











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
Permalink1. INTRODUCCIÓN
El uso de ensayos a escala real para obtener la respuesta dinámica de las estructuras es una práctica que ha tomado gran auge en los últimos años [1], [2], [3], [4]. Esta técnica ha sido empleada, sobre todo, en la identificación de sistemas y la estimación experimental de los parámetros modales, la identificación de daños [5], [6], [7] y la optimización de diseños [8], así como en la identificación de fuerzas [9]. Otra de sus aplicaciones se encuentra en la calibración de modelos computacionales, ya que el desarrollo de nuevos materiales y la evolución en el diseño de las estructuras obliga a la verificación de las simplificaciones realizadas en los modelos [10], [11], [12], [13].
En el marco de la identificación de sistemas, el análisis modal operacional (OMA, por sus siglas en inglés) permite caracterizar de forma dinámica una estructura a partir de la obtención sus parámetros modales (frecuencias de oscilación, razones de amortiguamiento y formas modales), sin conocer la fuerza actuante en esta. La ventaja de esta técnica es que la estructura se ensaya en su operación normal. Una variante de esta técnica es el análisis modal operacional con entrada exógena (omax, por sus siglas en inglés), en la cual se aplica una excitación conocida a la estructura en condiciones operacionales [14].
El análisis modal operacional se basa en tres supuestos: la respuesta del sistema es lineal, el proceso es estacionario y una buena observación. La buena observación se garantiza mediante la ubicación de los sensores de forma adecuada (acelerómetros y strain gauges), diseñada para observar los modos de interés y evitar así puntos nodales. Para el OMA, la estructura se excita ante cargas desconocidas, en condiciones de operación, y se denomina el sistema como "excitado bajo ruido blanco". Bajo este supuesto, la respuesta medida se puede interpretar como la combinación del sistema de salida ante la acción de ruido blanco gaussiano, con media cero y desviación estándar constante.
Los parámetros modales de la estructura se obtienen por medio se sensores (aceleróme-tros y strain gauges) correctamente ubicados con el propósito de cumplir con la buena observación. Una de las técnicas que permite verificar la correcta ubicación de sensores son los valores AutoMAC. El análisis se realiza, básicamente, a partir de una premedi-ción y mediante un modelo computacional de la estructura, se seleccionan puntos de la estructura y se utiliza el modelo computacional a fin de verificar si son correctos.
El criterio de garantía modal (MAC, por sus siglas en inglés) es la forma numérica más usada para cuantificar la correlación entre modos [15], [16], [17]. Se puede emplear para relacionar formas modales medidas y formas modales obtenidas computacio-nalmente , como una herramienta en la calibración de modelos.
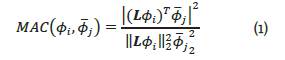
En la expresión (1) el vector se encarga de seleccionar los mismos grados de libertad de las formas modales medidas y las computacionales con el fin de comparar. Los valores MAC muestran relación entre vectores y sus valores se encuentran entre cero y la unidad, lo que representa una mala o buena relación entre los vectores, respectivamente.
Los valores AutoMAC permiten verificar si es correcta la elección de posiciones de sensores. Dichos valores relacionan un conjunto de posiciones medidas, de ahí el término auto. La matriz AutoMAC es una matriz simétrica caracterizada por valores iguales a la unidad en su diagonal. Esta matriz permite relacionar las formas modales obtenidas en diferentes puntos de una estructura. De esta manera, si se selecciona un conjunto de puntos y su valor AutoMAC es cercano a la unidad, significa que el conjunto de puntos seleccionados está captando el mismo modo, lo cual no es conveniente. De forma inversa, si los valores son cercanos a cero significa que el conjunto está captando modos diferentes, lo que es una buena selección de puntos para la colocación de los acelerómetros. De forma numérica, se puede decir que se están captando modos diferentes si se obtienen valores de AutoMAC menores a 0,5 [9].
En este trabajo se describe la metodología que permite la realización del OMA y el Omax en una torre autosoportada de sección cuadrada. Se presenta el estudio de sensibilidad para la colocación de acelerómetros usando los valores AutoMAC y el procedimiento de medición en el campo.
2. ESTUDIO DE SENSIBILIDAD PARA LA COLOCACIÓN DE ACELERÓMETROS
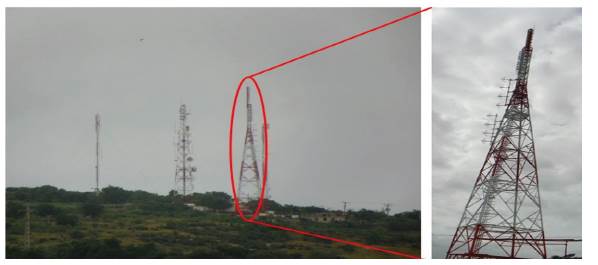
La elección de la posición de los sensores se basa en el estudio de las formas modales de la estructura, en este caso una torre autosoportada. El modelo de torre que se analiza corresponde a una torre existente. La torre tiene forma troncopiramidal desde la base hasta los 38,5 m, punto a partir del cual se desarrolla la sección constante de 1,1 x 1,1 m hasta los 50,5 m. Las dimensiones de la sección transversal en la base son de 8,9 x 8,9 m (véase la figura 1).
Los elementos componentes de la torre son: columnas, diagonales principales, tranques secundarios, diagonales secundarias (estas últimas junto con los tranques secundarios conforman el sistema de arriostramiento de las diagonales principales), tranques y tranques interiores. Las secciones son perfiles de acero angulares, canales y planchas metálicas de secciones con diferentes dimensiones.
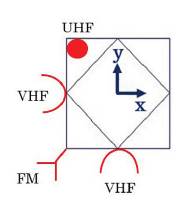
El acero tiene una resistencia a fluencia de y el módulo de elasticidad del material o módulo de Young es de La torre tiene antenas modelo VHF y UHF que fueron representadas en el modelo por masas concentradas en los nodos a las alturas correspondientes (véase la figura 2). El análisis modal de la torre se realizó mediante SAP 2000 en su versión 16.
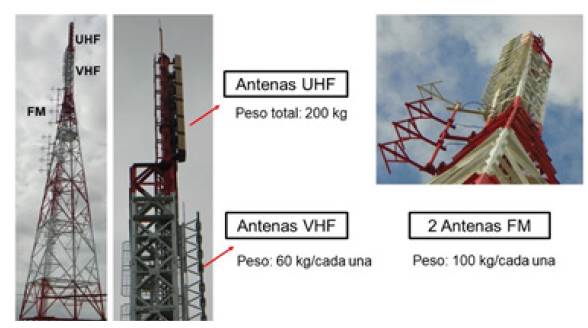
Del análisis modal de la estructura se obtuvieron las características dinámicas de la modelación de la torre (frecuencias naturales y tipo de formas modales). La tabla 1 muestra los primeros cuatro modos de vibración que arroja el programa que conforman los dos primeros modos a flexión de la estructura y contienen los mayores por-cientos de participación de la masa. Los modos numerados como 1 y 2 (ortogonales) corresponden al primer modo a flexión, y los modos 3 y 4 el segundo modo a flexión. Los restantes modos son locales y con muy bajo porcentaje de participación de la masa. Las diferencias entre las frecuencias de los modos acoplados se deben a que la torre no es completamente simétrica en la distribución de antenas, dada la ubicación de las antenas UHF en el mástil (véase la figura 3). Las antenas VHF se encuentran desde los 42 m hasta el nivel de 48 m, y las FM desde 24 m hasta 39 m.
TABLA 1 CARACTERÍSTICAS DINÁMICAS DE LA TORRE (EJES DE COORDENADAS REFERIDOS A LA FIGURA 3)
Fuente: elaboración propia.
Fuente: elaboración propia.
FIGURA 3 DISTRIBUCIÓN DE ANTENAS EN LA SECCIÓN TRANSVERSAL DE LA TORRE Y EJES DE COORDENADAS
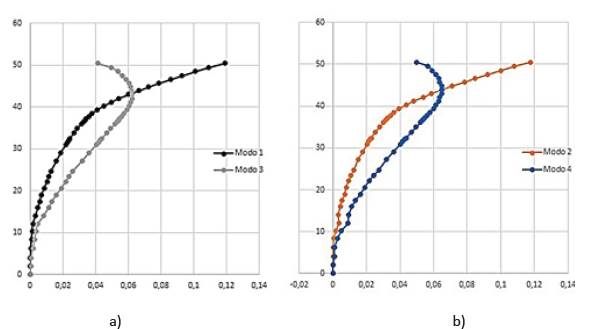
A fin de colocar los sensores en estructuras, el primer paso es realizar la inspección de las formas modales e identificar los puntos nodales donde no es conveniente colocar los sensores. En el propósito de realizar este análisis se empleó la figura 4, la cual muestra las formas modales para dichos modos del análisis en SAP 2000.
Fuente: elaboración propia.
FIGURA 4 MODOS FLECTORES DE OSCILACIÓN DE LA TORRE AUTOSOPORTADA. A) MODOS DE OSCILACIÓN EN x; B) MODOS DE OSCILACIÓN EN Y
La figura 4 muestra en los primeros 20 m de la torre formas modales muy similares, de modo que resulta inadecuado colocar sensores, ya que no se podrá identificar luego qué modo están captando los sensores. En la altura de aproximadamente 43 m existe un solape entre los modos en ambos sentidos, y en el caso del segundo modo aparece el cruce característico de este tipo de estructuras. Se eligieron posiciones fuera de estas coincidencias y equidistantes en las alturas de 22,2 m, 33,8 m, 38,5 m y 50,5 m, valores de altura específicos que se corresponden con puntos donde existen tranques y se colocarán físicamente los acelerómetros. En estas alturas se eligieron los puntos a medir, en este caso tres puntos de la sección transversal en dos alturas (33,8 y 41,2 m), uno de ellos en ambas direcciones y , y en dos alturas en cuatro puntos (22,2 y 50,5 m). Esto significa que se miden cuatro grados de libertad por nivel (dos en xy dos en y) para un total de dieciséis puntos en toda la torre (véase la figura 5). Con estas posiciones se procede a realizar el análisis de los valores AutoMAC y validar las posiciones elegidas producto del análisis modal.
Fuente: elaboración propia.
FIGURA 5 DISTRIBUCIÓN DE LOS SENSORES POR NIVEL Y UBICACIÓN DE LAS REFERENCIAS
La matriz AutoMAC permite relacionar las formas modales obtenidas en diferentes puntos de la torre. La obtención de dichos valores se realiza mediante el programa MatLab y su interacción con SAP 2000. El SAP 2000 realiza el análisis modal y MatLab se encarga de extraer las coordenadas modales en los puntos seleccionados para la colocación de los sensores, así como realiza el cálculo de los valores AutoMAC empleando la ecuación (1).
La figura 6 muestra la matriz AutoMAC para las posiciones elegidas. La numeración en las filas y las columnas representa los modos elegidos para el análisis, en este caso los cuatro primeros. La matriz muestra el nivel de correlación que existe entre los modos a partir de los puntos elegidos para colocar los sensores.
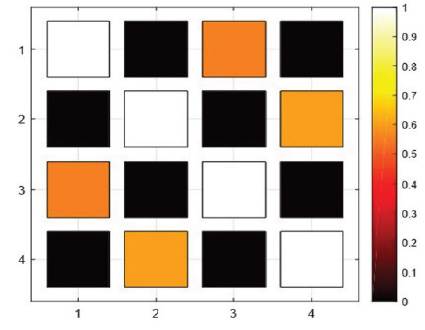
La matriz AutoMAC es una matriz simétrica con valores iguales a la unidad en su diagonal porque estos puntos corresponden a la autocorrelación entre un mismo modo. Los valores fuera de la diagonal deben ser cercanos a cero, lo que indica que existe baja correlación entre los modos y que los puntos elegidos no captan los mismos modos. En este caso, como se observa en la figura 6, los valores fuera de la diagonal se encuentran entre o y 0,6, aproximadamente (según la escala de colores), lo que significa que las posiciones de los sensores elegidas captan modos diferentes.
Diseño de setups
En el caso que se presenta solo se dispone de diez acelerómetros para cubrir dieciséis posiciones de sensores, por lo que la forma de realizar las mediciones y cubrir todas las posiciones es realizar dos etapas de mediciones denominados "setups". Se diseñaron dos setup: en el primero se adquirieron los datos de los diez sensores ubicados de la siguiente manera: cuatro sensores en el nivel 50,5 m, cuatro en el nivel 41 m y dos sensores en el nivel 33 m (véase la figura 5); en el segundo se adquirieron los datos de los diez sensores ubicados: cuatro en el nivel 41 m (referencias), cuatro en el nivel 22,2 m y dos en el nivel 33 m (véase la figura 5). El diseño de los setups realizados, así como los datos de los sensores, se encuentran en la tabla 2. La penúltima columna de la tabla representa la numeración del nodo, el sentido y la dirección de medición del sensor. Los acelerómetros se fijan en la estructura con imanes en los lugares seleccionados de la torre (véase la figura 7). Los acelerómetros empleados tienen una sensibilidad de 10 000 mV/g y un rango de frecuencia entre 0,15 y 1000 Hz, intervalo en el que se encuentran las frecuencias de oscilación de la torre.
TABLA 2 DISEÑO DE LOS SETUPS, POSICIONES Y DATOS DE LOS SENSORES. REF: SENSORES DE REFERENCIA, MOV: SENSORES QUE SE MUEVEN, MAR: MARTILLO
Fuente: elaboración propia.

Se realizaron dos tipos de mediciones: OMA, al medir la torre solo bajo la acción del viento y en operación, y con la disposición de un martillo de campo para excitar la estructura el Omax, que se basa en la generación de una excitación exógena (golpes del martillo) bajo condiciones operacionales de la torre. Esta técnica se aplicó con la misma distribución de sensores que el OMA, pero la diferencia radica en la adición de la fuerza de martillo, la cual se aplicó en el nivel 33,8 m, donde existen sensores que permiten relacionar, y además una plataforma de apoyo para el operario que aplica la fuerza a la torre. La excitación del martillo se aplica durante diez minutos (cinco minutos en dirección xy cinco minutos en dirección y).
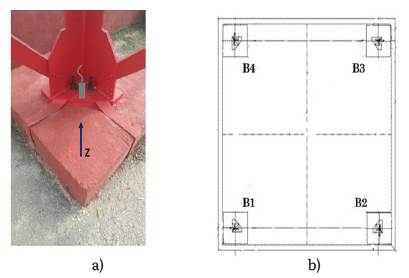
El tercer setup se realizó con el objetivo de verificar la interacción entre la estructura y los cimientos. Se diseñó un setup con un sensor en cada una de las cuatro bases de columnas (Bi, B2, B3 y B4) y en dirección vertical (véase la figura 8a y la tabla 3). Se eligieron como referencia los puntos en el nivel 41 m de la torre (estos se mantienen fijas para luego combinar los setups). La nomenclatura de la columna 4, para la primera tarjeta, está referida a los cuatro apoyos de la torre (véase la figura 8b).
TABLA 3 DISEÑO DEL SETUP CON MEDICIÓN EN LA BASE. REF: SENSORES DE REFERENCIA, MOV: SENSORES QUE SE MUEVEN. MAR: MARTILLO
Fuente: elaboración propia.
FIGURA 8 SETUP 3. A) COLOCACIÓN DEL SENSOR EN EL APOYO DE LA COLUMNA; B) DISTRIBUCIÓN DE LOS APOYOS EN LA SECCIÓN TRANSVERSAL DE LA BASE
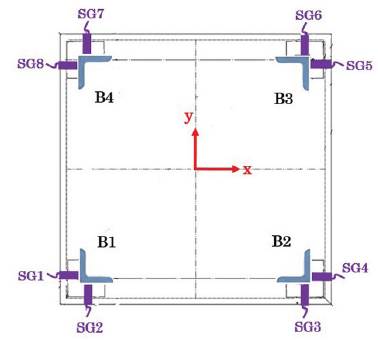
También se colocaron strain gauges, los cuales pueden utilizarse para estimar las características dinámicas de la torre en conjunto con las señales de los acelerómetros (véase la figura 9). Un strain gauge es un sensor que mide la deformación longitudinal según la dirección que se coloque (el esfuerzo que deforma el strain gauge produce una variación en su resistencia eléctrica). Los strain gauges se colocaron en la parte inferior de las cuatro columnas de la torre adosados a las caras externas del perfil de alas iguales. En total, se utilizaron ocho strain gauges (la figura 10 muestra su distribución transversal y la forma de conexión a la torre). Las señales de los strain gauges también pueden utilizarse para estimar las fuerzas que surgen en la base de la torre.

3. SISTEMA DE ADQUISICIÓN DE DATOS
Las mediciones se realizan empleando un sistema de adquisición de datos del National Instrument (NI), con cinco tarjetas de cuatro canales cada una. La frecuencia de muestreo se tomó igual a 1,651 Hz, lo que corresponde al sistema de adquisición de datos NI utilizado. Este valor cumple con las recomendaciones de ser mayor de cinco veces la frecuencia más grande de interés (en este caso la frecuencia más grande de interés en la estructura es 5 Hz). Las tres primeras tarjetas del sistema de adquisición de datos se utilizan con el fin de medir aceleración (de estas la primera contiene las referencias, la cuarta y la quinta tarjeta se utilizan para conectar los strain gauges).
El periodo de medición depende del tipo de técnica que se realice. Para el análisis modal operacional este tiempo debe ser 1000 veces el periodo fundamental de la estructura [18], [19]. La torre estudiada tiene un periodo fundamental de 0,56 segundos, lo que implica que se mida durante 600 segundos en cada setup.
4. SEÑAL ADQUIRIDA E IDENTIFICACIÓN DEL SISTEMA
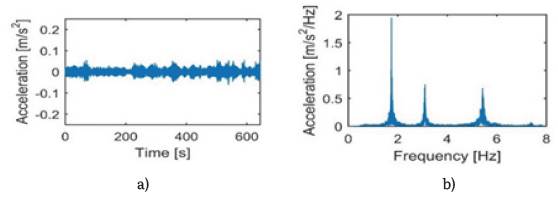
Con la distribución de sensores establecida de acuerdo con el diseño de los setups, se obtienen las señales según la técnica definida. Dichas señales fueron procesadas con MACEC 3,3 [20], herramienta de MatLab desarrollada por la Universidad Católica de Lovaina para el procesamiento de señales y la caracterización dinámica de estructuras. La señal obtenida en un acelerómetro en el tope de la torre a la altura de 50,5 m, según el espectro de frecuencias y el time history, se puede observar en la figura 11. En el espectro de frecuencias se pueden observar tres picos que se interpretan como las frecuencias naturales de oscilación de la torre.
Fuente: elaboración propia.
FIGURA 11 SEÑALES ADQUIRIDAS EN EL ACELERÓMETRO 609 EN LA ALTURA DE 50,5 M. A) TIME HISTORY; B) ESPECTRO DE FRECUENCIAS
Las señales obtenidas para cada setup del OMA (aceleración y deformaciones) fueron procesadas aplicando el método del subespacio estocástico (SSI por sus siglas en inglés) [21], [22], [23]. Fue aplicado a las señales el filtro de paso alto de tipo Butterworth de quinto orden con una frecuencia de corte de 0,5 Hz, cuyo objetivo es eliminar componentes de baja frecuencia de las señales contaminadas por el ruido de medición. Las formas modales se identificaron por separado para cada setup, y luego se combinaron con el fin de obtener las formas modales globales de la torre. Las frecuencias naturales y las razones de amortiguamiento se promediaron.
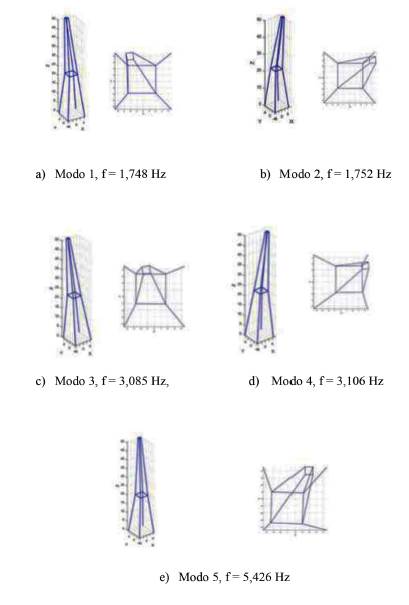
La figura 12 muestra cinco formas modales; los modos 1 y 2 con frecuencias de 1,748 y 1,752 Hz, respectivamente, son modos acoplados a flexión con valores muy similares de frecuencias naturales. Las diferencias se deben a la asimetría de ubicación de antenas en la torre. El mismo comportamiento se verifica para los modos 3 y 4 con frecuencias de 3,085 y 3,106 Hz, respectivamente. El modo 5 es, principalmente, un modo flector en dirección diagonal. Las razones de amortiguamiento obtenidas del procesamiento para los modos del 1 al 5 se muestran en la tabla 4.

La figura 13 muestra la matriz MAC de las formas modales identificadas. Al contrario de la figura 6, la cual muestra la matriz AutoMAC y permite identificar que las posiciones elegidas para la colocación de los acelerómetros captan modos diferentes, esta matriz relaciona las formas modales identificadas.
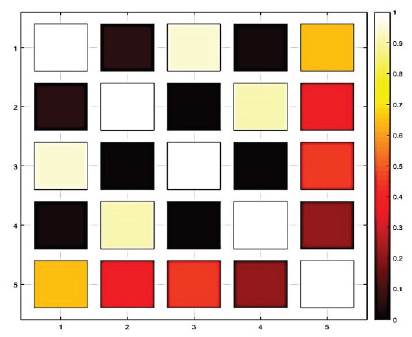
En la matriz se muestran valores muy cercanos a la unidad entre los modos 1 y 3, 2 y 4 (color amarillo) lo que significa que estas formas modales son similares en cuanto a su forma de oscilación. Mientras que a través de la matriz (figura 13) se puede verificar que los valores de frecuencias naturales se encuentran bien separados, lo que significa que son modos diferentes. En el caso del modo 5 se concluye que su forma de oscilación tiene poca relación con los restantes modos, lo que también se verifica en los valores de frecuencias naturales.
5. CONCLUSIONES
Este trabajo describe la instrumentación a escala real de una torre autosoportada mediante el uso de acelerómetros y strain gauges. La utilización de estos sensores en mediciones a escala real es una técnica muy utilizada para la caracterización dinámica de estructuras y la obtención de frecuencias de oscilación, razones de amortiguamiento y formas modales, las cuales pueden emplearse posteriormente en la calibración del modelo computacional. Se describen las principales técnicas que permiten caracterizar estructuras, entre ellas el análisis modal operacional (OMA), y se presentan las características dinámicas obtenidas a partir de la aplicación de esta técnica. Este material constituye un apoyo para estudiantes y profesionales que necesiten aplicar el OMA en la obtención de las características dinámicas de estructuras.

