










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkIngeniería y Universidad
Print version ISSN 0123-2126
Ing. Univ. vol.17 no.1 Bogotá Jan./June 2013
Control en un sistema de tanques interactuantes no lineales desde el enfoque de sistemas dinámicos híbridos1
Control in a System of Non-Linear Interacting Tanks from the Perspective of Dynamic Hybrid Systems2
Controle em um sistema de tanques integrados não lineares a partir do enfoque de sistemas dinâmicos híbridos3
Christian Felipe Ramírez-Acosta4
Diego Alejandro Patino-Guevara5
Carlos Eduardo Cotrino6
1Fecha de recepción: 18 de noviembre de 2011. Fecha de aceptación: 10 de agosto de 2012. Este artículo se deriva de un proyecto de investigación denominado Avances en el control de sistemas dinámicos híbridos: aplicación en sistemas de tanques interactuantes no lineales. Número de registro 003632. Desarrollado por el grupo de investigación CEPIT (Control, Electrónica de Potencia y Gestión de la Innovación Tecnológica) financiado por la Vicerrectoría Académica, Proyecto No. 003632 de la Pontificia Universidad Javeriana, Bogotá, Colombia.
2Reception date: November 18th 2011. Admission date: August 10th 2012. This paper originated from a research project titled Avances en el control de sistemas dinámicos híbridos: aplicación en sistemas de tanques interactuantes no lineales. Registry Number 003632. It was carried out by the Control, Electrónica de Potencia y Gestión de la Innovación Tecnológica research group, CEPIT, and financed by the Academic Vice-Rector, Project No. 003632 of the Pontificia Universidad Javeriana, in Bogotá, Colombia.
3Data de recepção: 18 de outubro de 2011. Data de aprovação: 10 de agosto de 2012. Este artigo origina-se do projeto de pesquisa denominado Avances en el control de sistemas dinámicos híbridos: aplicación en sistemas de tanques interactuantes no lineales [Avanços no controle de sistemas dinâmicos híbridos: aplicação em sistemas de tanques integrados não lineares]. Número de registro 0036329. Desenvolvido pelo grupo de pesquisa CEPIT (Controle, Eletrônica de Potência e Gestão da Inovação Tecnológica), financiado pela Vicerrectoría Académica, Projeto No. 003632, da Pontificia Universidad Javeriana, Bogotá, Colômbia.
4Ingeniero electrónico, Pontificia Universidad Javeriana, Bogotá, Colombia. Maestría en Ingeniería Electrónica, Pontificia Universidad Javeriana. Profesor de la Pontificia Universidad Javeriana. Correo electrónico: christian-ramirez@javeriana.edu.co.
5Ingeniero electrónico, Universidad Nacional de Colombia, Bogotá, Colombia. Maestría en Electrónica y Computadores, Universidad de los Andes, Bogotá, Colombia. Docteur en Automatique et Traitement Numérique du Signal. Profesor de la Pontificia Universidad Javeriana, Bogotá, Colombia. Correo electrónico: patino-d@javeriana.edu.co.
6Ingeniero electrónico, Pontificia Universidad Javeriana, Bogotá, Colombia. Master of Science, Stony Brook University, Estados Unidos. Profesor de la Pontificia Universidad Javeriana. Correo electrónico: ccotrino@javeriana.edu.co.
Resumen
Este artículo presenta una metodología para identificar un sistema de tanques interconectados que describe un comportamiento no lineal, como un sistema dinámico híbrido (SDH) basado en el método de identificación de sistemas no lineal bounded error approach. Identificado el sistema de tanques como un SDH, este se representa en variables de estado para aplicar una ley de control por realimentación de estados conmutada, que busca la existencia de una función múltiple de Lyapunov, la cual permite garantizar la estabilidad del sistema conmutado identificado.
Palabras clave: Sistemas dinámicos híbridos, identificación, sistemas no lineales, funciones múltiples de Lyapunov.
Abstract
This paper presents a methodology for identifying a system of interacting tanks that follows a non-linear behavior as a dynamic hybrid system (DHS) based on the method for identifying non-linear systems known as bounded error approach. Having identified this tank system as a DHS, it is represented through state variables to apply a commuted state feedback control law in order to find a multiple Lyapunov function, which would allow us to guarantee the stability of the identified commuted system.
Keywords: Dynamic hybrid systems, identification, non-linear systems, multiple Lyapunov functions.
Resumo
Este artigo apresenta uma metodologia para identificar um sistema de tanques interligados que descreve um comportamento não linear, isto é, um sistema dinâmico híbrido (SDH) baseado no método de identificação de sistemas não linear Bounded error approach. Ao identificar o sistema de tanques como um SDH, ele é representado por variáveis de estado para aplicar uma lei de controle por realimentação de estados comutada que, por sua vez, busca a existência de uma função múltipla de Lyapunov. Essa função garante a estabilidade do sistema comutado identificado.
Palavras chave: Sistemas dinâmicos híbridos, identificação, sistemas não lineares, funções múltiplas de Lyapunov.
Fecha de recepción: 18 de noviembre de 2011. Fecha de aceptación: 10 de agosto de 2012.
Introducción
En los últimos años se han empezado a estudiar sistemas que tienen variables de estado continuas y discretas simultáneamente que están acopladas entre sí (Goebel, Sanfelice y Teel, 2009). Estos sistemas se denominan comúnmente sistemas dinámicos híbridos (SDH) y debido a su reciente aparición, su modelado y el posterior control, tienen muchos aspectos teóricos y prácticos aún no resueltos. En este artículo se expone un sistema de tanques interactuantes no lineal visto desde el enfoque de los SDH. Los tanques interactuantes son considerados dispositivos ampliamente utilizados en todo tipo de industria y en muchas ocasiones requieren un control de alta precisión tanto de flujo de líquido circulante como del nivel de llenado.
Debido a la naturaleza del sistema, los tanques obedecen a un comportamiento no lineal, el cual generalmente se aproxima a una dinámica lineal. Estas aproximaciones llevan a leyes de control que no tienen en cuenta el comportamiento no lineal del sistema. Una razón para usar los SDH es la reducción de complejidad del modelo, puesto que en lugar de representar la dinámica a partir de un conjunto de ecuaciones diferenciales no lineales, se puede representar por medio de un conjunto de ecuaciones simples de comportamiento lineal, las cuales por medio de conmutaciones emulan el comportamiento no lineal de un sistema (véanse Antsaklis, Stiver y Lemmon, 1993; Villa etal., 2004). Los SDH han sido ampliamente estudiados en la última década (Grossman et al., 1993) bajo diferentes perspectivas que no siempre son compatibles entre sí.
La identificación y el diseño de las leyes de control para los SDH, debido a su compleja naturaleza, no ha sido un tema extensamente estudiado en el ámbito nacional colombiano; sin embargo, se han analizado algunas formas de identificación mediante sistemas lineales a tramos y sistemas dinámicos mixtos, además del diseño de estrategias de control utilizando modelos de control predictivo (Villa et al., 2004; Duque et al., 2004; Patiño, 2009; Mcgrath et al., 2007).
Por otro lado, internacionalmente, una de las estrategias más utilizadas para la identificación fue planteada por Bemporad y Morari (1999), Ferrari-Trecata et al. (1999) y Bemporad et al. (2005). Ellos proponen utilizar algoritmos para encontrar modelos de SDH aptos para tareas de control. En cuanto a la estabilidad y el control, los SDH han sido tema de investigación teórica y aplicativa, siendo la estabilidad el tema que más discusión ha generado (Daafouz, Riedinger, e Iung, 2002; Flieller, Riedinger y Louis, 2006; Liberzon et al., 2003).
Se ha comprobado que el problema de regulación alrededor de un valor de referencia puede resolverse mediante teoremas de estabilidad (Daafouz, Riedinger, e Iung, 2002; Hespanha y Morse, 1999), por lo que el uso de estos métodos realmente busca una ley de control por realimentación de estados capaz de estabilizar el sistema independiente de la conmutación, y no se interesa en buscar la mejor forma de conmutar entre los subsistemas posibles.
Este artículo presenta una metodología para identificar un sistema de tanques interactuantes, como un SDH, basado en el método bounded error approach (Bemporad et al., 2005). El algoritmo consiste en dividir un sistema no lineal en varios sistemas lineales y en establecer una región de operación para cada sistema. Identificado el sistema de tanques como un SDH, este se representará en variables de estado para aplicar una ley de control por realimentación de estados conmutada, basados en teoremas de estabilidad expuestos en (Daafouz, Riedinger e Iung, 2002).
El objetivo de este control será regular el sistema alrededor de un punto de referencia con error en estado estacionario igual a cero. El artículo se encuentra organizado de la siguiente manera: la primera sección describe el sistema de tanques interactuantes con el que se implementará la metodología propuesta. La segunda sección describe el algoritmo de identificación de un sistema no lineal como un modelo PWARX. La tercera sección muestra la representación un modelo PWARX en variables de estado. La siguiente sección presenta una estrategia de control para un SDH que garantiza la estabilidad del sistema. Por último, se exponen los resultados obtenidos al implementar la metodología propuesta en el sistema de tanques interactuantes mencionado.
1. Descripción del sistema de tanques interactuantes
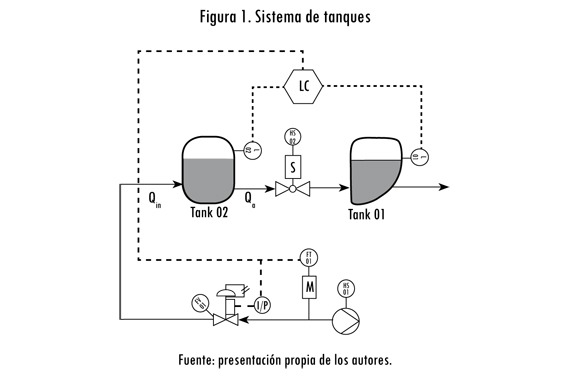
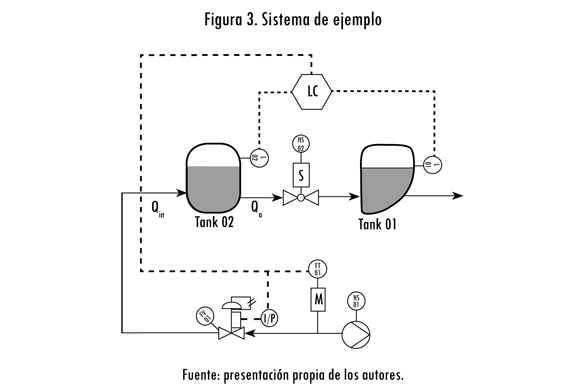
En la figura 1 se presenta un sistema de dos tanques interconectados con un caudal de entrada Qn a través del orifico ubicado en la parte superior de un tanque cilíndrico (Tank 02). Este caudal de entrada genera un caudal de salida Qa a través del orificio ubicado en la parte inferior, el cual —por disposición de una válvula de bola manual— se conecta con el orificio ubicado en la parte inferior del tanque de área transversal no lineal (Tank 01). El caudal Qa funciona como entrada del tanque no lineal. Obsérvese que en la medida que el nivel en el tanque (Tank 01) aumente, la salida del tanque cilíndrico, este se verá afectado por el cambio de la presión diferencial en los extremos de la válvula, y dada la geometría de Tank 01, se producirá un comportamiento no lineal en la dinámica del sistema.
2. Modelado del sistema de tanques como un sistema dinámico híbrido
El sistema de tanques obedece a un comportamiento no lineal que generalmente se aproxima a una dinámica lineal. Este modelo lineal no es capaz de describir con precisión la dinámica real del sistema. Para mejorar la precisión del modelo se utilizan técnicas de identificación de sistemas no lineales. Esta sección se centra en la identificación de un sistema no lineal como un modelo exógeno autorregresivo a trozos (PWARX) que se obtiene con datos adquiridos del sistema (entradas y salidas pasadas). Estos modelos representan la estructura de una caja negra con la que prácticamente se puede describir cualquier dinámica no lineal (Heemels, Schutter y Bemporad, 2001). Esta sección se basa en el método propuesto en (Bemporad et al., 2005) para identificar un modelo PWARX del sistema de tanques interactuantes de la figura 1.
Considérese un modelo PWARX como:

Donde:

y uk ∈ R es la entrada del sistema, yk ∈ R es la salida y ∈k ∈ R es el error. Por lo tanto, el sistema tiene una salida, y una entrada. xk ∈ Rn es el vector de regresión que depende de nu valores pasados de la salida y de nu valores pasados de la entrada. Esto quiere decir que xk tiene n = ny + nu componentes. F es un campo vectorial a trozos de la forma:

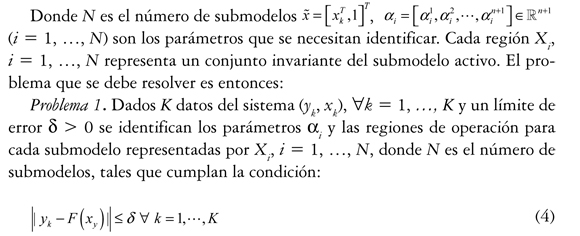
Hipótesis 1. El orden de cada submodelo ARX n es definido a priori (n = nu + ny ).
Basados en el algoritmo (Bemporad et al., 2005) se busca desarrollar una metodología que permita encontrar un modelo PWARX que describa el sistema de tanques.
2.1. Algoritmos
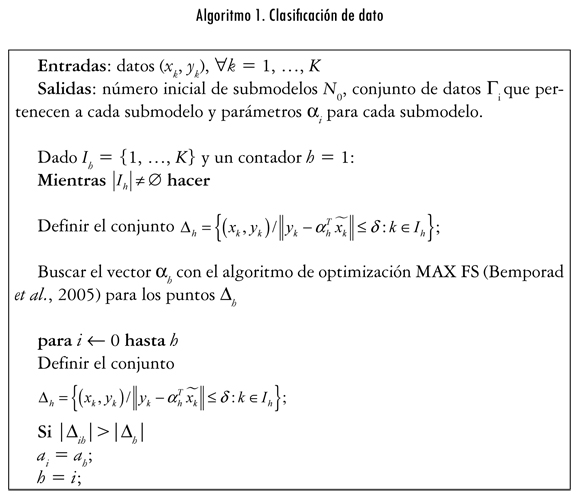
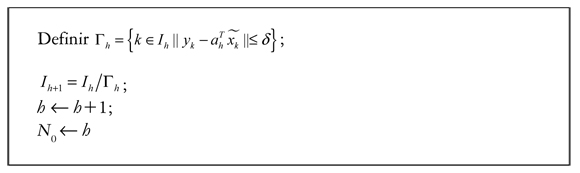
El procedimiento consiste básicamente en una clasificación inicial, un refinamiento de la clasificación y una estimación de la región de operación. El algoritmo 1, que se presenta en (Bemporad et al., 2005), es la base con la que se determina el número inicial de submodelos. Los algoritmos 2, 3 y 4 corrigen errores en la identificación y dan como resultado los parámetros óptimos α*. Para estimar la región de operación de cada submodelo se utiliza un algoritmo de clustering, por ejemplo, un support vector machine (Cortés y Vapnik, 1995) o una programación lineal robusta (Bennet y Mangasarian, 1995).
2.1.1. Clasificación de datos
El algoritmo 1 consiste en encontrar los datos (y , xk) que verifiquen la ecuación (4), tal que F contenga el menor número posible de submodelos con la mayor cantidad de datos. Esto significa que para un i fijo, se debe buscar los parámetros (O i ) que cumplan la desigualdad mostrada en la ecuación (4) para el mayor número de datos. Cuando un submodelo de F logra explicar los datos, estos se retiran del proceso de clasificación. Los datos que no logran explicarse con ningún submodelo de F repiten el procedimiento hasta que se encuentren clasificados. La salida del algoritmo es, entonces, un número de submodelos iniciales N0, el conjunto de datos Γi a los que pertenece cada submodelo i-ésimo y los parámetros αi para cada submodelo.
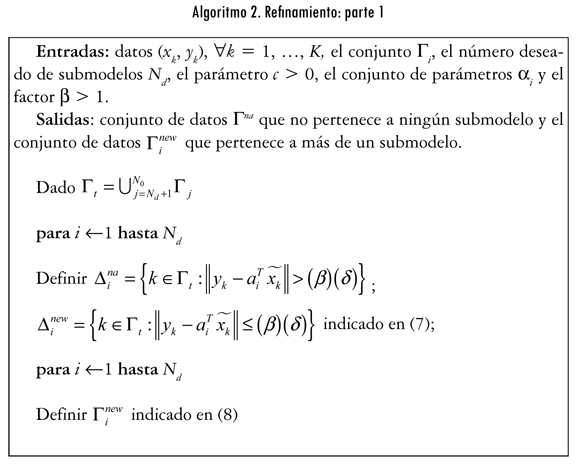
2.1.2. Refinamiento
Una vez obtenido N submodelos a través del algoritmo 1, se realiza una modificación propuesta por este trabajo de investigación, puesto que, usualmente, el algoritmo 1 retorna más modelos de los que se necesita.
Hipótesis 2. Nd es el número deseado de submodelos que conformarán el modelo PWARX y es conocido.
Esta parte de la identificación consiste en reducir el número de submodelos No a Nd tal que Nd < No.
Los puntos que no cumplen con la condición (4) para un modelo en particular i, i ∈ I = {1, ..., Nd} se agrupan en un nuevo conjunto:

Dado que el objetivo es reducir el número de submodelos a Nd, el factor de error se incrementa por un factor de β > 1. Por lo tanto, se tiene un nuevo conjunto de desigualdades Δnew, definido como:

Los puntos que aún con el incremento en el error no satisfacen (6) en ninguno de los submodelos deseados se agrupan en Γna.
El conjunto Δnew se usa entonces para encontrar los siguientes subconjuntos
- Γnew representa el conjunto de puntos que pertenece únicamente a un submodelo i ∈ I .
- Γ rev: representa el conjunto de puntos que pertenece a más de un submodelo i ∈ Id


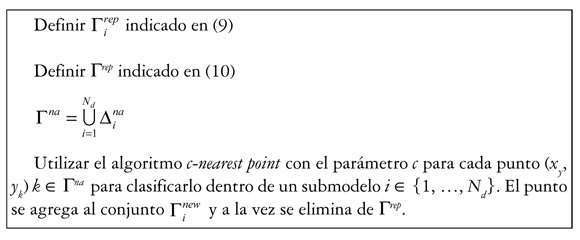
El conjunto de puntos Γrepi son aquellos puntos que pertenecen a más de un submodelo. La unión de todos estos subconjuntos se puede agrupar para formar el conjunto Γrep

Este nuevo conjunto contiene los datos que deben clasificarse una vez más por algún otro método. Para este caso, los datos se clasifican por medio del algoritmo c-neareast point, basado en el criterio de la distancia euclidiana. El algoritmo consiste en tomar los c puntos más cercanos al punto k ∈ Γrep y dependiendo del submodelo que se encuentre más cercano al punto, se toma la decisión para clasificarlo.
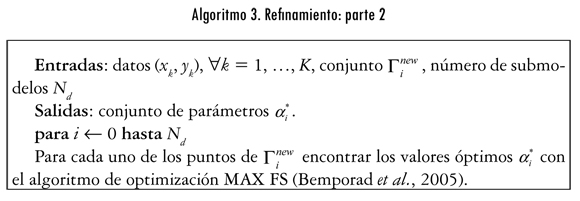
Si todos los puntos cercanos pertenecen al mismo submodelo, la decisión es trivial; pero si hay dos submodelos con el mismo número de puntos cercanos entre los puntos c, el k ∈ Γrep es asignado al submodelo i ∈ I = {1, ..., Nd} con la distancia media más baja. Este punto se agrega a Γnew y se elimina de Γrep. Con el conjunto Γnew se encuentran los valores óptimos para los parámetros α* utilizando el algoritmo de optimización MIN PFS. Este procedimiento se realiza gracias el algoritmo 2, y se tienen como resultado los conjuntos Γnew y Γna. El algoritmo 3 permite cambiar la dimensión de cada submodelo i para que esta sea Nd.
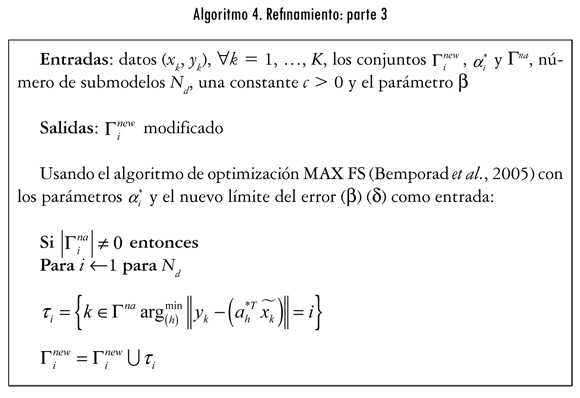
Finalmente, el algoritmo 4 prueba los datos adquiridos con los parámetros α* y con el nuevo límite de error (β) (δ). Esto implica que el algoritmo 2 se utiliza nuevamente, con lo que se corre el riesgo que |Γna| ≠ Φ 0 (puntos que aún no han sido clasificados). Entonces el modelo correspondiente i para un punto k e Γna se encuentra por medio de:

2.2. Estimación de la región
Por último, para obtener las regiones Xi, i e {1, ., Nd} cada punto (yk, xk) debe ser clasificado. El método utilizado en este caso es support vector machines (SVM) (Duda, Hart y Stork, 2000). Una SVM es un modelo que representa los puntos de muestra en el espacio, separándolos en clases por un espacio lo más amplio posible. Este busca superficies en un espacio Rn que separe de forma óptima los puntos de una clase de la otra.
3. Transformación de un modelo PWARX a espacio de estados
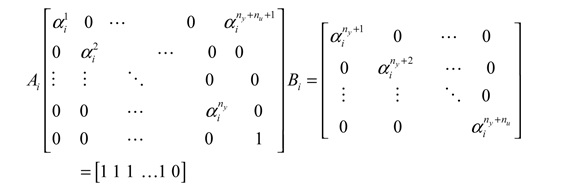
En la sección anterior se presentó una metodología para identificar un sistema no lineal como un modelo PWARX. Este modelo está conformado por un campo vectorial a trozos, como se muestra en la ecuación (3). El objetivo es transformar las ecuaciones del campo vectorial de (3) a una representación en variables de estado, para facilitar el diseño de una ley de control por realimentación de estados. El modelo en variables de estado tiene la siguiente forma:
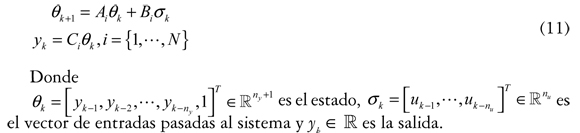
Nótese que el vector xk definido en la ecuación (2) está compuesto entonces por 6k y Sk. Las matrices A ., B. y C se definen como:
4. Diseño de la ley de control
Con el modelo PWARX transformado a variables de estado, se procede a buscar una técnica de control que garantice la estabilidad del sistema y permita regular el nivel del Tank 01, dada una referencia. La técnica de control es una realimentación de estados que consiste en buscar una función de Lyapunov que garantice la estabilidad asintótica del sistema conmutado descrito por la ecuación (11).
4.1. Formulación del problema
El problema consiste en diseñar un controlador que garantice la estabilidad del sistema (11), independiente de cómo conmuta. Este artículo se basa en una realimentación de estados conmutada de la forma σ, = K θ,, a fin de obtener un sistema en lazo cerrado de la forma:

Hipótesis 3. Todos los estados son medibles.
Como es bien sabido, una realimentación de estados tiene un error en estado estacionario significativo. Por lo tanto, con el fin de eliminar este error y dar robustez al sistema se agrega un integrador dentro del lazo de control. Una forma de introducir este integrador en el modelo matemático es con la ayuda de un nuevo vector de estado, que integre la diferencia entre la referencia del sistema y el vector de salida y como se observa en la figura 2.
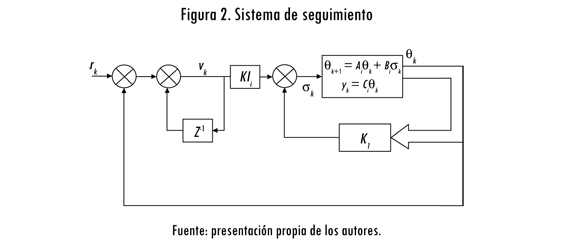
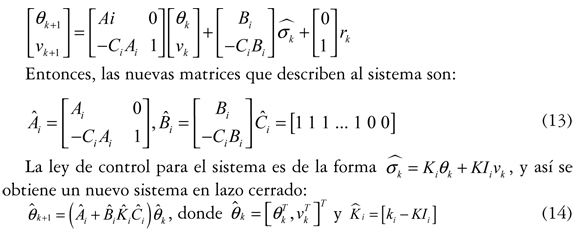
La representación en variables de estado para el lazo de control que se muestra en la figura 2 está dada por:
4.2. Control por estabilización
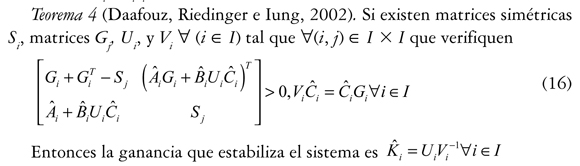
El diseño de la ley de control conmutado se reduce al diseño de ganancias de realimentación que garanticen la estabilidad del sistema en lazo cerrado. Los siguientes teoremas muestran una condición suficiente basada en funciones múltiples de Lyapunov con la que se puede estabilizar un sistema conmutado usando una realimentación de estados
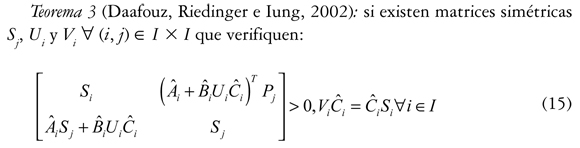
Entonces la ganancia que estabiliza el sistema independiente de las conmutaciones es Ki = UiVi ∀i ∈ I
5. Resultados
A lo largo de este artículo se ha presentado una metodología que permite la identificación de un sistema no lineal como un modelo PWARX. A partir del modelo a trozos se propone una estrategia de control por realimentación de estados que garantiza la estabilidad del sistema alrededor de un punto de referencia. El sistema que se utilizará como ejemplo se presenta en la figura 1. Por facilidad al lector se vuelve a presentar en la figura 3.
5.1. Identificación sistema de tanques como un SDH
Las ecuaciones diferenciales que describen el comportamiento del sistema de la figura 3 son:

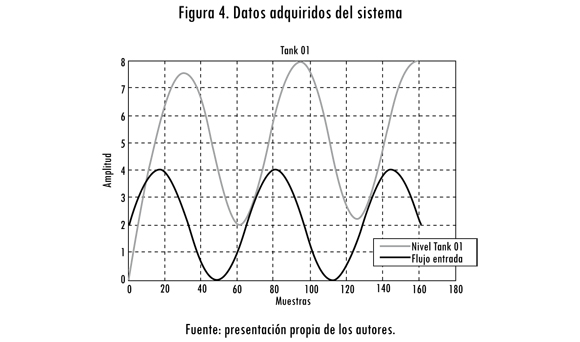
Donde h2 es el nivel de Tank 02, h1 es la altura de Tank 01AK-001, Gf es la gravedad específica, Cv el coeficiente de flujo de la válvula que se encuentra entre los tanques y ρ. Se puede ver claramente que el modelo matemático desarrollado para el sistema de tanques determina que el sistema se comporta de manera no lineal. Para representar el sistema de tanques como un modelo PWARX se utilizan los algoritmos presentados en la sección 3. Para iniciar la clasificación es necesario tener una base datos del sistema. Estos datos son adquiridos por medio de una simulación del sistema de tanques no lineal con la ayuda del software Matlab & Simulink. Al sistema se le aplican flujos de entrada con magnitudes y frecuencias diferentes, como la que se observa en la figura 4. Para poder aplicar los algoritmos mencionados se realiza la siguiente hipótesis:
Hipótesis 4. El orden del sistema debe ser seleccionado a priori. Por lo tanto n = 3, con = 1 y = 1. Se obtiene que el vector de regresión es igual a xk = [yk-1, uk-1].
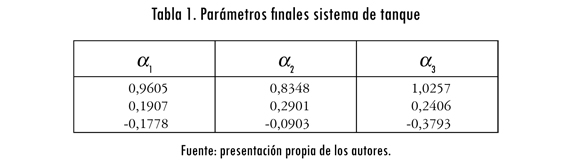
Como parámetro de entrada del algoritmo 1 se necesita imponer un umbral de error δ. En este caso se asume δ = 0,05. En el algoritmo 2, los parámetros de entradas seleccionados son β = 1,2 (este es el factor con el que se aumenta en límite del error), Nd = 3, que es el número deseado de submodelos, c = 4 con el que se le indica al algoritmo 2 la cantidad de puntos cercanos que debe tener en cuenta para el proceso reclasificación. Al final de la identificación obtenemos que los parámetros óptimos son los observados en la tabla 1. Cabe mencionar que únicamente 5 puntos de los 720 puntos que se utilizaron para la identificación no pudieron clasificarse.
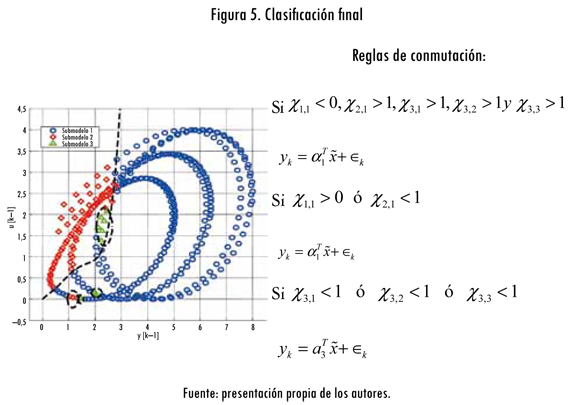
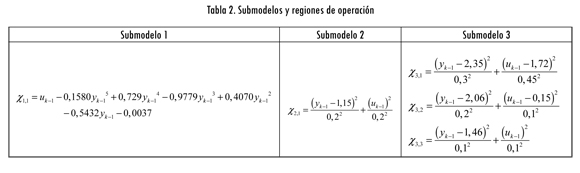
En la figura 5 y la tabla 2 se observan los submodelos y las regiones de operación Xi, i ∈ Id obtenidas para cada submodelo.
Para validar el modelo PWARX utilizamos el coeficiente denominado FIT con el que podemos medir la veracidad de la identificación del modelo PWARX respecto al sistema real. Este se encuentra definido por:

el vector de salidas del sistema real, y = (y1, ..., yN) es el vector de salida del modelo PWARX y y que es el valor promedio del vector y. La figura 6 compara la señal real y la simulada en el modelo PWARX. También se observa la conmutación entre los submodelos del modelo PWARX. Los valores del FIT obtenidos en esta figura es de 83,6726 %. Esto significa que el modelo PWARX sigue a la salida real del sistema en este porcentaje. Estos valores son lo suficientemente altos para validar el modelo PWARX. Cabe aclarar que si se desea mejorar el FIT de la identificación, el número de submodelos debe ser ampliado. No se muestran más pruebas por falta de espacio.
5.2. Transformación del modelo PWARX a variables de estado y control para un sistema dinámico híbrido
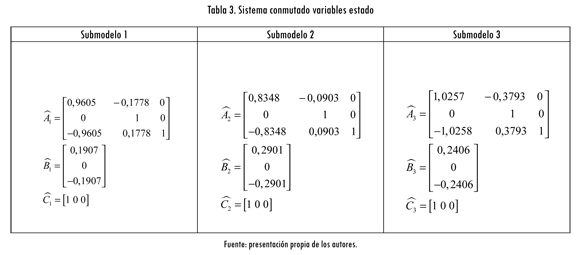
Con los parámetros αi y las regiones Xi identificados, el modelo PWARX se representa en variables de estado como se explicó en la sección 3. Por parte de la ley de control que se va a implementar, esta es una realimentación de estados con integrador (véase sección 4) y se obtiene el sistema conmutado descrito por las matrices que se observan en la tabla 3.
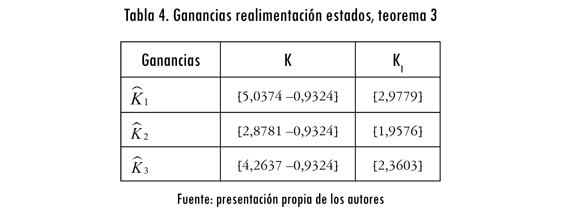
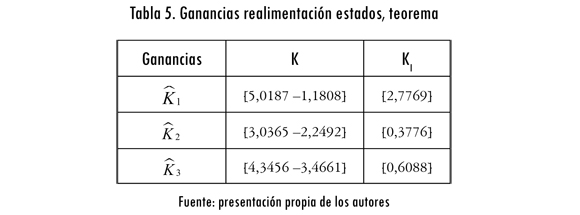
Definido el sistema conmutado, utilizamos los teoremas 3 y 4 para encontrar las ganancias de la realimentación de estados conmutada. El objetivo de estas ganancias es el de garantizar la estabilidad del sistema alrededor de una referencia que, en este caso, es el nivel del Tank 01. Las tablas 4 y 5 muestran las ganancias obtenidas.
Para comprobar el funcionamiento de la ley de control obtenida a través de los teoremas 3 y 4, se ingresa al sistema como referencia un nivel deseado para el tanque Tank 01. Los resultados del lazo de control se muestran en las figuras 7, 8, 9 y 10 para referencias de 0,35 m y 0,45 m de cada una de las leyes de control respectivamente.
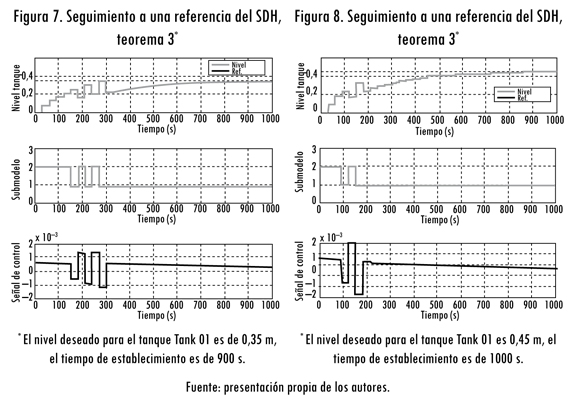
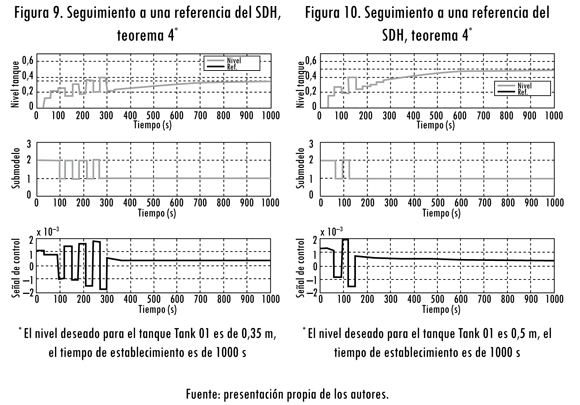
En las figuras siguientes se observa el funcionamiento del lazo control en el sistema conmutado. Estas figuras muestran la estabilidad del sistema y un error en estado estacionario igual a cero. También se puede observar que los tiempos de establecimiento y las curvas de respuesta son diferentes para cada referencia. Esto se debe al comportamiento no lineal que presenta el sistema de tanques. A medida que el sistema sigue la referencia, se observan las conmutaciones entre los submodelos. Estas conmutaciones son aleatorias y no tienen un límite establecido.
Se puede observar también que al momento de conmutar se genera un cambio brusco en las acciones de control, lo que puede generar daños en los actuadores del sistema. Teniendo en cuenta estos efectos, la utilización de técnicas de conmutación suave, como el que se presenta en (Zaccarian y Teel, 2005), sería una herramienta útil en el momento de implementar esta estrategia de control en un sistema real.
Conclusiones y trabajos futuros
La metodología propuesta en este artículo ha probado ser útil para identificar y resolver el problema de control en un sistema no lineal, como lo es el sistema de tanques interactuantes. Se puede observar cómo el método de identificación del sistema no lineal permite obtener un modelo PWARX a partir de datos tomados del sistema. Una vez obtenido el modelo, el problema de control se resuelve a través de un análisis de estabilidad del sistema donde el objetivo es buscar las ganancias de una realimentación de estados conmutada que garantice la estabilidad del sistema alrededor de un punto de referencia. Establecida la metodología para identificar y controlar un sistema no lineal, se construirá un sistema de tanques con el objetivo de implementar el método de identificación y control expuesto en este artículo.
Referencias
ANTSAKLIS, P; STIVER, J. y LEMMON, M. Hybrid system modeling and autonomous control systems. Lecture Notes in Computer Science. 1993, vol. 736, pp. 366-392. [ Links ]
BEMPORAD, A.; FERRARI-TRECATA, G. y MORARI, M. Observability and controllability of piecewise afine and hybrid systems. Proceedings of the 38 th IEEE Conference on Decision and Control. 1999, vol. 4, núm. 1, pp. 3966-3971. [ Links ]
BEMPORAD, A. et al. Bounded error approach to piecewise affine system identification. IEEE Transactions On Automatic Control. 2005, vol. 50, núm. 10, pp. 1567-1580. [ Links ]
BENNET, K. P. y MANGASARIAN, O. L. Robust linear programming discrimination of two linearly inseparable sets. Optimization Methods and Software. 1995, vol. 1, núm. 1, pp. 23-34. [ Links ]
CORTÉS, C. y VAPNIK, V Support-vector networks. 1st ed. Berlin: Springer-Verlag, 1995. [ Links ]
DAAFOUZ, J.; RIEDINGER, P. e IUNG, C. Stability analysis and control synthesis for switched systems: A switched Lyapunov function approach. IEEE Transactions on Automatic Control. 2002, vol. 47, núm. 11, pp. 1883-1887. [ Links ]
DUDA, R.; HART, O. y STORK, D. Pattern classification. 2nd ed. New York: Wiley-Interscience, 2000. [ Links ]
DUQUE, M. et al. Control de sistemas híbridos usando el acercamiento MLD. Parte I: modelamiento. Congreso Nacional de la Asociación Colombiana de Automática, 2004. [ Links ]
FERRARI-TRECATA, G.; BEMPORAD, A. y MORARI, M. Observability and controllability of piecewise affine and hybrid systems. Proceedings of the 38th IEEE Conference on Decision and Control. 1999, vol. 4, núm. 1, pp. 3966-3971. [ Links ]
FLIELLER, D.; RIEDINGER, P. y LOUIS, J.P. Computation and stability of limit cycles in hybrid systems. Nonlinear Analysis. 2006, vol. 64, núm. 2, pp. 352-367. [ Links ]
GOEBEL, R.; SANFELICE, R. y TEEL, A. Hybrid dynamical systems. IEEE Control Systems Magazine. 2009, vol. 29, núm. 2, pp. 28-93. [ Links ]
GROSSMAN, R. L. et al. Hybrid systems. Berlin: Springer-Verlag, 1993. [ Links ]
HEEMELS, M.; SCHUTTER, B. y BEMPORAD, A. Equivalence of hybrid dynamical models. Automatica. 2001, vol. 37, núm. 7, pp. 1085-1091. [ Links ]
HESPANHA, J. P. y MORSE, A. S. Stability of switched systems with average dwell time. Proceedings of the 38th IEEE Conference on Decision and Control. 1999, vol. 3, núm. 1, pp. 2655-2660. [ Links ]
LIBERZON, D. Switching in systems and control. 1st ed. Boston: Birkhauser, 2003. [ Links ]
MCGRATH, B. et al. Predictive control of a flying capacitor converter. American Control Conference. 2007, vol. 1, pp. 3763-3768. [ Links ]
PATINO, D. Control of limit cycles in hybrid dynamical systems: An introduction to cyclic switched systems. Application to power converters. Berlin: LAP Publishing, 2009. [ Links ]
VILLA, J. L. et al. Modelamiento y control de sistemas híbridos. Revista de Ingeniería. 2004, vol. 19, núm. 1, pp. 177-182. [ Links ]
ZACCARIAN, L. y TEEL, A. The L2 (l2) Bumpless transfer problem for linear plants: Its definition and solution. Automatica. 2005, vol. 41, núm. 7, pp. 1273-1280. [ Links ]
