










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Desarrollo
versão impressa ISSN 0122-3461
Ing. Desarro. vol.33 no.2 Barranquilla jun./dez. 2015
https://doi.org/10.14482/inde.33.2.5865
http://dx.doi.Org/10.14482/inde.33.2.5865
Sistemas de control para mesas vibratorias: una revisión crítica
Control systems for shake tables: A critical review
Mauricio Bernal* Jorge Aponte**
Julián Carrillo***
Universidad Militar Nueva Granada (Colombia)
* Programa de Ingeniería Mecatrónica, Universidad Militar Nueva Granada (UMNG), Bogotá, D. C. Auxiliar de investigación. u1801247@unimilitar.edu.co.
** Programa de Ingeniería Mecatrónica, Universidad Militar Nueva Granada, Bogotá, D. C. Profesor e investigador, M.Sc. jorge.aponte@unimilitar.edu.co
*** Programa de Ingeniería Civil, Universidad Militar Nueva Granada, Bogotá, D. C. Profesor e investigador, Ph.D. wjcarrillo@gmail.com.
Correspondencia: Julián Carrillo. Carrera 11 n° 101-80, Edificio F, piso 2, Bogotá, D. C. A.A. 49300, Tel: 57-1-6500000, Ext. 1705.
Fecha de recepción: 5 de diciembre de 2013
Fecha de aceptación: 28 de marzo de 2015
Resumen
Las mesas vibratorias son herramientas cruciales para estudiar el desempeño de estructuras ante acciones sísmicas. Estos dispositivos se han convertido en una parte fundamental para la ingeniería sismorresistente y han demostrado ser efectivos para estudiar modelos dinámicos estructurales complejos. Uno de los aspectos más importantes que se deben considerar en la implementación de una mesa vibratoria es el sistema control necesario para reproducir precisamente los movimientos sísmicos. A partir de una extensa revisión de la literatura disponible, en este artículo se describen y discuten algunos de los sistemas de control más utilizados en diferentes tipos de mesas vibratorias utilizadas en el mundo. Con base en el análisis de los alcances, ventajas y limitaciones de los sistemas de control estudiados también se indican los controles con gran potencial de implementación en mesas vibratorias de uno y varios grados de libertad.
Palabras clave: control automático, control clásico, control moderno, control robusto, ensayo dinámico, mesa vibratoria.
Abstract
Shake tables are crucial tools for studying the performance of structures under seismic actions. These devices have become an essential tool for earthquake-resistant engineering and have demonstrated to be effective for studying complex structural dynamic models. One of the most important aspects to consider during implementation of a shake table is the system control needed to reproduce accurately the seismic movements. From an extensive revision of available literature, this article examines and discusses some of the controls more used in different types of shake tables around the world. Based on the analysis of scopes, advantages and drawbacks of control systems studied, it is also indicated the controls having great feasibility to be implemented in shake tables of single and multiple degrees of freedom.
Keywords: automatic control, classic control, dynamic test, modern control, robust control, shake table.
INTRODUCCIÓN
Una mesa vibratoria es una herramienta experimental para estudiar el comportamiento de estructuras sometidas a efectos sísmicos. El objetivo de una mesa vibratoria es la reproducción del registro de una excitación sísmica sobre la base de componentes estructurales, subestructuras o sistemas estructurales completos [1].
Desde la primera mitad del siglo XX se han desarrollado herramientas para estudiar los efectos de los sismos; sin embargo, las primeras mesas vibratorias con sistemas programables se desarrollaron solo hasta la década de los setenta [2]. Actualmente las mesas vibratorias pueden simular sismos en seis grados de libertad sobre estructuras de tamaño real [3].
En cuanto a la reproducibilidad de las señales, una mesa vibratoria debe cumplir con dos aspectos principales: los requerimientos dinámicos del espécimen de ensayo que se construye en escala real o reducida y la precisión del control en los movimientos que se desean reproducir [4].
El sistema de control se utiliza para comparar el valor medido de la respuesta (aceleración, velocidad o desplazamiento medido) con una entrada de referencia (variable de control), para así producir la entrada apropiada (señal de control) al sistema y, de esta manera, reducir la desviación o error al valor más pequeño posible [5].
El tipo de control depende en gran medida de los grados de libertad de la mesa, el tipo de actuador que genera el movimiento, los registros que se desean reproducir y la precisión requerida.
A lo largo de tiempo se han implementado diferentes algoritmos de control, los cuales varían desde un control proporcional, integral y derivativo (pid) hasta el uso de controles modernos, robustos y digitales para la precisión de los sismos simulados.
A partir de una extensa revisión de la literatura disponible, en este artículo se describen y discuten algunos de los controles disponibles y más utilizados en diferentes tipos de mesas vibratorias utilizadas en el mundo. Con base en el análisis de los alcances, ventajas y limitaciones de los sistemas de control estudiados también se indican los controles con gran potencial de implementación no solo en mesas vibratorias de un grado de libertad (sistemas siso), sino también en mesas vibratorias con varios grados de libertad (sistemas mimo).
EVOLUCIÓN Y CARACTERÍSTICAS DE MESAS VIBRATORIAS
Durante 1890 a 1950 se desarrolló e implementó un gran número de mesas vibratorias, a partir de la necesidad de la industria de estudiar y resolver problemas en estructuras sometidas a efectos sísmicos [2].
Las primeras mesas vibratorias generaban el movimiento de forma manual por medio de una rueda con manivela y una plataforma móvil sobre rieles, lo que permite un movimiento armónico en un grado de libertad [6]. Con el fin de estudiar el sismo que se presentó en California en 1906, este mecanismo fue remplazado por un pequeño motor eléctrico [7].
En 1930 nació una nueva generación de mesas vibratorias con la propuesta de Jacobsen [8], en la cual el movimiento se genera a partir de un péndulo que impacta una plataforma sostenida por resortes, lo cual produce un primer gran pico de aceleración seguido por diferentes aceleraciones, y frecuencias en la plataforma. Con este modelo de mesa vibratoria se realizaron diferentes avances en el estudio de suelos y cimentaciones [9], [10].
Después del sismo de Long Beach (1933) se planteó una nueva generación de mesas vibratorias que incluye actuadores hidráulicos para la generación de los movimientos [11]. Sin embargo, solo hasta 1936 se utilizó por primera vez un actuador hidráulico en una mesa vibratoria [12], la cual sobresalió por dos avances importantes: el uso de una señal registrada durante un sismo real y un primer intento de control por desplazamiento en lazo cerrado con el fin de minimizar el error.
El avance de las mesas vibratorias fue parcialmente interrumpido por la Segunda Guerra Mundial (1935-1945). Sin embargo, el atraso originado por este suceso promovió un gran número de desarrollos tecnológicos útiles en las mesas vibratorias, especialmente en términos de control mecánico y electrohidráulico [12].
Solamente hasta mediados de la década de 1960 los actuadores electro-hidráulicos en combinación con sistemas computacionales entraron en el campo de las mesas vibratorias [13], lo que permitió alcanzar aceleraciones de hasta 2 g en mesas vibratorias de un grado de libertad [14].
La era de las mesas vibratorias modernas comienza en 1972 con la instalación de la mesa vibratoria en la Universidad de Berkeley por parte de mts System Corporation [11].
Actualmente los avances logrados por Estados Unidos y Japón en el desarrollo de mesas vibratorias de gran tamaño permiten el control de hasta seis grados de libertad, lo que posibilita simular el comportamiento no lineal hasta la falla de estructuras a escala real [15].
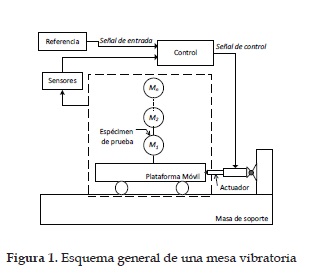
En la figura 1 se muestra el esquema general de una mesa vibratoria. Los parámetros Ml, M2... Mn representan los grados de libertad del espécimen de prueba. Una mesa vibratoria está compuesta por apoyos que pueden ser rodamientos lineales, uno o más actuadores con su respectivo sistema de potencia, sensores y un controlador. Dependiendo del tipo del actuador, una mesa vibratoria puede ser catalogada como hidráulica, neumática, servo-mecánica, entre otras [16].
En algunos ensayos en mesa vibratoria es necesario agregar una cantidad de masa extra para cumplir con los requerimientos de similitud dinámica del espécimen de prueba, y por tanto, se pueden agregar dispositivos de masa que cumplan con esta función sin cambiar la similitud dinámica [17].
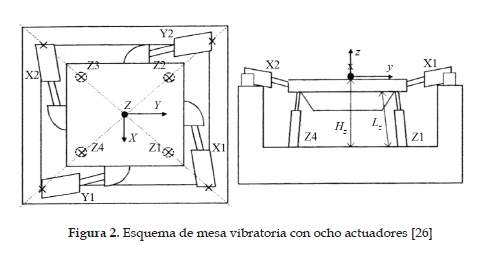
Para el desarrollo de mesas vibratorias con seis grados de libertad es posible utilizar diferentes configuraciones. Una configuración muy común es la plataforma de Stewart, la cual consta de seis actuadores que permiten tanto el desplazamiento como la rotación de la plataforma con igual facilidad [23]. Sin embargo, un problema característico de la plataforma de Stewart en la simulación de sismos consiste en que las rotaciones tienen una importancia significativamente menor que los desplazamientos, por lo que esta configuración no es la más adecuada para reproducir señales de sismos. Usualmente, para mesas vibratorias con seis grados de libertad se utilizan ocho actuadores [26], tal como se muestra en la configuración de la figura 2. Para generar el desplazamiento en la dirección se utilizan cuatro actuadores (Z1, Z2, Z3 y Z4), y para generar los desplazamientos en los ejes y se utilizan cuatro actuadores adicionales (X1, X2, Y1 y Y2).
Debido al costo del ensayo de estructuras completas en escala real actualmente se ha tomado como alternativa el ensayo de subestructuras (partes pequeñas de la estructura total) utilizando mesas vibratorias pequeñas de uno o dos grados de libertad, y luego estudiar el comportamiento global de la estructura mediante modelos numéricos [3].
SISTEMAS DE CONTROL DE MESAS VIBRATORIAS
Asegurar la precisión de los movimientos y la veracidad de los resultados en una mesa vibratoria es crítico para la obtención de una evaluación experimental significativa [19]. El sistema de control se utiliza para comparar el valor medido de la respuesta (aceleración, velocidad o desplazamiento medido) con una entrada de referencia (variable de control), para así producir la entrada apropiada (señal de control) al sistema y, de esta manera, reducir la desviación o error al valor más pequeño posible [5].
Generalmente las teorías de control más utilizadas son la teoría de control clásica (o control convencional) y la teoría de control moderno; sin embargo, en los últimos años se ha investigado el control digital.
El control puede ser no realimentado (en lazo abierto) o realimentado (en lazo cerrado), los cuales se diferencian por su capacidad de responder a perturbaciones en el sistema.
El control clásico es una teoría de control que se basa en el modelo del sistema, representado por un número de ecuaciones diferenciales lineales cuyos parámetros son conocidos. Este tipo de control es aplicable a sistemas lineales invariantes en el tiempo con una única entrada y una única salida (siso: Single-input, Single-Output).
El control moderno sigue la tendencia de los sistemas de ingeniería a una mayor complejidad, y puede utilizar sistemas lineales o no lineales [18], invariables o variables en el tiempo y sistemas siso o mimo (Multiple-input, Multiple-Output) [5].
El desarrollo del control moderno comenzó en 1960, incentivado por la necesidad de controlar sistemas cada vez más exigentes [24].
Las principales ramas de estudio en el control moderno son el control adaptativo, control robusto y control inteligente [20].
En el control digital, por medio de software es posible la inclusión de más de un tipo de teoría de control, y además se pueden intercambiar según la necesidad [21].
Para la realización de ensayos en mesas vibratorias hasta la falla de los especímenes, el control clásico no es suficiente y puede tener problemas [42].
Algunos estudios proponen tener por lo menos dos niveles de control [22]. El primer nivel es un control clásico que debe funcionar adecuadamente siguiendo una referencia; por ejemplo, un control proporcional, integral, derivativo (pid) o un control de tres variables (tvc: Three Variable Control). El segundo nivel es un algoritmo que debe funcionar adecuadamente en ensayos hasta la falla del espécimen o en ensayos en los que se necesite gran precisión; por ejemplo, se pueden utilizar técnicas avanzadas de control moderno como el algoritmo MCS (Minimal Control Synthesis), un control adaptativo rápido de la función inversa, o un método de compensación de la fuerza de reacción en tiempo real.
A partir de una extensa revisión de la literatura disponible a continuación se describen y discuten algunas técnicas de control utilizadas para mesas vibratorias y algunas técnicas actuales que están en desarrollo.
Control PID
El control PID es un control clásico que aunque surgió a principios del siglo XX; su gran desarrollo se presentó solo hasta las décadas de 1940 y 1950 [24]. El control PID es uno de los algoritmos de control clásico más utilizados para mesas vibratorias de un grado de libertad [4]. Este esquema de control busca minimizar el error de la respuesta mediante una acción correctiva que utiliza el error del sistema y las ganancias particulares de la acción proporcional, integral y derivativa.
El esquema general de un control pid se muestra en la figura 3.
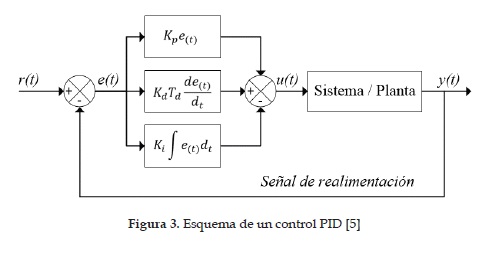
En la figura 3, r(t) es la entrada y la respuesta deseada del sistema, e(t) es el error del sistema, u(t) es la acción del control y y(t) es la respuesta del sistema a la señal de control.
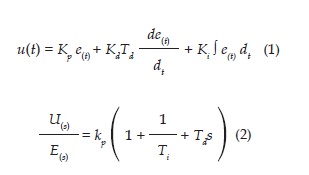
En la ecuación 1 se muestra el algoritmo pid en el dominio del tiempo, donde la acción proporcional sigue al error presente, la acción integral actúa en la acumulación de errores para eliminar cualquier offset o perturbación y la acción derivativa actúa con la velocidad de cambio para intentar corregir futuros errores [25].
Generalmente la función de transferencia se utiliza para controles pid mediante la transformada de Laplace, tal como se muestra en la ecuación 2.
Debido a que los parámetros Kp, Kd y K son ajustados antes de la prueba, el control pid es considerado como un control por realimentación fuera de línea [26]. Entonces, si alguno de los parámetros del modelo matemático del sistema cambia, esto se reflejará en el error del sistema controlado y el pid perderá su sintonización.
O'hagan y Ma [4] realizaron una evaluación experimental de un control pid para la mesa vibratoria uniaxial de la Universidad de Auckland (Nueva Zelanda). En dicho trabajo se presenta un análisis de cada acción del pid por separado, con un ancho de banda de 0 hasta 25 Hz. En tal estudio se encontró que el incremento de la acción proporcional, KV, incrementa la respuesta del actuador ante el error en todas las frecuencias de interés, que la ganancia de la acción integral, K, no tiene un efecto visible en el intervalo de frecuencias de interés y que Ka el incremento de la variable tiene un efecto atenuante en las frecuencias mayores de 2.5 Hz.
O'hagan y Ma [4] proponen el siguiente proceso secuencial para la sintonización del pid: 1) los parámetros integral y derivativo se ajustan en cero, 2) la acción proporcional se incrementa para obtener una respuesta satisfactoria para el intervalo de 0 a 5 Hz, 3) la ganancia derivativa se incrementa para mejorar la respuesta entre 5 a 10 Hz, y 4) se puede modificar la ganancia de la presión para mejorar las frecuencias mayores de 10 Hz. Esta sintonización no se realiza por medio de una señal cuadrada, como es común para un controlador pid, debido a que no es adecuado para una aplicación de ingeniería sísmica, especialmente si se desea trabajar en un intervalo grande de frecuencias. Por tanto, en el mismo trabajo se propone sintonizar el controlador pid con una curva de desplazamiento y aceleración en términos de frecuencia y fase, de tal forma que abarque el ancho de banda de interés de la mesa vibratoria.
En general, las teorías de control clásico son aceptables pero no óptimas en sistemas complejos, y pierden su utilidad frente a sistemas de múltiples entradas y múltiples salidas (mimo) [5]. En consecuencia, para mesas vibratorias con más de un grado de libertad, la implementación de un control pid no es el algoritmo más adecuado.
La principal dificultad con el control pid para una mesa vibratoria de seis grados de libertad es el costo computacional al realizar el cálculo de la cinemática directa e inversa del sistema, la cual puede llegar a trabajar con matrices de más de 15*15 [2]. Además, estudios recientes en control [3] han mostrado que si la respuesta del sistema controlado se aleja un valor muy grande del valor de referencia, la acción integral del pid crea una so-brecompensación que no podrá ser corregida. De esta manera, es necesaria una compensación adicional de atraso o lag, lo cual es la base del origen del control pidl (proporcional, integral, derivativo y de atraso).
Control anticipativo PIDF
En general, el control de prealimentación (feed-forward) se utiliza cuando la perturbación que afecta al sistema se puede medir pero no controlar y, por tanto, es necesario compensar la perturbación antes que afecte la variable controlada [27]. Un control pidf (proporcional, integral, derivativo y prea-limentado) es un control pid convencional con un lazo de alimentación de la perturbación.
Trombetti [28] presenta los resultados del modelado de la mesa vibratoria de la Universidad de Rice (Estados Unidos) y el método para calibrar y optimizar una mesa vibratoria servo-hidráulica. En esta mesa se imple-mentó un control PIDF para una frecuencia de hasta 2 kHz, con dos lazos separados. El lazo externo contiene las ganancias de la acción proporcional, integral, derivativa, de realimentación y de la diferencia de presión para el control del actuador. El lazo interno posee solo las ganancias de la acción proporcional y derivativa para el control de la servo-válvula. En la mesa vibratoria se ensayaron diferentes magnitudes de cargas rígidas y flexibles que van desde cero hasta la máxima capacidad de la mesa, con el fin de estudiar los efectos de estas en la calibración.
Los resultados del trabajo mostraron que existe una relación entre la respuesta dinámica del espécimen de prueba y el control de la mesa vibratoria, especialmente en pruebas cercanas a la capacidad máxima del actuador.
Estos resultados fueron reconfirmados por dos estudios desarrollados posteriormente por Trombetti y Conte [29], [30]. En el primer estudio [29] se desarrolló un modelo lineal analítico de la mesa uniaxial de la Universidad de Rise. En dicho estudio se incorporó un control PIDF y se estudió la sensibilidad de la mesa ante cargas rígidas con diferentes pesos. En el segundo estudio [30] se realizó un análisis comparativo de la dinámica de la mesa vibratoria y la afectación del rendimiento por diferentes condiciones de carga. para esto se sintonizaron individualmente las ganancias de la acción proporcional, integral, derivativa, de realimentación y de la diferencia de presión del controlador, variando una acción a la vez con las demás en cero. En este estudio se presentaron los resultados individuales de cada acción y se demostró que las características dinámicas de la carga afectan el movimiento de la mesa vibratoria.
Control por espacio de estados
Mientras que el control pid trabaja bajo aproximaciones en el dominio de la frecuencia compleja, haciendo uso de cambios de espacio mediante la transformada de Laplace, el control por espacio de estados es una aproximación en el dominio del tiempo [5].
El estado de un sistema dinámico es el conjunto de las variables de estado que determinan completamente el comportamiento de un sistema [34].
Este concepto no se aplica solo a sistemas físicos, sino también a sistemas biológicos, económicos, entre otros [42].
En las ecuaciones 3 y 4 se muestra la representación general de un sistema por espacio de estados.
Donde A es la matriz de estado, B es la matriz de entrada, C(t) es la matriz de salida y D es la matriz de transmisión directa.
La representación gráfica de las ecuaciones 3 y 4 se muestra en la figura 4.
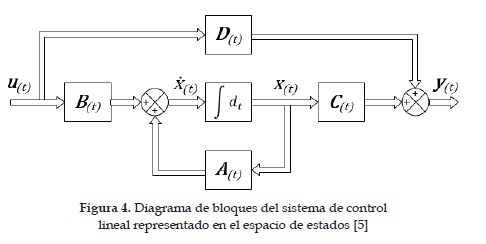
Para el desarrollo de un modelo matemático por espacio de estados para una mesa vibratoria se deben utilizar los valores proveídos por el fabricante, y en algunos casos será necesario utilizar valores empíricos para algunos componentes.
En un trabajo se estudia la realimentación de velocidad para un control de posición en tres aproximaciones diferentes (polos y ceros, diagrama de bloques y una aproximación practica). En dicho trabajo se elabora un espacio de estados de quinto orden del actuador lineal. Los resultados muestran una mejora en el control de posición en términos de ancho de banda y de amortiguación.
Control de tres variables, tvc
El desarrollo del control tvc (Three Variables Control) comenzó a finales de la década de 1950, de forma simultánea con investigaciones de sistemas no lineales [24].
El control tvc es un algoritmo de control moderno muy utilizado para mesas vibratorias, el cual permite un control fiable y efectivo en un intervalo amplio de frecuencias [33], [34], mediante una realimentación de tres estados del sistema [15]. En este control se realimentan las señales de desplazamiento (frecuencias bajas), velocidad (frecuencias medias) y aceleración (frecuencias altas) [29, 30].
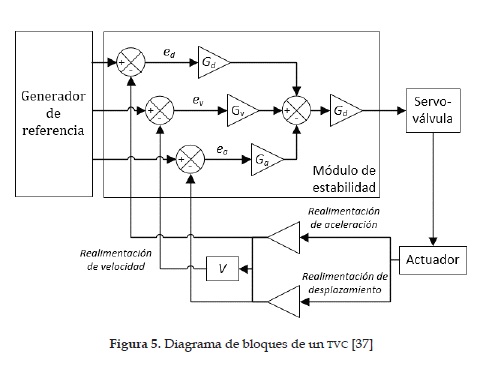
En el estudio realizado por Clark [37] se analizan las características dinámicas de una mesa vibratoria grande y de múltiples grados de libertad. En dicho estudio se buscó relacionar el rendimiento del sistema dinámico con las características inherentes del sistema y el espécimen. Para la mesa vibratoria Clark implementó un control por realimentación de estados, tal como el que se muestra en la figura 5. La señal de referencia es dividida en tres señales individuales que representan las señales ideales de cada estado por separado. Luego, las tres señales se restan con el valor medido con los transductores, para así obtener tres errores individuales (e^, ev y e), que luego son multiplicados por su ganancia respectiva (G,, Gv y Ga), y de esta manera obtener la señal de error compuesta y la señal de control para la servo-válvula.
Los resultados del trabajo de Clark mostraron un error máximo del 58 % en el intervalo de frecuencias de 0.4 a 40 Hz. El error máximo se localizó en algunos puntos críticos de resonancia de la mesa y del espécimen de prueba, cuyo fenómeno se discute en el estudio realizado en la mesa vibratoria de la Universidad de California, en Berkeley [38]. En dicho estudio se advierte que para la mesa vibratoria sin carga, la respuesta de la mesa es aceptable en el intervalo de frecuencias de operación. Sin embargo, para una prueba de la mesa vibratoria cargada con una estructura, la respuesta de la aceleración horizontal muestra un pico prominente de distorsión ubicado cerca de la frecuencia de resonancia de la estructura.
Una ventaja del algoritmo de control de tres variables se observó claramente en el estudio realizado por She [39] en mesas vibratorias que operan para frecuencias bajas, en el que las teorías de control clásico no han tenido resultados satisfactorios. En dicho estudio se desarrolló un control de tres variables para una pequeña mesa vibratoria de un grado de libertad, teniendo en cuenta como el error del sistema la distorsión harmónica total (thd: Total Harmonic Distortion). En tal trabajo se estudió la realimentación de la aceleración, velocidad y desplazamiento por separado, y se demostró que la velocidad es la variable de realimentación más efectiva para reducir el thd, una medida relativa de la distorsión de las amplitudes de las armónicas de una señal comparadas con la amplitud fundamental [46]. Con base en lo anterior She desarrolló un control con la realimentación negativa combinada de velocidad relativa (obtenida directamente de una sensor de velocidad) y de velocidad absoluta (obtenida de la integración de un sensor de aceleración).
Los resultados obtenidos en su trabajo fueron satisfactorios y se logró disminuir de 5 a 10 veces el error del thd para frecuencias bajas.
Control basado en la aceleración
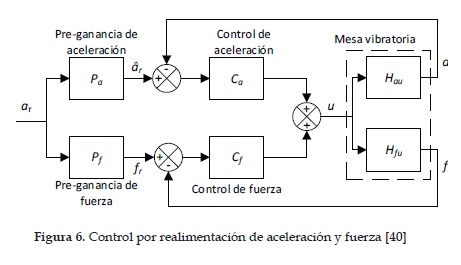
En el control propuesto por Stehman y Nakata [40] se utilizó una referencia de aceleración (a) y se realimentó directamente la aceleración medida (am) y la fuerza medida del actuador (fm), dejando de lado el desplazamiento y la velocidad. En la figura 6, Hau y representan la función de transferencia en lazo abierto de la dinámica de la mesa vibratoria para la aceleración y la fuerza, respectivamente. El control se implemento en la mesa vibratoria uniaxial ubicada en el Laboratorio de Pequeñas Estructuras y Pruebas Hibridas (ssht: Small Structures and Hybrid Test Laboratory) de la Universidad Johns Hopkins (Maryland, Estados Unidos).
El trabajo se dividió en tres etapas: en la primera se modeló la mesa vibratoria a partir de métodos experimentales; en la segunda se diseñó la realimentación del control y se obtuvieron las ganancias preliminares, y en la última se validó la estrategia de control propuesta. El resultado se comparó con una estrategia de control PID clásica con realimentación de desplazamiento, en la que los resultados demostraron que la estrategia de la realimentación de aceleración presenta menor error, especialmente en frecuencias altas.
En todas las pruebas para el control por desplazamiento el error promedio fue de 11.3 %, mientras que para el control por realimentación de aceleración y fuerza el error promedio fue de 9.1 %.
Control con seguimiento de la trayectoria de aceleración
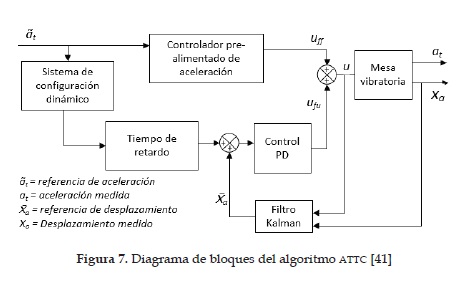
Nakata [41] propone un control basado en ia reaiimentación directa de ia aceleración. El algoritmo propuesto es un control de seguimiento de la trayectoria de aceleración (attc: Acceleration Trajectory Tracking Control), y su esquema se muestra en la figura 7. El control consta de una realimentación directa de la aceleración, un sistema de configuración dinámico del modelo, un tiempo de retardo, un lazo de realimentación del desplazamiento y un filtro tipo Kalman [43], [44] para la identificación del desplazamiento.
Un filtro Kalman, a diferencia de una transformada rápida de Fourier (FFT), opera en el dominio del tiempo, con un buen rendimiento en tiempo real. Además, el vector de ganancias de este varía en el tiempo, por lo cual es un estimador adaptable [46]. Un filtro Kalman puede ser utilizado en la identificación de parámetros en mesas vibratorias que pertenezcan a espacios de estados no lineales, identificando las señales armónicas en amplitud y fase [45].
El control attc se validó en un intervalo de frecuencias entre 0.1 y 30 Hz, y se comparó con un control de desplazamiento con comando de configuración (dfcs: Displacement Feedback with Comand Shaping), el cual es muy utilizado en mesas vibratorias comerciales.
El método attc mostró un rendimiento excelente en todo el intervalo de frecuencias y no se evidenciaron los picos de aceleración observados en el método dfcs.
En el control por realimentación de estados se busca realimentar el mayor número de estados posibles con el fin de mejorar la respuesta del sistema. Lo anterior conlleva a la adquisición de numerosos sensores, lo cual en la práctica no es económicamente viable [34]. Además, en muchos casos todos los estados de un sistema no son accesibles o no se conocen [42].
Como un tipo de control básico se puede implementar una combinación entre el método tvc, realimentar la presión de operación y luego utilizar una técnica de filtrado digital [40, 41], tal como un filtro tipo Notch [49]. Esta combinación puede ser una buena elección, pues todas son técnicas conocidas y han sido estudiadas y probadas en diferentes mesas vibratorias [22].
Control adaptativo
El control adaptativo es un control de lazo cerrado que busca llevar el error a cero a partir de la variación de los parámetros del controlador en tiempo real.
Un problema común con el control clásico consiste en que es necesario un modelo exacto o aproximado del sistema, lo cual en muchos casos conlleva a un estudio riguroso del sistema y necesita tener en cuenta un gran número de parámetros [1].
El control adaptativo basado en el algoritmo mcs (Minimal Control Synthesis) se desarrolló por la necesidad de la industria de contar con un sistema de control adaptable para el sistema que se va a controlar y para sus respectivos cambios a lo largo del tiempo.
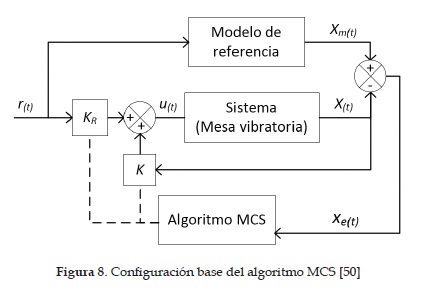
La implementación de este control en mesas vibratorias la realizaron en 1992 Stoten y Gomez [50] aplicando el algoritmo mcs a un grupo de mesas vibratorias pertenecientes a la Comisión Europea [52].
En la figura 8 se observa la configuración del algoritmo mcs, la cual consta de un modelo de referencia que define la respuesta ideal x a la entrada de referencia r(t), la respuesta real del sistema x(t), los parámetros de ganancia adaptables KR y K y el error xe(t), el cual es esencial para el cambio de los parámetros adaptables.
Con el paso de los años han sido implementadas variantes del mcs para mejorar la funcionalidad y la adaptabilidad del control bajo condiciones con muchas perturbaciones [51], [53].
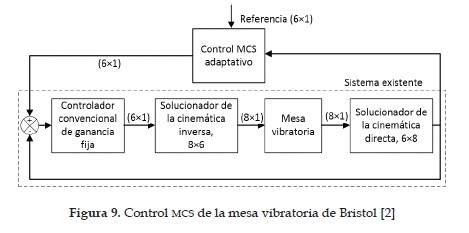
En 1993, se implementó en la Universidad de Bristol (Reino Unido) un control de 8 actuadores para una mesa vibratoria de seis grados de libertad. El control se implementó paralelamente con un control basado en un pid análogo.
En la figura 9 se muestra el esquema de control mcs de la mesa vibratoria de la Universidad de Bristol, donde se especifica el tamaño de las matrices de las señales [2].
Otro ejemplo relevante de la utilización de este control es la mesa vibratoria del E-Defense en Japón, el cual se define como un mcs descentralizado con una acción integral, basado en el error y realimentación [39].
Control inteligente
El control inteligente es un tipo de control que busca imitar ciertas características de sistemas biológicos. Por medio de redes neuronales, probabilidad, lógica difusa, aprendizaje de máquina, computación evolutiva y algoritmos genéticos el control inteligente es capaz de adaptarse y aprender.
En el campo de la ingeniería sísmica el control inteligente se ha utilizado en diferentes aplicaciones. Un ejemplo es la utilización de algoritmos genéticos para la obtención de parámetros reutilizables de un actuador servo-hidráulico [54]. Los parámetros obtenidos en dicho estudio demostraron ser satisfactorios en un rango amplio de cargas y diferentes escenarios, incluyendo diferentes propiedades del espécimen mecánico.
En otro trabajo se realizó un estudio comparativo entre algoritmos avanzados de control en vibración sísmica; en dicho estudio se compara el desempeño entre un control difuso y algoritmos genéticos para la sintonización de un control PID en un aislador [55].
Los resultados muestran una reducción del desplazamiento de hasta el 74 % en caso del control difuso y se presentan recomendaciones para la elección de algoritmos para control en vibración sísmica.
CONCLUSIONES
La importancia de las mesas vibratorias se evidencia por su contribución a la ingeniería sismorresistente en el último siglo. Un requisito fundamental de estas herramientas es lograr la mayor precisión posible en pruebas con excitaciones dinámicas. A lo largo de los años se ha propuesto un gran número de diferentes técnicas de control que abarcan desde el control clásico hasta sistemas digitales con diferentes tipos de control seleccionables.
En mesas vibratorias de un grado de libertad (sistemas siso) es común encontrar controles pid o variantes de este, los cuales han demostrado ser efectivos en el control del desplazamiento para ensayos no destructivos.
El control de aceleración por control pid es alcanzable en sistemas siso, pero presenta desplazamientos no deseados difíciles de compensar. La sintonización de este tipo de controladores y la elección de los parámetros ajustables se han estudiado en diferentes mesas vibratorias, y por tanto se puede concluir que es un control útil, simple y fiable que puede ser imple-mentado sin mayores esfuerzos electrónicos y mecánicos.
Para mesas vibratorias con varios grados de libertad (sistemas mimo) se pueden utilizar otras técnicas de control, como la realimentación de estados u observación de estados, en la cual también es posible implementar reconstructores de estados cuando no se tiene el modelo exacto del sistema.
El algoritmo tvc es un tipo de control por realimentación de estados y ha demostrado buenos resultados en un intervalo de frecuencias amplio, debido a que la realimentación del desplazamiento, velocidad y aceleración permite un mejor control en sistemas más complejos.
Un algoritmo adaptativo, especialmente el algoritmo mcs, ha sido implementado en mesas vibratorias grandes, y es útil cuando los parámetros de la mesa vibratoria no se conocen o cambian en el tiempo, es decir, para ensayos hasta la falla o ensayos destructivos.
Otros tipos de control han empezado a ser implementados en los últimos años, con una tendencia en el uso de controles digitales modernos, obteniendo así una mejor precisión en la simulación de los efectos sísmicos.
Finalmente, gracias al control digital es posible la implementación de otros tipos de controladores para mesas vibratorias; por ejemplo, el control robusto o el control inteligente, los cuales deben ser estudiados a fondo teniendo en cuenta los requerimientos actuales de precisión y carga.
Agradecimientos
Los autores expresan sus agradecimientos a la Vicerrectoría de Investigaciones y a los programas de Ingeniería Civil e Ingeniería Mecatrónica de la Universidad Militar Nueva Granada (umng) por el apoyo económico del proyecto imp-ing-1574.
REFERENCIAS
[1] O. Ozcelik, J. Luco, J. Conte, T. Trombetti, and J. Restrepo, "Experimental characterization, modeling and identification of the nees-ucsd shake table mechanical system", Earthquake Engineering and Structural Dynamics, vol. 37, pp. 243-264, 2008. DOI: 10.1002/eqe.754 [ Links ]
[2] R. Severn, D. Stoten, and Y. Tagawa, "The contribution of shaking tables to earthquake engineering", 15th World Conference on Earthquake Engineering, Lisboa, Portugal, 2012. [ Links ]
[3] R. Severn, "An Assessment of the use and value of shaking tables", International Conference on Experimental Vibration Analysis for Civil Engineering Structures, Varenna, Italy, pp. 463-475, 2011. [ Links ]
[4] J. O'hagan and Q. Ma, "Experimental assessment of pid control for a uniaxial shake table", 15th World Conference on Earthquake Engineering, Lisboa, Portugal, 2012. [ Links ]
[5] K. Ogata, Ingeniería de Control Moderna. Madrid: Pearson Education, 2010. [ Links ]
[6] R. Muir-Wood, "Robert Mallet and John Milne -earthquakes incorporated in Victorian Britain", Earthquake Engineering and Structural Dynamics, vol. 17, n°1, pp. 107-142, 1988. [ Links ]
[7] F. Rogers, "Experiments with a shaking machine. The Californian earthquake of 1906", A Report of the State Investigation Commission, Vol. Pt.II, 1906, pp. 326-335. [ Links ]
[8] L. Jacobsen, "Motion of soils subjected to simple harmonic motion vibration", Bulletin of the Seismological Society of America, vol. 20, pp. 160-195, 1930. [ Links ]
[9] H. Westergarrd, "Water pressures on dams during earthquakes", Transl. of the American Society of Civil Engineers, vol. 98, n° 2, pp. 418-433,1933. [ Links ]
[10] L. Hoskins and L. Jacobsen, "Water pressure in a tank caused by a simulated earthquake", Bulletin of the Seismological Society of America, vol. 24, n° 1, pp. 1-22, 1934. [ Links ]
[11] R. Severn, "The development of shaking tables -A historical note", Earthquake Engineering and Structural Dynamics, vol. 40, n° 2, pp. 195-213, 2011. [ Links ]
[12] A. Ruge, "A machine for reproducing earthquake motion from a shadowgraph of the Earthquake", Bulletin of the Seismological Society of America, vol. 26, n° 3, pp. 201-205, 1936. [ Links ]
[13] K. Muto, R. Bailey, and K. Mitchell, "Nominated lecture: Special requirements for the design of nuclear power stations to withstand earthquakes", Proceedings of the Institution of Mechanical Engineers, vol. 177, n° 1, pp. 155203, 1962. [ Links ]
[14] M. Sozen, S. Otani, P. Gulkan, and Nielsen N., "The University of Illinois earthquake simulator", 4th World Conference on Earthquake Engineering, Santiago, Chile, pp. 140-149, 1969. [ Links ]
[15] Y. Tagawa and K. Kajiwara, "Controller development for the E-Defense shaking table", Journal of Systems and Control Engineering, vol. 221, pp. 171-181, 2007. DOI: 10.1243/09596518JSCE331 [ Links ]
[16] T. Baran, A. Tanrikulu, C. Dundar, and A. Tanritulu, "Construction and performance test of a low-cost shake table", Experimental Techniques, vol. 35, n° 4, pp. 8-16, 2011. [ Links ]
[17] J. Carrillo and S. Alcocer, "Improved external device for a mass-carrying sliding system for shaking table testing", Earthquake Engineering and Structural Dynamics, vol. 40, pp. 393-411, 2010. DOI: 10.1002/eqe.1026 [ Links ]
[18] H. Sira, R. Márquez, F. Rivas, and O. Llanes, Control de Sistemas No Lineales, 2004. [ Links ]
[19] J. Kuehn, D. Epp, and W. Patten, "High-fidelity control of a seismic shake table", Earthquake and Engineering and Structural Dynamics, vol. 28, pp. 12351254, 1999. [ Links ]
[20] J. Slotine and W. Li, Applied Nonlinear Control: Englewood. Ney Jersey: Prentice Hall, 1991. [ Links ]
[21] S. Ammanagi, V. Poornima, A. Sera, and R. Sunder, "Development of a digitally-controlled three-axis earthquake shake table", Current Science, vol. 91, n° 2, pp. 190-203, 2006. [ Links ]
[22] N. Ogawa, K. Ohtani, T. Katayama, and H. Shibata, "Construction of a three-dimensional, large-scale shaking table and development of core technology", Philosophical Transactions of the Royal Society, vol. 359, pp. 1725-1751, 2001, [ Links ]
[23] L. Lin and M. Tsay, "Modeling and control of micropositioning systems using Stewart platforms", Journal of Robotics Systems, vol. 17, n° 1, pp. 17-52,2000. [ Links ]
[24] S. Bennet, "A brief history of automatic control", Control Systems, ieee, vol. 16, n° 3, pp. 17-25, 1996. [ Links ]
[25] D. Williams, M. Williams, and A. Blakeborough, "Numerical modeling of a servohydraulic testing system for structures", Journal of Engineering Mechanics, vol. 127, n° 8, pp. 816-827, 2001. [ Links ]
[26] A. Crewe y R. Severn, "The European collaborative program on evaluating the performance of shaking tables", Philosophical Transactions of The Royal Society, Series A, vol. 359, pp. 1671-1696, 2001. [ Links ]
[27] H. Zong, L. Pao, and R. De Callafon, "Feedforward control for disturbance rejection: Model matching and other methods", Control and Decision Conference (ccdc), Taiyuan, China, 2012. [ Links ]
[28] T. Trombetti, "Experimental/analytical approaches to modeling, calibrating and optimizing shaking table dynamics for structural dynamic applications", Ph.D. Thesis, Department of Civil Engineering, Rice, 1998. [ Links ]
[29] T. Trombetti and J. Conte, "Linear dynamic modeling of a uni-axial servo-hydraulic shaking table system", Earthquake Engineering and Structural Dynamics, vol. 29, pp. 1375-1404, 2000. [ Links ]
[30] T. Trombetti and J. Conte, "Shaking table dynamics: Result from a test-analysis comparison study", Journal of Earthquake Engineering, vol. 6, n° 4, pp. 513-541, 2002. [ Links ]
[31] Z. Rakicevic, M. Garevski, N. Naumovski, I. Markovski, R. Golubovskic, and D. Filipovski, "Upgrading of 5 dof seismic simulation system with the newest real-time three variable digital control system", 15th World Conference on Earthquake Engineering, Lisboa, Portugal, 2012. [ Links ]
[32] Y. Xu, H. Hua, and J. Han, "Three state controller design of shaking table in active structural control system", 2007 ieee International Conference on Control and Automation, Guangzhou, China, 2007. [ Links ]
[33] Y. Xu, H. Hua, and J. Han, "Modelling and controller design of a shaking table in an active structural control system", Mechanical Systems and Signal Processing, vol. 22, pp. 1917-1923, 2008. [ Links ]
[34] R. Burns, Advanced Control. Oxford: Butterworth Heinemann, 2001. [ Links ]
[35] F. Shuncheng, C. Weiqing, and L. Shijie, "Study on control method to improve the performance of dynamic response of shaking table for earthquake simulation", 3th International Conference on Measuring Technology and Mechatronics Automation, Shangai, China, 2011. [ Links ]
[36] Ramakrishna P., Shiju Varghese, N. Soni, and R. Patel, "The effect of velocity feedback in position control of high performance servo hydraulic actuator", International Conference on Control Communication and Computing, Thiruva-nanthapuram, India, pp. 440-445, 2013. [ Links ]
[37] A. Clark, "Dynamic characteristics of large multiple degree of freedom shaking tables", 10th World Conference on Earthquake Engineering, 1992, Madrid, España. [ Links ]
[38] A. Rinawi, R. Clough, and J. Blondet, "Pitching and interaction effects in EERC seismic simulator," 9th World Conference on Earthquake Engineering, Tokio, Japan, 1988. [ Links ]
[39] T. She, "Brief introduction of the close loop feedback methods of the low frequency vibration tables," 15th World Conference on Earthquake Engineering, Lisboa, Portugal, 2012. [ Links ]
[40] M. Stehman and N. Nakata, "Direct acceleration feedback control of shake tables with force stabilization", Journal of Earthquake Engineering, vol. 17, n° 5, pp. 736-749, 2013. [ Links ]
[41] N. Nakata, "High-fidelity model-based acceleration control of shake tables", 15th World Conference on Earthquake Engineering, Lisboa, Portugal, 2012. [ Links ]
[42] W. Brogan, Modern Control Theory. United States: Prentice Hall, 1991. [ Links ]
[43] P. Kasprzak, P. Kowalczuk, and T. Zawada, "Kalman-singer filter: theory and practice" , Signal Processing Symposium, Serock, Polonia, 2013. [ Links ]
[44] D. Newell, H. Dai, M. Sain, P. Quast, and B. Spencer, "Nonlinear modeling and control of a hydraulic seismic simulator", Proc. American Controls Conf., Seattle, WA, pp. 801-805, 1995. [ Links ]
[45] J. Yao, R. Xiao, S. Chen, D. Di, S. Gao, and H. Yu, "Acceleration harmonic identification algorithm based on the unscented Kalman filter for shaking signals of an electro-hydraulic servo shaking table", Journal of Vibration and Control, vol. 35, pp. 1836-1849, 2014. DOI: 10.1177/1077546311429151 [ Links ]
[46] J Yao, D. Di, G. Jiang, S. Gao, and H. Yan, "Real-time acceleration harmonics estimation for an electro-hydraulic servo shaking table using kalman filter with a lineal model", IEEE Trans. On Control Systems Technology, vol. 22, n° 2, pp. 794-800, 2014. [ Links ]
[47] L. Tan and J. Jiang, Digital Signal Processing: Fundamentals and Applications, 2a ed. United States: Academic Press, 2013. [ Links ]
[48] A. Daher, E. Baghious, and G. Burel, "Optimal generalized design of transform-based block digital filters," IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, China, 2009. [ Links ]
[49] W. Zhang and L. Zhang, "The design of IIR digital notch filters," Computer Science-Technology and Applications, Chongqing, China, 2009. [ Links ]
[50] D. Stoten and E. Gomez, "Adaptive control of shaking tables using the minimal control synthesis algorithm", Philosophical Transactions of The Royal Society, series A, vol. 359, pp. 1697-1724, 2001. [ Links ]
[51] D. Stoten and N. Shimizu, "The feedforward minimal control synthesis algorithm and its application to the control of shaking-tables", Journal of Systems and Control Engineering, vol. 221, n° 3, pp. 423-444, 2007. DOI: 10.1243/09596518JSCE246 [ Links ]
[52] E. Gomez and D. Stoten, "A comparative study of the adaptive MCS control algorithm on European shaking-tables", 12th World Conference on Earthquake Engineering, Auckland, Nueva Zelanda, 2000. [ Links ]
[53] K. Seki, M. Iwasaki, and K. Yasuda, "Adaptive feedforward compensation for reaction force with nonlinear specimen in shaking table", 2009 IEEE Conference on Mechatronics, Málaga, España, 2009. [ Links ]
[54] Y. Qian, G. Ou, A. Maghareh, and S.J. Dyke, "Parametric identification of a servo-hydraulic actuator for real-time hybrid simulation", Mechanical Systems and Signal Processing, vol. 48, pp. 260-273, 2014. [ Links ]
[55] M. Patrascu, I. Dumitrache, and P. Patrut, "A comparative study for advanced seismic vibration control algorithms", University Politehnia of Bucharest Sci. Bull, series C, vol. 74, Iss. 4, 2012. [ Links ]
