










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkTecnoLógicas
versão impressa ISSN 0123-7799versão On-line ISSN 2256-5337
TecnoL. vol.17 no.33 Medellín jul./dez. 2014
Artículo de investigación/Research article
Estimación de parámetros y modelo de caja negra de un motor CD sin escobillas
Estimation parameters and black box model of a brushless DC motor
José A. Becerra-Vargas1, Francisco E. Moreno-García2, Juan J. Quiroz-Omaña3, Deyanira Bautista-Arias4
1Magíster en controles industriales, Grupo de investigación de automatización y control, Departamento de Electrónica, Universidad Francisco de Paula Santander, Cúcuta-Colombia, josearmandobv@ufps.edu.co
2Doctor en ingeniería mecánica, Grupo de investigación de automatización y control, Departamento de Electrónica, Universidad Francisco de Paula Santander, Cúcuta-Colombia, femgarcia@ufps.edu.co
3Ingeniero electrónico, Grupo de investigación de automatización y control, Departamento de Electrónica, Universidad Francisco de Paula Santander, Cúcuta-Colombia, juanjoseqo@ufps.edu.co
4Ingeniero electrónico, Grupo de investigación de automatización y control, Departamento de Electrónica, Universidad Francisco de Paula Santander, Cúcuta-Colombia, deyanirabarias@gmail.com
Fecha de recepción: 10 de marzo de 2014 / Fecha de aceptación: 21 de mayo de 2014
Cómo citar / How to cite
J. A. Becerra-Vargas, F. E. Moreno-García, J. J. Quiroz-Omaña y D. Bautista-Arias, "Estimación de parámetros y modelo de caja negra de un motor CD sin escobillas", Tecno Lógicas, vol. 17, no. 33, pp. 55-64, 2014.
Resumen
El modelamiento de un proceso o una planta es de vital importancia para el diseño de su sistema de control, ya que permite predecir su dinámica y comportamiento ante diferentes circunstancias, entradas, perturbaciones y ruido. El objetivo principal de este trabajo es identificar qué modelo es mejor entre el matemático y el de caja negra para un motor específico de corriente continua sin escobillas de imanes permanentes. Para ello se presenta el modelo matemático de un motor de corriente continua sin escobillas PW16D del fabricante Golden Motor y se compara con su modelo de caja negra, ambos se obtienen a partir de datos experimentales. Dichos datos, el voltaje promedio aplicado y la velocidad angular, se adquieren mediante una tarjeta de adquisición y se importan al ordenador. Las constantes del modelo matemático se estiman mediante un ajuste de curvas basado en algoritmos de mínimos cuadrados no lineales y patrón de búsqueda mediante herramienta computacional. Para la estimación de constantes del modelo matemático mediante mínimos cuadrados no lineales y patrón de búsqueda se obtuvo una bondad de ajuste de 84,88% y 80,48% respectivamente. La bondad de ajuste obtenida por el modelo de caja negra fue de 87,72%. El modelo matemático presentó ligeramente menor bondad de ajuste, pero permite analizar el comportamiento de variables de interés como el consumo de corriente y el torque aplicado al motor. Debido a esto, se concluye que el modelo matemático obtenido mediante datos experimentales del motor sin escobillas PW16D es mejor que su modelo de caja negra.
Palabras clave: Identificación de parámetros, bondad de ajuste, motor CD sin escobillas, modelo de caja negra.
Abstract
The modeling of a process or a plant is vital for the design of its control system, since it allows predicting its dynamic and behavior under different circumstances, inputs, disturbances and noise. The main objective of this work is to identify which model is best for a permanent magnet brushless DC specific motor. For this, the mathematical model of a DC motor brushless PW16D, manufactured by Golden Motor, is presented and compared with its black box model; both are derived from experimental data. These data, the average applied voltage and the angular velocity, are acquired by a data acquisition card and imported to the computer. The constants of the mathematical model are estimated by a curve fitting algorithm based on non-linear least squares and pattern search using computational tool. To estimate the mathematical model constants by non-linear least square and search pattern, a goodness of fit of 84.88% and 80.48% respectively was obtained. The goodness of fit obtained by the black box model was 87.72%. The mathematical model presented slightly lower goodness of fit, but allowed to analyze the behavior of variables of interest such as the power consumption and the torque applied to the motor. Because of this, it is concluded that the mathematical model obtained by experimental data of the brushless motor PW16D, is better than its black box model.
Keywords: Identification of parameters, goodness of fit, brushless DC motor, black box model.
1. Introducción
Actualmente se desarrollan prototipos de vehículos eléctricos pequeños y de bajo costo como futura solución a los problemas de movilidad y contaminación ambiental presente en las grandes ciudades. Dichos vehículos usan principalmente motores sin escobillas por su alta eficiencia y nulo mantenimiento [1]. La producción más importante de motores eléctricos CD (corriente directa) sin escobillas es dada por las fábricas Chinas [2], estas proveen a casi todo el mundo, motores de bajo costo para vehículos pequeños. Sin embargo, estos requieren de controladores costosos. Al mismo tiempo, la poca información que ofrecen sobre los motores no permite desarrollar controladores de alto desempeño.
Diversas técnicas de modelamiento se han empleado para la obtención del modelo del motor sin escobillas. La medición de cada una de sus constantes mediante pruebas experimentales [3] fue usada por Ganesh y Mekideche [4] en un motor CD, identificación de los parámetros de un motor CD por métodos de distribución [5] usado por Sendrescu, identificación de parámetros por mínimos cuadrados no lineales y patrón de búsqueda de un motor sin escobillas empleada por Salah [6]. El modelamiento de caja negra con estructura ARX fue usado por Hussin [7].
Este artículo presenta la identificación de los parámetros del Motor PW16D de Golden Motor, entre los cuales se encuentran, las constantes de fuerza contra-electromotriz Ke, de torque Kt, de fricción viscosa B, de inercia del rotor J, su inductancia L y su resistencia R, usando algoritmos de mínimos cuadrados no lineales y patrón de búsqueda. Adicionalmente, se realiza un segundo modelo de caja negra basado en una función de transferencia de segundo orden y una estructura ARX. Para ambos modelos se comparan sus ventajas y desventajas.
Este artículo está organizado de la siguiente manera: en "Modelo Matemático" se describen las ecuaciones que rigen el comportamiento del motor, En "Adquisición de datos" se presenta el diseño del sensor y el esquema del sistema de adquisición, en "Estimación de parámetros" se realiza la estimación de las constantes de las ecuaciones diferenciales del motor a partir de los datos adquiridos, en "Función de transferencia" se realiza un segundo modelamiento de tipo caja negra con base en los datos adquiridos, en "Resultados experimentales" se presentan las simulaciones de los modelos obtenidos y finalmente en "Conclusiones" se discuten los resultados.
2. Modelo matemático
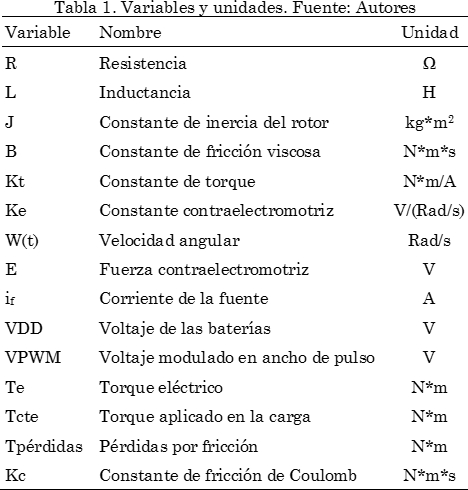
El motor CD sin escobillas conectado en estrella puede apreciarse en la Fig. 1. Según sea la posición del rotor, la cual puede ser determinada por los sensores de efecto Hall [8], se realiza una conmutación que activa una pareja de transistores por vez. El modelo del motor tiene una parte mecánica y una eléctrica [9], lo cual permite que sea analizado como un motor de corriente directa. En la Tabla 1 se muestran las abreviaturas de las variables usadas en el desarrollo de las ecuaciones así como sus unidades.
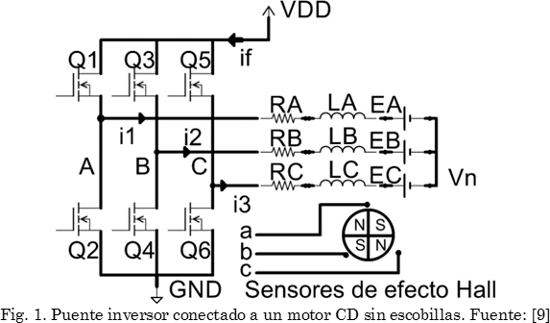
El motor funciona de a dos fases al tiempo, mientras un par de transistores están conduciendo, los otros cuatro están en circuito abierto. Por ejemplo, si Q1 y Q4 conducen, Q2, Q3, Q5 y Q6 no lo hacen, permitiendo que fluya la corriente de la batería (if) entre las fases A y B, dejando la fase C inactiva [10].
En la Fig. 2 se ilustra un estado de conducción de dos fases. Esto permite simplificar el sistema de ecuaciones [9].
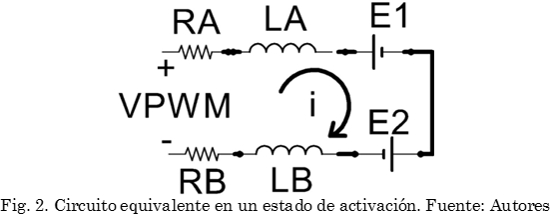
La ecuación de la malla para el estado de conducción A y B se puede apreciar en (1)

Donde E representa el voltaje contra electromotriz, definido en (2).

Reemplazando (2) en (1) y realizando las ecuaciones de malla para los otros dos estados de conducción se obtiene (3) el sistema de tres ecuaciones.
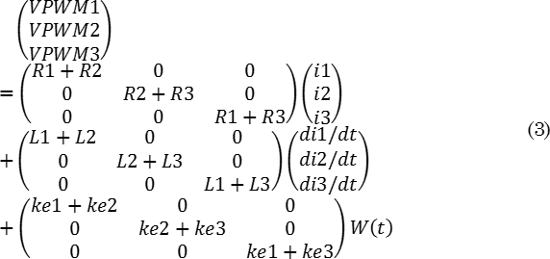
Por razones de simplicidad se usa sólo una corriente, if, que es la que se mide en la entrada del puente inversor y sólo se mide el voltaje VDD, que corresponde al voltaje de las baterías [9]. Así, sumando entre sí el sistema (3) se obtiene una única ecuación para el sistema eléctrico:
Reemplazando (4), (5), (6) en (3) se obtiene (7), que representa el modelo de un motor CD, por lo que en términos de simplicidad el modelo de un motor CD sin escobillas no difiere mucho al del motor CD convencional.




El torque eléctrico, producido por el campo magnético que a su vez es generado por las corrientes del embobinado del estator es proporcional a la corriente de fase como se aprecia en (8).

Como se aprecia en la Fig. 3, el torque eléctrico es equivalente a la inercia del rotor, el torque aplicado al rotor y las pérdidas por fricción. Refiérase a (9).
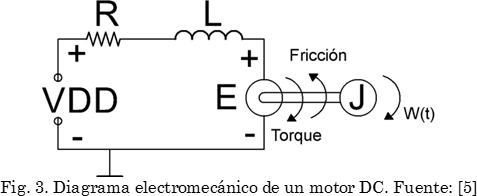

Donde las pérdidas por fricción [9] representan la fricción viscosa y la fricción de Coulomb como se indica en (10).

Reemplazando (10) en (9) se obtiene el modelo mecánico del motor CD, mostrado en (11).

Así, el modelo del motor CD sin escobillas está representado por (7) y (11).
3. Adquisición de datos
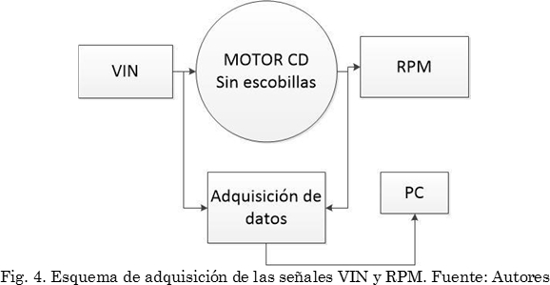
Los datos del motor fueron estimados a partir de la adquisición de dos señales, VIN y RPM, que son voltaje promedio aplicado y velocidad angular en revoluciones por minuto, tal como se aprecia en la Fig. 4. Para ello se implementó un variador de velocidad de control trapezoidal [11], [12] y se diseñó un sensor de velocidad angular.
El diseño del sensor está basado en un disco dentado, un codificador y un controlador de señal digital. En la Fig. 5 puede apreciarse el motor eléctrico, el cual está dentro de la llanta y el codificador.

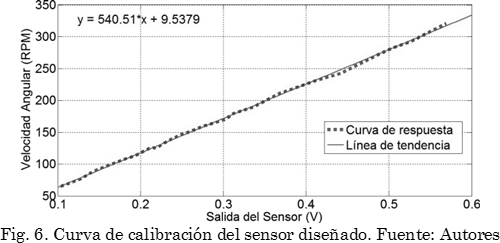
En la Fig. 6 se ilustra la curva de calibración del sensor, con una aproximación a una línea de tendencia lineal.
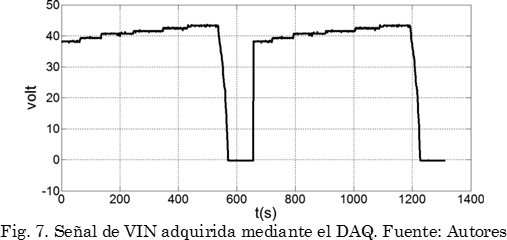
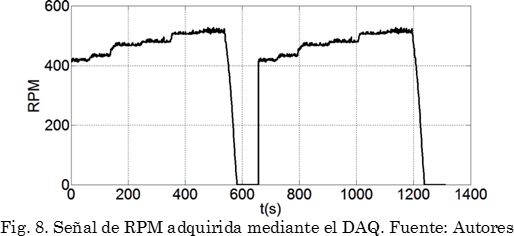
Los datos fueron adquiridos al ordenador mediante una tarjeta DAQ 6009 de National Instruments y posteriormente exportados a Matlab. En la Fig. 7 se muestra la señal adquirida de voltaje aplicado al motor, y en la Fig. 8 la respuesta del motor adquirida en de velocidad angular en revoluciones por minuto.
4. Estimación de parámetros
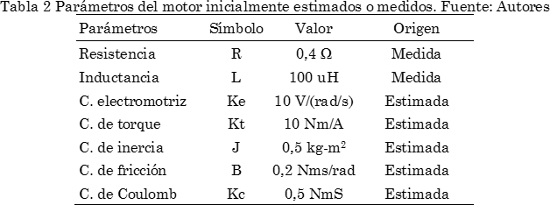
Encontrar las constantes de (7) y (11) del motor CD sin escobillas puede realizarse mediante pruebas experimentales [12] y medición de cada uno de sus parámetros [3] o también mediante estimación y optimización por software a partir de datos experimentales [13]-[15]. Se realizó este último mediante la herramienta computacional Simulink de Matlab. Una vez obtenidas las dos señales experimentales se realizó un estimado inicial de los parámetros del motor, como se aprecia en la Tabla 2. Esto debido a que para poder empezar a iterar, la herramienta de estimación de Simulink requiere que todos los valores a estimar tengan un valor inicial.
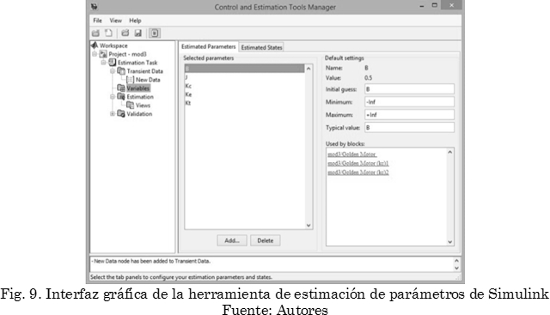
Los valores iniciales de las constantes a estimar pueden seleccionarse al ensayo y error y terminar de ajustarlas con esta herramienta. En la Fig. 9 se aprecia la interfaz de estimación de Simulink, donde se configuran valores mínimos y máximos posibles para cada constante.
5. Función de transferencia de caja negra
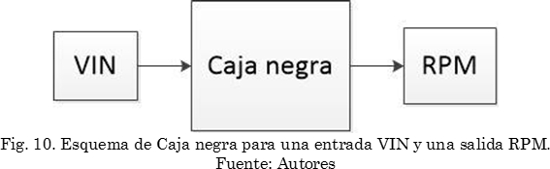
El modelamiento por caja negra consiste en un estudio de un elemento a partir de su comportamiento de salida para una entrada determinada sin abarcar en su funcionamiento interno [16]. El esquema se puede apreciar en la Fig. 10. Con la entrada y salida conocidas se identificó la función de transferencia de la caja negra mediante el comando IDENT de Matlab. El reconocimiento de la función de transferencia se realiza mediante una selección de método de identificación [7].
Se observaron mejores ajustes de curvas con estimaciones no lineales con estructuras ARX, pero también con una función de transferencia convencional, de un polo y dos ceros. El modelo ARX [17] tiene la estructura mostrada en (12).

Los parámetros na y nb son el orden del modelo y nk es el retardo. Donde y(t) es la salida en el tiempo t, na el número de polos, nb el número de ceros, nk es el número de muestras de entrada que se producen antes de que la entrada afecte la salida, también llamado tiempo muerto en el sistema; y(t-1)…y(t-na) son las salidas previas sobre el cual depende la salida actual; u(t-nk)…u(t-nk-nb+1) son las entradas anteriores y retardadas sobre el cual la salida actual depende; y finalmente e(t-1)…e(t-nc) representa el ruido blanco. Una manera más compacta de representar (11) es:

Donde q es el operador de retardo, A(q) y B(q) son específicamente:


6. Resultados
6.1 Estimación de parámetros
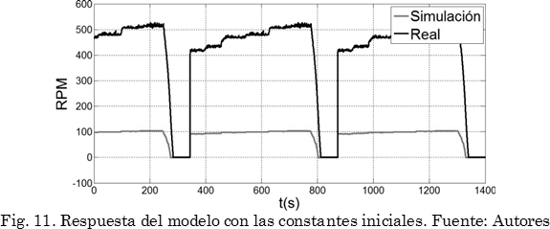
En la Fig. 11 puede apreciarse la respuesta en simulación del modelo de ecuaciones diferenciales con las constantes iniciales, puede verse que la respuesta no corresponde a la respuesta real del motor.
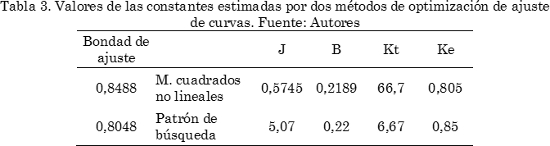
En la Tabla 3 se pueden apreciar dos estimaciones de las constantes mediante dos algoritmos de ajuste de curvas. Se aprecia una bondad de ajuste muy similar, pero resultados de las mismas variables diferentes. Para la bondad de ajuste se usó una función de costo llamada raíz del error cuadrático medio normalizado o por sus siglas en inglés NRMSE. Entre más cerca esté el valor a uno (1,0) indica mayor similitud entre la gráfica de referencia y la estimada.
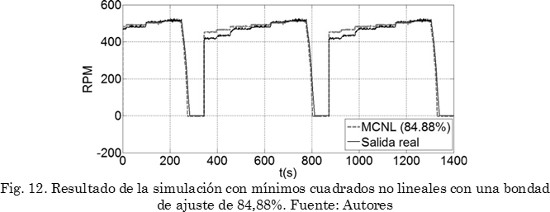
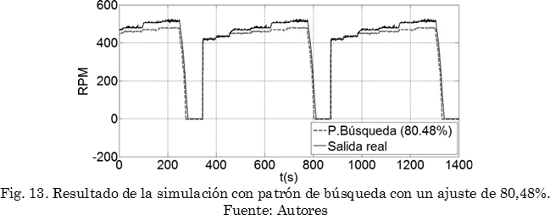
En la Fig. 12 se aprecia la respuesta del modelo matemático con las constantes estimadas mediante mínimos cuadrados no lineales mostradas en la Tabla 3, con una bondad de ajuste de 84,88%. En la Fig. 13 se aprecia la respuesta del modelo matemático con las constantes estimadas mediante patrón de búsqueda mostradas en la Tabla 3, con una bondad de ajuste de 80,48%. La respuesta del modelo por mínimos cuadrados no lineales obtuvo un mejor ajuste de curva, lo cual se también se puede apreciar gráficamente.
6.2 Función de transferencia caja negra
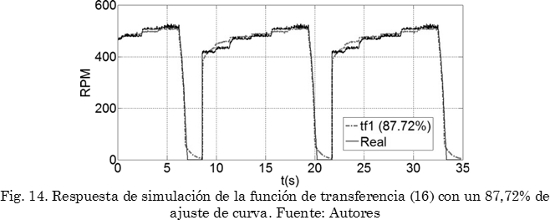
En la identificación de la función de transferencia se obtuvieron resultados satisfactorios o por encima del 80% de ajuste de curva con dos estructuras de modelo distintas: modelo de función de transferencia de un cero y dos polos, y modelo de estructura ARX. En la Fig. 14 puede apreciarse la similitud de la respuesta del modelo con el comportamiento real, cuya función está definida por (16).

En la Fig. 15 se observa la respuesta de simulación del modelo con estructura ARX con dos polos y un cero descrito en (17). Se observa que a pesar de tener menor bondad de ajuste de curva que el modelo (16), el modelo (17) presenta mejor comportamiento en los descensos, presentando mayor fidelidad con respecto al comportamiento real.
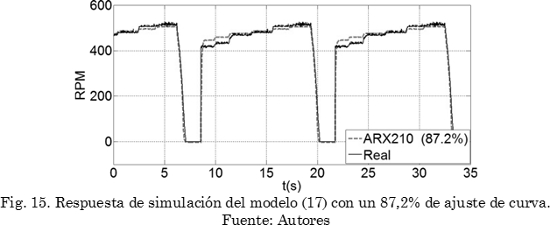

Donde:


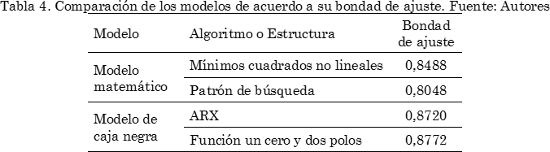
En la Tabla 4 se aprecia una comparación de los modelos obtenidos. Se aprecia que los modelos de caja negra obtuvieron una bondad de ajuste mayor.
7. Conclusiones
Para la identificación de parámetros y de la función de transferencia se cumple la relación proporcional entre cantidad de datos y calidad del ajuste, pero entre más datos, mayor cantidad de recursos consume el algoritmo, tardando más tiempo.
El modelo matemático con constantes estimadas por mínimos cuadrados presentó una bondad de ajuste de 84,88% contra 80,48% que presentó la estimación de las constantes por patrón de búsqueda para el mismo modelo. A pesar de sólo 4,4% de diferencia, puede apreciarse gráficamente una mayor fidelidad del primero que el segundo.
La identificación de la función de transferencia de caja negra, a través de la herramienta computacional IDENT de Matlab obtuvo ajustes de curva por encima del 80% sólo con estructuras ARX y modelo convencional de polos y ceros. El modelo ARX presentó una bondad de ajuste de curva de 87,2% frente al ajuste de 87,72% de un modelo convencional de dos polos y un cero. Sin embargo el modelo ARX presentó mayor fidelidad en los descensos, por lo que a pesar su menor bondad de ajuste, su comportamiento es más parecido al comportamiento real. Así, dicho modelo ARX es mejor que la función de transferencia convencional.
Los modelos de caja negra presentaron mayor bondad de ajuste de curva que los modelos matemáticos, debido a que el modelamiento por caja negra abarca muchas más variables que pueden interactuar en el motor que el modelo matemático.
A pesar de que los ajustes de curva fueron superiores en los modelos de caja negra, dichos modelos poseen la enorme desventaja de no poder realizar simulaciones de aplicaciones de carga al motor, así como observar el comportamiento de la corriente. Siendo por tanto, el modelo matemático con constantes estimadas a partir de datos experimentales mucho mejor en términos de estudio, simulación y optimización con control, ya que a pesar de tener 2,84% de menor bondad de ajuste, si permite aplicarle una señal de torque de carga al motor y observar el comportamiento de la corriente.
Las técnicas de modelamiento que se emplearon para el motor CD sin escobillas pueden aplicarse a motores CD con escobillas, sin necesidad de alterar la metodología, ya que poseen las mismas ecuaciones que lo modelan.
Referencias
[1] P. Yedamale, "Brushless DC (BLDC) Motor Fundamentals," 2003. [ Links ]
[2] K. Bradsher, "China Vies to Be Worlds Leader in Electric Cars," The New York Times, New York, NY, USA, 2009. [ Links ]
[3] C. Ganesh, B. Abhi, V. P. Anand, S. Aranvind, R. Nandhini, and S. K. Patnaik, "DC Position Control System -Determination of Parameters and Significance on System Dynamics," ACEEE Int. J. Electr. Power Eng., vol. 3, no. 1, pp. 1-5, 2012. [ Links ]
[4] M. Hadef and M.-R. Mekideche, "Moments and Paseks methods for parameter identification of a DC motor," J. Zhejiang Univ. Sci. C, vol. 12, no. 2, pp. 124-131, Feb. 2011. [ Links ]
[5] D. G. Sendrescu, "DC Motor Identification Based on Distributions Method," Ann. Univ. Craiova, vol. 9, no. 36, pp. 41-49, 2012. [ Links ]
[6] M. S. Z. Salah, "Parameters identification of a permanent magnet DC motor," The Islamic University of Gaza, 2009. [ Links ]
[7] M. S. Hussin, M. N. Azuwir, and Y. N. Zaiazmin, "Modeling and validation of brushless DC motor," in 2011 Fourth International Conference on Modeling, Simulation and Applied Optimization, 2011, pp. 1-4. [ Links ]
[8] M. Nikolic, J. Kovacevic, N. Pjevalica, I. Papp, and N. Milivojevic, "Real time FPGA implementation of brushless DC motor control using single current sensor," in 2013 IEEE 11th International Symposium on Intelligent Systems and Informatics (SISY), 2013, pp. 23-27. [ Links ]
[9] P. Dobra, "Robust PID controller of BLDC Motor via State Feedback Design," in The 11th Mediterranean Conference on Control and Automation, 2003. [ Links ]
[10] A. Purna, Y. P. Obulesh, and C. Sai, "Mathematical modeling of BLDC motor with closed loop speed control using PID controller under various loading conditions," ARPN J. Eng. Appl. Sci., vol. 7, no. 10, pp. 1321-1328, Oct. 2012. [ Links ]
[11] B. Akin and M. Bhardwaj, "Trapezoidal Control of BLDC Motors Using Hall Effect Sensors," 2010. [ Links ]
[12] H. K. Samitha Ransara and U. K. Madawala, "Modelling and analysis of a low cost Brushless DC motor drive," in 2013 IEEE International Conference on Industrial Technology (ICIT), 2013, pp. 356-361. [ Links ]
[13] A. A. Bature, M. Muhammad, and A. M. Abdullahi, "Parameter Identification of a Class of DC Motor," Int. J. Res. Eng. Sci., vol. 1, no. 5, pp. 69-72, Sep. 2013. [ Links ]
[14] J. A. Cortes-Romero, A. Luviano-Juarez, R. Alvarez-Salas, and H. Sira-Ramirez, "Fast identification and control of an uncertain Brushless DC motor using algebraic methods," in 12th IEEE International Power Electronics Congress, 2010, pp. 9-14. [ Links ]
[15] S. Udomsuk, K.-L. Areerak, K.-N. Areerak, and A. Srikaew, "Parameters identification of separately excited DC motor using adaptive tabu search technique," in 2010 International Conference on Advances in Energy Engineering, 2010, pp. 48-51. [ Links ]
[16] M. Hadef, A. Bourouina, and M. R. Mekideche, "Parameter Identification of a DC Motor via Moments Method," Iran. J. Electr. Comput. Eng., vol. 7, no. 2, pp. 159-163, 2008. [ Links ]
[17] L. Ljung, "Black-box models from input-output measurements," in IMTC 2001. Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference. Rediscovering Measurement in the Age of Informatics (Cat. No.01CH 37188), 2001, vol. 1, pp. 138-146. [ Links ]
[18] H. Peng, K. Nakano, and H. Shioya, "Nonlinear Predictive Control Using Neural Nets-Based Local Linearization ARX Model-Stability and Industrial Application," IEEE Trans. Control Syst. Technol., vol. 15, no. 1, pp. 130-143, Jan. 2007. [ Links ]
