










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO -
 Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkIngeniería y Universidad
versión impresa ISSN 0123-2126
Ing. Univ. v.13 n.1 Bogotá ene./jun. 2009
Modelamiento de un rectificador en configuración de medio puente con factor de potencia unitario*
Modelling of a Rectifier with Unity Power Factor in Half Bridge Configuration**
Modelagem de um retificador em configuração de ponte média com fator de potência unitário***
Arturo Fajardo-Jaimes****
Fernando Ojeda-Ruiz*****
Abdel Karim Hay-Harb******
Gabriel Perilla-Galindo*******
**** Ingeniero electrónico. Magíster en Ingeniería Electrónica, Pontificia Universidad Javeriana, Bogotá, Colombia. Profesor instructor, Pontificia Universidad Javeriana. Correo electrónico: fajardoa@javeriana.edu.co.
***** Ingeniero electrónico, Universidad Distrital Francisco José de Caldas, Bogotá, Colombia. Magíster en Ingeniería Electrónica, Pontificia Universidad Javeriana, Bogotá, Colombia. Ingeniero de Investigación y Desarrollo, UyG Ingeniería S. A. Correo electrónico: fojeda@javeriana.edu.co.
****** Ingeniero electrónico. Magíster en Ingeniería Electrónica, Pontificia Universidad Javeriana, Bogotá, Colombia. Profesor asociado, Pontificia Universidad Javeriana. Correo electrónico: karim.hay@javeriana.edu.co.
******* Ingeniero electrónico. Magíster en Ingeniería Electrónica, Pontificia Universidad Javeriana, Bogotá, Colombia. Profesor asistente, Pontificia Universidad Javeriana. Correo electrónico: gabriel.perilla@javeriana.edu.co.
* Fecha de recepción: 19 de septiembre de 2008. Fecha de aceptación para publicación: 3 de febrero de 2009. Este artículo está basado en el proyecto de investigación denominado Implementation de un controlador digital para un motor de inducción trifásico, financiado por la Facultad de Ingeniería de la Pontificia Universidad Javeriana.
** Submitted on September 19, 2008. Accepted on February 3, 2009. This article is based on a research project called Implementing a Digital Controller for a Triphase Induction Motor, financed by the School of Engineering at the Pontificia Universidad Javeriana, Bogotá, Colombia.
*** Data de recepção: 19 de setembro de 2008. Data de aceitação para publicação: 3 de fevereiro de 2009. Este artigo baseia-se no projeto de pesquisa denominado Implementação de um controlador digital para um motor de indução trifásico, financiado pela Faculdade de Engenharia da Pontificia Universidad Javeriana.
Resumen
En este artículo se presenta un modelo lineal de un rectificador monofásico con factor de potencia unitario (CPF) en configuración medio puente. El modelo propuesto se obtiene a través de la técnica de promedio móvil y análisis cuasi estático. Esta metodología se aplica al CPF a fin de encontrar las funciones de transferencia que rigen su comportamiento dinámico, para una estructura de control en cascada, formada por dos mallas de control anidadas, de las cuales la malla interna se caracteriza por tener un mayor ancho de banda. Por último, se muestran algunos resultados de la implemen-tación del rectificador controlado digitalmente por un procesador digital de señales (DSP).
Palabras clave: Rectificadores de corriente eléctrica, electrónica de potencia, circuitos electrónicos.
Abstract
This paper presents a modelling of a rectifier with unity power factor (PFC) in half bridge configuration. The proposed approach is based on the movable average technique and quasi-static process analysis. This methodology is applied to find the transfer functions that describe the dynamics of the PFC, under a cascade control structure of internal and external loops. This control requires a larger bandwidth for the internal loop. Finally, some experimental results with a digital control implemented in a digital signal processor (DSP) are presented.
Key words: Electric current rectifiers, power electronics, electronic circuits.
Resumo
Neste artigo apresenta-se um modelo linear de um retificador monofásico com fator de potencia unitário (CPF) em configuração de ponte média. O modelo proposto obtém-se através da técnica de média móvel e analise quase estático. Aplica-se esta metodologia ao CPF com o objetivo de encontrar as funções de transferência que regem o seu comportamento dinâmico, para una estrutura de controle em cascata, formada por duas malhas de controle alojadas, das quais a malha interna caracteriza-se por ter uma largura de banda. Por último, mostram-se alguns resultados da implementação do retificador controlado digitalmente por um processador digital de sinais (DSP).
Palavras chave: Retificadores de corrente elétrica, eletrônica de potência, circuitos eletrônicos.
Introducción
El factor de potencia (FP) es un indicador que representa la eficiencia del proceso de utilización de la potencia eléctrica, incluso para cargas no lineales. Una de las etapas de conversión de energía más usadas por las cargas conectadas a la línea de distribución son los conversores de corriente alterna a corriente directa (CA/CD), generalmente llamados rectificadores. La etapa de potencia imple-mentada por los rectificadores puede hacerse de muy diversas formas, pero algunas de ellas son más apropiadas para unas aplicaciones que para otras. Esto depende de su eficiencia, generación de ruido de alta frecuencia, potencia manejada, tipo de alimentación, etc.
Cuando el conversor CA/CD se caracteriza por tener un FP cercano a la unidad, se denomina corrector delfactor depotencia (CFP). En (Redl y Kislovski, 1995; Singh et al., 2003) puede consultarse un buen compendio de configuraciones de CFP. Es importante resaltar que el efecto de una única carga de baja potencia, con un FP bajo, conectada a red de distribución, puede ser despreciable; mientras que el efecto acumulativo de la conexión de varias cargas con las características enunciadas, en la mayoría de los casos, afecta significativamente el comportamiento de la red de distribución (Redl y Kislovski, 1995). En la revisión hecha sobre la temática involucrada en el diseño e implementación del CFP, se encontraron diversos análisis de esquemas de control basados en diferentes técnicas de modelamiento (Zheren y Smedly, 1998; Erickson y Maksimovic, 2001).
Como parte del desarrollo de los proyectos Rectificador de voltaje controlado por DSP, con corrección de factor de potencia y bajo contenido armónico (Hay et al., 2005) e Implementación de un controlador digital para un motor de inducción trifásico (Fajardo y Ojeda, 2008), del grupo de investigación en Sistemas de Control, Electrónica de Potencia y Gestión de Innovación Tecnológica (CEPIT), de la Pontificia Universidad Javeriana, se modeló un rectificador con factor de potencia unitario en configuración de medio puente a partir de la técnica de promediación y análisis cuasi estático (Erickson y Maksimovic, 2001), que permite orientar el diseño del control a una compensación convencional tipo proporcional integral y derivativo (PID).
El esquema de control propuesto se diseñó e implementó satisfactoriamente, dado que se cumplieron las especificaciones propuestas y se validaron tanto analíticamente como experimentalmente los conceptos utilizados en el desarrollo de los proyectos (Hay et al., 2005; Fajardo y Ojeda, 2008). El modelamiento del rectificador utilizado en dichos proyectos es el tema de este artículo.
1. Modelamiento de la topología
1.1 Análisis de la topología
Para conseguir que el circuito CFP mostrado en la Figura 1, transforme energía eléctrica CA en CD y produzca un FP unitario en la entrada CA y un voltaje regulado a la salida CD, es necesario controlar el ciclo de trabajo (h) de los interruptores, donde las variables que son objeto de control son la corriente de alimentación (i) y los voltajes de salida vx y v .
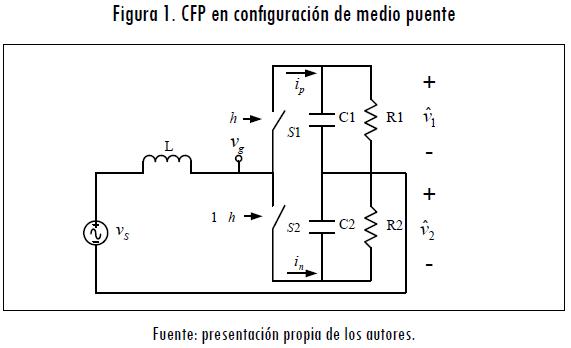
Enmarcados en el problema de control expuesto, se identificaron dos mallas de control: la primera, encargada de controlar la corriente i, la cual debe disponer de un ancho de banda suficiente para que i pueda repetir la forma de onda de vs. La segunda, encargada de regular las tensiones de salida v1 y v2. Para el diseño de la estructura de control en cascada se encontró un modelo lineal del sistema que permitiera calcular las funciones de transferencia asociadas a cada malla de control.
1.2 Modelo lineal de señal pequeña (SP)
Una forma de encontrar el modelo lineal del CFP es utilizar la técnica de promedio móvil y el análisis en estado cuasi estático para hallar los circuitos de señal pequeña (SP) (Hiti y Borojevic, 1995; Erickson y Maksimovic, 2001; Hay et al., 2005; Fajardo y Ojeda, 2008), y así determinar los modelos de SP para el circuito estudiado en este artículo. Por conveniencia, parte del desarrollo se reescribe para presentar el modelamiento del rectificador, interés principal de este documento. Enmarcados en el problema de desempeño de un CFP, las dinámicas relevantes para el diseño de los controladores se encuentran por debajo de la frecuencia de conmutación (f), que por lo general es muy grande en comparación con la frecuencia fundamental del voltaje de alimentación (vs).
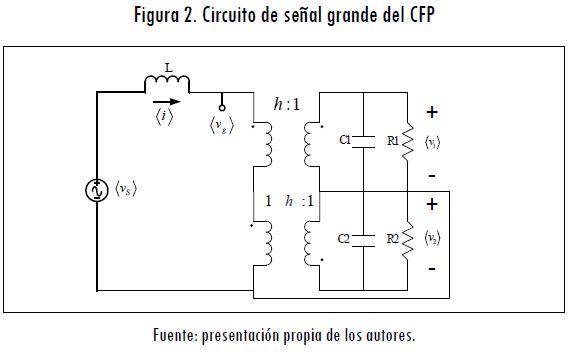
Para el modelamiento se parte de las ecuaciones dinámicas que rigen su comportamiento (1) y se utiliza la técnica de promediación de las señales durante un período de conmutación (2), con lo que se obtiene un modelo continuo descrito por (3). Donde h es el valor promedio de la función de conmutación S, (S =1, S =0) y (1h) es el valor promedio de la función de conmutación S. La descripción circuital de (3), llamada circuito de señal grande (SG), se observa en la Figura 2. Este modelo representa adecuadamente el comportamiento dinámico del circuito original en las frecuencias de interés (f<f/2) (Erickson y Maksimovic, 2001).





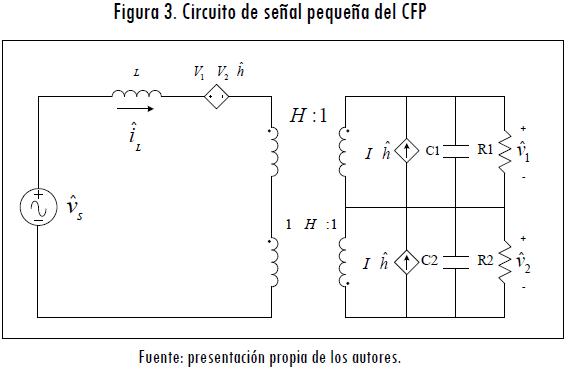
Aunque en el circuito de SG se han eliminado las discontinuidades introducidas por la conmutación, el circuito continúa siendo no lineal. Para hacerlo lineal se usa el método de excitación de variables (Erickson y Maksimovic, 2001), como se observa en (4). El resultado de dicho procedimiento se resume en (5), y su descripción circuital, llamada circuito de SP se observa en la Figura 3.






1.2.1 Malla de corriente
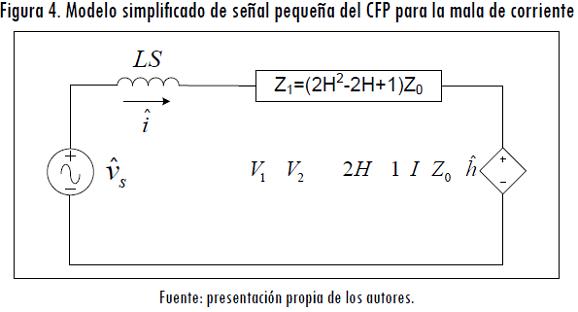
Al simplificar el circuito de SP para la malla de corriente (Hay et al, 2005), se encuentra el circuito equivalente de la Figura 4, donde se ha considerado que C = C2 = C y que R1 = R2 = R, puesto que una carga desbalanceada implicaría la inyección de corriente DC a la entrada, que impide obtener un factor de potencia unitario con esta topología. Del circuito de SP equivalente se encuentra la función de transferencia de la variable de control h a la corriente i (6b) y la función de transferencia del disturbio v a la corriente i (6c).

Donde:



Asumiendo una modulación por ancho de pulso (MAP) con una amplitud de la portadora V, controlada por un voltaje de control (v), se puede obtener la función de transferencia desde v . hasta la corriente i (7) (Erickson y Maksimovic, 2001).

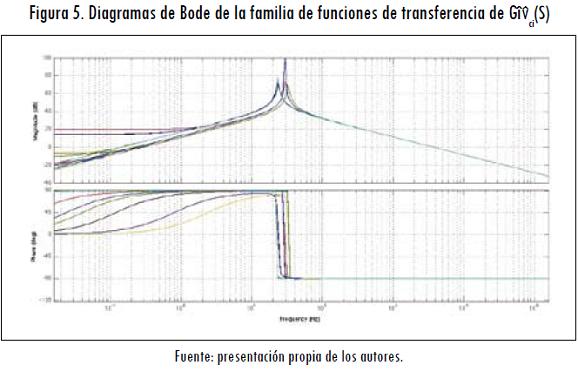
A partir del principio de equilibrio en potencia en estado estacionario del circuito de SG y considerando una línea de alimentación sinusoidal sin distorsión (7b), se pueden escribir los parámetros I y H en función de los parámetros estructurados del circuito (R, L, C, Vp V1 V2) y la variable θ=ωt, para representar la variación en el tiempo del punto de operación alrededor del cual se hace lineal el rectificador, considerando una línea de alimentación sin pérdidas (7b). De este proceso se obtiene (7c) y (7d).



En la Figura 5 se ilustra la familia de funciones de transferencia de la planta que se obtiene para los valores usados en el CPF implementado en (Fajardo y Ojeda, 2008), donde la carga (R) varía de 5Ω a 20kΩ; el valor pico de la entrada (Vp), de 13,57 V a 21,21 V; el factor de escala Rs es 37,07 mΩ; los valores nominales de los voltajes de salida (V1 y V2) son iguales a 21 V; la amplitud de la portadora (Vt) es 3 V; el valor de la frecuencia de alimentación es 120π rad/s; el valor de la inductancia (L) es 593 μH, y el valor del capacitancia (C) es 40 mF. Se analizó para un período completo de la señal de alimentación por lo que t se evalúo entre 0 s – (1/60) s.
1.2.2 Malla de voltaje
Para regular de forma simultánea las tensiones de salida y la forma de onda de la corriente de entrada se propone construir la referencia del lazo de corriente (v) a partir de dos voltajes de control (v y v^), como se muestra en la Figura 6. En de la referencia del lazo de corriente, asumiendo que la línea de alimentación no tiene contenido DC significativo.
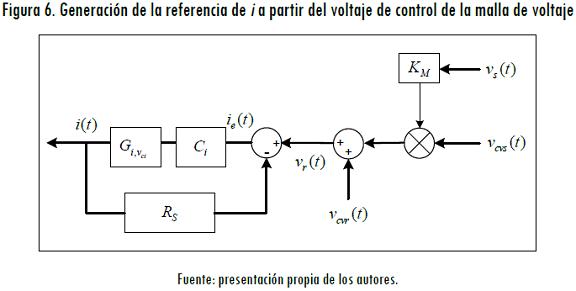
Si la malla de corriente está compensada adecuadamente, los voltajes v y v controlan respectivamente la amplitud CA y CD de la corriente i. Esta relación de los voltajes de control con la corriente i genera un acople entre el contenido armónico de los voltajes de control y el contenido armónico de la corriente de alimentación del circuito. El principal objetivo de la malla de voltaje es mantener regulados los voltajes de salida a un valor constante, sin mayores requerimientos de ancho de banda.
El diseño de los controladores se orienta de forma tal que su respuesta en frecuencia limite el ancho de banda del lazo, para que no exista distorsión significativa en la corriente i producida por la implementación del control. Bajo estas condiciones, las dinámicas relevantes para el diseño del lazo de control de voltaje son lentas en comparación con las dinámicas relevantes del lazo de control de corriente; por lo que es posible suponer que la malla de corriente es ideal (8). Esta simplificación permite encontrar un modelo adecuado para el diseño de los controladores del lazo de voltaje del CFP con una menor complejidad.

Donde:

Suponiendo que la línea de alimentación tiene baja distorsión, se tiene que:

Y a partir de (8) y (9), que:

Donde:

Y a partir de (9) y (10), se encuentra (11):

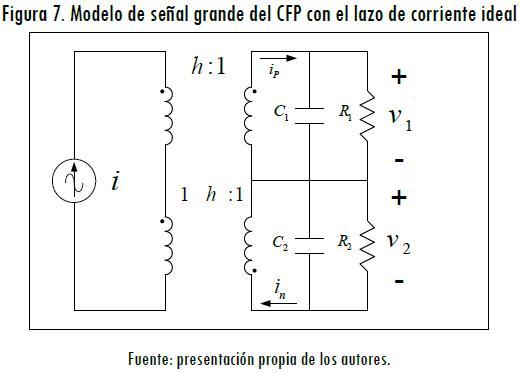
Bajo estas condiciones, el modelo de SG tiene una fuente de corriente en los primarios de los transformadores ideales, como se ilustra en la Figura 7. A partir del modelo de SG original ilustrado en la Figura 2 se puede encontrar el valor del ciclo útil necesario para producir esta fuente de corriente, por medio de (12):

Donde, θ=ωt. A partir de (9), (10), (11) y (12) se obtiene:

Donde:

Bajo el supuesto que 2Lω P << Vp2, la expresión (13) se simplifica a:

A partir del circuito de SG de la Figura 7 y (14) se encuentra:


Donde:



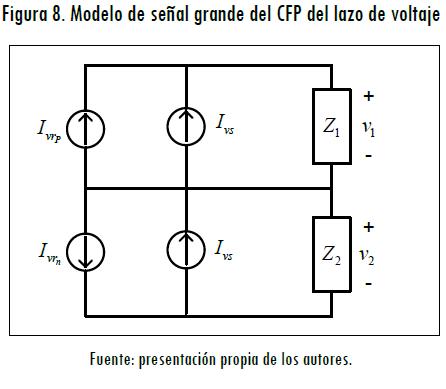
Las dinámicas representativas del lazo de voltaje del CFP se encuentran por debajo de la frecuencia de alimentación del circuito (Cu/277"), por lo que para su modelamiento se parte de las ecuaciones dinámicas que rigen su comportamiento por debajo de la frecuencia de conmutación (3), y se utiliza la técnica de promedio de las señales durante un período de alimentación del circuito (Cu/277") (16), con lo que se obtiene un modelo descrito por (17). Su representación circuital se observa en Figura 8.


Donde:

A partir del circuito de la Figura 8, (15) y (17) se encuentra:

Donde:

Para controlar el voltaje de salida del CFP se utiliza la estrategia de regular la suma de los rieles (v suma) a un valor deseado y la resta de los rieles (resta ) regulada a 0 V A partir de (18) se pueden encontrar que:


A partir de (19) y (15d) se observa un acople de dinámicas entre las variables; sin embargo, suponiendo Z1 = Z2 = Z0, aproximación válida en este tipo de circuitos, se tiene que:


De (20a) y (20b) se observa que el acople existente entre las dinámicas prácticamente desaparece; solamente la dinámica del voltaje de la suma depende de la variable resta. Sin embargo, debido a que la ganancia de acople, por lo general, es mucho menor que 1, la dinámica de la variable vsuma se puede aproximar a:

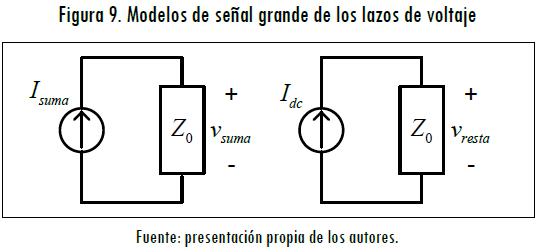
De (20) se observa cómo la magnitud de la corriente CA de entrada (Ip) afecta a vsuma , y cómo la componente CD de la corriente de entrada (Idc) afecta a vresta. La representación circuital de SG de (20) se observa en la Figura 9. Como es evidente, a partir de (20b) y (20c) la malla de resta es lineal, mientras que la malla de suma sigue siendo no lineal, debido al producto de variables. Para hacer lineal el circuito, se linealiza la corriente Isuma . A partir de (20a) y (10b) se tiene:

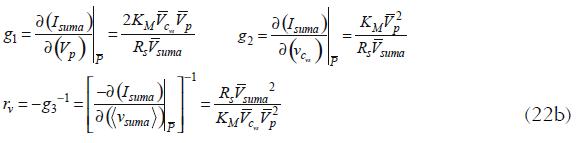
Las ecuaciones resultantes de la linealizacion de (21) se resumen en (22):

Donde:
A partir de (10b), (20b) y (22b) se encuentra el circuito de SP para los dos lazos de voltaje, donde:

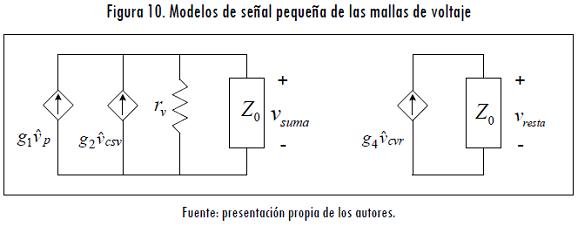
En el circuito de SP de la Figura 10 se encuentran las funciones de transferencia de las variables de control (vcvs y vcvr ) a las variables reguladas (vsuma y v resta),y las funciones de transferencia del disturbio (vp) a las variables reguladasa las variables reguladas (vsuma y v resta) (24).

A partir de (6d), (22), (23) y (24) se obtiene que:

Donde:



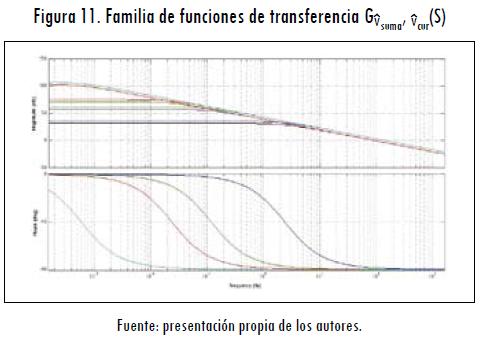
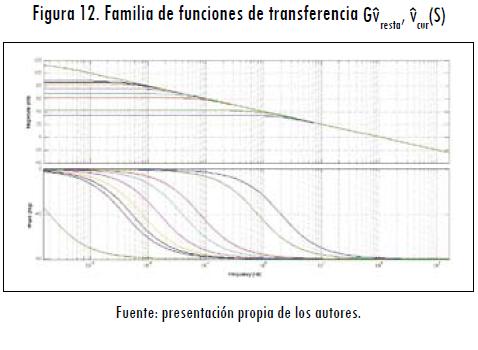
En las figuras 11 y 12 se observa la familia de funciones de transferencia de las plantas para los valores usados en el CFP, implementado en (Fajardo y Ojeda, 2008), donde la carga (R) varía de 5 Ω a 20 kΩ, el valor pico de la entrada (Vp) varía de 13,57 V a 21 V, el factor de escala Rs es 37,07 mΩ, los valores nominales de los voltajes de salida (V1 y V2) son iguales a 21 V por lo que Vsuma = 42 V, la amplitud de la portadora (V) es 3 V, el factor de escala KM es 0,1215(1/V), el valor de VCvs varía de 119 μV a 0,7475 V, el valor de la inductancia (L) es 593 μH, y el valor del capacitancia (C) es 40 mF.
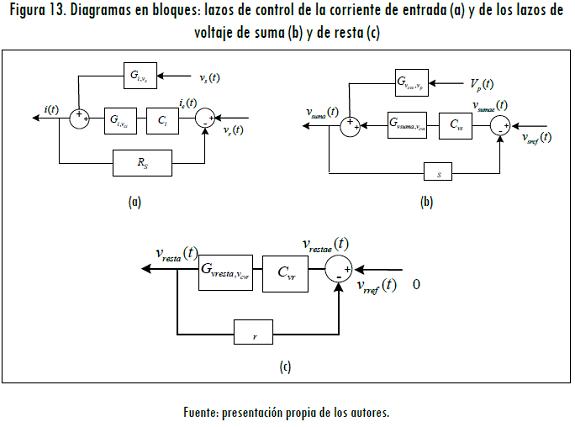
1.3 Esquema de control
Bajo la restricción propia de este modelamiento, el problema del diseño del control se reduce a compensar tres lazos de control, mostrados en la Figura 13, donde debido a todos los posibles puntos de operación se genera una dispersión de parámetros para cada lazo de control. Las familias de funciones de transferencias producidas tanto de la planta como de las perturbaciones deben ser compensadas por el controlador para cada lazo.
2. Resultados y discusión
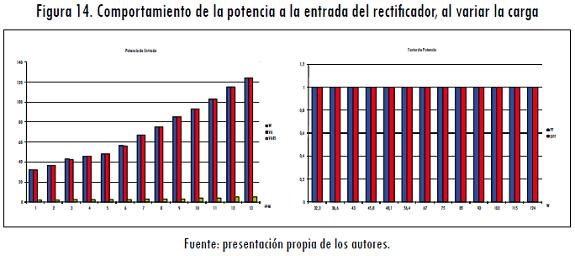
En (Fajardo y Ojeda, 2008) se utilizó el modelamiento presentado en la sección 1 de este artículo como base para construir el conversor AC/DC, implementado en el proyecto: un CFP a 240 W (12 V-20 A), controlado digitalmente por un DSP TMS320LF2812, fabricado por Texas Instruments. En esta sección se reescriben por conveniencia algunos de los resultados obtenidos.
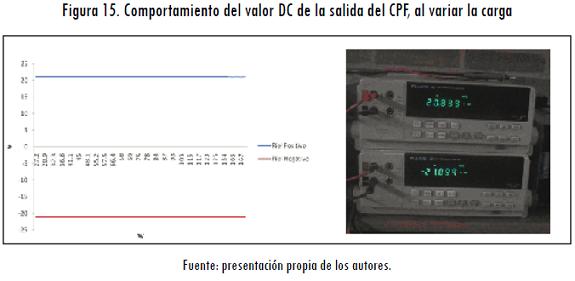
En la Figura 14 se grafican los resultados de las trece variaciones de carga que producen menor potencia promedio de las pruebas realizadas. En la Figura 15, entre tanto, se grafica el comportamiento de los voltajes de salida del CFP para todas las medidas tomadas en las pruebas (izquierda), junto con una fotografía del instrumento de medida utilizado para realizar las medidas de voltaje promedio en los voltajes de salidas (Fluke 45). En estas dos figuras se observa cómo a través del modelamiento propuesto en este artículo es posible diseñar los controles que satisfagan el problema de desempeño del CFP en configuración de medio puente, dado que se obtuvo que la planta siempre funcionará dentro del rango deseado de regulación, tanto para el FP como para los voltajes DC, de manera estable con variaciones de carga.
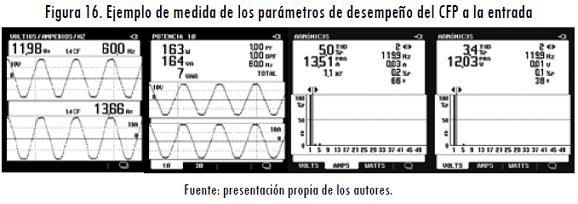
En la Figura 16 se observa un ejemplo de las medidas tomadas con el analizador de línea Fluke 46B, equipo con el cual se realizaron las medidas de desempeño del sistema para la potencia de entrada. En la Figura 17 se observa la implementación del CFP (izquierda) encerrada en un recuadro y la implementación (derecha) en detalle de la etapa de potencia a través de un puente H.

Las mediciones realizadas sobre el circuito implementado llevan a interpretar que el modelo lineal escogido es adecuado para el diseño de los controladores; sin embargo, no se tiene certeza sobre el rango exacto de validez del modelo y sus posibles consecuencias en la estabilidad del sistema. El grupo pretende realizar dos proyectos adicionales sobre este tema: el primero consiste en determinar el rango de frecuencias en el cual el modelo es totalmente confiable para, a partir de esta información, usar las técnicas de control robusto, a fin de analizar tanto la estabilidad robusta de los controladores implementados como su optimización.
La principal razón de usar las técnicas de control robusto es que el mo-delamiento usado en este artículo es adecuado para esta técnica, ya que a través de suposiciones en el momento del modelamiento de la planta como pasar por alto el acople de dinámicas, la variación de parámetros a lo largo del ciclo de vida de la planta, la no linealidad o los efectos parásitos en altas frecuencias, etc. se relaja el nivel de complejidad del modelo (Prieto, 2004). A partir de este modelo se genera un modelo aumentado donde se introducen, por lo general, los efectos en principio despreciados en conjunto a través de variaciones no estructuradas y estructuradas dentro de un rango de frecuencia. Finalmente, a partir de este modelo aumentado lineal se sintetiza la ley de control.
Agradecimientos
Los autores agradecen a la Pontificia Universidad Javeriana, al Departamento de Electrónica y al Laboratorio de Electrónica por el apoyo brindado para el desarrollo de este artículo.
Referencias
EISSA, M. O.; LEEB, S. B.; VERGHESE, G. C. et al. Fast controller for a unity-power-factor PWM rectifier. IEEE Transactions on Power Electronic. 1996, vol. 11, núm. 1, pp. 1-6. [ Links ]
ERICKSON, R. y MAKSIMOVIC, D. Fundamentals of power electronics. 2nd ed. Massachusetts: Kluwer Academic, 2001. [ Links ]
FAJARDO, A. y OJEDA, F. Implementación de un controlador digital para un motor de inducción trifásico. Tesis de Maestría. Bogotá: Pontificia Universidad Javeriana, 2008. [ Links ]
HAY A.; PERILLA, G.; RUIZ, F. et al. Función de transferencia para un rectificador con factor de potencia unitario, configuración de medio puente, controlado por DSP Ingeniería y Universidad. 2005, vol. 9, núm. 1, pp. 9-28. [ Links ]
HITI, S. y BOROJEVIC, D. Robust nonlinear control for boost converter. IEEE Transactions on Power Electronics. 1995, vol. 10, núm. 6, pp. 651-658. [ Links ]
PRIETO, L. D. Análisis de la robustez en la estabilidad y el desempeño de un sistema de control lateral para automóviles. Ingeniería y Universidad. 2004, vol. 8, núm. 2, pp. 113-138. [ Links ]
QIAO, Ch. y SMEDLV, K. A topology survey of single-stage power factor correction with a boost type input-current shaper. IEEE Applied Power Electronics Conference. 2000, vol. 16, núm. 3, pp. 460-467. [ Links ]
REDL, R. y KISLOVSKI, A. Telecom power supplies and power quality. 17th International Telecommunications Energy Conference, 1995. INTELEC 95. The Hague, 1995, pp. 13-21. [ Links ]
SINGH, S.; SINGH, B. N.; CHANDRA, A. et al. A review of single-phase improved power quality AC-DC converters. IEEE Transactions on Industrial Electronics. 2003, vol. 50, núm. 5, pp. 962-981. [ Links ]
SRINIVASAN, R. y ORUGANTI, R. A unity power factor converter using half-bridge boost topology. IEEE Transactions on Power Electronics. 1998, vol. 13, núm. 3, pp. 487-500. [ Links ]
SRIRAM, V B.; SENGUPTA, S. y PRATA, A. Indirect current control of a single-phase voltage- sourced boost-type bridge converter operated in the rectifier mode. IEEE Transactions on Power Electronics. 2003, vol. 18, núm. 5, pp. 1130-1137. [ Links ]
ZHEREN, L. y SMEDLX K. A family of continuous-conduction-mode power-factor-correction controllers based on the general pulse-width modulator. IEEE Transactions on Power Electronics. 1998, pp. 501-510. [ Links ]

