










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkIngeniería y Desarrollo
versão impressa ISSN 0122-3461versão On-line ISSN 2145-9371
Ing. Desarro. vol.34 no.1 Barranquilla jan./jun. 2016
Estudio experimental de fallas en engranajes rectos por desalineación, excentricidad y diente roto
Experimental study on failures in spur gears caused by misalignment, eccentricity and broken teeth
Anderson Herrera Delgado*
Iván Jaimes Sánchez**
Jabid Quiroga Méndez***
Universidad Industrial de Santander (Colombia)
*Ingeniero Mecánico, Universidad Industrial de Santander, Bucaramanga (Colombia) elander_111@hotmail.com
**Ingeniero Mecánico, Universidad Industrial de Santander, Bucaramanga (Colombia) ivjam@hotmail.com
***M. Sc. en Ingeniería Mecánica, Florida State University. Profesor asociado Escuela de Ingeniería Mecánica Universidad Industrial de Santander, Bucaramanga (Colombia) jabib@uis.edu.co
Correspondencia: Universidad Industrial de Santander. Escuela de Ingeniería Mecánica, Ciudad Universitaria, cra. 27 calle 9, 6325272, Buca-ramanga, Santander.
Fecha de recepción: 05 de mayo de 2014
Fecha de aceptación: 24 de noviembre de 2015
Resumen
En este artículo se presenta un estudio realizado para el monitoreo de engranajes rectos sometidos a fallas en diente roto (incipiente, intermedia y severa), desalineación angular y excentricidad; en cada uno de los escenarios de falla estudiados se obtienen los índices estadísticos de condición RMS, Factor de Cresta y Curtosis en el dominio del tiempo y el espectro en el dominio de la frecuencia. Las pruebas se llevan a cabo en un banco diseñado y construido específicamente para la reproducción de las anteriores fallas. Los resultados obtenidos en el dominio del tiempo muestran que el valor RMS y el Factor de Cresta, en todos los casos estudiados, presentaron un comportamiento consistente con la evolución de la falla, mientras que el valor de Curtosis solo permitióde manera consistente la detección de la falla por excentricidad.
Palabras clave: fallas engranajes rectos, RMS, Factor de Cresta, Cur-tosis, espectro.
Abstract
In this paper is presented a study developed to monitor spur gears exposed to different kinds of failures such as broken teeth (incipient, intermediate and severe), angular misalignment and eccentricity. For every study cases RMS, crest factor and Kurtosis in the time domain are obtained and the spectrum in the frequency domain. The tests were developed in a test bed designed and built specifically to emulate fault conditions. The results obtained in the time domain shows up that the RMS value and the Crest Factor reveal a consistent behavior with the fault severity. Additionally, experimental results shown that the Kurtosis value barely identified consistently the failure caused by eccentricity.
Keywords: Spur Gears Failures, RMS, Crest Factor, Kurtosis, Spectrum.
INTRODUCCIÓN
La detección de fallas de manera oportuna y eficiente constituye uno de los retos más importantes asociados al mantenimiento predictivo. Fallas imprevistas pueden afectar la integridad y la confiabilidad de los equipos a través de paradas no programadas, reducción de su vida útil, altos costos de asociados al mantenimiento correctivo y baja calidad de los productos.
En la literatura se encuentran varios estudios que abordan problemas en las transmisiones de potencia a base de engranajes. En [1] se menciona la dificultad para el diagnóstico de fallas en transmisiones de engranajes debido a la gran diversidad de fallas que se pueden presentar en este tipo de sistemas, como fallos en la instalación que derivan problemas de desalineación o excentricidad, desgaste y rotura de dientes del engranaje.
En sus etapas iniciales las fallas producen una sintomatología que dificulta la detección de la condición anormal. Los rasgos de falla evolucionan lentamente y se manifiestan con gran magnitud cuando la falla estácerca de tornarse catastrófica [2].
En [3] se realiza una revisión en la literatura de los índices de monitoreo de condición para una transmisión de engranajes, describiendo el progreso y los cambios en los últimos 30 años, las técnicas de análisis de vibración, los indicadores y los parámetros utilizados en el monitoreo, se disponen en una perspectiva histórica, organizando y reagrupando estas técnicas para que puedan ser reconocidas con facilidad.
En [4] se muestran las dificultades asociadas al uso de parámetros en el dominio del tiempo, en el establecimiento de la condición de transmisiones de engranajes. En [5] se monitorea una transmisión helicoidal con picaduras en sus dientes a través de los indicadores RMS, pico a pico y Curtosis. En esta investigación se concluye que la presencia de picaduras no puede ser revelada claramente, a menos que la gravedad del fallo sea significativa.
En [6] se monitorea el desgaste en las superficies de los dientes de una transmisión de engranajes rectos a través de los valores de Curtosis. Resultados experimentales muestran que no existe una relación precisa entre la evolución del valor de Curtosis y la condición de falla. En [7] se estudia el Factor de Cresta en la evolución del desgaste de engranajes helicoidales. La experimentación mostróque el cambio de este indicador no fue consistente con la evolución de la falla.
En [8] se realizóuna investigación sobre el desempeño de los indicadores estadísticos rms y Curtosis, comparando entre sítres diferentes escenarios de propagación de grieta en engranajes rectos, los resultados que se obtienen se basan en una simulación y se concluye las capacidades de estos indicadores en la detección de este tipo de falla.
En este artículo se presenta un estudio experimental de fallas en engranajes rectos por desalineación, excentricidad y diente roto, utilizando el espectro de frecuencia y los factores estadísticos RMS, Factor de Cresta y Curtosis en el dominio del tiempo.
MARCO TEÓRICO Y METODOLOGÍA RMS (Root Mean Square)
El valor rms es una medida de la energía de una señal. En el caso de mo-nitoreo en este estudio el valor del RMS de la señal de vibración se asocia a la presencia de defectos que pueden ser detectados con el aumento de este valor. En [9]-[11] se encuentra que el valor rms de la señal de vibración cambia con el progreso de la falla en los dientes. Adicionalmente, se muestra que este valor resulta sensible a las variaciones en las condiciones de funcionamiento. El indicador rms se obtiene usando (1) y (2).
Donde N es el número de muestras tomadas de la señal, x(n) es la amplitud de la señal para la n muestra y Xes el valor medio de las N muestras.
Factor de Cresta (FC)
Este indicador se define como la relación entre el valor pico de la señal de entrada y el valor rms (3). Por lo tanto, los picos de la señal en el dominio del tiempo darán como resultado un incremento en el FC. Este factor es usado para detectar cambios en el patrón de la señal debido a fuentes de vibración impulsivas como un diente roto en un engranaje [9], [11].
Donde PV es el valor pico de la señal. Curtosis
Estádefinido como el cuarto momento estadístico (4) y su incremento indica que la distribución de la vibración ya no es una distribución gaussiana. Esto se debe principalmente a los impulsos (picos aislados con alta amplitud) generados por los engranajes afectados.
Donde N es el número de muestras tomadas en la señal, x es el valor de la señal para la i-esima muestra y Xes el valor medio de las N muestras.
METODOLOGÍA DE LAS PRUEBAS
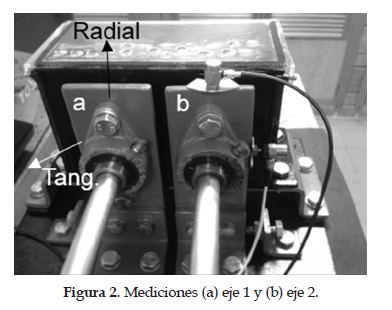
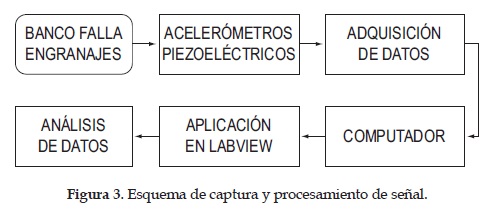
Para el estudio de las fallas en engranajes rectos, se implementa un banco de pruebas, ver Figura 1, el cual cuenta con un motor DC de 2 Hp, 850 rpm, un acelerómetro de referencia pcb 352C33 ubicado en dirección radial (vertical) y otro de referencia BK 4513 ubicado en dirección tangencial (horizontal), ver Figura 2, una tarjeta de adquisición de datos NI 9234 y un computador para el análisis de los datos.

La señal de vibración que proviene de los acelerómetros piezoeléctricos, es capturada a través de la tarjeta de adquisición de datos a una frecuencia de muestreo de 12.5 KHz utilizando un ventaneo tipo Hanning, posteriormente los datos son procesados en LabVIEW® para ser analizados, ver Figura 3.
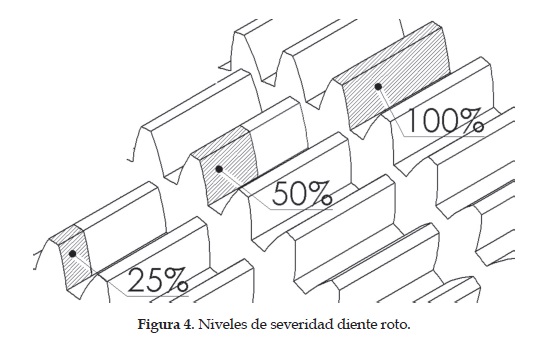
Para llevar a cabo el estudio de severidad de la falla de diente roto se plantearon tres escenarios de falla, incipiente, intermedia y severa, con 25%, 50% y 100% de pérdida del diente, respectivamente, ver Figura 4. En cuanto al desalineamiento se induce un escenario con una desalineación angular aproximadamente de 1.59, que es producido desplazando los soportes del eje de salida y dejando fijos los del eje de entrada. Por último, se emula un escenario de falla que corresponde al de engranaje excéntrico, el cual es realizado utilizando un buje con una excentricidad de 1.8 mm que se ajusta sobre un engranaje en buen estado.
Para cada escenario de falla se realizan 5 pruebas y se registran los datos correspondientes a cada situación de estudio, obteniendo asíuna tendencia de los índices estadísticos de condición y un espectro en el dominio de la frecuencia. Las pruebas desarrolladas con los engranajes en buen estado son utilizadas como referencia para cada uno de los escenarios de falla planteados. Las pruebas efectuadas en todas las condiciones de falla y en condición normal se realizan sin carga; por lo tanto, se espera que los indicadores de falla presenten valores bajos en las primeras etapas del desarrollo de la falla.
RESULTADOS
Análisis en el Dominio del Tiempo
Para evaluar el comportamiento de los indicadores de falla propuestos, rms, Factor de Cresta y Curtosis, en cada eje para el escenario de engranaje con diente roto se realiza un diseño experimental factorial buscando una relación significativa entre la severidad de la falla y la dirección de medición. Los resultados experimentales son evaluados estadísticamente a través de un análisis de varianza anova. Luego de desarrollar la matriz anova con los datos de cada una de las fallas, se realiza un análisis duncan para cada factor (rms, Factor de Cresta y Curtosis), el cual permite identificar quénivel de severidad presenta mejor desempeño frente a las direcciones de medición radial y tangencial en cada condición de falla. Por motivos de espacio no se muestran los resultados específicos de cada matriz anova y de cada análisis Duncan. Sin embargo, a lo largo del análisis de cada condición de falla se menciona el resultado que arrojaron los análisis estadísticos.
Resultados RMS en Diente Roto
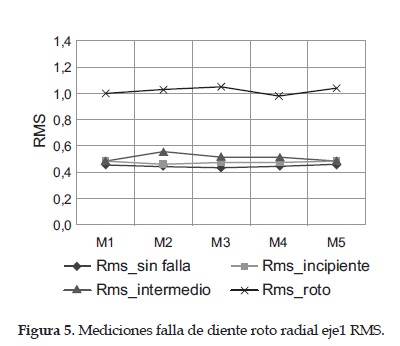
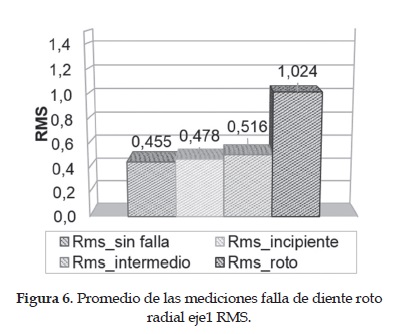
Las pruebas mostraron que el valor rms fue incrementando con la severidad de la falla. El análisis Duncan mostróque en el eje 1 la condición severa es la que presenta un mejor comportamiento estadístico y que la mejor dirección de medida corresponde a la dirección radial, ver Figuras 5 y 6. Sin embargo, este indicador presenta una sensibilidad baja para detectar cambios en el volumen del diente hasta un 50%. La pérdida total del diente registróun cambio significativo en el valor de este indicador con un incremento del 125% en la energía de vibración,
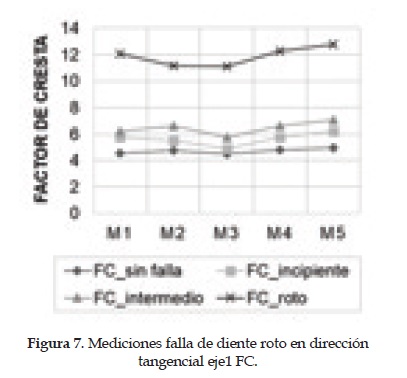
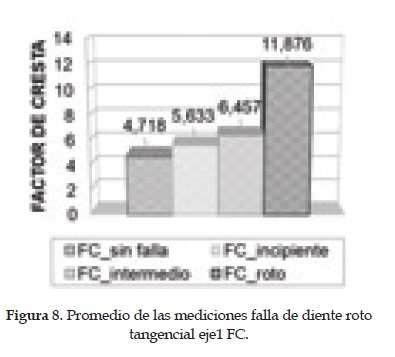
Resultados Factor de Cresta en Diente Roto
Para este indicador los resultados experimentales y el análisis de Duncan mostraron el mejor desempeño estadístico cuando la medida se realiza en dirección tangencial en el eje 1 y en un nivel de severidad grave, ya que éste presentóun incremento del 132% en su valor, ver Figuras 7 y 8. Al igual que el rms, el Factor de Cresta, aunque mejora levemente, ofrece dificultades para la identificación de pérdidas de volumen de diente en sus primeras fases, por el poco cambio en su magnitud.
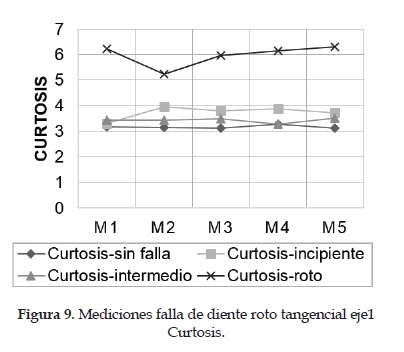
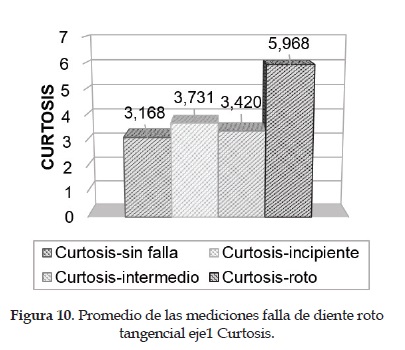
Resultados Curtosis en Diente Roto
Basado en los resultados de la matriz anova y del análisis Duncan para el indicador Curtosis, se obtiene que la mejor medición y la más significativa es en la dirección tangencial, en el eje 1 y en un nivel de severidad grave, ya que éste presentóun incremento del 88% en su valor, ver Figuras 9 y 10. Sin embargo, las fluctuaciones que se presentan no lo hacen un factor estadísticamente confiable para la detección específica de este tipo de fallas. El valor de Curtosis presentóun decremento en su magnitud con el aumento de la severidad del 25% al 50% de pérdida del diente.
Falla de Desalineación
Se analiza de forma comparativa la mejor dirección de medición y los valores de cada factor, frente a los valores calculados para los engranajes en buen estado; con el fin de verificar su desempeño para identificar anomalías.
Resultados RMS, FC Desalineación
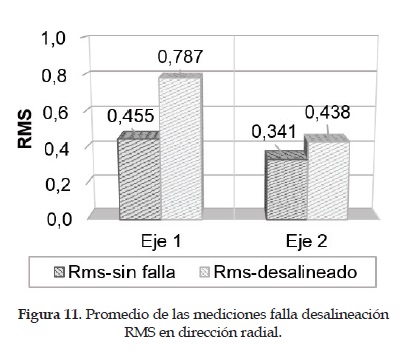
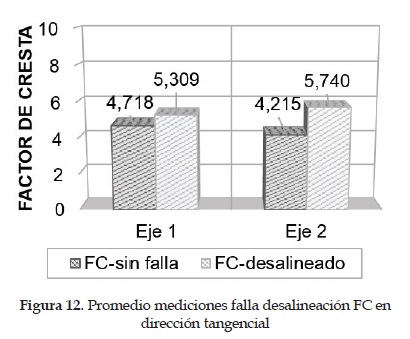
Resultados experimentales muestran que el rms presenta un incremento con respecto a la medida en condición normal de alrededor del 73% en el eje 1 y del 28% en el eje 2 en la dirección radial, ver Figura 11. En cuanto al Factor de Cresta se observa un aumento del 13% en el eje 1 y 36% en el eje 2 en la dirección tangencial con respecto a la condición normal, ver Figura 12. Los anteriores resultados permiten candidatizar a ambos indicadores para monitoreo de desalineación en transmisiones de engranajes. Sin embargo, el factor rms presenta más sensibilidad a este tipo de falla.
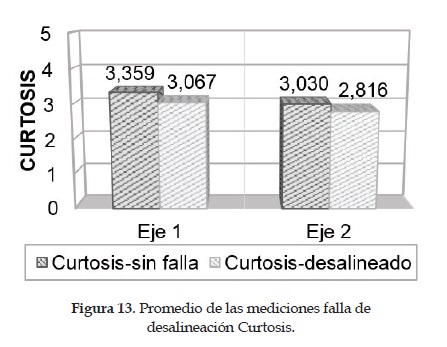
Resultados Curtosis Desalineación
Las pruebas no revelaron un incremento del valor del índice estadístico en ninguna dirección cuando la transmisión fue sometida a este tipo de falla, ver Figura 13. Por el contrario, este indicador se reduce en magnitud en presencia de desalineamiento.
Falla de Excentricidad
Se analiza de forma comparativa la mejor dirección de medición y los valores de cada factor, frente a los calculados para los engranajes en buen estado; apreciándose mayores incrementos en dirección radial para los factores rms y Factor de Cresta, a diferencia de Curtosis que aumenta en dirección tangencial.
Resultados RMS, FC, Curtosis
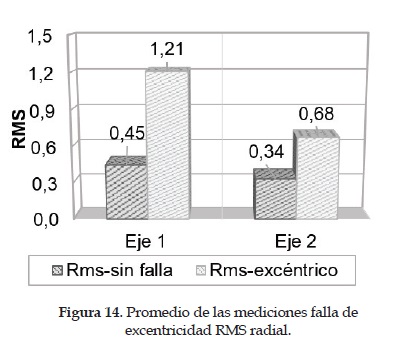
En las mediciones tomadas se aprecia el incremento del valor de cada factor, para el índice rms se observa un aumento del 169% en el eje 1 y del 100% en el eje 2, para el FC el aumento es del 118% en el eje 1 y 130% en el eje 2, (ver Figuras 14 y 15), mientras que para Curtosis el aumento es del 52% en el eje 1 y 16% en el eje 2, ver Figura 16.
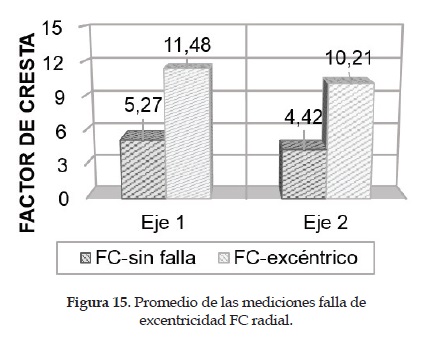
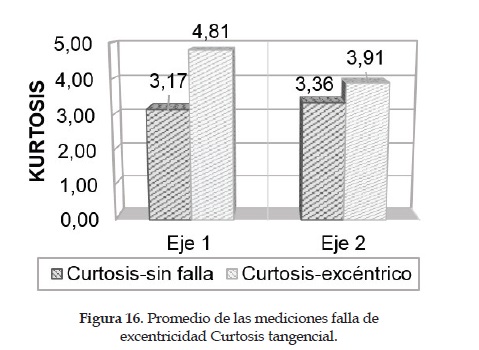
Bajo las condiciones en que se realizan las pruebas, se puede establecer a los tres parámetros estadísticos, como indicadores que permiten tener un indicio de la presencia de la falla de excentricidad.
Análisis en el Dominio de la Frecuencia
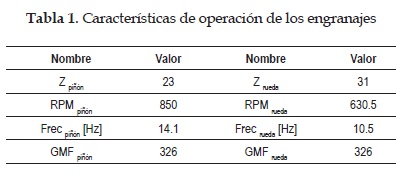
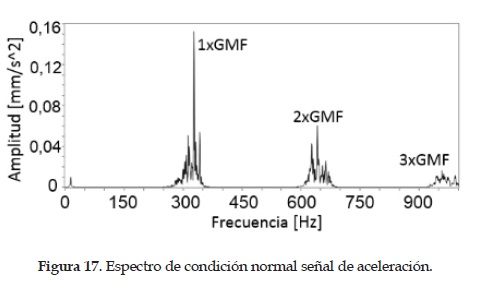
Los espectros obtenidos del análisis de las vibraciones en cada escenario de falla investigado son presentados en aceleración y velocidad. La presencia de cada una de las fallas estudiadas se revela en ciertos valores de frecuencia en el espectro. Las frecuencias propias de cada falla dependen de la velocidad de operación, del número de dientes del piñón, ver Tabla 1, y se conoce como frecuencia de paso de dientes, GMF Gear Mesh Frecuency, su valor estádado por las expresiones (5) y (6).
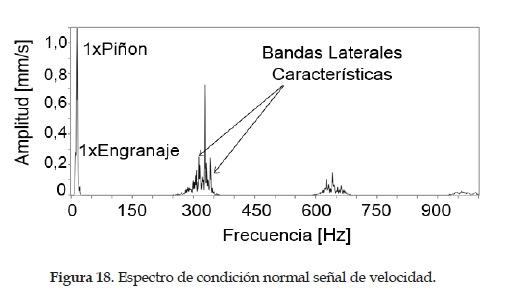
Bajo las condiciones en las que se realizaron las pruebas, la dirección de medición en la que se detectómayor energía de vibración fue la dirección radial. En la Figura 17 se observan los espectros para los engranajes en buen estado y las diferentes frecuencias de interés, aparece la frecuencia de paso de dientes gmf a 326 Hz, junto con las bandas laterales y los armónicos a 2xgmf y 3xgmf, En la Figura 18 se detecta la presencia de armónicos a 1xRPM del piñón y 1xRPM del engranaje.
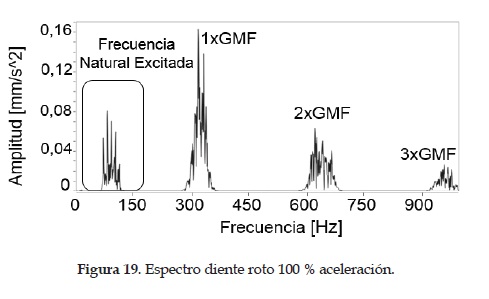
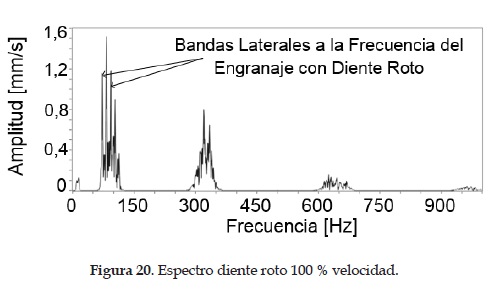
Para el escenario de engranajes con Diente Roto, el nivel de severidad grave es mostrado en la Figura 19, en donde se observa la frecuencia de paso de dientes gmf y los armónicos a 2xgmf y 3xgmf, también aparece la frecuencia de resonancia del engranaje con un valor cercano a 100 Hz y pequeñas bandas laterales alrededor de esta, ver Figura 20.
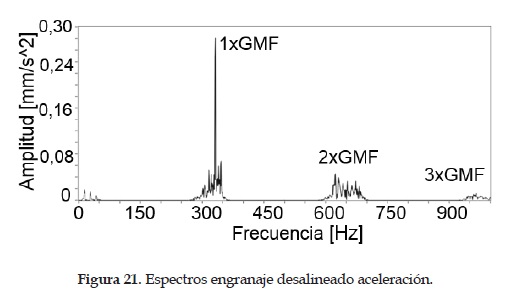
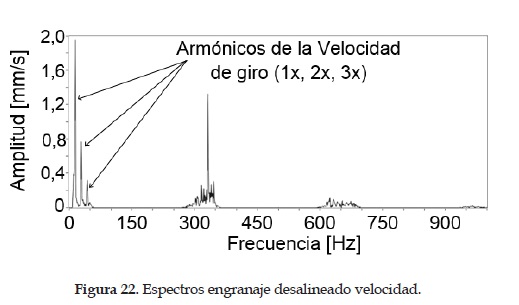
La Figura 21, muestra los espectros de aceleración para los engranajes desalineados, en donde se observa un aumento del 90% en la amplitud del GMF respecto a las pruebas realizadas para los engranajes en buen estado; en la Figura 22, se hace imperceptible el armónico en 3xGMF debido a la alta amplitud con la que se muestran los armónicos de la velocidad de giro de cada eje en 1x, 2x y 3x RpM.
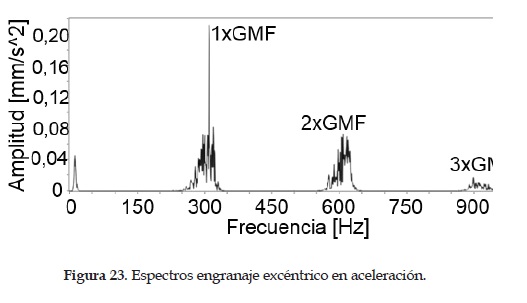
para el escenario de falla del engranaje excéntrico, existe una pérdida de transmisión del movimiento, por lo que la velocidad de operación se reduce a 800 rpm en el eje de entrada. En la Figura 23 se aprecia un aumento de 40% en la amplitud del GMF, respecto a las pruebas realizadas para los engranajes en buen estado.
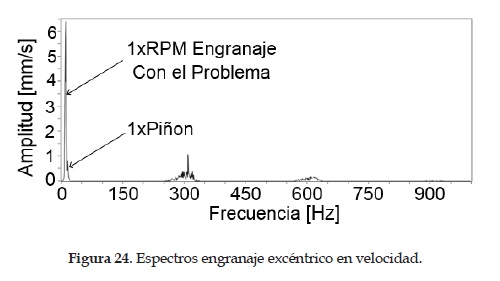
En la Figura 24, se hace imperceptible el armónico en 3xgmf e incluso el armónico en 2xgmf debido a la alta amplitud del 1xRpm del engranaje de salida, lo que indica un aumento en la energía de la vibración cuando se trabaja con este tipo de falla.
CONCLUSIONES
En este artículo se presentóun estudio experimental de problemas en engranajes rectos causados por desalineación, excentricidad y Diente Roto. Los resultados de los parámetros estadísticos en el dominio del tiempo y bajo las condiciones en las que se realizaron las pruebas para el engranaje son: en el escenario de diente roto, el estadístico rms, permitióreconocer la presencia de anomalías en el equipo con mejores resultados en dirección radial. El Factor de Cresta y Curtosis, estadísticamente no fueron significativos para detectar la presencia de esta falla, a pesar de que su valor se incrementópara algunos casos como el nivel de falla severo. En el caso del Factor de Cresta, la falla severa del diente produce un cambio significativo en la amplitud de la vibración, la cual se manifiesta en el incremento del indicador. La baja sensibilidad de la Curtosis y el rms al avance de la falla de Diente Roto se puede atribuir a que estos indicadores se determinan considerando la señal de vibración del recorrido del engranaje, una porción de esta con falla y el resto en condición normal, atenuando la ganancia del indicador por la presencia de la falla. En la falla emulada de engranaje excéntrico, los tres estadísticos fueron indicadores representativos de esta falla. En cuanto al engranaje desalineado, el indicador rms, mostróun incremento en la energía de vibración, siendo el indicador más sensible y por lo tanto más representativo para detectar este tipo de falla, con los mejores resultados en dirección radial. La capacidad de detección del RMS en este tipo de falla, se puede considerar como el resultado de la variación cíclica (180) del contacto de los dientes, pasando de una gran presión sobre estos, en una porción de la rotación, a una menor en el resto. El Factor de cresta no permitióestablecer un indicio de la falla de desalineación, ya que su incremento no fue consistente frente a los valores de los engranajes en buen estado. El valor de Curtosis no presentócambios que reflejan la presencia de esta falla.
En el Dominio de la Frecuencia, los espectros presentaron cambios satisfactorios en relación con el aumento de magnitud frente al nivel de severidad en cada una de las fallas estudiadas. En general, todos los escenarios de falla estudiados en el Dominio de la Frecuencia, arrojaron resultados que coinciden con la información encontrada en la literatura, teniendo mejores resultados el espectro de aceleración en dirección radial.
Basado en los resultados de este trabajo es posible proponer un sistema de monitoreo de transmisiones por engranajes que realice la detección de la anomalía usando los indicadores estadísticos estudiados, RMS, curtosis y Factor de Cresta. Una vez se identifique la condición anormal, es posible diagnosticar el tipo de falla específico usando el espectro de la señal de aceleración. Este esquema permitirála implementación de un sistema de monitoreo de bajo costo computacional en la etapa de identificación de la condición anormal y uno más sofisticado o elaborado para el diagnóstico del tipo de falla. Adicionalmente, es posible usar solo los indicadores estadísticos como umbrales de la condición normal y una vez se superen los valores preestablecidos se procede a la intervención del sistema a través de un mantenimiento correctivo.
REFERENCIAS
[1] A. El-Shafei, Gearbox Fault Diagnosis, Ritec. Cairo, Egypt, pp. 1-8, 2005. [ Links ]
[2] F.K. Choy, Analysis of the Effects of Surface Pitting and Wear of the Vibrations of a Gear Transmissions System, Tribology International, Vol. 29, no. 1, pp. 77-83, 1996. [ Links ]
[3] Abdulrahman S. et ál., A Review of Gearbox Condition Monitoring Based on vibration Analysis Techniques Diagnostics and Prognostics, Rotating Machinery, Structural Health Monitoring, Shock and Vibration, Vol. 5, pp. 307-324, 2011. [ Links ]
[4] Al-Arbi, Salem, et ál., Gearbox Fault Diagnosis based on Vibration Signals Measured Remotely, Key Engineering Materials, no. 413-41. pp. 175-180, 2009. [ Links ]
[5] Hasan O, et ál. (2010, Marzo 24). Detection and Advancement Monitoring of Distributed Pitting Failure in Gears, Springer Sciencie + Business Media, [En línea]. Disponible en XXXX. [ Links ]
[6] M. Amarnath, et ál., Detection and Diagnosis of Surface Wear Failure in a Spur Geared System using EEMD based Vibration Signal Analysis, Tribology International, Elsevier, Vol 61, pp. 224-234, 2013. [ Links ]
[7] P. Vecer, et ál., Condition Indicators for Gearbox Condition Monitoring Systems, Czech Technical University in Prague Acta Polytechnica, Vol. 45, No. 6, pp. 35-43, 2005. [ Links ]
[8] O. Mohammed, et ál., Vibration Signal Analysis for Gear Fault Diagnosis with various Crack Progression Scenarios, Mechanical Systems and Signal Processing, Elsevier, Vol. 41 no. 6, pp. 176-195, 2013. [ Links ]
[9] Al-Arbi,Salem, Condition Monitoring of Gear using Vibration Analysis. Ph.D, University of Huddersfield, 2012. [ Links ]
[10] M. Lebold, et ál., Review of Vibration Analysis Methods for Gearbox Diagnostics and Prognostics. Proceedings of the 54th Meeting of the Society for Machinery Failure Prevention Technology, Virginia Beach, VA, May 1-4, 2000, pp. 623634. [ Links ]
[11] Ó. Cardona, Análisis Tiempo-Frecuencia de Señales de Vibraciones Mecánicas para la Detección de Fallos en Máquinas Rotativas, MSc Thesis, Universidad Nacional de Colombia, 2011. [ Links ]

