007. ISSNIP 2007. 3rd International Conference on , Conference on, pp. 577-582, 3-6, Dec. 2007. [ Links ]
[71] Y. Z. Arslan, Y. Hacioglu, and N. Yagiz, "Prosthetic hand finger control using fuzzy sliding modes", Journal of Intelligent and Robotic Systems, vol. 52 , pp. 121138, 2008. [ Links ]
[72] R. Kato, H. Yokoi, A. H. Arieta, W. and Yub, T. Arai, "Mutual adaptation among man and machine by using f-MRI analysis", Robotics and Autonomous Systems, vol. 57, pp. 161-166, 2009. [ Links ]