










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkTecnoLógicas
versão impressa ISSN 0123-7799versão On-line ISSN 2256-5337
TecnoL. no.30 Medellín jan./jun. 2013
Artículo de Investigación/Research Paper
Control Global del Péndulo de Furuta Empleando Redes Neuronales Artificiales y Realimentación de Variables de Estado
Global Control of the Furuta Pendulum Using Artificial Neural Networks and Feedback of State Variables
Luisa F. Escobar-Dávila1, Oscar D. Montoya-Giraldo2, Didier Giraldo-Buitrago3
1Ing. electricista, Facultad de Ingeniería, Universidad Tecnológica de Pereira, Pereira-Colombia, lfescobar@utp.edu.co
2Ing. electricista, Facultad de Ingeniería, Universidad Tecnológica de Pereira, Pereira-Colombia odmontoya@utp.edu.co
3Ing. electricista, Facultad de Ingeniería, Universidad Tecnológica de Pereira, Pereira-Colombia dgiraldo@utp.edu.co
Fecha de recepción: 11 de septiembre de 2012 / Fecha de aceptación: 22 de junio de 2013
Resumen
En este artículo se presenta el modelado matemático para la planta conocida como Péndulo de Furuta mediante funciones de energía, teniendo en cuenta las dinámicas no lineales propias de los sistemas físicos y considerando los acoples existentes entre los dispositivos eléctricos y mecánicos. Se desarrolla un proceso de control basado en Realimentación de Variables de Estado (RVE) para el punto de equilibrio y se abordan dos temáticas para la zona no lineal de la planta. En primera instancia se implementan funciones que representan los estados energéticos de la planta en forma global y se establecen las regiones de operación (zona de ‘’Swing Up’’) y finalmente se emplean Redes Neuronales Artificiales (RNA) para emular el comportamiento de las funciones de energía. Finalmente se presenta la combinación de las técnicas de control, considerando las restricciones propias de los actuadores y sensores utilizados, además se realiza un estudio desde un ambiente simulado de los fenómenos físicos que pueden alterar el comportamiento del sistema y se verifica la capacidad, robustez y sensibilidad del controlador.
Palabras clave:Modelo matemático, Péndulo de Furuta, variables de estado, Redes Neuronales Artificiales, control híbrido.
Abstract
This paper presents the mathematical modeling of the Furuta Pendulum by power functions, taking into account the non linear own dynamics of the physical systems and considering the existing couplings between the electric and mechanic devices. A control process based on feedback of state variables (FSV) for the equilibrium point is developed and two topics for the non linear zone are addressed. First of all, functions are implemented to represent the energetic states of the plant in a global way and the operation regions are established (“Swing up” zone), and later Artificial Neural Networks (ANN) are employed to simulate the behavior of the energy functions. Finally, it is presented the combination between the control techniques, considering the own constrains of the actuators and sensors used, besides of this, a study is done in a simulated environment of the physical phenomena that may disturb system behavior, and the capacity, sensitivity and robustness of the controller is verified.Keywords: Mathematical model, Furuta Pendulum, state variables, artificial neural networks, hybrid control.
1. Introducción
El sistema péndulo de Furuta es una planta netamente académica, que se estudia con el fin de desarrollar esquemas y estrategias de control eficientes y robustas capaces de manejar las dinámicas no lineales presentes en la mayoría de sistemas físicos de la industria (De la Torre, 2004). Los diseños de control que se emplean en el sistema péndulo rotacional invertido, son en general aplicados a sistemas de telecomunicación y transporte, mostrando la versatilidad y adaptabilidad de estos equipos a problemas de la vida real.
Diseñar sistemas de control globales implica elevados costos computacionales que en muchas ocasiones resultan injustificables, es allí donde toma fuerza la implementación de técnicas híbridas que sin sacrificar el objetivo principal del control, permiten maximizar el uso de los recursos y minimizar los esfuerzos eléctricos y mecánicos en los actuadores. Sin duda alguna habrá gran cantidad de combinaciones posibles y eficientes, no obstante para este trabajo se ha escogido un control aplicando RVE por ser una técnica reconocida por su eficacia y fácil implementación, además se usará una RNA porque al ser una técnica inteligente permite generalizar patrones de comportamiento en sistemas físicos de complejo modelado.
El péndulo de Furuta es un mecanismo que fue diseñado por el Doctor Katsuhisa Furuta en 1992 (Furuta et al., 1992) como una solución alterna a las limitaciones físicas que presenta el péndulo invertido tradicional. Las mejoras al modelo consisten en generar una trayectoria circular que en teoría no limita la posición del péndulo; sin embargo liberar estas restricciones incluye en la planta dinámicas no lineales de orden superior que dificultan el desarrollo de modelos matemáticos con un alto grado de exactitud, razón por la cual se abordan metodologías matemáticas de alto nivel con el fin de tener un alto grado de aproximación a los fenómenos reales presentes en el sistema (Rodríguez et al., 2012).
En la actualidad el diseño de controladores para sistemas pendulares presupone un reto dadas sus características físicas y su similitud con diferentes equipos a nivel industrial, es así como para la realización de este artículo se tienen en cuenta aportes realizados en investigaciones anteriores.
En 2002 se presentó el diseño de un controlador para el péndulo rotacional invertido a través de la aplicación de la dinámica de Newton para obtener un modelo en espacio de estados que se linealiza alrededor del punto de operación y se implementa un controlador en tiempo discreto por reubicación de polos. Los autores mencionan que se emplea una técnica que utiliza las propiedades energéticas de la planta a través de una función de energía de Lyapunov que asegura la atracción de sistema a zonas cercanas al origen o punto de operación; sin embargo esto no se muestra en el trabajo. Los resultados presentan la implementación de controlador eficiente en puntos cercanos a la región de operación de la planta (Valera et al., 2002).
En 2004 se presenta un trabajo de grado en el que se propone realizar un controlador con base en la regulación de energía, lo que requiere de un modelado fundamentado en técnicas matemáticas avanzadas como son la formulación Lagrangiana y Hamiltoniana incluyendo sobre estos, características o restricciones físicas que son inherentes a los sistemas físicos. Los resultados obtenidos fueron satisfactorios ya que lograron el objetivo trazado inicialmente, obteniéndose así un controlador con un correcto desempeño (De la Torre, 2004).
En el trabajo desarrollado en el año 2009 los autores presentaron el diseño de un controlador en dos etapas, la primera de ellas aplica la dinámica de Hamilton para conocer en cada instante de tiempo la energía de la planta en función de sus características físicas, con lo que se logra balancear el sistema a regiones cercanas al punto de equilibrio; en la segunda etapa se desarrolla un control por modos deslizantes que sostiene al sistema físico en el punto de operación. Los resultados obtenidos fueron exitosos y presentan un control robusto con la capacidad de rechazar perturbaciones y continuar en operación aún ante variaciones en los parámetros físicos de la planta (Ibargüen et al., 2009).
El objetivo de este artículo es presentar las bases teóricas para una posible implementación con equipos de laboratorio de las técnicas de control estudiadas y validar desde simulación el modelo matemático del sistema en forma global para mostrar la robustez del controlador ante los diferentes patrones de entrada. La sección 2 muestra el modelo matemático de la planta, en la sección 3 se realiza el diseño de controlador utilizando RVE para la región de equilibrio definida en la posición vertical superior, se muestra la fundamentación sobre redes neuronales artificiales, el prototipo de red utilizada y posteriormente el proceso de aprendizaje de la RNA para la zona no lineal. La sección 4 presenta los resultados obtenidos utilizando el modelo energético acoplado así como el estudio de fenómenos físicos inherentes a los sistemas físicos. Finalmente en la sección 5 se presentan las conclusiones.
2. Modelado matemático del péndulo de furuta
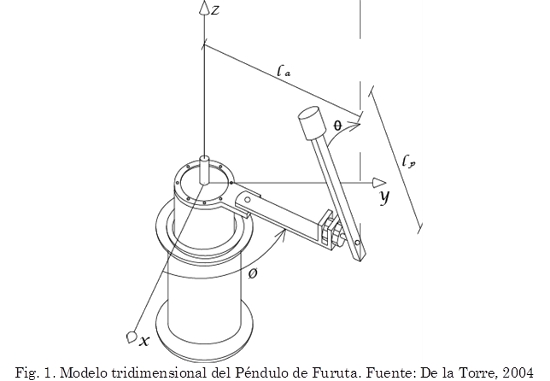
Como se puede observar en la Fig. 1, el sistema conocido como Péndulo de Furuta consta de dos cuerpos inerciales conectados. Un pilar central (eje del motor) con momento de inercia J conectado al brazo horizontal de longitud la y masa ma en uno de sus extremos, en el extremo restante se articula un péndulo con longitud lp de masa mp y se considera una masa de balance en la parte superior del péndulo de magnitud M. El ángulo del péndulo θ se ha definido como cero en la posición vertical superior, y positivo, cuando el péndulo se mueve en la dirección de las manecillas del reloj. El ángulo del brazo horizontal φ se ha definido como positivo cuando el brazo se mueve en la dirección opuesta a las manecillas del reloj.
Para el desarrollo de este modelo se tienen en cuenta las siguientes suposiciones: no se considera fricción existente entre los acoples mecánicos ni pérdidas de energía por rozamiento con el aire, además se asume una distribución uniforme de masa en cada una de las barras, es decir, sistema homogéneo (Vieira, 2010).
Las ecuaciones (1) y (2) modelan en el comportamiento general de la planta y se presentan tras un desarrollo matemático extenso empleando funciones de energía y ecuaciones de Lagrange (Vieira, 2010; De la Torre, 2004; Cazzolato & Prime, 2008).

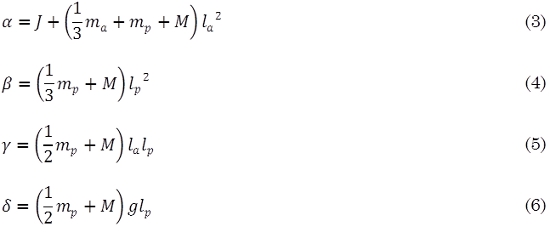
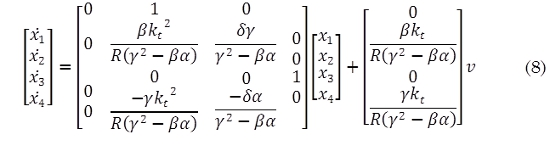
Las constantes α, β, γ y δ están en función de los parámetros del sistema y se presentan como (3), (4), (5) y (6).
2.1 Modelo del motor de corriente continua
Un motor de corriente continua es un elemento transformador de energía eléctrica en energía mecánica rotacional, esto se logra al aplicar una fuerza electromotriz (comúnmente denominada voltaje o tensión) en los terminales del motor, generando un flujo de corriente que produce un campo magnético, el cual que interactúa con el campo producido por los imanes permanentes del motor, produciendo un movimiento rotatorio en el rotor de la máquina. En un motor de corriente continua el torque generado puede ser expresado en función del voltaje aplicado y de la velocidad angular de eje como se muestra en (7) y depende de las constantes físicas asociadas a su construcción (Osorio, 2009).

2.2 Puntos de equilibrio y modelo matemático linealizado
Considerando como variables de estado las posiciones y velocidades angulares de cada una de las barras, se tiene:  . Los puntos de equilibrio del sistema estarán dados por las velocidades angulares iguales a cero y la posición vertical superior e inferior del péndulo. Cabe notar que ésta última es independiente de la posición angular de la barra horizontal (Osorio, 2009). Al linealizar el modelo matemático del sistema representado por (1) y (2) en el punto de equilibrio vertical superior con las variables de estado que se definieron, se obtiene el sistema en espacio de estados (8).
. Los puntos de equilibrio del sistema estarán dados por las velocidades angulares iguales a cero y la posición vertical superior e inferior del péndulo. Cabe notar que ésta última es independiente de la posición angular de la barra horizontal (Osorio, 2009). Al linealizar el modelo matemático del sistema representado por (1) y (2) en el punto de equilibrio vertical superior con las variables de estado que se definieron, se obtiene el sistema en espacio de estados (8).
Finalmente las salidas de interés están dadas por (9):

3. Diseño del controlador
3.1 Control por realimentación de variables de estado
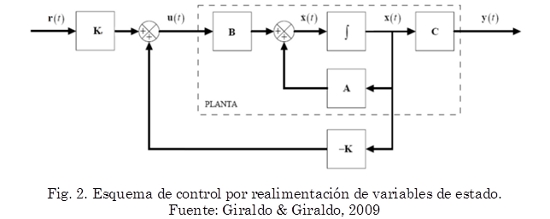
El esquema de control por realimentación de variables de estado de la Fig. 2, considera el sistema en lazo cerrado para la señal de control y una ganancia de lazo abierto para el seguimiento de referencia (Giraldo & Giraldo, 2009).
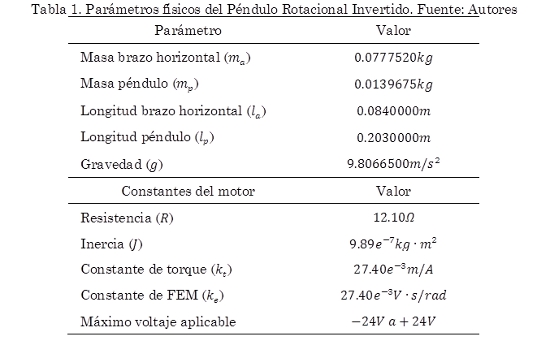
Con el modelo matemático linealizado alrededor del punto de equilibrio en la posición vertical superior y considerando los valores de los parámetros físicos de la planta que se observan en la Tabla 1, es posible encontrar una ganancia de realimentación que estabilice el sistema en la región de operación deseada, además de la determinación de la ganancia para seguimiento de referencia; es importante aclarar que la única variable que permite este seguimiento es la posición angular de la barra horizontal.
Los valores de los polos con los que se determinan las ganancias de realimentación en lazo cerrado de la planta fueron escogidos después de realizar pruebas en simulación, con el fin de garantizar una respuesta apropiada en función de las condiciones iniciales de la planta al ingresar en la zona de equilibrio. Los polos deseados del sistema en lazo cerrado determinan la velocidad de estabilización del péndulo y están dados por (10).

Así las ganancias de realimentación calculada mediante la metodología de Ackerman y de seguimiento están dadas por (11) y (12), respectivamente.


3.2 “Swing Up” mediante regulación de energía
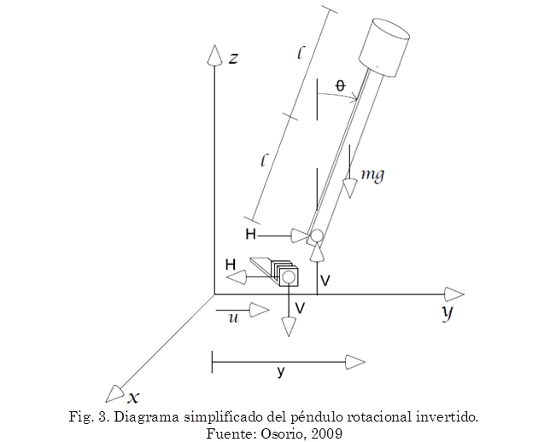
Considerando el modelo simplificado del péndulo de Furuta de la Fig. 3, se obtiene la función de movimiento simplificada de segundo orden (13), despreciando los torques de reacción ejercidos en el acople entre la barra horizontal y el péndulo y tomando como entrada la aceleración tangencial que imprime el motor a través de la barra (Osorio, 2009; Astrom & Furuta, 1996).

Para el cálculo de la función que representa los estados energéticos del modelo simplificado de la planta se considera la entrada como nula (u = o) y la posición de referencia como la posición vertical superior (θ = 0), así se obtiene (14).

Para evidenciar la influencia de la señal de control en la energía de la planta al diferenciar con respecto al tiempo se obtiene (15).

De (15) es claro que la aceleración influye directamente en la variación energética de la planta, es por esto que se define una posible señal de control empleando criterios de estabilidad de Lyapunov que permita regular la energía de sistema a una condición deseada, que como se definió es la posición vertical superior donde la energía para el modelo simplificado toma el valor de cero, como (16) (Osorio, 2009; Valenzuela & Nieto, 2012).

Donde k es un parámetro de diseño que depende de las características físicas del actuador, es decir, la máxima aceleración tangencial que puede que producir el motor, la función sign(x) representa el sentido con que se debe enviar la señal de control para favorecer el balanceo y aumentar las oscilaciones del péndulo a medida que transcurre el tiempo.
Finalmente utilizando la relación entre la aceleración tangencial de la barra en términos del torque y con ayuda de (7), es posible obtener una señal de control que define al voltaje aplicado en terminales del motor en función de los parámetros físicos de la planta y de sus posiciones y velocidades, como (17).

3.3 Redes Neuronales Artificiales (RNA)
Las redes neuronales son una herramienta de aprendizaje inteligente que se utiliza para emular el comportamiento de sistemas físicos en su mayoría con patrones de funcionamiento no lineal, a través de un conjunto previo de datos de entrenamiento que contienen las características o la información suficiente de la dinámica real del sistema físico bajo análisis (Shojaei et al., 2011).
Existen diferentes tipos de redes, su aplicación depende de las necesidades de cada sistema y del grado de fidelidad que se requiere con respecto al patrón de entrada. Así mismo también se cuenta con diferentes topologías para las redes neuronales artificiales, pero comúnmente se utilizan redes denominadas multicapa, dado que en la mayoría de los casos una sola neurona no es suficiente para resolver un problema.
El modelo equivalente de una RNA se obtiene a partir de las características de una red biológica, así una red artificial está constituida por un vector de entrada pi, una matriz de pesos Wi, un vector de ganancias bi y una función de transferencia que puede ser lineal o no dependiendo del problema que se desee solucionar (Acosta & Zuluaga, 2000).
3.4 Tipo de Red Neuronal Artificial implementada
Para el caso del péndulo de Furuta se utilizó el tipo de red conocido como Backpropagation, la cual tiene una regla de aprendizaje supervisado, esto quiere decir que la red debe conocer la salida que se desea obtener (Junfeng et al., 2008).
El algoritmo Backpropagation está compuesto por dos fases, la primera de propagación hacia adelante y la segunda de propagación hacia atrás. Así una vez se ha aplicado un estímulo a la entrada, ésta se propaga a través de todas las capas hasta generar una señal de salida. Dicha señal se compara con la salida deseada y se calcula una señal de error para cada componente de la salida total (Hagan et al., 1995).
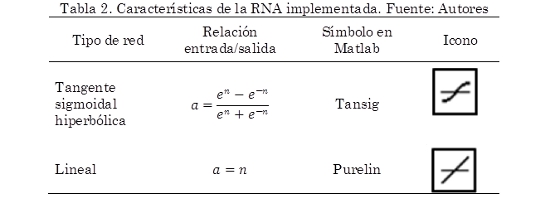
Una vez calculada dicha señal de error, ésta se propaga hacia atrás capa por capa hasta que todas las neuronas hayan recibido la señal de error que describe su aporte a la señal de error total. Basándose en la minimización del error medio cuadrático este algoritmo actualiza los valores de la matriz de pesos y del vector de ganancias, con el objetivo de que la red converja hacia un estado que le permita aprender los patrones de entrenamiento. La importancia de este proceso radica en que a medida que se entrena la red, las neuronas de la capa oculta aprenden a reconocer diferentes particularidades del espacio total de entrada, trayendo como consecuencia la capacidad de generalización. Esto significa que a pesar de que las entradas de la red no sean idénticas a los valores de entrenamiento, la red tiene la capacidad de cambiar al estado de activación (Vieira, 2010). En la Tabla 2 se presentan las características de la red neuronal artificial implementada, es decir, las funciones de transferencia empleadas y su representación en el software Matlab.
3.5 Entrenamiento de la Red Neuronal Artificial
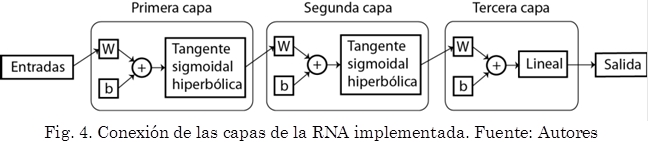
Se utilizó el comando de Matlab newff para crear una red Backpropagation. Esta herramienta requiere los datos de entrada, la salida deseada, el número de neuronas y la función de transferencia de cada capa. Así, las entradas pi son  . La red está conformada por 3 capas, cada una de ellas con 4, 8 y 1 neurona, respectivamente, y la función de transferencia para cada capa es tansig, tansig y purelin, como se muestra en la Fig. 4. Los valores iniciales de la matriz de pesos W y del vector de ganancias b, son escogidos aleatoriamente por el programa cuando se inicializa el entrenamiento.
. La red está conformada por 3 capas, cada una de ellas con 4, 8 y 1 neurona, respectivamente, y la función de transferencia para cada capa es tansig, tansig y purelin, como se muestra en la Fig. 4. Los valores iniciales de la matriz de pesos W y del vector de ganancias b, son escogidos aleatoriamente por el programa cuando se inicializa el entrenamiento.
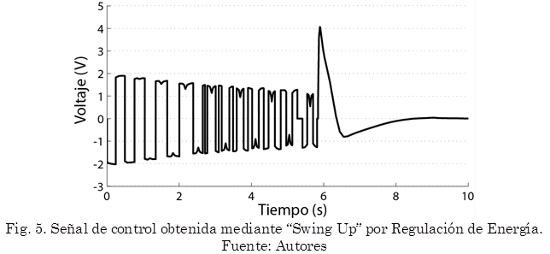
La RNA se entrenó con diferentes configuraciones, sin embargo se encontró que el esfuerzo computacional incrementaba a medida que la cantidad de neuronas por capa crecía y la salida obtenida no era adecuada. Es por esta razón que se seleccionó la red inicialmente descrita, ya que luego de entrenarla en repetidas ocasiones generó la salida deseada. Como se muestra en la Fig. 5, la salida que se desea que la RNA aprenda es la señal de control (voltaje) generada por el “Swing Up" por Regulación de Energía.
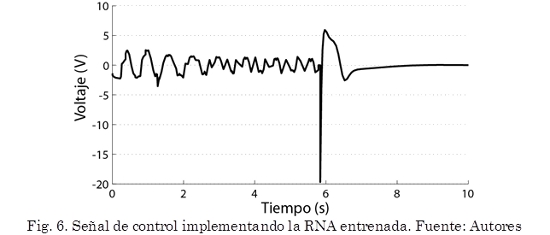
Así, después al finalizar el proceso de entrenamiento, Simulink genera un bloque que tiene una sola entrada y una sola salida, pero en su interior está inmersa toda la constitución inicialmente descrita. En la Fig. 6, se puede observar la señal obtenida luego de entrenar la RNA y comparando las Fig. 5 y Fig. 6, se puede apreciar lo mencionado con anterioridad, y es la capacidad de generalización de la RNA.
3.6 Estructura híbrida del controlador
El controlador híbrido desarrollado se fundamenta en la operación de las diferentes técnicas de control a partir de un esquema conmutado donde las redes neuronales artificiales operan en la región donde el control lineal no es adecuado, es decir, que son la ley de control encargada el balanceo de sistema hasta alcanzar regiones cercanas al punto de operación, en este punto se realiza la conmutación y opera el control por realimentación de variables de estado, para mantener estabilizado al sistema en su zona de operación. Se concibe como un control, debido a que se implementan dos técnicas de control diferentes para realizar una única tarea que es llevar el sistema péndulo de Furuta desde el punto de equilibrio estable (posición vertical inferior) hasta el punto de equilibrio inestable (posición vertical superior).
4. Resultados
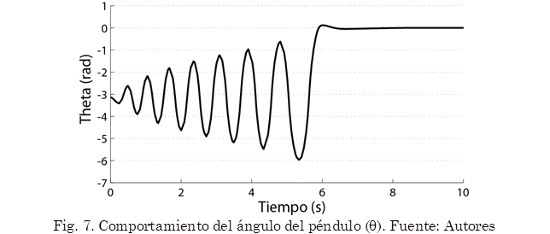
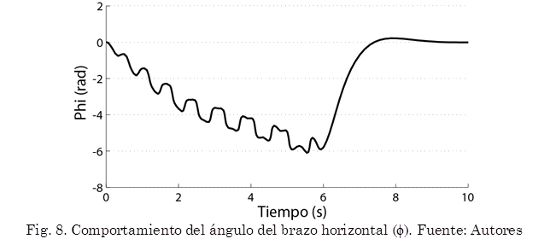
En esta sección se muestran los diferentes resultados obtenidos teniendo en cuenta perturbaciones en la señal de control, inclusión de ruido en el sensor del ángulo del péndulo y seguimiento de referencia. Al implementar el balanceo por Regulación de Energía, se obtienen los comportamientos de las variables de estado del sistema, en donde la Fig. 7 presenta el comportamiento del brazo pendular en función del tiempo y la Fig. 8 la variación en el tiempo de la posición angular asociada a la barra horizontal.
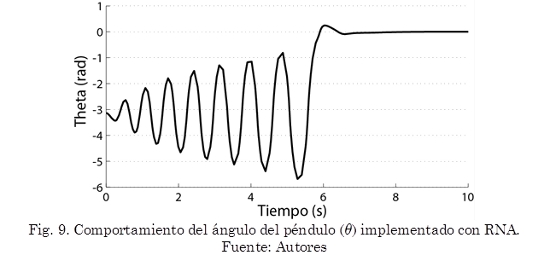
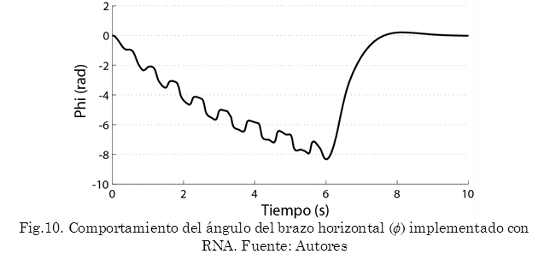
Una vez finalizado el proceso de entrenamiento de la RNA se implementó la señal de control que se mostró en la Fig. 6, se obtienen los resultados de la Fig. 9 y la Fig. 10 que representan el comportamiento en función del tiempo de la posición del péndulo y de la barra horizontal que lo sujeta, respectivamente.
4.1 Perturbación en la señal de control
Generalmente para probar la robustez en el diseño de controladores para sistemas físicos, es necesario inducir señales que perturben la dinámica normal de operación de la planta, lo cual se traduce en una alteración del comportamiento de estado estacionario de la misma y esto se logra a través de la perturbación de la señal de control o de ruidos en los elementos de medida.
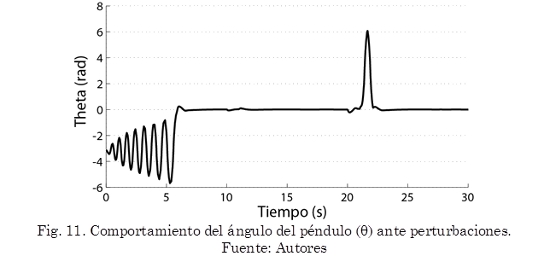
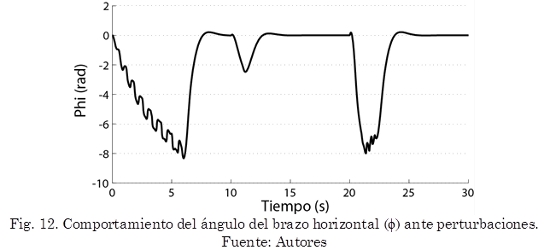
La Fig. 11 presenta dos perturbaciones típicas de la señal de control, debidamente espaciadas y de corta duración, que alteran la posición del péndulo. Al introducir la primera perturbación en un tiempo de 10 s y 4 V de amplitud, el comportamiento del ángulo del péndulo muestra variaciones alrededor de cero sin desestabilizar el sistema. Caso contrario ocurre con la segunda perturbación introducida en un tiempo de 20s con una amplitud de 12 V, ya que el péndulo sale del punto de operación. Sin embargo, en pocos segundos regresa de nuevo a la zona de operación.
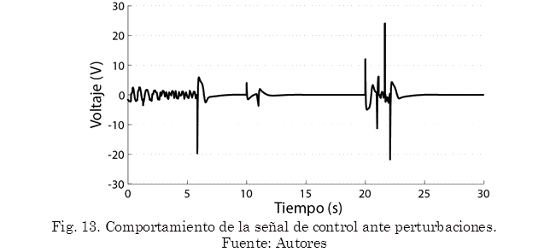
Los errores o alteraciones introducidas en la señal de control pueden apreciarse en la Fig. 13, representadas como esfuerzos de corta duración que el actuador debe realizar con la finalidad de mantener el péndulo en el punto de operación o llevarlo nuevamente a dicho punto una vez este haya salido de la zona de estabilidad.
4.2 Ruido introducido en el sensor del ángulo del péndulo
La operación de todo sistema físico está sujeta a la interferencia de señales externas conocidas comúnmente como ruido. Este tipo de señales posee un comportamiento de naturaleza aleatoria y se debe a que dependen en gran medida de las condiciones del medio en el cual se desarrolla el funcionamiento de una planta; razón por la cual el diseño de sistemas de control tiene en cuenta consideraciones de operación en las cuales se tiende a minimizar el efecto de las perturbaciones causadas por el ruido y ser altamente sensibles ante señales y patrones de entrada (Giraldo & Giraldo, 2009).
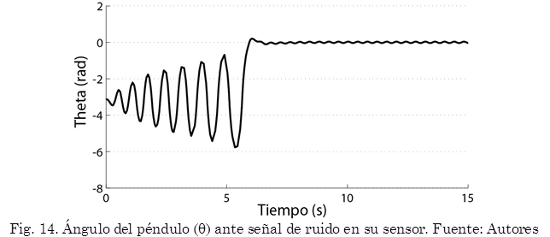
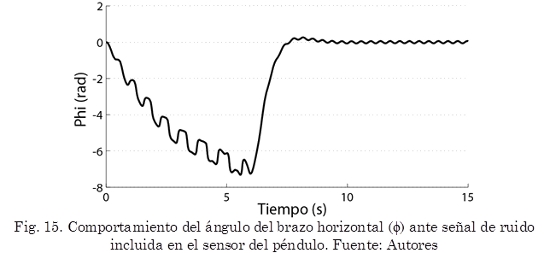
Se considera una señal de ruido externo que altera la correcta operación del sensor que toma las señales provenientes de la posición angular del péndulo, el análisis se realiza considerando una señal sinusoidal de baja frecuencia angular (5πrad/s) y con una magnitud de 2°.
Estas variaciones a frecuencia constante producen un rizado en la posición del péndulo como se observa en la Fig. 14, al igual que una pequeña variación alrededor de la posición de equilibrio de la barra horizontal como se muestra en la Fig. 15 y son el efecto de la compensación realizada por la señal de control para minimizar el efecto del ruido introducido en los elementos de medida.
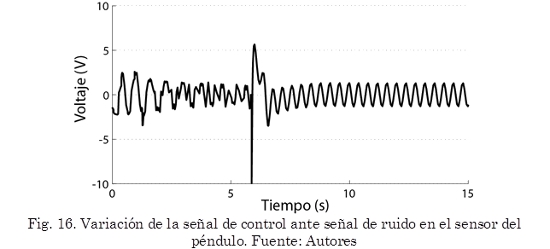
En la Fig. 16 se puede observar la señal de control que permite mantener estable el sistema ante condiciones erróneas de operación en los sensores del sistema, es posible ver la influencia que tiene este ruido en el esfuerzo del actuador de la planta.
4.3 Seguimiento de referencia
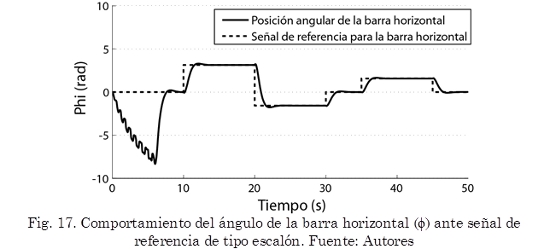
El seguimiento de referencia para señales dentro de un esquema de control de realimentación de variables de estado permite a algunas variables permanecer en un estado de operación de diferente de cero, en el caso del péndulo de Furuta la única variable que permite el seguimiento de señal de referencia, es la posición angular de la barra horizontal, con la ganancia mostrada en (15).
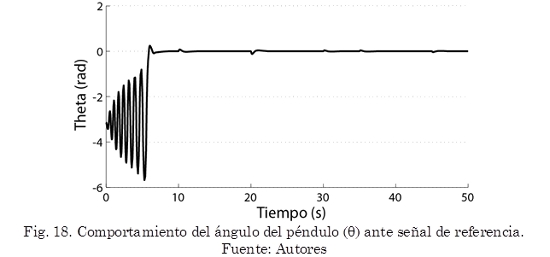
Una señal típica con la que se evalúa la capacidad de seguir una trayectoria es la señal de tipo escalón que se muestra en la Fig. 17 la cual es seguida por la posición angular de la barra horizontal con un pequeño retardo en alcanzar en el estado estable, lo que se da debido a que la prioridad del control es mantener al péndulo en la posición vertical superior sin mayores alteraciones alrededor de su zona de operación, tal como se observa en la Fig. 18.
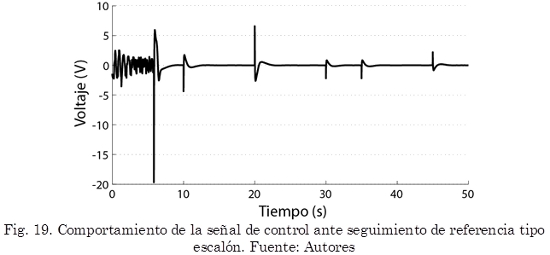
Finalmente en los momentos en los cuales la señal de referencia tiene un cambio, la señal de control reacciona inmediatamente para alcanzar dicha referencia al tiempo que regula las demás variables de estado para llevarlas a cero, comportamiento que es claramente observable en la Fig. 19.
5. Conclusiones
Los controladores basados en Realimentación de Variables de Estado muestran ser una buena técnica para lograr la respuesta deseada siempre que el sistema físico haya sido modelado de manera adecuada y dicho modelo se encuentre linealizado alrededor de un punto de operación definido.
Resulta más práctico plantear el modelo matemático de sistemas físicos no lineales utilizando funciones de energía que utilizando la mecánica clásica (ecuaciones de Newton), además las primeras permiten el conocimiento de los estados energéticos de la planta en todo momento, lo que garantiza generar señales con las cuales se puede regular dichos estados.
Las Redes Neuronales Artificiales resultan ser una herramienta útil para modelar sistemas no lineales. Sin embargo, la salida que se obtiene después de completar el proceso de aprendizaje depende de la constitución interna de la red y de las características del patrón de entrenamiento. El diseño de un controlador global depende de la naturaleza de la planta y generalmente suele ser complicado implementar una única técnica que posee la suficiente capacidad para arrojar los resultados esperados. Razón por la cual es más fácil y práctico emplear una combinación de controladores que actúen teniendo en cuenta los requerimientos de la planta y las regiones de operación de esta.
A pesar de que la señal de ruido introducida en el sensor del ángulo de péndulo ocasionará esfuerzos en la señal de control con la finalidad de mantener estable el sistema en el punto de equilibrio, dichos esfuerzos en ningún momento superan los límites operativos del actuador. Ante las perturbaciones introducidas en la señal de control el sistema respondió de manera adecuada demostrando así cierto grado de robustez en el controlador. Además al considerar señales de referencia se pudo apreciar la sensitividad de la planta ya que sigue este comando sin mayor dificultad.
Referencias
Acosta, M., Zuluaga, C., (2000). Tutorial Sobre Redes Neuronales Aplicadas en Ingeniería Eléctrica, Universidad Tecnológica de Pereira, Pereira, Colombia. [ Links ]
Astrom, K., Furuta, K., (1996). Energy Based Control of Pendulum, Conference on Control Applications, p. 6, Dearborn, Michigan, USA. [ Links ]
Cazzolato, B., Prime, Z. (2008). The dynamics of the furuta pendulum, Technical report, The University of Adelaide. [ Links ]
De la Torre, D., (2004). Control del Péndulo de Furuta, Tesis de Maestría, Centro de Investigación Científica y de Educación Superior de Ensenada, Ensenada, México. [ Links ]
Furuta, K., Yamakita, M., Kobayashi, S. (1992). Swing-up control of inverted pendulum using pseudo-state feedback, Journal of Systems and Control Engineering, 206(6), 263-269. [ Links ]
Giraldo, D., Giraldo, E., (2009). Teoría de Control Análogo, Universidad Tecnológica de Pereira, Pereira, Colombia. [ Links ]
Hagan, M., Demuth, H., Beale, M., (1995). Neural Network Design, PWS Publishing Company. [ Links ]
Ibargüen, F., Morales, J., Moreno, J., Cardona, J., Muñoz, P., (2009). Dinámica Hamiltoniana y control por planos deslizantes del péndulo de Furuta. Ingeniería y Desarrollo, vol. 26, p. 18. [ Links ]
Junfeng, W., Haiyan, S., Tengfei, Wu., (2008). ANN Control of Inverted Pendulum, First International Conference on Intelligent Networks and Intelligent Systems, IEEE. [ Links ]
Osorio, C., (2009). Diseño, Construcción y Control de un Péndulo Invertido Rotacional Utilizando Técnicas Lineales y no Lineales, Tesis de Maestría, Universidad Nacional de Colombia. [ Links ]
Rodríguez, O. O., Téllez, E. L., Gutiérrez D. A., (2012). Simulación del Péndulo Invertido Rotacional usando Easy Java Simulations y Matlab, Tecno Lógicas, 28, 15-32. [ Links ]
Shojaei, A. A., Othman, M. F., Rahmani, R., Rani, R., (2011). A Hybrid Control Scheme for a Rotational Inverted Pendulum, UKSim 5th European Symposium on Computer Modeling and Simulation, 83-87, Kuala Lumpur, Malaysia. [ Links ]
Valenzuela, J., Nieto, J., (2012). Control Local Utilizando Lógica Difusa del Péndulo Invertido con Rueda de Reacción, Tesis de Titulación, Facultad de Ingenierías, Programa de Ingeniería Eléctrica, Universidad Tecnológica de Pereira, Pereira, Colombia. [ Links ]
Valera, A., Vallés, M., Cardo, M., (2002). Desarrollo y Control de un Péndulo de Furuta, Dpto. Ingeniería de Sistemas y Automática, Universidad Politécnica de Valencia, Valencia, España. [ Links ]
Vieira, C., (2010). Realização de um Controlador utilizando Redes Neurais para o Controle de Estabilização do Pêndulo de Furuta, Faculdade de Tecnologia, Universidade Estadual do Amazonas, Manaus, Brasil. [ Links ]

