










Serviços Personalizados
Journal
Artigo
 Português (pdf)
Português (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkRevista de Medicina Veterinaria
versão impressa ISSN 0122-9354
Rev. Med. Vet. no.24 Bogotá jul./dez. 2012
Variação e índice de simetria de variáveis cinéticas em cães normais no trote
Sergio Andrés Arias Serrato1 / Cleuza Maria de Faria Rezende2 / Hans Joachim Menzel3 / João Vicente Doretto4 / Plinio Ferreira Mantovani5 / Letícia Goulart de Oliveira6/ Jair Pérez Osório7 / Piedad Cristina Rivas López8 / Iván Darío Alvarez Ramírez9
1 Docente-Pesquisador da Faculdade de Ciências Agropecuárias, Universidad de La Salle, Colômbia. searias@unisalle.edu.co
2 Professor Titular, Departamento de Clínica e Cirurgia Veterinária da Universidade Federal de Minas Gerais, Brasil. cleuzaufmg@gmail.com
3 Professor Associado, Departamento de Educação Física e Terapia Ocupacional da Universidade Federal de Minas Gerais, Brasil. menzel@ufmg.br
4 Departamento de Clínica e Cirurgia Veterinária da Universidade Federal de Minas Gerais, Brasil. jvdoretto@icb.ufmg.br
5 Departamento de Clínica e Cirurgia Veterinária da Universidade Federal de Minas Gerais, Brasil. pliniomantovani@gmail.com
6 Departamento de Clínica e Cirurgia Veterinária da Universidade Federal de Minas Gerais, Brasil. leticiagoliveira@yahoo.com
7 Docente-Pesquisador Faculdade de Ciências Agropecuárias, Universidad de La Salle, Colômbia. jairperez@unisalle.edu.co
8 Docente-Pesquisador Facudade de Ciências Agropecuárias, Universidad de La Salle, Colômbia. pirivas@unisalle.edu.co
9 Docente-Pesquisador Facudade de Ciências Agropecuárias, Universidade de Antioquia, Colômbia. ivandarioalvarez@hotmail.com
Recebido: 8 de fevereiro de 2012. Aceito: 30 de agosto de 2012
Resumo
Os índices de simetria na marcha de caninos foram pouco relatados, existindo falta de consenso e desconhecimento do efeito da normalização nos resultados, sobretudo na ortogonal craniocaudal. A cinética da marcha no ciclo de trote de quinze cachorros mestiços foi analisada mediante plataforma de força amplificada procurando determinar a simetria na marcha determinando-se o índice de simetria (IS), sob dois sistemas de normalização dos dados em caninos normais, normalização pelo peso corporal e normalização pelas características morfométricas bidimensionais dos membros. Foram obtidos desta forma variáveis dinâmicas primárias de estudo como o IS no tempo e impulso até o pico de força e outras variáveis secundárias como resultado da amplificação da plataforma de força. Os valores para cada ensaio foram utilizados para calcular a média, desvio padrão e coeficiente de variação entre indivíduos e entre os animais. As variáveis na ortogonal craniocaudal foram mais irregulares e assimétricas que na ortogonal vertical e tiveram uma menor correlação com a normalização pela massa corporal. A normalização pelo peso corporal mostrou uma maior eficácia que a normalização pelas características morfométricas bidimensionais dos membros ratificando seu uso em estudos de cinética em caninos. Determinou-se que os índices de simetria não devem ser inferiores a 0,90 e 0,75 nas ortogonais vertical e craniocaudal respectivamente. Valores superiores aos descritos são valores aceitáveis para caninos normais e sem alterações ortopédicas.
Palavras chave: cinesiologia, cinética, índice de simetria, plataforma de força, cães.
Variaciones e índice simétrico de las variables cinéticas de caninos normales en el trote
Resumen
Los índices de simetría en la marcha de caninos han sido escasamente reportados. Falta consenso y se desconoce el efecto de la normalización en los resultados, sobre todo en la ortogonal craneocaudal. La cinética de la marcha en el ciclo de trote de quince perros mestizos se analizó mediante una plataforma de fuerza amplificada buscando determinar la simetría en la marcha. Se determinó el índice de simetría (IS) bajo dos sistemas de normalización de los datos en caninos entonces: normalización por el peso corporal y normalización por las características morfométricas bidimensionales de los miembros. Se obtuvieron variables dinámicas primarias de estudio como el IS en el tiempo e impulso hasta el pico de fuerza y otras variables secundarias como resultado de la amplificación de la plataforma de fuerza. Los valores para cada ensayo se utilizaron para calcular media, desviación estándar y coeficiente de variación entre individuos y entre los animales. Las variables en la ortogonal craneocaudal fueron más irregulares y asimétricas que en la ortogonal vertical y tuvieron una menor correlación con la normalización por la masa corporal. La normalización por el peso corporal mostró una mayor eficacia que la normalización por las características morfométricas bidimensionales de los miembros ratificándose su uso en estudios de cinética en caninos. Se determinó que los índices de simetría no deben ser inferiores a 0,90 y 0,75 en las ortogonales vertical y craneocaudal respectivamente. Valores superiores a los descritos son valores aceptables para caninos normales y sin alteraciones ortopédicas.
Palabras clave: kinesiología, cinética, índice de simetría, plataforma de fuerza, caninos.
Variations and Symmetric Index of Kinetic Variables of Normal Canines during Running
Abstract
Symmetry indexes in canine gait have been scarcely reported, and there is a lack of consensus and knowledge on the effect of normalization in the results, especially in the craniocaudal orthogonal. The kinetics of running was analyzed in the running cycle of fifteen mongrel dogs through an amplified force plate, in order to determine the symmetry of gait and symmetry index (SI) under two data standardization systems in normal dogs: normalization by body weight and normalization by the two-dimensional morphometric characteristics of the limbs. Thus, primary dynamic variables of study were obtained, such as the SI in time and momentum to peak force, as well as other secondary variables as a result of the force plate amplification. The values used for each test were used to calculate the mean, standard deviation and coefficient of variation between individuals and among the animals. Variables in the craniocaudal orthogonal were more irregular and asymmetrical than in the vertical orthogonal, and had a lower correlation with body mass normalization. Normalization by body weight showed greater efficacy than that given by the two-dimensional morphometric characteristics of the limbs, ratifying its use in kinetics studies in dogs. It was determined that symmetric indexes should not be inferior to 0.95 and 0.75 in vertical and craniocaudal orthogonal, respectively. Values higher than those described are acceptable for normal canines without orthopedic alterations.
Keywords: Kinesiology, kinetics, symmetric index, force platform, canines.
INTRODUÇÃO
Nas últimas duas décadas, importantes avanços nos procedimentos ortopédicos em pequenos animais têm se evidenciado. Porém, apenas nos últimos 15 anos a avaliação pós-cirúrgica mediante meios sistematizados de cálculo vem sendo empregados nestas espécies (1-8). A avaliação subjetiva da deambulação é a principal ferramenta utilizada pelo ortopedista veterinário (9). Porém, deficiências vêm sendo relatadas com respeito a essa prática quando compara-se com testes mais acurados (10).
A cinesiologia é a ciência que estuda a deambulação dos animais, estudando as características temporais e geométricas do movimento bem como as forças e impulsos verticais e craniocaudais decorrentes da locomoção mediante plataforma de força (11). Contudo, a disponibilidade e emprego destes meios de análise na clínica ortopédica diária eram limitados para o veterinário. Atualmente e devido ao avanço dos métodos de diagnóstico, estes recursos estão sendo utilizados com mais frequência, existindo desconhecimento das variáveis e aplicabilidade dos mesmos em casos clínicos individuais. Bertram et al. (12) relataram diferenças das variáveis cinéticas entre cães da raça labrador e greyhound, sendo que usualmente os estudos são realizados em cães de esporte ou em raças prédeterminadas. Portanto, os dados são obtidos com base em grupos experimentais da mesma raça, tornando difícil a padronização e emprego destes valores na casuística ortopédica diária que apresenta todo tipo e variedade de raças.
Outro problema de padronização e de grande debate está na normalização das forças e impulsos de frenagem e propulsão (craniocaudais), já que a normalização pelo peso corporal é mais aplicável para as forças verticais do que craniocaudais (12,13). Estudos visando determinar correlação entre essas variáveis cinéticas e morfologia, têm sido publicados (1,13,14). Porém, nem todos os estudos (12) estabeleceram novas metodologias de padronização. Lee et al. (13) descreveram que parte da variabilidade das forças craniocaudais pode estar na angulação com a qual o membro entra em contato com a superfície , estando isto relacionado com o ângulo, comprimento dos membros e aceleração no momento do contato. A variação e simetria das variáveis craniocaudais obtidas em cães sem raça definida são desconhecidas, sendo que o objetivo deste trabalho é oferecer dados de referência para cães normais sem raça específica e que apresentem variações abrangentes a todas as raças. Este estudo também visa a caracterização e a análise da variabilidade e simetria de novas variáveis cinéticas decorrentes de trote, empregando dois métodos diferentes de normalização.
MATERIAIS E MÉTODOS
Animais
Quinze animais sem raça definida (SRD) provenientes da prefeitura municipal de Belo Horizonte, com massa corporal entre 18,8 e 33,2 kg foram selecionados. Os animais foram mantidos em quarentena por quinze dias, na qual foram feitos exames de hemograma, fezes e sorológico para leishmaniose. Após a quarentena, os animais aptos e negativos nos testes foram vacinados, desverminados e submetidos a avaliação clínica por dois ortopedistas. Animais sem alterações ortopédicas evidentes foram encaminhados para execução de radiografias das articulações coxofemorais e fêmoro-tíbio-patelares, para descartar possíveis alterações não evidenciadas no exame ortopédico. Após um período de habituação e treinamento dos animais com o guiador, os animais foram passados através da plataforma de força em trote.
Filmagem
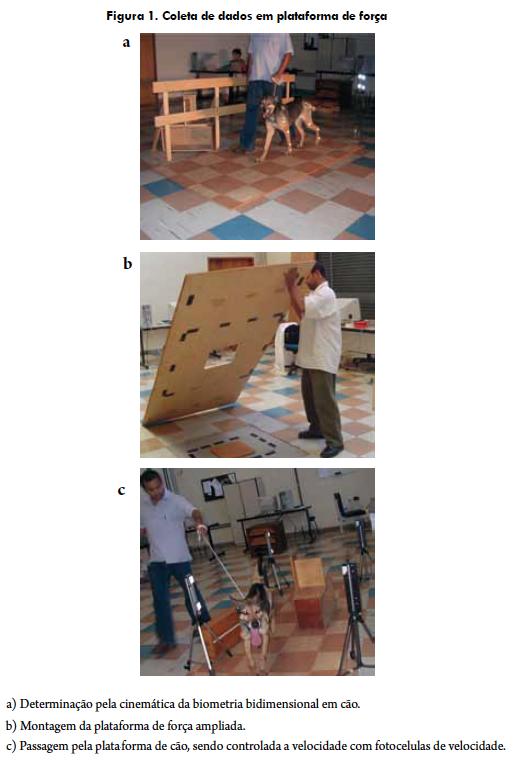
Antes da coleta dos dados, e visando determinar a morfometria bidimensional das passadas dos animais para normalização, os mesmos foram filmados (figura 1a), durante uma passada completa com quatro marcadores reflexivos colocados na pele, sobre o centro da porção proximal da escapula, na tuberosidade coxal, no maléolo metacarpiano distal (dígito anterior) e maléolo metatarsiano distal (dígito posterior) de ambos os lados corporais. A distância entre o ponto escapular e coxal foi determinada, assim como as distâncias entre a escápula-dígito anterior e a tuberosidade coxal-dígito posterior. Estas distâncias foram determinadas nas fases de extensão do membro correspondente. Os valores utilizados para normalização de variáveis do membro anterior foram obtidos somando a distância escápulo-coxal com a escápulo-dígito anterior e somando a distância coxal-dígito posterior para variáveis do membro posterior.
Plataforma de força
Foi utilizada uma plataforma de força (AMTI) com frequência de aquisição de 1000 Hz para 2 s, com dimensões de 40 cm de largura e 60 cm de comprimento, cuja superfície sensível foi ajustada mediante plataforma de madeira para área sensível de 30 x 30 cm. Uma plataforma de madeira de 2 x 1 m de largura com um orifício central quadrado de 30 x 30 cm foi posicionada acima da plataforma de força. Em volta da área sensível da plataforma utilizaram-se elevadores de borracha de 5 mm de espessura, para evitar o contato entre a plataforma de madeira e a plataforma de força. Finalmente, uma peça de madeira foi encaixada (30 x 30 cm) de forma justa no orifício da plataforma de madeira contatando com a área sensível da plataforma de força, constituindo assim a área sensível utilizada (figuras 1b e 1c). Visando maior precisão na análise das variáveis craniocaudais, foi utilizado um fator de amplificação de 2 vezes na plataforma de força. Foi determinada a velocidade de cada tentativa mediante o emprego de duas fotocélulas de velocidade, posicionadas a 2 m de distância entre elas e coincidindo com os extremos da plataforma de madeira.
Antes de cada aquisição de dados, os animais caminharam por um trecho de 400 m visando regularização das passadas. Posteriormente os animais foram passados através da plataforma de força em ciclo de trote e em linha reta, este estudo utilizou um único guiador para todos os animais.
Foi considerada como tentativa válida, aquela em que houve apoio dos dois membros ipsilaterais no centro da área sensível da plataforma de madeira, e nas que foram acusadas velocidades entre 1,3 e 1,64 m/s, de um total de 10 tentativas válidas foram escolhidas 5 tentativas por lado corporal (direito ou esquerdo) para análise. Em cada variável analisada, foram obtidos: média, desvio padrão (dp) e coeficiente de variação (cv), a partir dos dados provenientes de 5 tentativas por lado corporal do mesmo animal. Este coeficiente de variação individual foi chamado de coeficiente de variação "intra-individual". Além disso, foram utilizados para cada variável de estudo, valores de quinze médias provenientes de 5 tentativas válidas por lado corporal. Obteve-se o desvio padrão e o coeficiente de variação entre animais " interindividual". Forças partindo dos eixos ortogonais vertical (z) e craniocaudal (y) e os impulsos respectivos (Iz e Iy) foram transmitidas desde a plataforma de força para o computador coletor e processador da informação. Os sinais das forças e impulsos foram analisados com o programa Dasylab e filtrados com filtro butterworth lowpass de 10 Hz.
Variáveis de análise
As forças e impulsos craniocaudais foram divididos em forças de frenagem (Fy-Fr, Iy-Fr) e propulsão (Fy-Pr, Iy-Pr) (figura 2). Após o a determinação dos valores das forças e impulsos, foram normalizados pelo peso corporal (pc) de cada animal e pela distância bidimensional (db), sendo calculados os índices de simetria segundo Budsberg et al. (15). Os valores de cada tentativa foram utilizados para calcular a média, o desvio padrão, e os coeficientes de variação entre indivíduo e entre animais.
As variáveis resultantes de análise de cada tentativa foram classificadas em dois grupos: variáveis primárias, cuja origem foi absolutamente dos dados coletados no programa e procedentes da plataforma de força, e variáveis secundárias que foram derivadas das variáveis primárias e utilizadas para caracterização dos resultados. Devido à sobreposição de impulsos dos membros ipsi-laterais, anterior e posterior na ortogonal z, o ponto de inflexão (figura 3) foi determinado em cada tentativa, empregando-se como base para as mensurações do membro posterior. Foram determinadas variáveis primárias em cada membro como: máxima força vertical (Fz Max), máximas forças craniocaudais (Fy-Fr, Fy-Pr) impulso vertical (Iz), impulso craniocaudal (Iy-Fr, Iy-Pr), tempo de contato (Tc), duração do tempo de frenagem (dt-fr), duração do tempo de propulsão (dt-Pr), duração do tempo até pico de força (dt-Pico, dt-Pico-Fr, Ty-Pico-Pr), impulso ate pico de força, (Iz-Pico, Iy-Pico-Fr, Iy-Pico-Pr) (figura 4).
As variáveis secundárias foram usualmente porcentagens: porcentagem de pico vertical de força (% Força Z Post/Ant) obteve-se dividindo o valor máximo de força vertical do membro posterior no anterior e multiplicando o valor resultante por 100. Para a porcentagem de pico craniocaudal de força (% Força e propulsão/frenagem) e impulso vertical (% Z Post/Ant) utilizou-se o mesmo procedimento. A porcentagem de frenagem (%Fr), propulsão (%Pr) foi obtida a partir do tempo de contato na ortogonal e a porcentagem de contato do membro anterior (% anterior) e posterior (% posterior) a partir da ortogonal z, o excedente de propulsão foi obtido a partir da subtração do impulso de frenagem e de propulsão. Visando analisar a simetria das variáveis foi calculada a variável secundária, índice de simetria (IS), nas variáveis obtidas segundo método descrito na literatura (15).
RESULTADOS
Os dados resultantes do apoio de membros ipsilaterais foram representados em forma de curvas "força-tempo", duas curvas representando o apoio do membro anterior e posterior do mesmo lado corporal foram evidenciadas (figuras 4 e 5). Os resultados após mensuração das curvas e obtenção dos valores das variáveis de 15 cães SRD, no ciclo de trote, são mostrados na tabela 1. Sendo consideradas as variáveis sem normalização, foi evidenciado que as forças máximas e impulsos verticais do lado direito foram de 226,69 N/kg/s ± 40,97; 48,34 N/kg/s ± 13,63 nos membros anteriores e de 136,71 N/kg ± 26,86; 28,02 N/kg/s ± 7,01 nos posteriores. Os valores do lado esquerdo (224,11 N/kg ± 39,43; 49,48 N/kg/s ± 15,66 membro anterior e 133,91 N/kg ± 21,61; 28,07 N/kg/s ± 6,72 membro posterior) não diferiram com os do lado direito, fato que foi constatado quando da mensuração dos índices de simetria (tabela 1). A soma do impulso total ou área sob as duas curvas foi de 70,88 ± 14,13 no lado direito e 71,37 ± 14,6 no esquerdo, apresentando coeficiente de variação de aproximadamente 20 %.
Após a normalização dos dados, pelo peso corporal, notou-se que os picos de força de frenagem anteriores e posteriores corresponderam aproximadamente a 5,5 e 2 %, respectivamente, do peso corporal. Fazendo relação numérica, entre os impulsos e picos de força, em termos de porcentagem de peso corporal, nota-se que os valores dos impulsos foram aproximadamente 10 % do valor de pico de força correspondente (Fy Max ant = 5,5 % do pc, Iy Max ant = 0,6). Esta relação foi aplicável em todos os picos de força avaliados.
Os impulsos gerados até o pico de força foram pequenos, localizando-se na faixa de 0,3 % do peso corporal, exceto para o impulso até o pico de força de frenagem do membro posterior que foi de 0,1 %. Como é mostrado na tabela 1, as forças e os impulsos normalizados ao peso corporal mostraram alta simetria quando comparadas com as forças sem normalização. Os valores de normalização à distância corporal não foram aplicáveis para raciocínio, constituindo apenas valores de referência para comparação.
Na tabela 2 são mostrados os coeficientes de variação normalizados (peso corporal e distância) e não normalizados decorrentes dos dados da tabela 1.
Os coeficientes de variação intra-individuais foram menores quando comparados com os coeficientes interindividuais. Foi evidente que as forças e impulsos craniocaudais apresentaram maior variabilidade do que as verticais. A variabilidade e assimetria dos impulsos e forças relacionadas com o pico força foram altas, sendo que os maiores coeficientes de variação foram evidenciados nas forças e impulsos de frenagem e propulsão do membro posterior (Fy-Fr-Post, Iy-Pico-Fr-Post, Iy-Pr-Post, Iy-pico-Pr-Post). Outras variáveis que apresentam coeficientes de variação altos foram o impulso de frenagem (Iy-Fr-Ant), propulsão (Iy-Pr-Ant) e o impulso até pico de força de frenagem (Iy-Pico-Max-Ant) e propulsão (Iy-Pico-Pr-Ant) do membro anterior. O cv do tempo de contato até o pico de força de propulsão do membro posterior direito mostrou-se relativamente alto quando comparado com o do lado esquerdo, fato que foi controlado quando os valores foram normalizados ao peso corporal. Após a normalização pelo peso corporal, os valores de cv das variáveis remanescentes estiveram perto do limite máximo de cv apropriado (~30 %) para variáveis de experimentação animal. A normalização pelo peso corporal mostrou ser mais eficiente em controlar a variação entre animais, do que a normalização à distância corporal. Os valores de normalização pela distância corporal foram semelhantes aos valores sem normalização.
Os valores de variáveis secundárias, além do IS são mostrados na tabela 3. O impulso e valor do pico de força vertical do membro posterior foram aproximadamente 60 % da grandeza do impulso e pico de força do membro anterior. O pico de força de propulsão foi aproximadamente 95 % do pico de força de frenagem. Estas duas variáveis apresentaram simetria aceitável como evidenciado na tabela de IS (tabela 4). Dentre as variáveis relativas à força e impulso, o valor de porcentagem de propulsão e frenagem do membro posterior apresentou coeficiente de variação mais alto. Os valores do excedente de propulsão também apresentaram valores de variabilidade altos, o que os fez pouco confiáveis. Nas variáveis secundárias derivadas do tempo, foi observado que a porcentagem de frenagem do membro anterior (53,30 ± 3,55) foi maior do que a do membro posterior (32,20 ± 7,39) e a porcentagem de propulsão do membro posterior (67,80 ± 7,39) maior que a do membro anterior (46,70 ± 3,55). O tempo de contato do membro anterior foi igual ao tempo contato do membro posterior. Estas variáveis apresentaram coeficiente de variação baixo e alta simetria.
Nas variáveis primárias evidenciou-se que todos os valores do IS (tabela 4) obtidos na ortogonal vertical (z) estiveram acima de 0,90, sendo a média de todos os valores 0,93 ± 0,0331 com coeficiente de variação de 3,57 %. As variáveis do membro anterior foram de forma geral mais simétricas quando comparadas com as do membro posterior, sendo evidenciado pelos valores do IS maiores nestas variáveis. As variáveis da ortogonal craniocaudal foram menos simétricas e mais variáveis (média membro anterior IS = 0,87 ± 0,059, cv = 6,79; média membro posterior IS= 0,80 ± 0,097; cv = 12,10) quando comparadas com as da ortogonal vertical. A variável mais assimétrica foi a do impulso de propulsão até o pico de força do membro posterior; enquanto as variáveis mais simétricas, foram as relacionadas com tempo de contato. Neste estudo o valor do IS dos picos de força e impulsos de frenagem e propulsão no membro anterior, foram iguais ou maiores do que 0,80, e iguais ou maiores do que 0,75 no membro posterior, mostrando menos simetria no membro posterior (tabela 4).
DISCUSSÃO
Os valores encontrados para forças, impulsos e tempos nas ortogonais vertical e craniocaudal concordam com os estudos descritos na literatura para cães no ciclo de trote (2,12,14,16-22). O efeito da normalização pelo peso corporal constituiu uma ferramenta adequada para a análise de variáveis em protocolos experimentais e para análise individual. A diferença apresentada no coeficiente de variação entre variáveis sem normalização e normalizadas isolou o efeito da massa corporal sobre o valor numérico das forças e impulsos mensurados. A normalização pelo peso corporal foi mais eficiente em tirar esse efeito do que a normalização pelas características bidimensionais geométricas dos animais. O efeito destas características teve uma contribuição menor na variação entre os animais provavelmente pela homogeneidade das características de distância entre os animais, sendo possível que este tipo de normalização seja mais adequada em testes nos quais as diferenças geométricas de marcha dos animais é maior como evidenciado por Bertram et al. (12). Novos estudos utilizando valores angulares e de perimetria dos membros poderiam ser realizados visando uma normalização mais adequada das forças e impulsos de frenagem e propulsão.
Os coeficientes de variação intra e inter-individuais foram particularmente altos neste estudo, quando comparados com estudos já relatados (18,23). Entretanto, o cv da ortogonal craniocaudal concordou com os valores encontrados na literatura para estas variáveis (21). Usualmente o valor do coeficiente de variação inter-individual é aproximadamente o dobro do intra-individual (16,18,23), significando que 50 % da variação total do coeficiente nessa ortogonal é relativa a diferença entre animais. Neste trabalho, isso apenas foi evidenciado nas variáveis da ortogonal vertical. A diferença das passadas entre os animais pode ter resultado nesse aumento. A variação das variáveis da ortogonal cranio-caudal mostrou mudança diferente das verticais quando da normalização, sendo estas menos influenciadas pela variação entre animais, e mais influenciadas pela variação individual o que foi demonstrado pela similaridade entre os coeficientes de variação inter-individual normalizado e intra-individual. Esta similaridade corrobora os achados relatados por Lee et al. (24) que demonstraram que as forças e impulsos craniocaudais são menos influenciadas pela massa corporal. Dentre as variáveis analisadas, os impulsos do membro anterior e posterior apresentaram os maiores coeficientes de variação. Tal variabilidade foi provavelmente associada ao peso corporal, já que o efeito da normalização diminuiu os valores do cv para valores razoáveis (25).
Vários fatores têm sido relatados influenciando a variabilidade das tentativas quando da coleta de dados em plataforma de força. A variabilidade devido as passadas dos cachorros, repetições, guiadores, foram relatadas, acreditando-se que a maior variabilidade encontra-se nas passadas dos cachorros e repetições (21). A diferença na forma de locomoção entre as raças (12) e a falta de habituação com a sala de coleta também têm sido propostas como fatores de variação dos valores em cães (23). Contudo, este estudo utilizou cães sem raça definida, o que contribuiu para o aumento na variabilidade. Porém, para os efeitos práticos de utilização de plataforma de força em casos clínicos individuais, estes dados poderiam refletir o cenário real de variação de um paciente de qualquer raça que não foi habituado à sala de coleta. Poderíamos afirmar que é esperado que animais de porte médio e com peso como os descritos neste trabalho se situem nos valores sem normalização apresentados aqui.
Os coeficientes de variação intra-individuais representam a variabilidade entre as passadas de um mesmo individuo. Os cv mais altos foram relacionados com as forças de frenagem do membro posterior. Vários fatores puderam ter contribuído para esta variação, a sobreposição das forças de propulsão do membro posterior e anterior foi a causa mais importante da variação neste estudo, sendo esta mais acentuada nas variáveis secundárias. Bertram et al. (12) relataram que as fotocélulas de velocidade não são um instrumento preciso para fazer o controle da velocidade e aceleração, sendo que outros autores sugerem o tempo de contato como parâmetro de análise e regularização das passadas (19,22). Os cães podem alternar a velocidade e aceleração das pisadas dentro de uma passada (13,24), levando a redistribuição das forças em cada passada dando como resultado um aumento da variação. Embora, com o emprego neste estudo de fotocélulas de velocidade, o efeito de variação da aceleração e velocidade durante o trecho de contato influenciou os valores obtidos nessas variáveis (12,17,19,21). Bockstahler et al. (26) descrevem que a variação intra-individual está relacionada principalmente, em ordem decrescente de importância com a variação do cachorro, variação do lado corporal coletado, variação do dia e variação devido às repetições.
O movimento é composto pela compensação e equilíbrio de forças (13). Uma análise completa da locomoção requer que os movimentos sejam determinados em todas as fases do ciclo de locomoção avaliado. A plataforma de força apenas oferece dados provenientes da fase de apoio das pisadas de diferente passada (12), sem conhecer a dinâmica da fase de elevação de cada membro, isto faz com que dos dados provenientes da plataforma de força sejam parciais de um ciclo de locomoção, e apresentem grande variação. Contudo, estudos objetivando a análise mais completa dos ciclos de trote em cães, empregando várias plataformas de força (12,27) e esteiras (26) têm sido feitos. Porém, a variabilidade destes estudos permanece similar à relatada com o emprego de apenas uma plataforma.
Os valores das variáveis secundárias foram similares aos descritos na literatura. Porém, poucos autores (6,8,15,20) relataram o emprego de variáveis secundárias e índices de simetria como instrumento de avaliação. Os valores do IS das forças craniocaudais foi menor quando foram comparadas com as verticais. Esta assimetria poderia ser explicada pelo diferente comportamento dos cães entre as passadas como anteriormente discutido. No entanto, mesmo com a variação apresentada dos índices, foi demonstrado que em cães normais estes valores não poderiam ser menores do que 0,75-0,80 para variáveis da ortogonal craniocaudal e de 0,90 para a ortogonal vertical. Após a normalização (pelo peso corporal ou pela distância corporal), os índices mostraram alta simetria sugerindo melhora na precisão desta variável quando da análise de grupos. Os valores de índices de simetria encontrados neste estudo coincidem com os relatados por Budsberg et al. (15). Em nosso conceito, os índices de simetria constituem ferramenta fundamental para avaliação cinética de indivíduos e de respostas de grupos.
CONCLUSÕES
A maioria dos trabalhos com cães utiliza variáveis primárias para análise de tratamentos de certas patologias (1-8). Contudo, alguns desses procedimentos (exemplo a prótese total coxofemoral na displasia coxofemoral canina) podem não alterar as variáveis do eixo ortogonal vertical, alterando variáveis do eixo craniocaudal (28-30). É preciso focalizar as pesquisas na procura de alterações das novas variáveis primárias (tempo até pico de força, impulso até pico de força) e secundárias descritas neste trabalho, já que estas poderiam variar dependendo da patologia em avaliação. A amplificação dos sinais recebidos pela plataforma de força mostrou-se eficiente na coleta e análise de sinais pequenos quanto aos referentes ao impulso até picos de força do eixo craniocaudal.
REFERÊNCIAS
1. Budsberg SC, Verstraete MC, Soutas-Little RW et al. Force Plate analysis before and after stabilization of canine stifles for cruciate injury. Am J Vet Res. 1988;49(9):1522-4. [ Links ]
2. Jevens DJ, DeCamp CE, Hauptman JG et al. Use of force plate analysis of gait to compare two surgical techniques for treatment of cranial cruciate ligament rupture in dogs. Am J Vet Res. 1996;57(3):389-93. [ Links ]
3. Dupuis J, Harari J, Papageorges M et al. Evaluation of fibular head transposition for repair of experimental cranial cruciate ligament injury in dogs. Veterinary Surgery. 1994;23:1-12. [ Links ]
4. Tano CA, Cockshutt JR, Dobson H et al. Force plate analysis of dogs with bilateral hip dysplasia treated with a unilateral triple pelvic osteotomy: a long-term review of cases. Veterinary and Comparative Orthopaedics and Traumatology. 1998;11:85-93. [ Links ]
5. O'Connor BL, Visco DM, Rogers PI et al. Serial force plate analyses of dogs with unilateral knee instability, with or without interruption of the sensory input from the ipsilateral limb. Osteoartrithis and Cartilage. 1999;7:567-73. [ Links ]
6. Kirpensteijn J, Van Den Bos R, Van Den Brom WE. Ground reaction force analysis of large breed dogs when walking after the amputation of a limb. The Veterinary Record. 2000;146:155-9. [ Links ]
7. Renberg WC, Johnston SA, Ye K et al. Comparison of stance time and velocity as control variables in force plate analysis of dogs. Am J Vet Res. 1999;60(7):814-9. [ Links ]
8. Theyse LF, Hazewinkel HA, Van Den Brom WE. Force plate analysis before and after surgical treatment of unilateral fragmented coronoid process. Veterinary and Comparative Orthopaedics and Traumatology. 2000;13:135-40. [ Links ]
9. DeCamp CE. Kinetic and kinematic gait analysis and the assessment of lameness in the dog. The Veterinary Clinics of North America Small Animal Practice. 1997;27(4):825-40. [ Links ]
10. Hottinger HA, DeCamp CE, Olivier B et al. Noninvasive kinematic analysis of the walk in healthy large-breed dogs. Am J Vet Res. 1996;57(3):381-8. [ Links ]
11. Anderson MA, Mann FA. Force plate analysis: a noninvasive tool for gait evaluation. Compendium of Continuing Education. 1994;16(7):857-67. [ Links ]
12. Bertram JE, Lee DV, Case HN. Comparison of the trotting gaits of Labrador retrievers and greyhounds. Am J Vet Res. 2000;61(7):832-8. [ Links ]
13. Lee DV Stakebake EF, Walter RM et al. Effects of mass distribution on the mechanics of level trotting in dogs. Journal of Experimental Biology. 1999;202:3565-73. [ Links ]
14. Nielsen C, Stover SM, Schulz KS et al. Two dimensional link segment model of the forelimb of dogs at the walk. Am J Vet Res. 2003;64(5):609-17. [ Links ]
15. Budsberg SC, Jevens DJ, Brown J et al. Evaluation of limb symmetry indices, using ground reaction forces in healthy dogs. Am J Vet Res. 1993;54(10):1569-74. [ Links ]
16. Rumph F, Lander JE, Kincaid SA et al. Ground reaction force profiles from force plataform gait analysis of clinically normal mesomorphic dogs at the trot. Am J Vet Res. 1994;55(6):756-61. [ Links ]
17. Riggs CM, Decamp CE, Soutas-Little TD et al. Effects of subject velocity on force plate-measured ground reaction forces in healthy Greyhounds at the trot. Am J Vet Res. 1993;54(9):1523-26. [ Links ]
18. Budsberg SC, Verstraete MC, Brown J et al. Vertical loading rates in clinically normal dogs at a trot. Am J Vet Res. 1995;56(10):1275-80. [ Links ]
19. McLaughlin RM, Roush JK. Effects of increasing velocity on braking and propulsion times during force plate gait analysis in Greyhounds. Am J Vet Res. 1995;56(2):159-61. [ Links ]
20. Rumph F, Kincaid SA, Visco DM et al. Redistribution of vertical ground reaction force in dogs with experimentally induced chronic hind limb lameness. Veterinary Surgery. 1995;24:384-89. [ Links ]
21. Jevens DJ, Hauptman JG, DeCamp CE et al. Contributions to variance in force plate analysis of gait in dogs, Am J Vet Res. 1993;54(4):612- 5. [ Links ]
22. Renberg WC, Johnston SA, Ye K, Budsberg SC. Comparison of stance time and velocity as control variables in force plate analysis of dogs. Am J Vet Res. 1999;60(7):814-9. [ Links ]
23. Rumph F, Steiss JE, Montgomery RD. Effects of selection and habituation on vertical ground reaction force in greyhounds. Am J Vet Res. 1997;58(11):1206-8. [ Links ]
24. Lee DV, Bertram JE, Todhunter RJ. Acceleration and balance in trotting dogs. Journal of Experimental Biology. 2004;207:1715-28. [ Links ]
25. Sampaio IB Estatística aplicada à experimentação animal. 2a ed. Belo Horizonte: Editora Faculdade de Medicina Veterinária e Zootecnia-UFMG, 2002. [ Links ]
26. Bockstahler BA, Skalicky M, Peham C et al. Reliability of ground reaction forces measured on a treadmill system in healthy dogs. The Veterinary Journal. 2005;in press. [ Links ]
27. Bertram JE, Lee DV, Todhunter RJ. Multiple force plataform analysis of the canine trot: a new approach to assessing basic characteristics of locomotion. Veterinary and Comparative Orthopaedics and Traumatology. 1997;10:160-9. [ Links ]
28. Manley A, Vanderby R, Dogan S. Ground reaction force comparison of canine cemented and cement-less total hip replacement. Clinical Biomechanics. 1990;5(2):199-204. [ Links ]
29. Dogan S, Manley R, Vanderby R. Canine intersegmental hip joint forces and moments before and after cemented total hip replacement. Clinical Biomechanics. 1991;24(6):397-407. [ Links ]
30. Budsberg SC, Chambers JN, Van Lue S et al. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am J Vet Res. 1996;57(12):1781-5. [ Links ]
