











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. INTRODUCCIÓN
Las tecnologías de radar se utilizan con frecuencia tanto en entornos civiles como militares. Algunas de sus aplicaciones buscan el desarrollo de sistemas de navegación vehicular [1], la detección de minas antipersona [2]-[4], el diseño de nuevos sensores [5], el diseño de escáneres biomédicos [6], o el procesamiento de señales SAR (synthetic aperture radar) [7], [8], etc. Su desarrollo continúa avanzando gracias a los niveles de integración logrados por la electrónica de alta frecuencia y los avances en las técnicas de procesamiento de señales.
El estudio de las tecnologías de radar requiere de la profundización en los fenómenos electromagnéticos de la radiopropagación y del análisis del comportamiento de las señales de radiofrecuencia ante diversos tipos de materiales, al abordar conceptos físicos de la teoría electromagnética como, por ejemplo, las ecuaciones de Maxwell, las propiedades de los materiales y los efectos ópticos de las ondas de radio, entre otros. Llevar a la práctica estos conceptos, desde el punto de vista de la ingeniería, requiere, además de conocimientos y profundización en antenas, instrumentación en sistemas de comunicaciones y procesamiento de señales. En la academia, a nivel mundial, las tecnologías de radar, por lo general, se estudian durante una formación especializada en la que se parte de los análisis teóricos para, posteriormente, realizar simulaciones y, en algunos casos, pruebas de laboratorio. Sin embargo, se encuentran esfuerzos que buscan incrementar el interés de los estudiantes hacia el área de la teoría electromagnética y sus aplicaciones. Un ejemplo es el laboratorio Lincoln del Instituto Tecnológico de Massachusetts. Allí se imparte un curso de radar [9] en el que los estudiantes, además de estudiar los conceptos teóricos, construyen un radar de bajo costo que les permite realizar mediciones y experimentar en diversos ambientes para, posteriormente, analizar las señales en el aula.
En este sentido, la evolución de la tecnología de radio definido por software (SDR) ha impulsado el desarrollo de avanzados sistemas de radiocomunicación a un bajo costo [10], lo cual ha permitido que conceptos abstractos puedan implementarse fácilmente mediante dispositivos hardware reconfigurables. La Unión Internacional de Telecomunicaciones define la tecnología de radio definido por software (SDR) en los siguientes términos:
Un transmisor y/o receptor radioeléctrico que utiliza una tecnología que permite fijar o modificar mediante programas informáticos los parámetros de funcionamiento de RF, incluidos, entre otros, la gama de frecuencias, el tipo de modulación o la potencia de salida, salvo los cambios de los parámetros de funcionamiento que se producen durante el funcionamiento normal preinstalado y predeterminado de un sistema radioeléctrico con arreglo a una especificación del sistema o a una norma. [11]
La flexibilidad de los sistemas SDR permite que una misma plataforma hardware se pueda emplear para la implementación de diversos tipos de tecnologías de comunicación. En [12] y [13] se describe su origen, su evolución y el impacto que ha tenido esta tecnología durante los últimos años. Asimismo, en [12] se describe un método para la implementación de un radar FMCW en ambientes cerrados. El método desarrollado permite corregir errores y reducir las reflexiones ocasionadas por objetos estáticos. En la implementación se utilizó Matlab, Smulink, GNU Radio y un radio USRP. Los resultados obtenidos muestran una mejora en la exactitud de la detección respecto a otros métodos convencionales. Ahora bien, en [15] los autores presentan una implementación de la técnica stepped frequency radar, en la cual se utilizaron saltos de frecuencia con el fin de incrementar el ancho de banda de los dispositivos USRP. En [16] se describe la implementación de un radar de vigilancia FMCW empleando una USRP B210 y GNU radio; el sistema desarrollado permite la detección de drones en un rango de hasta 150 m. En [17] se presenta una metodología que permite detectar la presencia de objetos en movimiento a partir del análisis de la señal dópler en el dominio de la frecuencia, empleando la técnica FMCW a 1GHz con una antena Logo periódica. En [18] se describe la arquitectura de diseño de un sistema básico de radar de onda continua modulada (FMCW) para aplicaciones climáticas utilizando GNU Radio y el hardware USRP N210 en la frecuencia de 2,1 GHz. El desarrollo de un sistema de radar pasivo se describe en [19], en el cual el procesamiento de las señales permite realizar el seguimiento de un objeto empleando un arreglo de antenas conmutadas de forma digital. Por su parte, [20] presenta el diseño e implementación de un sistema de radar pasivo utilizando señales wifi para identificar los patrones de señal dópler que produce el movimiento del cuerpo humano. El sistema permite identificar algunos gestos de una persona al mover los hombros, los brazos o las manos; el uso de este tipo de aplicación abarca escenarios tales como la interacción humano-máquina y el cuidado médico.
Ahora bien, GNU radio [21] es una herramienta software que contiene los elementos necesarios para crear múltiples arquitecturas en el procesamiento de señales de radio. En la actualidad cuenta con un gran número de toolboxes especializadas en tecnologías, como, por ejemplo, comunicaciones satelitales, DVB-TV y radar, entre otros. Stefan Wünsch, del Instituto de Tecnológico de Karlsruhe en Alemania [22], implementó una librería de radar para GNU Radio en el 2014. La librería incluye componentes programables empleados en las arquitecturas de radar tales como CW, FMCW, FSK y Múltiple CW. Su trabajo fue presentado en la conferencia mundial de GNU Radio del 2014 y, posteriormente, la librería se incluyó en la plataforma GNU Radio desde su versión 3.7.4.
Este artículo presenta los resultados de la implementación de prototipo de radar de onda continua múltiple (Múltiple CW), el cual permite medir distancia y velocidad utilizando tecnología de radio definido por software. El sistema de radar está compuesto por dos USRP N210 con tarjetas hijas XCVR 2450, con una frecuencia de operación de 2,45 GHz, dos antenas bocina HF 907 y un GNU Radio versión 3.7.4 instalado en el sistema operativo Linux Mint 17.1, junto con la librería gr-radar. En este documento se presentan los resultados de la medida de distancia y velocidad de una persona caminando frente al radar en un trayecto de 25 m de ida y regreso. Al tener en cuenta las mediciones realizadas, se encontró que la relación entre la velocidad medida por el radar y la obtenida mediante la relación tiempo-desplazamiento tiene un error promedio de 2,6 %. Para la estimación de posición se obtuvo un error promedio de 2 %, al tener en cuenta los desplazamientos de ida y regreso. Los resultados obtenidos son un aporte importante a la comunidad académica interesada en el estudio de las tecnologías de radar, ya que evidencia cómo es posible implementar un sistema de radar flexible con un alto desempeño y a un bajo costo.
El artículo se encuentra organizado de la siguiente forma: primero, se describen los aspectos teóricos básicos de las tecnologías de radar de onda continua, onda continua modulada y onda continua múltiple; posteriormente, se describen el montaje y los experimentos realizados, así como el sistema de bloques desarrollado en GNU Radio; finalmente, se presentan y discuten los resultados.
2. MATERIALES Y MÉTODOS
Tecnologías de radar
Radar de onda continua (CW)
También conocido como "radar dópler", permite medir la velocidad de un objeto en movimiento. Su funcionamiento se basa en encontrar las variaciones en la frecuencia ocasionadas por el objeto reflectante; esta variación se conoce como "frecuencia dópler" [23]. La relación entre la velocidad y la frecuencia dópler se observa en la ecuación 1, en la que f d corresponde a la frecuencia dópler (H Z ), va la velocidad del objetivo (m/s), Ca la velocidad de la luz (m/s) y f o a la frecuencia de transmisión (HZ ).
Una de las falencias del radar de onda continua es su imposibilidad para determinar la ubicación del objeto en movimiento.
Radar de onda continua modulada (FMCW)
Con en este tipo de radar, además de medir la velocidad de un objeto, es posible encontrar su posición. Para el desarrollo de esta técnica se requiere determinar la frecuencia dópler, el retardo de la señal y la duración del cambio de frecuencia en la trasmisión [24]. La señal que se transmite sufre un cambio de frecuencia de manera periódica asemejándose a una señal modulada en FM [25].
Radar de onda continua múltiple (Múltiple CW)
Empleando múltiples frecuencias, es posible determinar de manera óptima los valores de distancia sin tener que recurrir a la técnica FMCW [26].
A fin de entender este concepto se consideran dos señales:
La señal reflejada en un objeto localizado a una distancia R es:
Donde la fase φ es igual a:
Luego del proceso de mezclado de estas dos señales con la frecuencia portadora (heterodinaje), la diferencia corresponde a:
Al resolver R se tiene:
Para determinar el máximo valor que R puede alcanzar, se maximiza la ecuación (8) cuando ΔΦ=2Π; por tanto, el máximo rango no ambiguo es:
Implementación del radar de onda continua múltiple definido por software
En la figura la se puede apreciar el sistema conformado por dos USRP N210 con tarjetas de radio XCVR-2450. Cada USRP se conectó a una antena bocina tipo HF 907 (Roh-de & Schwarz), instalada a 1,5 metros sobre un trípode de madera. Se emplearon dos módulos de conversión fibra-GigaEthernet para extender hasta 20 m la instalación del computador. Se utilizó un cable MIMO para la interconexión entre las USRP, lo que permitió emplear solo un puerto ethernet para la comunicación con el computador de control. Asimismo, se instaló GNU Radio en su versión 3.7.4 sobre el sistema operativo Linux Mint versión 17.1.
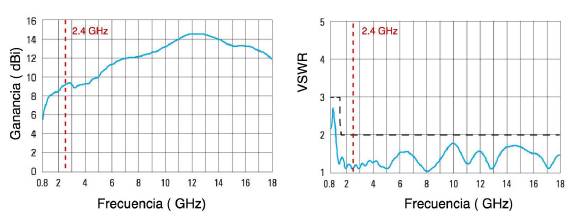
Para el diseño del sistema de radar se seleccionaron las antenas de acuerdo con las características de directividad y ancho de banda. Según la figura 2, se observa el comportamiento de estos parámetros con respecto a la frecuencia, en la que cada una de estas antenas cuenta con una ganancia aproximadamente 9dBi y un VSWR de 1,2 a 2,4GHz.
A fin de comprobar el funcionamiento del sistema se realizó el montaje del radar en un sitio abierto sin la presencia de obstáculos en un espacio con 30 m libres frente a las antenas del radar. En la figura 1b se identifican conos de color naranja que sirvieron como referencia de distancia durante las pruebas. Se ubicó una persona frente al radar, quien se alejó progresivamente hasta alcanzar una distancia máxima de 30 m. El recorrido desde el punto A hasta el punto B se consideró como el desplazamiento de ida; desde el punto B hasta la distancia máxima se estableció una zona muerta donde el radar no pudo detectar objetos estacionarios o en movimiento. El recorrido desde el punto C hasta el punto D se consideró el trayecto de regreso. Durante los experimentos la persona encargada de realizar el recorrido sostuvo una placa metálica cuadrada de 30 cm. Las medidas de velocidad y distancia se registraron en un archivo de texto.
Implementación de software mediante GNU Radio
La figura 3 muestra el diagrama de bloques utilizado en el sistema de radar de onda continua múltiple. La generación de las señales CWi y CW2 se realiza en el bloque A y utiliza dos bloques signal generator en GNU Radio configurados con una frecuencia central de 2,45 GHz. CW1 se parametriza para enviar una señal a 2,447 GHz y CW2 a 2,453 GHz. La diferencia de frecuencias entre ellas es de 6 MHz y corresponde al parámetro Δf de la ecuación (9). Empleando esta ecuación, se encuentra la distancia o rango máximo del radar que para un Δf de 6 MHz es de 25 m.
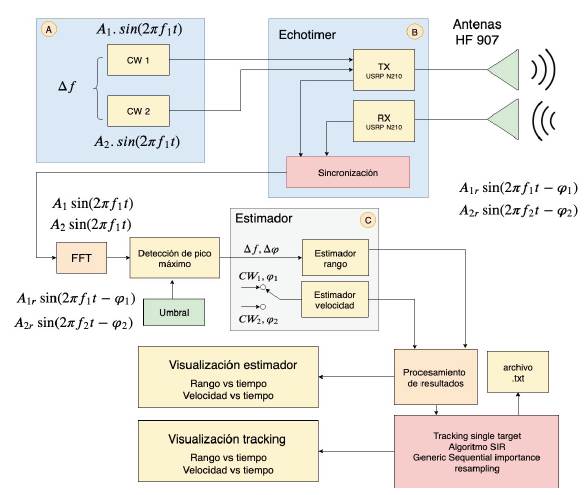
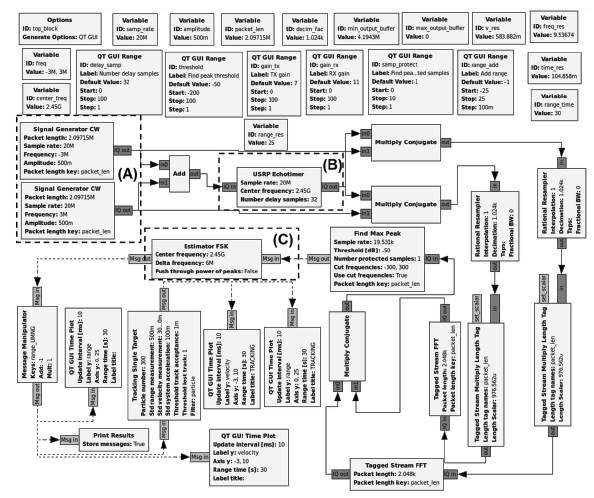
Se puede observar que los bloques de generación de señales (signal generator CW) se interconectan al bloque Echotimer (bloque B). El programa calcula la FFT tanto de las señales transmitidas como de las recibidas y su resultado pasa al detector de picos [27] en el que se compara con un nivel de umbral escogido por el usuario. El detector de picos entrega como resultado al estimador (bloque C) los valores de frecuencia y fase que sobrepasan el umbral establecido. Para la estimación de rango se emplean las diferencias de frecuencia (Δf) y fase (Δφ), tal como lo establece en la ecuación (8). A fin de obtener velocidad se puede utilizar cualquiera de las señales CWi ó CW2 junto con su correspondiente frecuencia dópler (Ф1 o Ф2), de acuerdo con la ecuación (1). La variación de la velocidad y la distancia respecto al tiempo se obtiene a través de la aplicación de algoritmo SIR (generic sequential importance sampling) [28]. Los resultados finales de rango y velocidad se visualizan respecto al tiempo y se guardan, además, en un archivo de texto. En la figura 4 se muestra la implementación realizada en GNU Radio.
Los parámetros utilizados para la configuración del bloque echotimer (USRP Echotimer) se observan en la figura 5. Allí se establecen las direcciones IP de cada USRP junto con la ganancia de transmisión (máximo 20 dBm). La variable delay_samp controla la sincronización entre las dos USRP; este valor permite que la señal de sincronismo del receptor se ajuste a la señal de sincronismo del transmisor. La sincronización es necesaria para minimizar los errores en las mediciones.
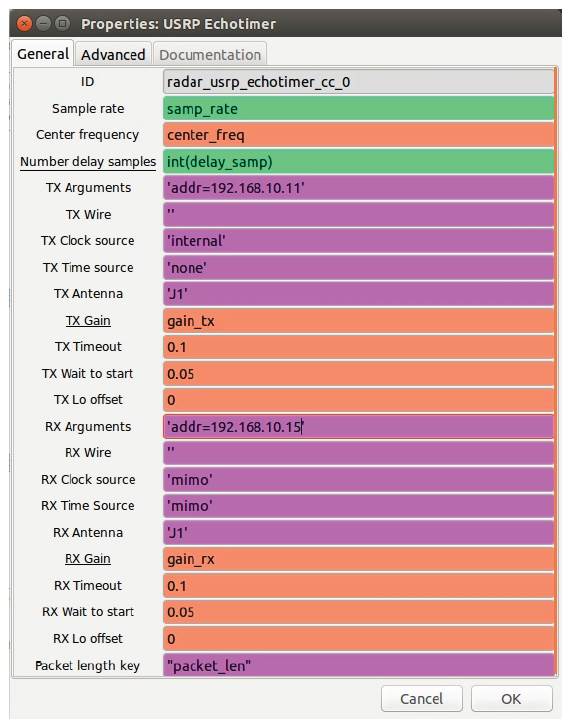
El sistema final se configuró con los siguientes parámetros: tasa de muestreo (samp_ rate) de 2 MS/s; frecuencia central (center_freq) de 2,45 GHz; treinta y dos muestras retardadas para la sincronización de las USRP (delay_samp); fuente de reloj interna; ganancia de transmisión (gain_tx) de 11 dB; timeout(Rx timeout) de 0,1 s; y tiempos de espera para inicio del transmisor y receptor (Rx Wait to start) de 0,05 segundos.
3. RESULTADOS Y DISCUSIÓN
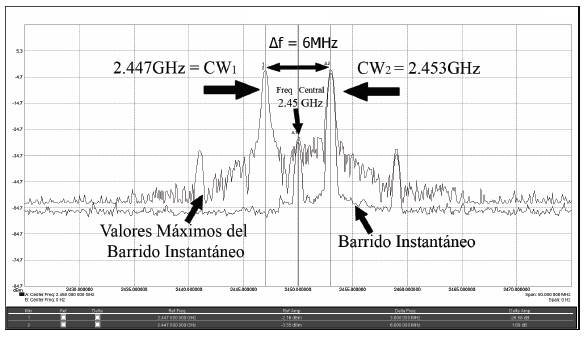
La figura 6 muestra la señal generada por la USRP N210 transmisora, obtenida mediante un analizador de espectros Anritsu MS2724B. En ella se identifican las componentes de frecuencia (f1 y f2), generadas por cada uno de los bloques signal generator CW. Se observa que estas frecuencias aparecen en 2,447 GHz y 2,453 GHz y tienen una separación de 6 MHz alrededor de la frecuencia central de 2,45 GHz. Esto se corresponde con los valores esperados en la configuración y el diseño del sistema de radar.
La figura 7 muestra los resultados del experimento de un trayecto realizado durante un periodo de 55 s. Desde el segundo cuarenta (Punto A), se observa cómo inicia la variación del rango, comprendido desde 0 cm hasta 25 m (Punto B); posteriormente, se encuentra una zona muerta de aproximadamente 5 s en la que el radar no registra ningún valor (Punto B hasta el punto C). Esta zona corresponde al tiempo que tardó la persona en caminar desde el límite de alcance máximo del radar (25 m) hasta el punto de referencia ubicado en 30 m y regresar. Desde el segundo 67 (Punto C) hasta el segundo 90 (Punto D), el radar detecta el regreso del caminante y se observa cómo la distancia varía desde 25 m hasta aproximadamente 0 m.
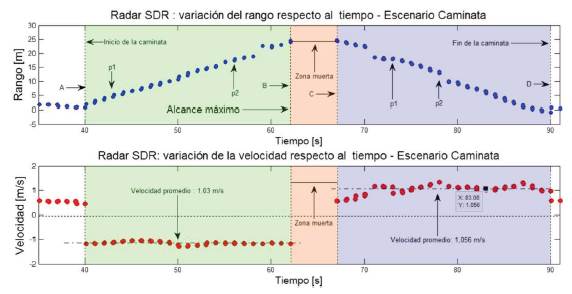
La figura 7 muestra además una variación en la velocidad respecto al tiempo, calculada directamente por las mediciones del sistema de radar. Se observa que el sistema reporta una velocidad inicial con la persona estática de aproximadamente 0,5 m/s, y este valor cambia al iniciar el trayecto. Cuando la persona se aleja del radar la magnitud de la velocidad es negativa, pero si se acerca, el signo en la magnitud de la velocidad es positivo; este signo es un indicador del sentido de desplazamiento.
En la tabla 1 se muestra que durante el trayecto de ida (A hasta B) la velocidad experimental calculada por el algoritmo de la librería de radar fue de un promedio de -1,03 m/s. Para el trayecto de regreso (C hasta D) el comportamiento de la velocidad experimental varía alcanzando un valor promedio de 1,056 m/s. Al tomar dos puntos ( y ) de la variación de distancia recorrida respecto al tiempo empleado, se calcularon las velocidades teóricas y se encontró un error de 1,98 % para el trayecto de ida, y de 3,22 % para el trayecto de regreso.
TABLA 1 ERROR EN LA ESTIMACIÓN DE LA VELOCIDAD PARA EL EXPERIMENTO DE PERSONA CAMINANDO

Fuente: elaboración propia.
Por otra parte, en la tabla 2 se muestran los resultados de las distancias experimentales obtenidas durante el recorrido de 30 m (véase la figura la). En el trayecto de ida se puede observar que los datos obtenidos experimentalmente difieren en promedio en un 1,56 % de las distancias reales. Asimismo, para el trayecto de regreso el promedio del porcentaje de error es del 2,75 %.
TABLA 2 ERROR EN LA ESTIMACIÓN DE LA DISTANCIA PARA EXPERIMENTO DE PERSONA CAMINANDO
Fuente: elaboración propia.
Trabajo futuro
Se espera desarrollar un conjunto de pruebas con objetos en movimiento como, por ejemplo, bicicletas o vehículos, lo que permita comprobar la efectividad del radar con objetos que se desplacen a alta velocidad. Se espera, además, evaluar la relación entre el ancho de banda transmitido (Δf y el rango máximo del sistema de radar. También se considera importante implementar y evaluar otras técnicas tales como el radar de onda continua (CW) y el radar de onda continua modulada (FMCW).
4. CONCLUSIONES
Durante el desarrollo de la implementación del sistema se evalúo con éxito el desempeño del radar definido por software utilizando la técnica de radar de onda continua múltiple, de modo que se detectó el rango y la velocidad de una persona en movimiento a baja velocidad, quien sostiene una superficie reflectora metálica; se obtuvo un error promedio menor al 3,5 %.
La librería gr-radar para GNU Radio permite la implementación de un radar flexible de bajo costo para uso académico e investigación; es una alternativa importante si se considera su versatilidad y el alto costo de los sistemas de radares didácticos existentes en el mercado.
La sincronización entre las URSP que se logra al ajustar en la variable delay_samp es de gran importancia para el funcionamiento del sistema, ya que permite la calibración de las magnitudes de rango y velocidad. Es necesario desarrollar una metodología de calibración que optimice este proceso.
Los resultados obtenidos evidencian que el sistema de radar implementado no es eficiente en determinar la distancia cuando los objetos se encuentran estacionarios. El sistema entrega datos erróneos y, para estos casos, deben ser descartados. Se debe estudiar el fenómeno y realizar comparaciones con otras técnicas de radar como, por ejemplo, FMCW y radar de pulsos.
Durante las pruebas realizadas se evidenció que es necesario generar una señal o alarma de límite de rango que indique al usuario que el sistema sigue funcionando correctamente, y para que no se generen problemas al momento del procesamiento de las señales.
Se encontró una diferencia entre las pruebas realizadas con una persona caminando sin ningún tipo de plano reflector. Si bien era posible detectar la posición del caminante, las magnitudes de rango y velocidad oscilaban de forma constante. con la superficie reflectora empleada en las pruebas presentadas en este documento se obtuvo una variación muy pequeña en las magnitudes entregadas por el sistema, lo que permitió medir de forma eficiente los parámetros de magnitud y velocidad.
Durante las pruebas realizadas se encontró que el valor límite teórico calculado a partir del ancho de banda ocupado por la señal transmitida (Af = 6MHz) concuerda cuando la persona sobrepasa dicho valor en su recorrido, lo que permite demostrar de forma experimental el efecto que tiene cuando se realiza algún cambio en este parámetro de transmisión.

