











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
1. INTRODUCCIÓN
La captura de movimiento es uno de los métodos más utilizados en los estudios biomecánicos para la estimación de parámetros cinemáticos como trayectorias, posiciones, velocidades y aceleraciones [1]. Gracias a su excelente reproducibilidad y a la precisión de sus resultados, los sistemas de captura (MoCap, por sus siglas en inglés) compuestos de cámaras infrarrojas, de cámaras de video de alta velocidad y de marcadores reflectivos son denominados como el “gold estándar” [2].
En el mercado se han introducido otras opciones de sistemas de adquisición de datos biomecánicos, desarrollados con diferentes tecnologías tales como: los sensores inerciales [3] y tecnología sin marcadores (markerless) con Kinect [4], [5] u OpenPose [6]. Sin embargo, estos sistemas mantienen por el momento un alto grado de incertidumbre en sus datos, a comparación de los sistemas MoCap [7], [8].
Los análisis biomecánicos de movimientos altamente involucrados en la vida diaria son de especial interés para la comunidad científica debido a que permiten investigar el manejo de patologías neurológicas y ortopédicas relacionadas a la cotidianidad [9], [10].
En la literatura, se reportan diferentes estudios donde a través de análisis cinemáticos y dinámicos se genera información relevante para los profesionales de la salud con el objetivo de aumentar las detecciones tempranas de las patologías y así proveer diagnósticos y tratamientos acertados, especialmente en tiempo real [11]-[13].
El movimiento de squat consiste en un ejercicio de entrenamiento el cual siempre ha sido un tema de amplia investigación en el área de la biomecánica, debido a que es un ejercicio que involucra una gran participación de músculos de los miembros inferiores [14], [15]. En cuanto al entrenamiento y el acondicionamiento físico, todos los expertos coinciden en que el squat es el ejercicio físico más completo [16], [17]. Sin embargo, a pesar de la relevancia de este movimiento en diferentes actividades cotidianas, existen muchas diferencias entre formadores, kinesiólogos y personal médico en términos de investigación y análisis de las diferentes variables involucradas en su ejecución [18], [19].
A nivel técnico, los errores experimentales durante la adquisición de datos biomecánicos suelen estar relacionados con el ocultamiento de los marcadores durante la captura del movimiento. Este fenómeno es conocido como oclusión y puede causar problemas en la integridad de los datos y dar lugar a diagnósticos erróneos.
Existen diversas soluciones para mejorar la adquisición de datos y reducir la perdida de información por oclusión. Una de ellas es instalar más cámaras en los laboratorios de biomecánica. Sin embargo, el aumento del número de cámaras utilizadas supone un costo económico adicional para la adquisición de sistemas de captura de movimiento. Otra solución que suele implementarse para encontrar la posible información cinemática perdida son las técnicas de interpolación [20]. Sin embargo, estos métodos han perdido vigencia debido a que en algunos casos presentan una cuestionable precisión, siendo sustituidos por métodos computacionales más potentes y precisos [2], [21].
Es así como en años recientes se han implementado diferentes técnicas computacionales para verificar y examinar la información registrada en las capturas biomecánicas [9], [22]-[23]. Estos métodos computacionales suelen usarse para la estimación de posturas biomecánicas, en la predicción de amplitudes y momentos articulares, entre otras [24], [25]-[30].
Entre los diferentes métodos computacionales que existen, la inteligencia artificial destaca por su potencial y fácil implementación para clasificar, predecir y evaluar nuevos datos en diferentes ámbitos y condiciones [25], [31]. El aprendizaje profundo, o deep learning, también se ha aplicado al campo de la biomecánica para generar herramientas que apoyen a los análisis e identificación de patologías.
En el estudio presentado en [28] se hace uso de una estructura de red neuronal convolucional (CCN) que, debido a su alta complejidad en el procesamiento de imágenes, ofrece tasas de exactitud altas en sistemas 3D. Adicionalmente, en el trabajo [29] se reporta una primera implementación de un método para estimar variables cinemáticas con redes neuronales durante el uso del dispositivo Five Minute Shaper (FMS), con valores de RMSE cercanos a 3° en un modo de adquisición de solo dos dimensiones. En el estudio [5] se implementan redes neuronales basadas en Long Short-Term Memory (LSTM) para el análisis de marcha en diez pacientes menores con parálisis, donde los valores RMSE estuvieron entre 5.2° y 11.2°, con CC entre 0 y 0.7.
Finalmente se reporta el uso de máquinas de soporte vectorial (SVM), las cuales han sido utilizadas en el campo de la biomecánica en su mayoría para la clasificación de alteraciones y patologías [32], [33], pero no para la predicción de estas.
Hasta donde se ha podido identificar, existe en la actualidad un gran interés en la investigación en el área de la biomecánica sobre el desarrollo e implementación de nuevas técnicas computacionales para mejorar la adquisición de parámetros cinemáticos. Este estudio tiene como objetivo estimar la amplitud articular de miembros inferiores (pierna derecha e izquierda) durante el movimiento de squat a partir de la información cinemática obtenida en un solo eje del sistema de referencia y antropométrica de veinte voluntarios, utilizando para ello técnicas de aprendizaje supervisado, tales como la red neuronal perceptrón multicapa y la regresión de vectores de soporte (RVS). A partir de los resultados obtenidos se puede afirmar que esta herramienta permite una estimación de los valores de amplitud articular aproximados a los reales que, en estudios futuros, tendría aplicaciones en la reducción de recursos físicos, la disminución de la oclusión al necesitar solo la información de un eje específico y la adquisición de información biomecánica sin requerir un entorno controlado.
2. METODOLOGÍA
2.1 Diseño experimental
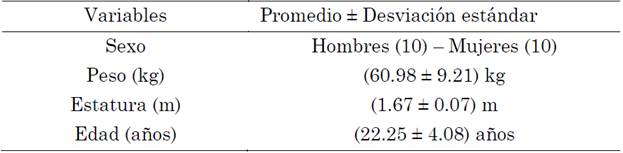
En este estudio, veinte jóvenes voluntarios (diez hombres y diez mujeres), sin acondicionamiento físico y sin ninguna patología que afectara el movimiento, fueron grabados mientras realizaban el ejercicio de squat. En la Tabla 1 se puede observar el promedio de los datos antropométricos de los sujetos que participaron de las pruebas.
Cada uno de los voluntarios firmó un consentimiento informado de acuerdo con las recomendaciones establecidas en la declaración de Helsinki. Antes del ejercicio, el sujeto fue instruido acerca de la ejecución correcta del movimiento; posteriormente, durante el ejercicio, se le solicitó al sujeto de pruebas que realizara el ejercicio de forma repetida buscando obtener un movimiento natural [34].
Teniendo en cuenta la complejidad del squat y la necesidad inicial de una adecuada resolución y baja incertidumbre, para la toma de muestras de video se utilizaron dos cámaras de alta velocidad Basler AG scA640-70gc con frecuencia de muestreo de 70 cuadros por segundo y, para la digitalización de los videos, los softwares Maxtraq 2D y 3D (Laboratorio de Biomecánica, Universidad Antonio Nariño). Este sistema permite identificar la posición de marcadores reflectantes respecto al tiempo. En la construcción del modelo se utiliza el software de libre acceso Mokka Biomechanics, el cual permite la exportación de los datos de posición y trayectoria de cada marcador. Finalmente, todo el análisis se realiza en el software Matlab R2020a (Campus License Universidad Antonio Nariño).
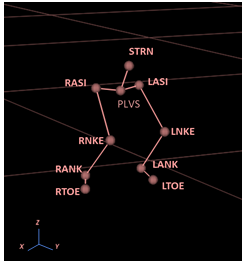
Para el registro se utilizaron diez marcadores pasivos (ver Figura 1), que fueron ubicados en posiciones articulares y etiquetados siguiendo las recomendaciones de la International Society of Biomechanics (ISB) [35]: en la cadera, RASI y LASI; en las rodillas, RKNE y LKNE; en los tobillos, RANK y LANK; en los pies, RTOE y LTOE; en la pelvis, PLVS; y, por último, cerca al centro de gravedad, STRN. Además, se utiliza la denominación R para derecha y L para izquierda.
2.2 Procesamiento de las señales
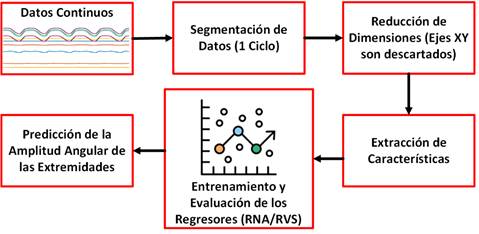
Según el diseño experimental, los datos continuos se segmentaron en un ciclo por persona cuando el sujeto ejecutaba el movimiento de forma natural. Las posiciones de los marcadores se almacenan como señales en una matriz de Mx30. M representa el número de muestras o ejemplos adquiridos y las columnas corresponde a las posiciones XYZ de los diez marcadores.
En este trabajo fueron utilizadas 3184 muestras. La varianza fue calculada para cada eje (ver Tabla 2). Se puede observar en los resultados de la varianza calculada, que el eje que contiene más movimiento de marcadores o mayor varianza matemática corresponde al eje Z.
Tabla 2 Promedio general de varianzas calculadas por cada eje para todos los sujetos

Fuente: elaboración propia.
Así, la información de los ejes XY fue descartada. Teniendo en cuenta lo anterior, las características utilizadas como entrada de los métodos computacionales corresponde a la diferencia de la posición relativa entre cada uno de los marcadores y un marcador de referencia para cada extremidad correspondiente a los marcadores más estáticos (de menor varianza), para este caso los marcadores de referencia fueron RTOE y LTOE.
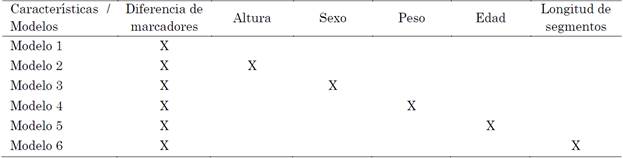
El Modelo 1 fue entrenado y evaluado sólo con características extraídas de los marcadores. No obstante, según la literatura, los parámetros antropométricos tienen influencia en la ejecución de movimientos, por lo que es importante tenerlos en cuenta en el desarrollo de un análisis biomecánico [32], [36]. Según lo anterior, los modelos 2 al 6 fueron complementados con los datos antropométricos: peso, sexo, estatura, edad y longitud de los segmentos calculados a través de tablas antropométricas estándar, donde se define la longitud del muslo en aproximadamente 20 % de la estatura y la pantorrilla en 28.5 % [37] (ver Tabla 3).
Tabla 3 Características utilizadas para entrenar y evaluar los diferentes modelos de RNA y RVS
Fuente: elaboración propia.
La salida del algoritmo supervisado corresponde al ángulo de amplitud articular de la rodilla, que es comúnmente calculado a través de las posiciones XYZ de los marcadores RASI, RNKE y RANK para pierna derecha, y LASI, LNKE y LANK para pierna izquierda. Estas amplitudes angulares se cuantificaron usando (1).
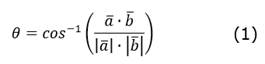
Donde θ corresponde al ángulo de amplitud de la pierna derecha o izquierda, a es el vector formado entre RASI y RNKE para pierna derecha, y LASI y LNKE para pierna izquierda.
Por último, b es el vector formado entre RNKE y RANK para pierna derecha, y LKNE y LANK para pierna izquierda.
2.3 Red neuronal perceptrón multicapa
Las características de entrada procesadas fueron ingresadas a una red neuronal Feed-forward de tres capas cuyo esquema es mostrado en la Figura 2. Para el entrenamiento de la red se utilizó el algoritmo Levenberg-Marquardt debido a que el algoritmo de gradiente descendiente puede caer en un óptimo local y las salidas de la red pueden no converger hacia los objetivos. Todos los resultados estimados por el modelo propuesto se han realizado utilizando validación cruzada k-fold con cinco folds, donde la red fue entrenada con el 70 % de los datos y evaluada con el 30 %. Se seleccionó la función sigmoide como función de transferencia de la red desde la capa de entradas hasta las capas ocultas [26]. La capa de salida corresponde a la estimación del ángulo de amplitud de la extremidad. Se evaluaron diez estructuras de redes neuronales con diferente número de iteraciones y configuraciones con el objetivo de elegir una red neuronal óptima para este estudio y evitar el sobreajuste.
Fuente: elaboración propia.
Figura 2 Diagrama de bloques del procesamiento de señales, extracción de características, entrenamiento y evaluación de la RNA y el RVS para la predicción de la amplitud de los ángulos de las extremidades
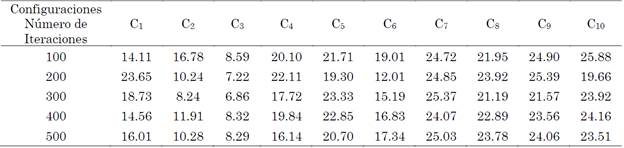
Para ello, fue realizado un estudio previo donde solo se usaron los datos de entrada correspondientes a las variables biomecánicas (Modelo 1) y una salida correspondiente al ángulo de pierna izquierda. Las diferentes configuraciones fueron: tres configuraciones con una capa oculta de 2, 5 y 10 neuronas (C1-C3), tres configuraciones con dos capas ocultas: 5x5, 10x5 y 5x10, respectivamente (C4-C6), y cuatro configuraciones con tres capas ocultas: 5x5x5, 10x5x5, 5x10x5 y 5x5x10, respectivamente (C7-C10). Las diferentes estructuras se compararon y evaluaron mediante la métrica RMSE presentada en (2).
2.4 Regresión de vectores de soporte (RVS)
La regresión de vectores de soporte (RVS) es una variante del clasificador de máquina de vectores de soporte (SVM), utilizado como esquema de regresión para predecir valores [32], [33]. Para este caso, las características procesadas fueron los valores de entrada de la RVS (Tabla 3). La RVS se implementó usando un kernel de tipo lineal a través de la función fitrsvm de Matlab. Todos los resultados estimados por el modelo propuesto se han realizado utilizando validación cruzada k-fold con cinco folds, donde la RVS fue entrenada con el 70 % de los datos y evaluada con el 30 %.
2.5 Métricas
La raíz del error cuadrático medio (RMSE, por sus siglas en inglés) mide la cantidad de error que hay entre dos conjuntos de datos, y el coeficiente de correlación de Pearson (CC) es una medida de regresión que pretende cuantificar el grado de variación conjunta entre dos variables. El RMSE y el CC son variables ampliamente utilizadas en estimación biomecánica y técnicas de regresión [4], [5], [29]. Una estimación se considera adecuada cuando el valor de RMSE es bajo y el valor de CC es cercano a (1). En (2) y (3) se definen las métricas.
Donde  es el ángulo de amplitud estimado, θ
i
es el ángulo de amplitud verdadero de la muestra i, y N es la longitud de los datos de la amplitud del ángulo. Para este estudio, después de realizar el entrenamiento de los modelos de regresión con el 70 %, se hace la predicción de los modelos con el otro 30 %, donde el RMSE y el CC es calculado para la evaluación de la generalización de los métodos. El procedimiento, se repite a través de la validación cruzada k-fold.
es el ángulo de amplitud estimado, θ
i
es el ángulo de amplitud verdadero de la muestra i, y N es la longitud de los datos de la amplitud del ángulo. Para este estudio, después de realizar el entrenamiento de los modelos de regresión con el 70 %, se hace la predicción de los modelos con el otro 30 %, donde el RMSE y el CC es calculado para la evaluación de la generalización de los métodos. El procedimiento, se repite a través de la validación cruzada k-fold.
2.6 Análisis estadísticos
El análisis estadístico permite determinar si la amplitud angular estimada por la red neuronal, a pesar de su error, es similar con la amplitud angular real calculada a través de (1). En primer lugar, se realizó un análisis de Kolmogórov-Smirnov para confirmar que el comportamiento de las amplitudes articulares tienen alta probabilidad de tener una distribución normal. Posteriormente, se realizó una prueba de Kolmogórov-Smirnov de dos muestras. La hipótesis nula corresponde a que los ángulos de amplitud estimados y los ángulos de amplitud verdaderos siguen la misma distribución continua. Por otra parte, la hipótesis alternativa es que siguen distribuciones continuas diferentes. El criterio para el análisis significativo fue un valor p de 0.05.
Asimismo, teniendo en cuenta las múltiples hipótesis que hay por cada modelo evaluado, se implementó un análisis de varianza (ANOVA) con un ajuste del valor p con prueba de Bonferroni, con el objetivo de determinar si la diferencia de medias entre el valor real y los modelos de estimación son significativamente diferentes (p < 0.05).
3. RESULTADOS
En la Tabla 4 se puede observar el RMSE para las diferentes configuraciones de la RNA utilizando características biomecánicas y el ángulo de amplitud de pierna izquierda. Con esta información es posible elegir una configuración adecuada para este estudio. Se seleccionó la C 3 (1 capa oculta con 10 neuronas) con 300 iteraciones para realizar el análisis, debido a que esta configuración tuvo menos error que las demás.
Tabla 4 RMSE para las diferentes configuraciones de la RNA utilizando características biomecánicas y el ángulo de menor amplitud.
Fuente: elaboración propia.
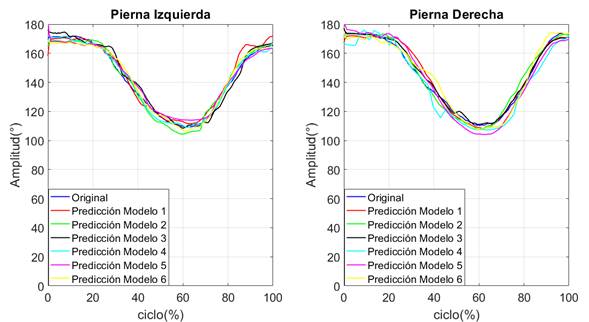
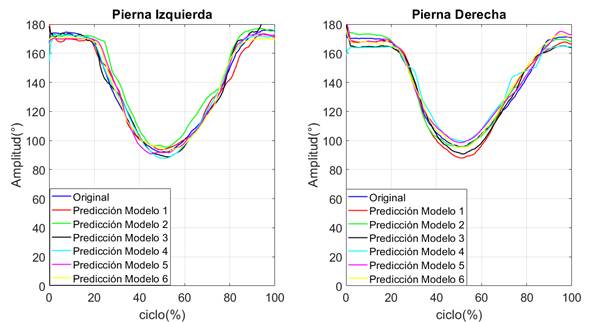
Las Figuras 3 y 4 muestran los resultados de la estimación de los ángulos de la pierna izquierda y derecha de dos sujetos (mujer y hombre) que realizaron el squat. Estos ángulos fueron estimados por la RNA. En estas gráficas, la línea azul representa los ángulos originales, la línea roja indica el ángulo estimado por el modelo 1 de la RNA, y así sucesivamente como se indica en las leyendas de las figuras.
Fuente: elaboración propia.
Figura 3 Ángulo de amplitud experimental real de la pierna izquierda y derecha versus el ángulo estimado por la RNA de cada modelo para un sujeto femenino durante el squat.
Fuente: elaboración propia.
Figura 4 Ángulo de amplitud experimental real de la pierna izquierda y derecha versus el ángulo estimado por la RNA de cada modelo para un sujeto masculino durante el squat
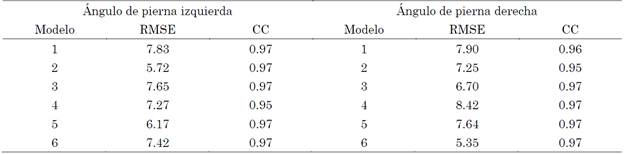
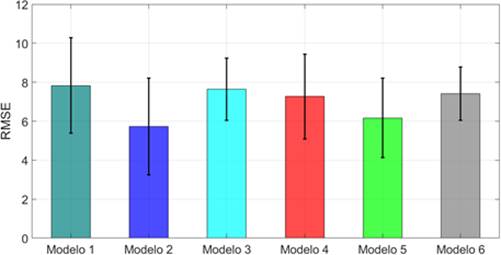
Las Figuras 3 y 4 indican que los ángulos estimados, utilizando los diferentes modelos de RNA, son similares al ángulo original durante la realización del squat. Estos hechos también se pueden comprobar en la Tabla 5 y en la Figura 5 y 6 que muestran la métrica RMSE calculada a través de (2). Por otro lado, la Tabla 5 muestra el CC calculado a través de (3) para todos los modelos de estimación entrenados.
Tabla 5 Métricas estimadas de RMSE y CC para los seis modelos de RNA utilizados para predecir los ángulos de las extremidades durante el Squat.
Fuente: elaboración propia.
Fuente: elaboración propia.
Figura 5 Diagrama de cajas del RMSE de los modelos de RNA para la estimación de ángulo de amplitud de pierna izquierda

Fuente: elaboración propia.
Figura 6 Diagrama de cajas del RMSE de los modelos de RNA para la estimación de ángulo de amplitud de pierna derecha.
El análisis estadístico Kolmogorov-Smirnov para una muestra señaló que los valores de amplitudes articulares para pierna izquierda y derecha tienen alta probabilidad de poseer una distribución normal. Al realizar el análisis de la prueba Kolmogorov-Smirnov de dos muestras entre los ángulos de amplitud estimados por la RNA y los ángulos de amplitud verdaderos, se verifica, para todos los modelos, que siguen la misma distribución continua (valor p > 0.05). Por otro lado, el ANOVA con ajuste de valor p por medio de la prueba de Bonferroni, indica que las medias entre los ángulos de amplitud estimados y ángulos de amplitud verdaderos no poseen diferencias significativas.
Las Figuras 7 y 8 muestran los resultados de la estimación de los ángulos de la pierna izquierda y derecha de dos sujetos (mujer y hombre) que realizaron el squat. Estos ángulos fueron estimados por la RVS. En estas gráficas, la línea azul representa los ángulos originales, la línea roja indica el ángulo estimado por el modelo 1 de la RVS, y así sucesivamente como se indica en las leyendas de las figuras.

Fuente: elaboración propia.
Figura 7 Ángulo de amplitud experimental real de la pierna izquierda y derecha versus el ángulo estimado por la RVS de cada modelo para un sujeto femenino durante el squat
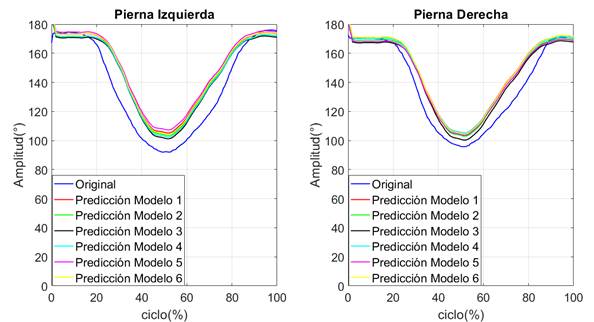
Fuente: elaboración propia.
Figura 8 Ángulo de amplitud experimental real de la pierna izquierda y derecha versus el ángulo estimado por la RVS de cada modelo para un sujeto masculino durante el squat
Las Figuras 7 y 8 indican que los ángulos estimados, utilizando los diferentes modelos de RVS, son similares al ángulo original durante la realización del squat.
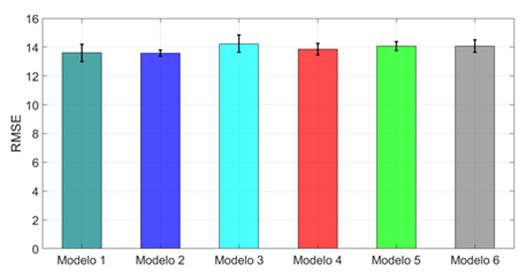
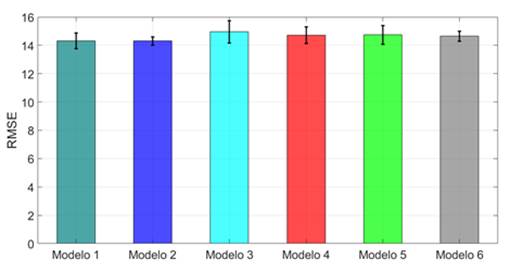
Estos hechos también se pueden comprobar en la Tabla 6 y en la Figuras 9 y 10 que muestran la métrica RMSE calculada a través de (2). Por otro lado, la Tabla 6 muestra el CC calculado a través de (3) para todos los modelos de estimación entrenados.
Tabla 6 Métricas estimadas de RMSE y CC para los seis modelos de RVS utilizados para predecir los ángulos de las extremidades durante el squat.
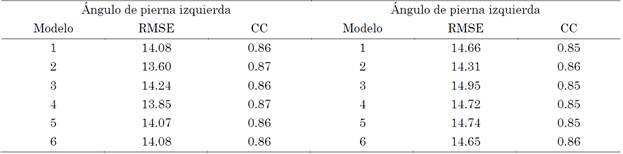
Fuente: elaboración propia.
Fuente: elaboración propia.
Figura 9 Diagrama de cajas del RMSE de los modelos de RVS para la estimación de ángulo de amplitud de pierna izquierda
Fuente: elaboración propia.
Figura 10 Diagrama de cajas del RMSE de los modelos de RVS para la estimación de ángulo de amplitud de pierna derecha
El análisis estadístico Kolmogorov-Smirnov para una muestra señaló que los valores de amplitudes articulares para pierna izquierda y derecha tienen alta probabilidad de poseer una distribución normal. Al realizar el análisis de la prueba Kolmogorov-Smirnov de dos muestras entre los ángulos de amplitud estimados por la RVS y los ángulos de amplitud verdaderos, se verifica, para todos los modelos, que siguen la misma distribución continua (valor p > 0.05). Por otro lado, el ANOVA con ajuste de valor p por medio de la prueba de Bonferroni, indica que las medias entre los ángulos de amplitud estimados y ángulos de amplitud verdaderos no poseen diferencias significativas.
4. DISCUSIÓN
Existen varios métodos para corregir los datos perdidos cuando los marcadores reflectivos fallan durante la adquisición de un movimiento, entre ellos se identifican el aumento de cámaras en los laboratorios que permiten una mayor fiabilidad en la adquisición de los datos y la moderación o limitación en la ejecución del movimiento. Sin embargo, esto se traduce en un aumento de costos en la implementación del sistema físico, así como el riesgo de pérdida de información y retrasos durante la sesión [8]. Este trabajo muestra que el uso de técnicas computacionales es una forma prometedora de evaluar los resultados del seguimiento para mejorar el análisis de datos en biomecánica.
A partir de los resultados obtenidos y reportados en las Tablas 4 y 5, es posible observar que los modelos implementados en este trabajo tienen un desempeño aceptable para la estimación de la amplitud angular de los miembros inferiores durante la ejecución del ejercicio de squat. Asimismo, se puede observar que para la RNA los modelos 2 y 6 muestran los mejores rendimientos con RMSE de 5.72 y 7.42 grados para pierna izquierda y RMSE de 7.25 y 5.35 grados para pierna derecha, respectivamente. Por otro lado, los valores de CC para los modelos anteriormente mencionados alcanzaron un rendimiento de 0.97 y 0.97 para pierna izquierda y 0.95 y 0.97 para pierna derecha, respectivamente. El modelo 1 tuvo el peor rendimiento con un RMSE de 7.83 grados y un CC de 0.97 en la estimación del ángulo de la pierna izquierda, y RMSE de 7.90 grados y CC de 0.96 en la estimación del ángulo de la pierna derecha. Por su parte, para la RVS, los modelos 2 y 4 muestran los mejores rendimientos con RMSE de 13.6 y 13.85 grados para pierna izquierda y RMSE de 14.31 y 14.72 grados para pierna derecha, respectivamente. Los valore de CC para los modelos anteriormente mencionados alcanzaron un rendimiento de 0.87 y 0.87 para pierna izquierda y 0.86 y 0.85 para pierna derecha, respectivamente. El modelo 3 tuvo el peor rendimiento con valores de RMSE de 14.24 y 14.95 grados y CC de 0.85 y 0.86 para la estimación de ángulos de pierna izquierda y pierna derecha, respectivamente.
Es posible afirmar que el rendimiento de la RNA es superior que el de la RVS por aproximadamente 6 grados de diferencia y 0.10 unidades de correlación. No obstante, al realizar la comparación de los valores de amplitud reales con los valores de amplitud estimados, las pruebas estadísticas determinan que las diferencias de distribución y de medias no son significativas (valor p > 0.05). Igualmente, para ambos métodos el modelo 2 fue el que tuvo mejor rendimiento, por lo que es posible determinar que la variable física de estatura tiene una mayor influencia en la estimación del ángulo, por lo que se recomienda profundizar en esta variable en estudios futuros [36]. Aunque los modelos tienen comportamientos diferentes entre sí, se destaca que los seis modelos propuestos pueden aplicarse para estimar la amplitud angular de las extremidades inferiores.
En comparación de los métodos aplicados en este estudio con la literatura, se puede ver una disminución de la incertidumbre; por ejemplo, en [5] se implementan redes neuronales basadas en Long Short-Term Memory (LSTM) para el análisis de marcha en diez pacientes menores con parálisis, donde los valores RMSE estuvieron entre 5.2° y 11.2° con CC entre 0 y 0.7. En [3] se implementa una estimación a través de sensores inerciales con un error RMSE promedio de aproximadamente 8.2 grados, mientras que en el trabajo reportado en [26], se han usado redes neuronales para estimar el ángulo de amplitud durante el squat usando las señales de electromiografía (EMG) en cuatro sujetos de pruebas, implementando métricas de evaluación con valores aproximados de RMSE en 5 grados y el valor medio de coeficientes de correlación (CC) en 0.99. Por otro lado, en el presente estudio el RMSE mínimo fue de 5.72 grados y el mayor CC fue de 0.97 para la estimación del ángulo de pierna izquierda con el modelo 2, usando la RNA como regresor.
En este estudio se realizó una reducción en la dimensionalidad de tres dimensiones (XYZ) a una dimensión (Z) debido a un estudio previo de varianzas, en una base de datos de veinte sujetos de prueba. Es posible que al utilizar una dimensión adicional y con mayor cantidad de sujetos, el error disminuya, así como los coeficientes de correlación sean más aproximados a 1, sin embargo, se conoce que mayor número de características en un método de estimación no es equivalente a mejor rendimiento, debido a que puede aumentar el error y el costo computacional en la estimación.
5. CONCLUSIONES
Este estudio demostró que, a pesar de que un movimiento se registre en tres dimensiones, el uso de métodos computacionales, tales como una red neuronal multicapa con una estructura sencilla, o la regresión de vectores de soporte, permite estimar con alta precisión el ángulo de las extremidades involucradas en su ejecución a través de características obtenidas en un solo eje de interés. Este enfoque podría disminuir recursos físicos como el número de cámaras, reducir el problema de oclusión de marcadores y la incertidumbre en la adquisición de información de movimientos biomecánicos.
Hasta donde sabemos, la estimación cinemática del movimiento humano empleando métodos que involucren la inteligencia artificial durante la ejecución de movimientos con varias extremidades en situación de carga real, es un tema que no se ha estudiado a fondo y es todavía un reto abierto para la comunidad científica mundial.
En el presente estudio se implementaron dos métodos computacionales correspondientes a la regresión de vectores de soporte (RVS) y la red neuronal artificial (RNA), perceptrón multicapa para la estimación de la amplitud articular durante el movimiento de squat ejecutada por veinte sujetos de pruebas sin acondicionamiento físico. Teniendo en cuenta que el objetivo de un modelo de estimación es aproximar el valor calculado lo más cercano al valor real (RMSE cercano a 0), en este estudio los valores de los métodos computacionales implementados se encuentran en un rango aceptable, esto se pudo comprobar a través del análisis estadístico donde los resultados de las diferencias entre ambas muestras (estimada y real) fueron no significativos. Esto permite concluir que la RVS y la RNA para el movimiento de squat ofrecen una estimación de amplitud articular con una aproximación considerable a la amplitud articular calculada con el método estándar.
Se podría implementar este tipo de metodologías computacionales para mejorar la precisión en los resultados obtenidos por métodos de adquisición que involucren otro tipo de tecnologías como las cámaras tipo Kinect.
Como trabajos futuros se propone aplicar la presente metodología en otros tipos de movimiento como la marcha o el salto vertical, usando una cantidad mínima de cámaras, y aumentando el número de participantes. Esto permitirá incrementar la generalidad de los métodos, así como la exploración más profunda de características complementarias que puedan optimizar el rendimiento respecto a ciertos parámetros por medio de comparaciones entre diferentes modelos de organización de la red neuronal. Adicionalmente, se podría explorar la posibilidad de implementar este método en un sistema de captura de movimiento que permita la estimación de parámetros cinemáticos en tiempo real.
No obstante, se proponen realizar estudios de optimización de características, es decir, variaciones en la construcción de los modelos usando las características antropométricas de los sujetos, que permitan comparar diferentes modelos de la red neuronal.

