











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares em
SciELO
Similares em
SciELO  Similares em Google
Similares em Google 
 Permalink
Permalink
1. INTRODUCCIÓN
La necesidad actual de disminuir la contaminación ambiental causada por los hidrocarburos ha impulsado el crecimiento en la investigación en diferentes áreas como los autos eléctricos [1], [2], [3], y las redes de generación de energías a partir de fuentes no convencionales [4]. Estas, a su vez, necesitan del desarrollo de otras tecnologías con el objetivo de mejorar sus propias necesidades, como lo son la autonomía, la confiabilidad y la reducción de costos de inversión y mantenimiento [5], [6].
Una de las tecnologías que más influye en el desarrollo de las necesidades en estas dos áreas son los sistemas de almacenamiento de energía (Energy Storage System - ESS), especialmente las baterías. Dentro de estas, las basadas en Ion-Litio son vistas como la tecnología más prometedora en este tipo de aplicaciones, debido a que poseen una alta densidad de potencia y energía, baja tasa de auto-descarga y un mayor número de ciclo de carga con respecto a las baterías basadas en plomo y níquel [7]. Sin embargo, las baterías son consideradas elementos críticos de operación debido al gran número de variables que aceleran su deterioro sin importar su tamaño, capacidad o tipo [8]. Este fenómeno de envejecimiento depende de las condiciones de almacenamiento y uso, dentro de las cuales intervienen variables como la temperatura [9], [10], las tasas de carga/descarga, la profundidad de descarga [8], las derivadas de corriente de carga [11] y el rizado en la corriente [2], [8], [12].
Este deterioro es típicamente medido por el índice de estado de salud (SOH por sus siglas en ingles), el cual mide porcentajes de variación de algunos parámetros de la batería indicando el grado de degradación [13], [14], [15]. El parámetro más utilizado para medir el SOH es la pérdida de capacidad de almacenamiento que ha sufrido la batería durante todo el tiempo de uso. Algunas de las variables que favorecen el deterioro de la batería pueden ser controladas por medio de dispositivos adicionales conocidos como sistema de gestión de batería (Battery Management System - BMS) [16], el cual mantiene las variables que intervienen en el proceso de carga/descarga dentro de los niveles de seguridad recomendados y además genera diagnósticos tempranos que evitan daños irreversibles en el proceso. Sin embargo, hay otras variables que no pueden ser controladas por el BMS, como es el caso del rizado de corriente presente en los dispositivos de potencia o convertidores conmutados usados comúnmente en los procesos de carga/ descarga de baterías [17], [18].
Una solución encontrada en la literatura para minimizar el rizado de conmutación es el uso de convertidores tipo elevador en configuración entrelazado [19], [20]. Este convertidor se caracteriza por la conexión en paralelo de dos convertidores elevadores, para el cual se pueden encontrar diferentes estrategias de control para su regulación de tensión y corriente. Otros autores, como en [21], proponen la conexión en paralelo de convertidores Buck con una relación maestro-esclavos, donde el maestro le impone las condiciones de corriente en estado estable a los esclavos conectados en paralelo, con el fin realizar una distribución de potencia que permita mantener la integridad de los convertidores y la demanda de potencia de la carga.
El maestro regula la tensión del bus, pero su corriente de salida no tiene un control, por lo que se producen sobre impulsos durante el transitorio. Este problema es solucionado con un control límite central que se encarga de controlar la corriente de cada rama en paralelo, prestando atención de que no sobrepasen la corriente de referencia límite central, la cual se define como la corriente de salida dividida el número de ramas. De esta manera, el sobre impulso de corriente a la salida se evita.
En este trabajo se presenta un diseño de la etapa de control digital para un convertidor elevador en configuración entrelazado, la cual permite despreciar el desbalance entre las ramas del convertidor y de este modo obtener el menor rizado posible. Adicionalmente, se presenta el diseño e implementación de la estrategia de control, la discretización del control y el convertidor entrelazado de dos ramas, el cual es comparado con el convertidor convencional elevador bidireccional utilizado en la carga y descarga de baterías [17], [18]. Posteriormente, se presenta la implementación de los dos controles y su comparación. En la sección final se presentan las conclusiones del trabajo.
2. PLANTEAMIENTO DEL PROBLEMA
Un convertidor entrelazado se caracteriza por tener dos convertidores conectados en paralelo conmutando a la misma frecuencia y con un cambio de fase entre las señales de control. Esta técnica tiene como resultado una disminución en el rizado de las formas de onda de entrada y salida y un menor contenido de armónicos [22]. Además, las pérdidas de conmutación y conducción, así como los niveles de interferencia electromagnética (EMI), disminuyen significativamente en el modo de operación entrelazado [23]. La cancelación resultante de armónicos de baja frecuencia permite, eventualmente, la reducción del tamaño y las pérdidas en las etapas de filtrado [22].
Se pueden encontrar en la literatura diferentes estrategias de control de un convertidor entrelazado. Los autores en [24], [25] presentan el diseño y simulación de un control PID para un convertidor entrelazado con dos ramas unidireccionales. Para este mismo convertidor, pero con tres ramas, los autores en [1] implementan un controlador PI para la regulación de una celda de combustible para un vehículo eléctrico. Otros autores, como en [26], han evaluado las ventajas de un convertidor entrelazado en el tiempo de vida de las celdas de combustible y el rendimiento de un control LQR sobre el convertidor. Los autores en [27] presentan una estrategia de control por modos deslizantes para la regulación del voltaje de salida del convertidor. La mayoría de estos trabajos recomiendan el uso de la misma señal de control para todas las ramas del convertidor con una simple modificación en la fase para cada una de las señales, calculada como 360/n, donde n representa el número de ramas del convertidor.
Esto lleva a necesitar un desfase de 180 % o 50 % y un ciclo útil de 50 % para un convertidor de 2 ramas, logrando una reducción de casi el 100 % para una razón entre los voltajes de entrada y salida igual a dos. Esta reducción no se cumple si se buscan relaciones de elevación diferentes al doble de la tensión de entrada; por ejemplo, elevar de 12 V a 48 V o de 12 V a 36 V, como puede darse en algunos rangos de operación de microrredes en DC con elementos almacenadores de 12 V de tensión nominal que requieren ser conectados a un bus de DC principal [28]. Además, debido al desbalance presente en las ramas del convertidor, producto de la tolerancia en los valores de los elementos, las pérdidas de conducción y el diseño del circuito impreso, se generan niveles DC y rizados diferentes en las corrientes de las ramas del convertidor, las cuales son también condiciones necesarias para la reducción del rizado en un convertidor entrelazado. Por lo tanto, debe efectuarse un diseño tanto de un convertidor que permita la reducción del rizado de corriente, como es el caso de la topología entrelazada, como un sistema de control que regule la tensión de salida a los niveles requeridos. Para llevar a cabo esta última labor en una topología entrelazada, se debe diseñar un controlador para cada rama y asegurar que tienen un desfase en su acción de control para asegurar la reducción del rizado en la corriente que fluye en la batería. En este trabajo se presenta el proceso de diseño de un controlador digital para un convertidor elevador entrelazado, cumpliendo con los criterios anteriormente expuestos.
3. SOLUCIÓN PROPUESTA
Uno de los convertidores más utilizados en el proceso de carga/descarga de una batería es el convertidor elevador, debido a su simplicidad y alto rango de conversión [17], [18], [20].
Este tipo de convertidor permite acoplar los niveles de tensión de la batería a los niveles de tensión del bus DC manteniendo este constante y controlando las perturbaciones presentadas debido a la conexión y desconexión de cargas y fuentes de energía. Sin embargo, el rizado de corriente generado en la conmutación es transferido a la batería, generando pérdidas de potencia y deterioro en la batería.
Como solución se ha utilizado una tipología conocida como intercalada, donde se conectan más de dos convertidores en paralelo y se desfasan las señales de conmutación con el objetivo de reducir el rizado en la corriente siguiendo (1), donde N representa el número de convertidores conectados.

La Figura 1 muestra un convertidor entrelazado, donde se puede observar que por cada una de las ramas circula solo una porción de la corriente total de la batería, lo cual disminuye las corrientes máximas que pasa por los inductores, lo que permite reducir los límites de la corriente de saturación del núcleo de las bobinas, el cual es uno de las características que aumenta el precio de las mismas.
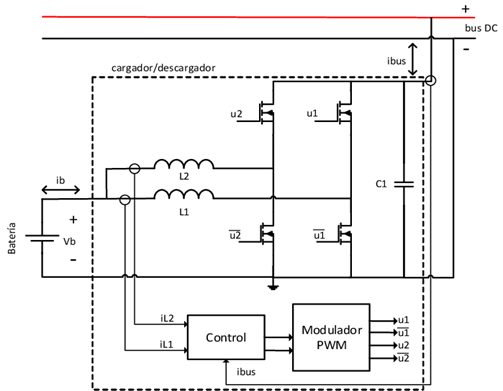
Las ecuaciones diferenciales (2), (3) y (4) representan las variaciones que sufren en el tiempo las variables de estado del convertidor (corrientes en la bobina i L1 , i L2 y voltaje en el capacitor de salida Vc), las cuales son encontradas utilizando el mismo método utilizado en el convertidor elevador descrito en [29].



A partir de estas ecuaciones se conforma el espacio de estado del sistema mostrado en (5), (6) y (7), las cuales representadas en su forma canónica X=AX ̇+BU:

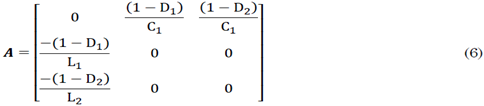
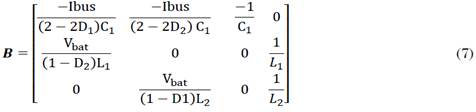
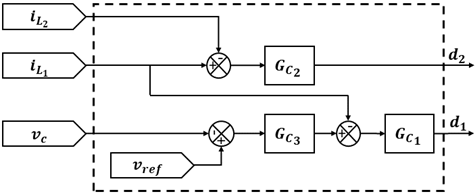
A partir de este espacio de estados es posible obtener 12 funciones de transferencia del sistema, de las cuales solo se usan las funciones de las variables a controlar. Para controlar el voltaje de bus y poder reducir el rizado de corriente en la batería se utiliza la estructura de control presentada en la Figura 2, donde se puede observar que es necesario medir las tres variables de estado del sistema.
Fuente: elaboración propia.
Figura 2 Diagrama de flujo del controlador PI para el convertidor elevador entrelazado
La estructura de control es seleccionada debido a que la función de transferencia del voltaje del bus DC con respecto a la entrada d 1 presenta un comportamiento de fase no mínima impidiendo un control directo del voltaje, por lo cual es necesario implementar un control en modo de corriente, comprendido por un control interno de corriente G c1 y un control de voltaje externo G c3. Una tercera estructura de control es utilizada para realizar una perfecta sincronización entre las corrientes de las dos ramas, la cual tiene la misma estructura de G c1 y es diseñada utilizando la función de transferencia i L2 /d 2 .
A partir de las ecuaciones de estado se encuentran los valores de los componentes siguiendo el procedimiento mostrado en [29], utilizando como parámetros de diseño los valores de rizados en la corriente en cada rama Δi r =0.2 A, rizado en el voltaje de Δv=0.1 V, voltaje en la batería V bat =12 V, voltaje en el bus DC V dc =24 V, corriente en el bus I bus =1 A, ciclos útiles D 1=0.5 y D 2 =0.5 y frecuencia de conmutación de 100 kHz, obteniendo valores de C 1= 44 uF y L 1,2=330 uF.
Para convertir el modelo al tiempo discreto se utiliza una transformación bilineal con una frecuencia de muestreo de 200 kHz para cumplir el teorema de muestreo de Nyquist-Shannon, obteniendo la función de transferencia de las dos corrientes del inductor expresada en (8) y la función del voltaje v c en función de la corriente i L2 expresada en (9).


A partir de estas tres funciones de transferencia se diseñan los controladores siguiendo el procedimiento descrito en [30], utilizando como criterios de diseño un factor de amortiguamiento de 0.707 y un tiempo de establecimiento inferior a 2 ms para el control de voltaje y 1 ms para el control de corriente. Debido a que el control de voltaje debe ser más lento que el control interno, se selecciona una frecuencia de corte de la quinta parte de la frecuencia de conmutación, la cual es fijada a 100 kHz/5= 20 kHz. La función de transferencia de los tres controladores diseñados se muestra en (10) y (11).


4. RESULTADOS Y DISCUSIÓN
Para la simulación e implementación del control digital se llevan las funciones de transferencia de control a ecuaciones en diferencias para una implementación en cualquier dispositivo programable. Este proceso consiste en realiza la transformada z inversa a (10) y (11), obteniendo de esta forma (12) - (15), donde e i y e v son el error de corriente y error de voltaje, respectivamente, expresadas mediante (13), (14) y (16), donde (n) indica la iteración actual y (n-1) una iteración anterior.





4.1 Simulación del control digital
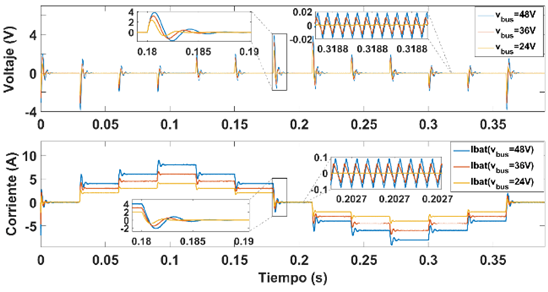
En la simulación se utilizan los mismos valores de los elementos utilizados en el proceso del diseño de control. Adicionalmente, el procedimiento de diseño se desarrolla para voltaje en el bus de 36 V y 48 V con el objetivo de validar la implementación del control con diferentes puntos de operación. Para obtener resultados similares a la implementación real, el control es implementado utilizando bloques de código en el lenguaje C y las ecuaciones en diferencias.
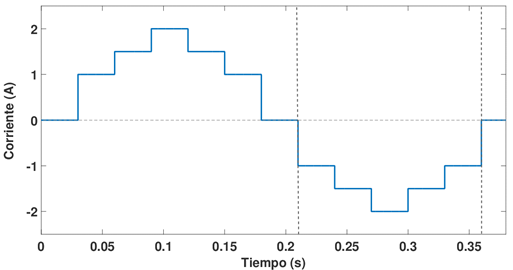
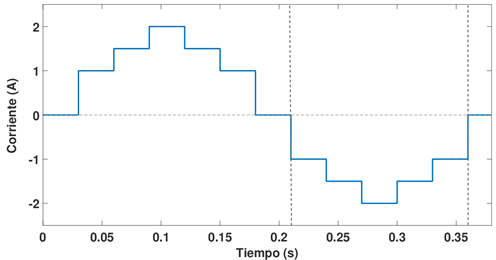
Para poder comprobar la respuesta del control frente a las perturbaciones, estas se aplican al sistema de escalones de corriente en el bus DC para simular el proceso de carga y descarga del convertidor, con perturbaciones de corrientes de 1 A, 1.5 A y 2 A tanto positivos como negativos con intervalos de 30 ms, como se muestra en la Figura 3.
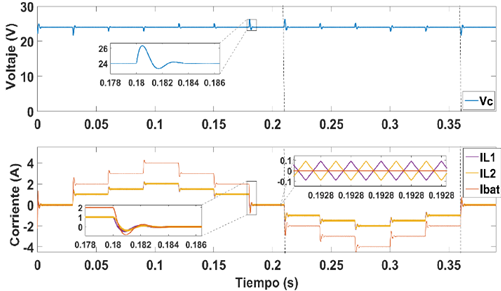
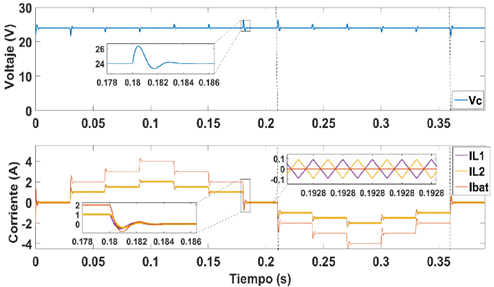
La Figura 4, muestra la respuesta del controlador para una referencia del voltaje del bus DC de 24 V, exactamente el doble del voltaje de la batería, donde se puede observar un correcto seguimiento de la corriente I L2 a su referencia I L1 . Adicionalmente, se observa una minimización en el rizado de corriente de la batería con respecto a un convertidor elevador convencional. Caso diferente se observa para la sintonización del control para referencias de voltaje en el bus de 36 V y 48 V, donde no se logra una minimización igual de la corriente como se puede ver en la Figura 5 comparado con la casi anulación de rizado lograda para la referencia de 24 V. Sin embargo, se puede observar que el control regula correctamente el voltaje dado por la referencia, y las corrientes de las dos ramas siguen perfectamente la referencia correspondiente. Adicionalmente, se observa una disminución en el rizado del voltaje del bus para las tres referencias, comparado con el resultado obtenido con el convertidor elevador.
Fuente: elaboración propia.
Figura 4 Respuesta del controlador PI para un convertidor elevador entrelazado con referencia de 24 V
4.2 Implementación del control digital
La implementación del control es desarrollada sobre el microcontrolador de 32 bits de Texas Instruments TMS320F28335 [31]. La Figura 6, presenta un esquema simplificado de los elementos más importantes del dispositivo utilizados en la implementación.
Fuente: elaboración propia.
Figura 6 Estructura simplificada de la arquitectura de la implementación del algoritmo de control sobre el microcontrolador TMS320F28335
El microcontrolador cuenta con un ADC de 12 bits con 16 canales de muestreo múltiple. Para esta implementación se utilizan 3 canales para muestrear i L1, i L2, y V c. Adicionalmente, el módulo ADC es configurado con un reloj de 25 MHz, por medio de los registros, lo que permite muestras cada 40 ns, las cuales son almacenadas en los registros de memoria destinados para cada uno de los canales del conversor (registros 0x70A8 a 0x70B7 en memoria).
El algoritmo de control comprende la programación de (12) a (16), las cuales incluyen el cálculo de los tres errores, la multiplicación de las constantes encontradas en el diseño y el almacenamiento de los cálculos e i1,2 (n-1), d 1,2 (n-1), ev(n-1) y i Lref (n-1) para su uso en las siguientes iteraciones del algoritmo de control. El resultado de este proceso es el cálculo de los ciclos útiles de cada una de las ramas, las cuales, por medio del módulo EPWM (por sus siglas en inglés, Enhance Pulse Width Modulator), generan las señales de control del convertidor.
Finalmente, los módulos ADC y EPWM se configuran para sincronizar el muestreo de las señales con el cambio en el flanco del PWM por medio del bloque SOC (por sus siglas en inglés- Start Of Conversion) del conversor análogo, de esta forma se realiza un muestreo del valor máximo y el valor mínimo del rizado como se puede observar en la Figura 7, con los cuales se calcula el valor promedio de la señal.
Fuente: elaboración propia.
Figura 7 Sincronización de los instantes de muestreo de las corrientes de las ramas con la señal PWM
Este proceso se realiza correctamente debido a los filtros anti-alising utilizados en la entrada de cada canal del ADC, los cuales son diseñados para una frecuencia de corte de 200 KHZ, el cual permite eliminar el ruido de alta frecuencia y evitar las deformaciones en la señal muestreada.
4.3 Plataforma experimental
El convertidor utilizado en las pruebas experimentales es diseñado para trabajar como un elevador convencional o en modo entrelazado, permitiendo de esta forma generar una comparación con los mismos parámetros como las pérdidas de conmutación, valores efectivos en los elementos, pérdidas de conducción en los elementos, pistas y soldaduras del circuito, las cuales pueden variar de una implementación a otra. Los parámetros del convertidor son presentados en la Tabla 1, el cual tiene una eficiencia de 88 % en las dos configuraciones de operación.
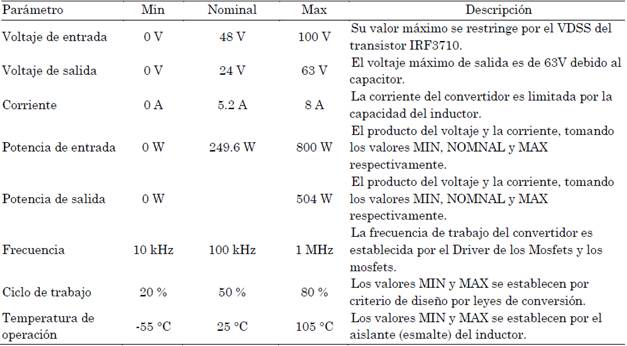
El dispositivo de carga/descarga utilizado está comprendido por dos convertidores elevadores en configuración entrelazado. El capacitor de salida tiene una capacitancia de 44 uF y los inductores tienen una inductancia de 330 uH con referencia 2318-V-RC. Los dispositivos de conmutación utilizados son MOSFET de referencia IRF3710 [32], cuya señal de conmutación proviene del control de voltaje y corriente implementado en el microcontrolador de 32 bits TMS320F28335 para cada una de las respectivas ramas del control, las cuales son previamente amplificadas por el driver HIP4081A [33].
Adicionalmente, por medio de resistencias shunt de 5 mΩ [33] y los sensores AD8210 es posible medir las corrientes del convertidor. Para este control se utilizan las medidas de corriente en el inductor de ambas ramas del convertidor y la medición del voltaje a la salida, la cual se realiza por medio de un divisor de voltaje e igualmente, realimentado a la tarjeta de control.
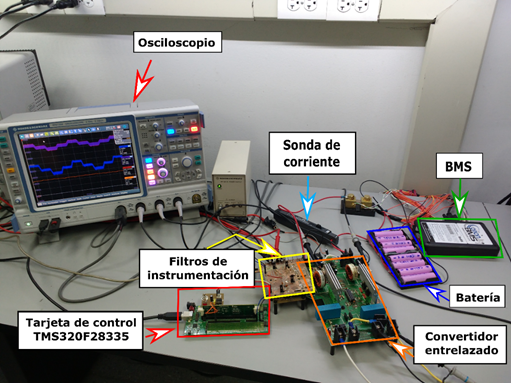
La Figura 8 muestra la plataforma utilizada, donde se han utilizado 8 baterías de Litio conectadas en una serie de 4 paralelos de dos celdas, configuración conocida como “4S2P”. Cada celda tiene un voltaje nominal de 3.6 V y una capacidad de 2.6 Ah, obteniendo de esta forma un pack completo de 14.6 V y una capacidad de 5.2 Ah.
Para la simulación de los cambios de demanda e inyección de energía, se conectan en paralelo la carga electrónica BK PRECISION 8601 y una fuente programable BK PRECISION XLN6024 con un diodo de protección. A partir de estos dos equipos se emulan tres posibles casos con transiciones entre cada uno de estos cada 50ms: i) (modo stand-by) no existe intercambio de potencia entre la batería y el bus DC, ii) (modo carga con 1 A desde el bus DC) existe exceso de energía y puede ser almacenada en la batería y iii) (modo descarga a 1 A desde el bus DC) hay déficit de energía y es necesario utilizar la energía almacenada en la batería.
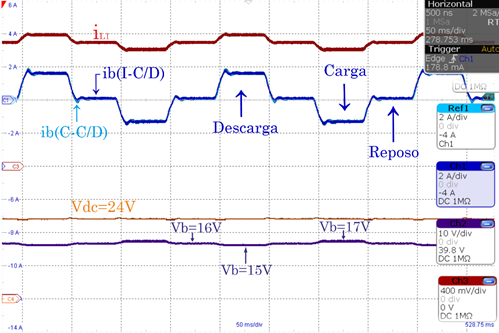
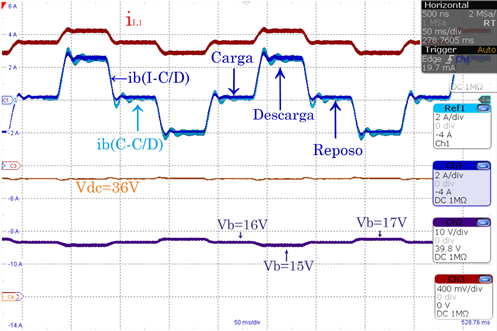
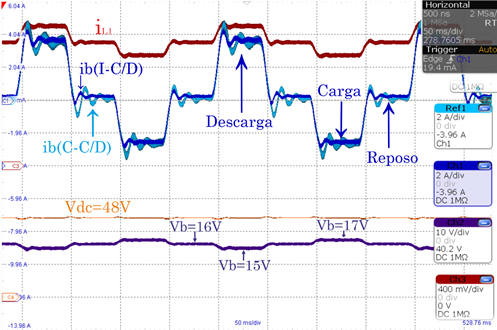
Las Figura 9, Figura 10 y Figura 11 presentan la respuesta del convertidor entrelazado para referencias de voltaje en el bus DC de 24 V, 36 V y 48 V, respectivamente. En las tres figuras se presentan (señal roja) la medición de la corriente del inductor i L1 por el sensor AD8210, (señal naranja) voltaje a la salida del convertidor, (señal morada) voltaje de la batería, (señal azul oscura) respuesta del convertidor entrelazado para el perfil de prueba, (señal azul clara) respuesta para el mismo perfil de un convertidor elevador convencional. Es de notar, que el sistema de control digital del convertidor elevador clásico es diseñado siguiendo el mismo procedimiento del convertidor entrelazado y los mismos parámetros de tiempo de establecimiento y sobreimpulso, con el fin de proporcionar una comparación equivalente tanto para el circuito como las estrategias de control.
Fuente: elaboración propia.
Figura 9 Comparación de las respuestas en corriente del convertidor entrelazado y un convertidor elevador convencional para una referencia de voltaje de 24 V
Fuente: elaboración propia.
Figura 10 Comparación de las respuestas en corriente del convertidor entrelazado y un convertidor elevador convencional para una referencia de voltaje de 36 V
Fuente: elaboración propia.
Figura 11 Comparación de las respuestas en corriente del convertidor entrelazado y un convertidor elevador convencional para una referencia de voltaje de 48 V
En las tres figuras se puede observar la regulación del voltaje del bus para los tres modos de operación, igualmente el uso del convertidor entrelazado presenta una disminución en el sobreimpulso de la corriente y un tiempo de establecimiento menor comparado con la respuesta del convertidor convencional.
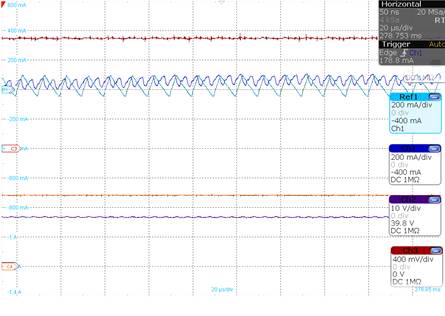
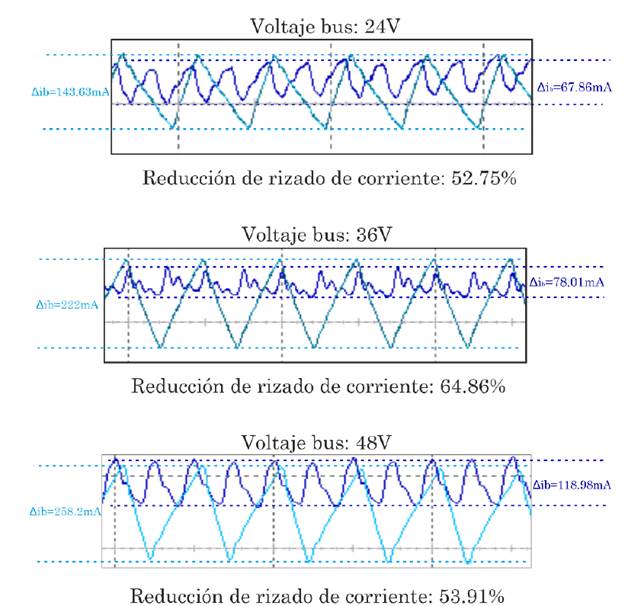
Adicionalmente, y como objetivo principal del convertidor entrelazado, se logra una disminución en el rizado de la corriente de la batería como se puede ver en la Figura 12 para una referencia de 24 V. En la Figura 13 se puede ver con mayor detalle la reducción de rizado para las tres referencias de voltaje, donde se puede observar que para un voltaje de referencia mayor el rizado de corriente aumenta. Igualmente, se observa que el rizado en el convertidor entrelazado (señal azul oscura) tiene un rizado mucho mayor que el presentado por el convertidor convencional, lo cual permite extender el tiempo de vida de la batería.
Fuente: elaboración propia.
Figura 12 Comparación del rizado de un convertidor elevador y un convertidor elevador entrelazado para una referencia de voltaje en el bus DC de 24 V
5. CONCLUSIONES
Este trabajo presentó el modelo y control de un convertidor bidireccional entrelazado, y su implementación como sistema de regulación de carga y descarga de baterías. Adicionalmente, se presentó una estrategia de control de la segunda rama de control que permite despreciar los problemas de desbalance presentes en la implementación de los convertidores debidos a las tolerancias en los componentes y diferencias en las resistencias parásitas en el diseño del circuito impreso del dispositivo electrónico.
Este sistema permite disminuir tanto el rizado de corriente en el dispositivo almacenador de energía como en el voltaje del bus DC, permitiendo de esta forma proteger la vida útil de la batería y de las fuentes y cargas conectadas al sistema.
Finalmente, se concluye que a pesar de que el sistema tiene una correcta regulación para los puntos de evaluación, es importante contar con un control de estructura variable que permita siempre obtener el mismo sobreimpulso, tiempo de establecimiento y el mínimo rizado posible para diferentes voltajes de referencia.

