










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkActa Colombiana de Psicología
Print version ISSN 0123-9155
Act.Colom.Psicol. vol.14 no.2 Bogotá July/Dec. 2011
ARTÍCULO
FUNCIONAMIENTO COGNITIVO: UN INEXTRICABLE JUEGO DE PÉRDIDAS Y GANANCIAS1
COGNITIVE FUNCTIONING: AN INEXTRICABLE GAME OF LOSSES AND GAINS
FUNCIONAMENTO COGNITIVO: UM INEXTRICABLE JOGO DE PREJUIZOS E LUCROS
JULIO CÉSAR OSSAa
UNIVERSIDAD DEL VALLE, CALI, COLOMBIA
Recibido, mayo 5/2011
Concepto evaluación, octubre 24/2011
Aceptado, octubre 25/2011
Resumen
El objeto de este artículo es tomar como referencia el modelo depredador-presa de Lotka y Volterra para abordar el funcionamiento cognitivo, particularmente la clasificación como operación mental. Se utiliza la regresión logística y se determina un modelo de funcionamiento de la clasificación en niños de cuatro años de edad. Los resultados apuntan a un funcionamiento no lineal de la clasificación. Los desempeños sugieren un punto de equilibrio entre la cantidad de preguntas que el niño hace y las operaciones mentales que debe desplegar para coordinar dicha información.
Palabras clave: Modelo depredador-presa, función logística, funcionamiento cognitivo
Abstract
The purpose of this paper is to refer to the Lotka-Volterra model (predator-prey) in order to address cognitive functioning and particularly classification as a mental operation. Logistic regression is used and a model is determined for explaining classification functioning in children four years old. Results show evidence pointing to an on linear function of classification. The children’s performance suggests a balance between the number of questions that the child makes and the mental operations that he must display to coordinate such information.
Key words: Predator-prey model, logistic regression, cognitive function
Resumo
O objeto deste artigo é tomar como referencia o modelo predador-presa de Lotka e Volterra para abordar o funcionamento cognitivo, particularmente a classificação como operação mental. Utiliza-se a regressão logística e se determina um modelo de funcionamento da classificação em crianças de quatro anos de idade. Os resultados apontam a um funcionamento não linear da classificação. Os desempenhos sugerem um ponto de equilíbrio entre a quantidade de perguntas que a criança faz e as operações mentais que deve realizar para coordenar essa informação.
Palavras-chave: Modelo predador-presa, função logística, funcionamento cognitivo
Introducción
¿Acaso es relativa la forma que toma el desarrollo cognitivo?
Se dice que las trayectorias del desarrollo dependen del punto de vista y del método utilizado para observarlas. Por ejemplo, las teorías clásicas adoptan una mirada retrospectiva y proponen un desarrollo ordenado por etapas sucesivas y secuencias que deparan en una organización más elaborada que la anterior (van Geert & Steenbeek, 2005). En los estudios evolutivos, del desarrollo cognitivo ha predominado una concepción que considera el crecimiento como un proceso gradual y acumulativo. No obstante, la métrica que sigue el desarrollo no es acumulativa, creciente de manera monótona, ni tiene secuencias fijas, en otras palabras el desarrollo no es lineal (Puche- Navarro & Martí, 2011). Esta visión que cuestiona el desarrollo no es nueva y muchos psicólogos lo vienen advirtiendo (Valsiner, 2004; Puche-Navarro, 2008, Fischer & Bidell, 2006; Rose & Fischer, 2009).
Desde el punto vista funcional, el crecimiento se define como cualquier tipo de cambio: incremento, disminución o patrones complejos de oscilación de una o más propiedades (Fischer & Kennedy, 1997; van Geert, 1995). En ese contexto, empiezan cada vez más a aparecer estudios que aportan evidencia empírica según la cual los cambios en el desarrollo no son lineales (Smith & Thelen, 2003; van Geert, 1998;van der Maas & Molennar, 1992; Combariza & Puche-Navarro 2009; Spencer & Perone, 2008).
Este estudio pretende dar cuenta que el funcionamiento cognitivo de una operación mental, como la clasificación, puede ser no lineal y puede tomar la forma de un proceso de pérdidas y ganancias que tienen lugar a lo largo de las interacciones entre las variables comprometidas, y que ello se puede confirmar al aplicar una regresión logística a los datos.
Piaget (1950) aduce que "hay un largo camino para pasar de la inteligencia pre-verbal al pensamiento operativo y sostiene que es indispensable la formación de una serie de estructuras intermedias en varios niveles heterogéneos" (Piaget, 1950, p. 132). Para los psicólogos Howe y Lewis (2005), el desarrollo es el resultado de la aparición espontánea de estructuras de orden superior que surgen a partir de las interacciones recursivas entre los componentes más simples (Howe & Lewis, 2005). La cuestión entonces es: ¿qué trayectoria dibuja la formación de estructuras intermedias para Piaget o la auto-organización del desarrollo enunciada por Howe y Lewis? En el nivel macrogenético ambas definiciones son completamente lineales, en contraste lo que sucede a nivel microgenético, da cuenta de dinámicas de organización y de crecimiento no lineales cuando se ponen en evidencia las trayectorias que conducen al equilibrio del sistema.
¿Puede el método ser independiente de la concepción de la que deriva? La cuestión es que si se acepta explorar la premisa que el desarrollo y el funcionamiento cognitivo funcionan de manera irregular y variable, entonces se hace necesario adoptar metodologías de estudio que permitan capturar esas trayectorias desiguales y dar cuenta de ellas. Paradigmas como los sistemas dinámicos (SD en adelante) que permitan dar cuenta de desarrollos irregulares y variables, es decir no lineales (Yan & Fischer, 2002, 2007; Fischer & Bidell, 2006; Spencer & Perone, 2008; Puche-Navarro & Marti, 2011).
Los sistemas dinámicos, ¿un punto de vista relativo del desarrollo?
Un SD se puede definir como el estudio de aquellos fenómenos que cambian en el tiempo y donde el cálculo diferencial es el método matemático que permite estudiar y formalizar dicho cambio (van Geert, 2003). Es conocido que una de las bases de los SD es el cálculo diferencial porque logra dar cuenta de los cambios de estado a través del tiempo. Newton (1642-1727) fue uno de los padres del cálculo diferencial (Newton, s.f., citado por van Geert, 2003).Por medio de tres leyes de movimiento, Newton explica el movimiento elíptico de los planetas resolviendo el problema de la interacción entre dos cuerpos. Para dar cuenta de los cambios que experimenta un objeto en movimiento, el cálculo diferencial establece una relación entre la posición espacial y el tiempo (en este caso tiempo como dimensión absoluta). No obstante, estas reglas de la mecánica celeste no eran aplicables cuando el problema se planteaba con tres cuerpos. Poincaré (1854-1912) abrió las posibilidades para abordar el problema de los tres cuerpos utilizando ecuaciones diferenciales de orden superior y con esto instauró otra de las bases de los SD, a saber la concepción no lineal del movimiento (Poincaré, 1890, citado por Holmes, 1990).
En el siglo XX las ecuaciones diferenciales de la mecánica celeste llegaron a la ecología con el modelo depredador- presa (Lotka, 1925/1956; Volterra, 1926). En este caso el cálculo diferencial, con ecuaciones no lineales, se utilizó para dar cuenta de la dinámica de interacción entre una especie que persigue y una especie que escapa.
La relación predador-presa: Un sistema dinámico no lineal
La relación depredador-presa es un sistema dinámico que modeliza la interacción entre dos especies poniendo en evidencia su no linealidad. La historia señala que Alfred James Lotka (1880-1949) y Vito Volterra (1860-1940) llegaron al modelo por caminos independientes. Inicialmente, Lotka (1925/1956) encontró que algunas reacciones químicas tienen un crecimiento logístico: Se trata de reacciones químicas gobernadas por procesos auto- catalíticos que oscilan alrededor de un punto de equilibrio.
Por otro camino, y de hecho el más conocido, Vito Volterra (1860-1940) describió las variaciones observadas en las poblaciones de peces en el norte del mar Adriático: la historia señala que durante la Gran Guerra se interrumpieron las actividades de pesca, y una vez se reactivó este sector, los pescadores encontraron un número mayor de peces selacios en sus redes. Podría pensarse que la interrupción en la actividad pesquera produciría el aumento de la población de peces presa que produciría, a su turno, el aumento de los peces depredadores. Pero el crecimiento de ambas especies no siguió está dinámica porque los peces depredadores aumentaron su población en una tasa no proporcional a la tasa de crecimiento observada en la población de peces presas.
Volterra explica este fenómeno al modelar la no linealidad de la relación depredador-presa. La pregunta que surge es ¿cómo representa Volterra, el cambio en el tamaño de ambas poblaciones? y ¿por qué las ecuaciones diferenciales dan cuenta de este tipo de interacción? Para ver el proceso que subyace a esta comprensión se presenta a continuación la evolución histórica del modelo depredador- presa. Se parte inicialmente del modelo de crecimiento exponencial de Malthus (1798), luego del modelo de crecimiento logístico de Verhulst (1938), y en tercera instancia se retoma de nuevo el modelo depredador-presa, y finalmente se presenta la regresión logística.
Modelo de crecimiento exponencial
El modelo de Malthus (1798) describe el crecimiento poblacional de una sola especie y tiene como propósito predecir y anticipar consecuencias (véase Anexo 1, Ecuación 1). Para Malthus la tasa intrínseca de crecimiento (r) es una constante y cuando es positiva la población crece ilimitadamente porque no está restringida ni por alimento ni por competencia. Según este modelo, la población crece de forma exponencial mientras que los medios de subsistencia crecen de forma aritmética (Malthus, 1798, p. 6).
Modelo de crecimiento logístico
El aporte del modelo de Verhulst (1838) es transformar un modelo de crecimiento exponencial en un modelo de crecimiento logístico que utiliza una ecuación no lineal de naturaleza caótica (véase Ausloos & Dirickx, 2006). Verhulst (1938) utilizó su modelo (véase Anexo 1, Ecuación 2) para describir la dinámica de crecimiento de la población de algunos países europeos en función de la densidad de la población.
El paso de lo lineal a lo no lineal se logra cuando Verhulst agrega el termino (K) que denota la auto-limitación, y establece así la gran diferencia con el modelo de Malthus (Cramer, 2003, 2004). El crecimiento inicial se expresa en el primer término de la ecuación (crecimiento exponencial) y cambia cuando interviene el término no lineal K que denota la capacidad de carga y que impide el libre crecimiento de la población (Berryman, 1992; Gabriel, Saucy & Bersier, 2005; McCaig, Norman & Shankland, 2008; Ross, 2009).
Modelo de la relación depredador-presa
El modelo de Lotka (1925/1956) y Volterra (1926) describe la dinámica de competencia entre dos especies mientras que los modelos de Malthus y Verhulst describen la dinámica de una sola especie. Pero lo gran diferencia con el modelo de Malthus es que se utilizan dos ecuaciones diferenciales no lineales para describir la interacción depredador-presa. Las ecuaciones diferenciales dan cuenta de este tipo de interacción al representar la complejidad del sistema con pocos elementos. En este modelo el cambio en el tamaño de la población no está determinado por causas externas (Hofbauer & Sigmund, 1988). Las ecuaciones diferenciales (acopladas) dan cuenta de que el equilibrio del sistema depende de un proceso de la auto-regulación (denominado ciclo límite). El modelo depredador-presa (véase Anexo 1, Ecuación 3 y 4) revela la naturaleza no lineal del sistema y representa las trayectorias de interacción tal y como se observa en la siguiente figura:
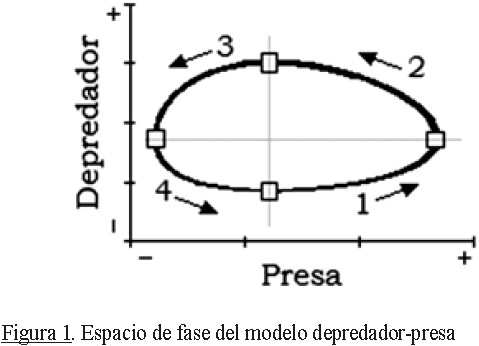
En la Figura 1 se presenta el espacio de fase que permite dibujar el comportamiento del modelo depredadorpresa. En el eje X se presenta el tamaño de la población presa y en el eje Y el tamaño de la población depredador. Se observa que las flechas sugieren un flujo del movimiento cada uno con una dinámica de interacción diferente como se observa en la siguiente descripción:
- En la región 1: Más presas causan más depredadores.
- En la región 2: Más depredadores causan menos presas.
- En la región 3: Menos presas causan menos depredadores.
- En la región 4: Menos depredadores causan más presas.
Como se observa, este ciclo de interacción es un sistema dinámico no lineal por las siguientes razones. Es un sistema porque sólo con algunos elementos, abstraídos de la realidad, puestos en relación, da cuenta de la complejidad del proceso de interacción. Es dinámico porque presenta cambios a través del tiempo (se mueve). Finalmente, es no-lineal porque la naturaleza del proceso difiere conforme pasa el tiempo: Al inicio, el crecimiento describe una trayectoria lineal que cambia y deja de ser lineal, es decir proporcional. Dicha dinámica de crecimiento no-lineal no se puede abarcar con una sola regla de crecimiento.
Por último, debe mencionarse que Berkson introduce la expresión Logita partir de la ecuación logística de Verhulst (Berk son, 1944, citado por Cramer, 2003). La expresión  es la base de la regresión logística y puede ser formulada utilizando los logaritmos neperianos
es la base de la regresión logística y puede ser formulada utilizando los logaritmos neperianos  con los coeficientes β asociados a cada variable.
con los coeficientes β asociados a cada variable.
Balance provisional
Los modelos de crecimiento, previamente mencionados, permiten describir la evolución temporal de las poblaciones y predecir comportamiento futuro con base en la evidencia actual. En el caso de Malthus (1978) se describe el cambio, en forma exponencial, de la población de Estados Unidos desde 1790 hasta 1860. Con Verhulst (1838) se accede a una descripción no lineal con la población de Bélgica y Francia. Finalmente, Lotka (1925/1956) y Volterra (1926) describen la dinámica de interacción entre dos especies y la dinámica oscilatoria del tamaño de ambas poblaciones.
Las ecuaciones diferenciales de los modelos describen la evolución de un sistema dinámico y dan cuenta del cambio de estado a través del tiempo sobre la base de la interacción de los componentes del sistema. Dichas ecuaciones representan la evolución y el cambio a través del tiempo. Su estructura se basa en el uso de parámetros (valores cuantitativos asociados a las variables), variables de estado (variables dependientes), tiempo (variable independiente) y ecuaciones de movimiento o diferenciales (Isaza & Campos, 2006).
El uso de los modelos de crecimiento logístico en psicología del desarrollo cognitivo
Los modelos de crecimiento logístico, en la medida en que simulan el cambio a través del tiempo, constituyen una alternativa metodológica para abordar el cambio en el desarrollo cognitivo. No en vano esas formulaciones llevan algún tiempo aplicándose al campo de la psicología y, específicamente, al campo del funcionamiento cognitivo (ver Van Geert, 1991).
Paul Van Geert introdujo los modelos de crecimiento logístico utilizándolos en el estudio del desarrollo del lenguaje. El autor adaptó la ecuación logística de Verhulst para modelar las dinámicas de desarrollo (Van Geert, 1994, pp. 174-176). Siguiendo la lógica depredador-presa Van Geert formula la relación entre atención y esfuerzo (véase Anexo 1, Ecuación 5). Van Geert (1991), a partir del modelo de Verhulst, concluye que el crecimiento del vocabulario sigue una curva logística. El modelo se comporta así: el crecimiento gramatical depende de la adquisición de algunas palabras, las habilidades necesarias para aprender nuevas palabras contribuye al aprendizaje de reglas gramaticales, un rápido incremento en el conocimiento gramatical consume parte del tiempo y esfuerzo que puede ser usado para construir el vocabulario inicial (Dromi, 1986 citado por Van Geert, 1991). Es decir, el vocabulario y el conocimiento sintáctico compiten por el mismo recurso.
El crecimiento del vocabulario requiere de recursos y ellos están auto-limitados: La auto-limitación se define por la capacidad de carga (término r) y determina el máximo nivel de crecimiento a partir de los recursos disponibles (competencia). El crecimiento puede alcanzar el nivel máximo posible si todos los recursos disponibles son invertidos, pero existe una competencia donde confluyen el esfuerzo, la cantidad de información y otros recursos (entre otros los emocionales). La competencia por dichos recursos limita cualquier proceso de crecimiento y si demasiados recursos se asignan a un mismo proceso el sistema se torna inestable (Van Geert, 1991). Como se evidencia en Verhulst (1978), cuando la capacidad de carga aumenta y pasa el umbral el sistema se torna caótico (Ausloos & Dirickx, 2006).
El modelo de competencia también ha sido adaptado por Van Geert para observar el uso de estrategias en la solución de problemas. En este caso el sistema dinámico se configura a partir de dos estrategias que compiten entre sí (A versus B). La tasa de crecimiento de una estrategia (A) es una función de la diferencia entre su propia capacidad de carga y el incremento en el nivel de la estrategia (B) con la cual compite (Van Geert, 1991); es decir, las estrategias son denso-dependientes.
Por otro lado Yan y Fischer (2002) adoptan el modelo depredador-presa desde la perspectiva del micro-desarrollo. Los autores utilizan este modelo para describir el aprendizaje de reglas de producción, y explicar las trayectorias de desempeño en el marco de una relación entre los estudiantes y el instructor. El modelo es expresado a partir de dos ecuaciones diferenciales (véase Anexo 1, Ecuación 6 y 7).
Las ecuaciones de Yan y Fischer (2002) representan un proceso dinámico de competencia entre dos especies, en este caso denominadas como estudiante e instructor. Igual que en el modelo depredador-presa la co-construcción, a través de interacciones asimétricas entre el estudiante y el instructor, está dada a partir de un tiempo de retraso en la retroalimentación de la ayuda.
Ambos modelos de crecimiento logístico (Van Geert, 1991, 1995; Yan & Fischer, 2002) son pensados desde la relación de competencia entre depredador-presa. Ello se evidencia en la manera como se concibe la relación crecimiento gramatical frente al aprendizaje de reglas gramaticales o la relación estudiante frente al instructor.
Problema
En este estudio se aborda la operación mental denominada clasificación, y se utiliza la regresión logística para explorar su funcionamiento en un grupo de 20 niños de cuatroaños de edad. Se utiliza una tarea que implica la coordinación de hasta cinco dimensiones cualitativas para encontrar una carita en un espacio muestral de 32 elementos.
La hipótesis que subyace es que un funcionamiento clasificatorio, que exige la coordinación de diferentes variables, es de naturaleza no lineal. No se trata entonces de aplicar la misma ecuación de Lotka y Volterra; se la toma como referencia para abordar desde esta perspectiva el funcionamiento cognitivo.
El objetivo es utilizar la regresión logística para observar la dinámica que subyace al proceso de clasificación.
Método
Diseño
Se trata de un estudio de mediciones repetidas (series temporales cortas) e interrumpidas (Arnau, 1999). En cada aplicación se presentaron cinco experimentos con el objetivo de recuperar el mayor número de desempeños en un espacio corto de tiempo.
Participantes
Veinte niños (12 niñas y 8 niños, Mage = 4,0 años, rango de edad: cuatro años a cuatro años y un mes) fueron seleccionados de cuatro jardines infantiles de la ciudad de Cali-Colombia. Los jardines son instituciones educativas privadas pertenecientes a un estrato socioeconómico medio-alto (estratos 4 y 5) de acuerdo con la clasificación del departamento administrativo nacional de estadística (DANE). Se tomó un número similar de niños y niñas de cada jardín como criterio para no introducir sesgos en la distribución de los participantes en función del género ni del lugar de procedencia. La participación de los niños en el estudio dependió de su libre albedrío, del consentimiento escrito de sus padres y de la aprobación correspondiente de la dirección de la institución educativa.
Instrumentos
La tarea "LAS CARITAS" es una situación de resolución de problemas utilizada en estudios de nuestro equipo (Ossa & Puche-Navarro, 2010) derivada con mucha libertad y lejanamente de la tarea de las 20 preguntas (Mosher & Hornsby, 1966). El objetivo del juego es encontrar la carita en el menor número de movimientos: Haciendo click sobre las caritas o formulando preguntas que se pueden responder con un sí o con un no. La tarea funciona como un juego de adivinanzas y preguntas porque los niños deben descubrir la carita que el investigador tiene en mente.
La tarea se presentó en un entorno virtual a los niños participantes en un computador portátil con un tamaño de pantalla de 40 cm (15.6"). Se diseñaron cuatro aplicativos cada uno de ellos compuesto por cinco pantallas y cada pantalla se conformó por 32 caritas. Las caritas se configuraron a partir de la combinación de cinco categorías: Género (niño o niña), color de pelo (castaño o amarillo), gorro (con gorro o sin gorro), color de la camisa (azul o roja) y sonrisa (sonríe o no sonríe).
Una de las características metodológicas de esta situación de resolución es que la información obtenida con las preguntas puede cambiar el estado representacional de la tarea y con las acciones cambia el estado real de la tarea. En esas condiciones el espacio de búsqueda disminuye con cada criterio de clasificación abstraído de los objetos y su reducción es proporcional en la medida que los niños hacen intersecciones de dicha información. Es así como las preguntas le brindan información al niño sobre cinco categorías de los objetos y con cada pregunta se descarta la mitad de las caritas (espacio muestral de posibles candidatos) en el espacio de la tarea. Esta característica de la situación es poco frecuente en las situaciones experimentales con las que se estudia el funcionamiento de la clasificación (abstraer y coordinar información), y en esa medida vale resaltar que se trata de una de sus bondades.
Procedimiento de recolección de información
La aplicación de la tarea fue individual, en el jardín infantil y con una duración que oscila entre cinco y 15 minutos (aproximadamente). Frente a la pantalla del computador se formularon breves conversatorios, semi-estandarizados, entre niño y experimentador. Los pasos seguidos con cada uno de los participantes fueron los siguientes:
- Se verificaron aspectos técnicos tales como el uso del ratón del computador.
- Una fase de familiarización donde se verificó que cada niño comprendiese la meta de la tarea.
- Se identificó cada uno de los atributos de las caritas preguntando al niño por las semejanzas y diferencias entre ellos.
- Se presentó la consigna: "Estoy pensando en una de estas caritas que están en la pantalla y tú tienes que encontrarlo. Para eso, puedes hacerme preguntas a las que puedo responder con un SÍ o un NO. También puedes hacer click sobre la carita. La idea es encontrar la carita haciendo la menor cantidad de movimientos".
- En el inicio de cada pantalla se formuló nuevamente la consigna de la tarea.
Procedimiento de medición
Los registros de los desempeños de los se realizaron con un software "Rostrox" diseñado específicamente para el estudio. El programa "Rostrox" generó para cada niño una hoja de cálculo "Excel" donde se registraron las elecciones de cada carita y las coordenadas espaciales que ocupan en la pantalla. Adicionalmente, se registraron las preguntas del niño teniendo en cuenta la secuencia de movimientos en la pantalla.
Resultados2
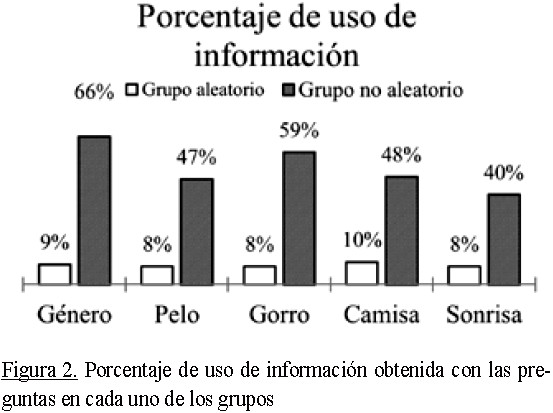
Los resultados fueron clasificados, según el desempeño de los niños, en dos clases de grupos utilizando para ello la técnica k-medias3. Los grupos fueron denominados: Aleatorios (10 niños) y no-aleatorios (10 niños). En el grupo aleatorio el promedio de la búsqueda guiada por el uso de la información es de 9% y en el grupo no aleatorio el promedio es de 52%.
En la figura 2 se observa el porcentaje de búsqueda guiada por el uso de la información para cada una de las variables de la tarea y para cada uno de los grupos antes mencionados. La prueba X2 de Pearson con 4 grados de libertad arroja un valor de 2,681 (p=0,613). El resultado señala que no hay diferencias significativas entre las variables; es decir, no hay evidencia para señalar que los niños se inclinan por una variable determinada.
Regresión logística (Método forward stepwise- Likelihood ratio)
El método forward Stepwise (en adelante FORWARD) incluye paso a paso las variables independientes con mayor peso explicativo en la variación de la variable dependiente. Las variables más relevantes identificadas por la regresión logística son: "género" (parámetro β = 1,779) y "gorro" (parámetro β = 1,369). Por otro lado, la variable "barrido espacial" (parámetro β = -1,103) es significativa y su incidencia es negativa de cara a una búsqueda sistemática; es decir, una búsqueda regulada por el uso y coordinación de información.
Por otra parte la variable "barrido espacial", si bien no presenta la misma naturaleza de las variables de la tarea, juega un papel significativo en las rutas trazadas por los niños para encontrar el objetivo. Estos datos apoyan la idea de que la variable "barrido espacial" es un factor que disminuye la probabilidad de ocurrencia de una búsqueda sistemática. Para esta variable predictora el valor del exponente (β) es 0,332, lo cual indica que la probabilidad de hacer una búsqueda sistemática es 66.8% (1-0.332=0,668) menor en los niños que hacen barridos espaciales que en los niños que no los hacen.
Finalmente, el método crea una variable predictora denominada "constante" (parámetro β = -0,653) la cual se incluye en la ecuación. La estimación de los parámetros de la función Y (es decir la respuesta del modelo) se realiza a partir de los valores de los parámetros de las variables predictoras: constante, género y gorro.
Cuando se asignan los valores del parámetro β a cada una de las variables la expresión logística queda así:
La solución numérica de la anterior expresión arroja que la probabilidad de que un niño sea asignado a una búsqueda sistemática es del 92%. Este resultado depende sólo de dos variables de la tarea (género y gorro), y de no hacer barridos espaciales.
Con base en este modelo se puede afirmar que los niños de cuatro años que utilizan la información proveniente de las variables "género" y "gorro", y que no hacen barridos espaciales, tienen una probabilidad de 92% de hacer una búsqueda sistemática. La prueba Hosmer y Lemeshow es igual a 3,306, y con 3 grados de libertad no es significativa (p = 0,347). La no significancia se refiere a que no existen diferencias pronunciadas entre las frecuencias de los casos observados y las frecuencias de los casos pronosticados, por tanto puede afirmarse que las variables seleccionadas contribuyen significativamente en el modelo. El porcentaje global de clasificación del modelo es de 81,8%, la especificidad es de 88,5% (error tipo I = 11,5%) y la sensibilidad es de 75% (error tipo II = 25%).
Como se mencionó antes, para una solución ideal de la tarea se debe utilizar y coordinar la información proveniente de cinco variables. A través de la regresión logística (FORWARD) se identifican las variables que los niños utilizan para resolver la tarea. No obstante, en la exploración descriptiva de los datos esta relevancia nunca se insinuó. En resumen, de las cinco variables presentes en la tarea, sólo las variables "género" y "gorro" son significativas para el niño, y a esto se agrega el tipo de barrido que realiza.
Cuando se incluyen todas las variables independientes con método introducir (en adelante ENTER) se verifica la razón por la cual se excluyen del modelo las variables "color de pelo" (β = 0,649), "sonrisa" (β = 0,091) y "color camisa" (β = -0,467). Ninguna de ellas tiene un peso significativo en la varianza de la variable dependiente, es decir, no contribuyen significativamente en la búsqueda no aleatoria.
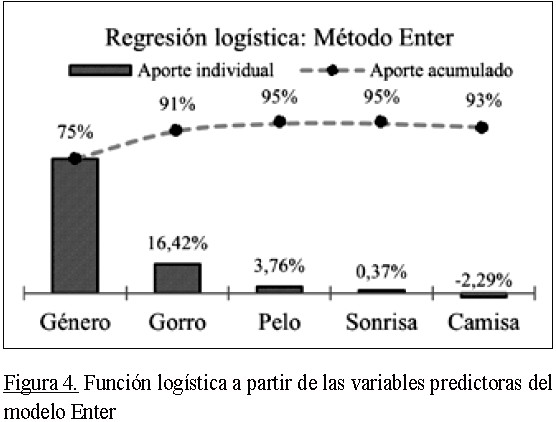
Se observa en la Figura 4 que la probabilidad de hacer una búsqueda sistemática es del 75% cuando el niño o niña pregunta por la variable. Pero con dos preguntas (género y gorro) la probabilidad es de 95%. Como se observa ambos porcentajes tienen un crecimiento exponencial. Con las preguntas por las variables "color de pelo" (tercera pregunta) y "sonrisa" (cuarta pregunta) se presenta una saturación y el crecimiento, por obvias razones, no sigue la tendencia exponencial.

Finalmente, y vale la pena resaltar este aspecto, cuando los niños o niñas preguntan por el "color de la camisa" (quinta pregunta) la probabilidad de éxito empieza a descender.
Discusión
La función logística permite observar la manera como los niños utilizan la información proveniente de las cinco variables que entretejen la operación clasificatoria en esta tarea, y que constituyen el feedback para orientar la búsqueda de un objetivo. Dado que los recursos de la memoria de trabajo son limitados por su capacidad de procesamiento simultáneo, los niños de cuatro años de edad deciden optimizar los recursos disponibles. Dicha optimización consiste en utilizar al máximo la información proveniente de pocas variables, en lugar de utilizar parcialmente la información proveniente de muchas variables. En esa dirección, el título de este artículo pretende dar cuenta de que ese funcionamiento puede tomar la forma de un proceso de pérdidas y ganancias que suelen ocurrir a lo largo de las interacciones entre las variables comprometidas.
Desde el punto de vista de la distribución de probabilidad de las variables, este comportamiento tiene mucho sentido. Por ejemplo, tomar como referencia de búsqueda el valor de una variable, hacer una serie de ensayos, no tener éxito, y pasar a utilizar como referencia el valor de otra variable es lo mismo que hacer una búsqueda aleatoria sin información (feedback).
El espacio de búsqueda se reduce con una pregunta, y se logra una mayor reducción si se coordina la información proveniente de dos o más variables. De acuerdo con el resultado de la función logística (métodos FORWARD y ENTER), se observa que la coordinación de información es un recurso limitador del crecimiento. El límite está determinado por la cantidad de información que puede ser procesada simultáneamente.
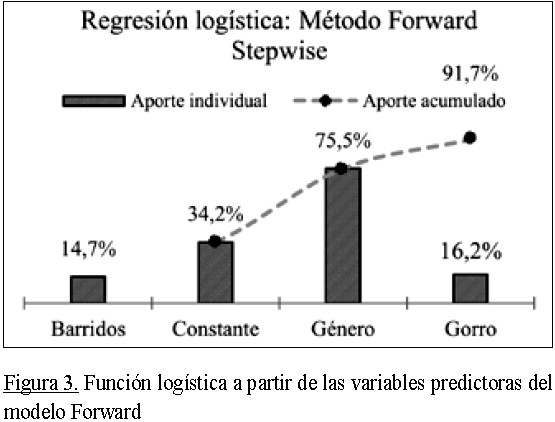
Como se observa en la Figura 3, cuando el niño hace barridos espaciales, la probabilidad de ser asignado a la búsqueda sistemática es de 14,72%; cuando no hace barridos ni tampoco preguntas, la probabilidad es de 34,23%. Cuando el niño utiliza la información proveniente de una variable la probabilidad de ser asignado a la búsqueda sistemática es de 75,5%, y cuando utiliza la información de dos variables simultáneamente la probabilidad es de 91,7% (las dos condiciones implican que el niño no haga barridos espaciales). Al comparar este crecimiento con una curva de crecimiento exponencial se obtiene un R2 igual a 0,9425. Este valor (próximo a 1) corrobora que el crecimiento exponencial puede ser capturado por la ecuación.
Lo interesante se observa cuando la información a coordinar proviene de tres o más variables que se deben intersectar en un solo objeto. Cuando se deben coordinar tres variables la probabilidad es de 95,5%, y cuando se deben coordinar cuatro variables, la probabilidad es de 95,8%. Como se observa, el crecimiento inicial (exponencial) se detiene y, por lo tanto, el incremento en la probabilidad de ser asignado a una búsqueda no es ni proporcional al incremento observado anteriormente, ni proporcional al número de preguntas. Es decir, el cambio en las probabilidades puede ser descrito a través de una función logística.
La evidencia empírica muestra que este crecimiento es dinámico y da cuenta de la interacción entre los recursos del sistema. En este caso, la relación se establece entre la información que el niño obtiene de la tarea (feedback de las preguntas) y el número de coordinaciones que puede establecer. Los niños que hacen una o dos preguntas son más sistemáticos en sus búsquedas que los niños que hacen tres o cuatro preguntas. La cantidad de preguntas no significa un aumento proporcional en una búsqueda sistemática. Esto, en parte, se explica por la saturación del sistema dado el número de elementos referenciales que se deben coordinar y la carga cognitiva que implica sostener dicho proceso.
El crecimiento no lineal del funcionamiento de la clasificación se observa en los siguientes aspectos: Primero, hacer barridos espaciales y no hacer preguntas se traduce en una tasa de probabilidad de éxito bastante baja. Al incluir la constante en el modelo se encuentra una marcada diferencia entre hacer barridos espaciales y no hacerlos siempre y cuando se observe la condición "no hacer ninguna pregunta4". Segundo: La diferencia entre no hacer preguntas, hacer sólo una pregunta o hacer dos preguntas tiene un crecimiento exponencial (r2 = 0.9425) que llegar a un límite cuando se hacen tres o cuatro preguntas. El crecimiento exponencial se detiene y la tasa de crecimiento es más lenta. Tercero: Paradójicamente es más eficiente hacer sólo tres o cuatro preguntas en lugar que hacer cinco preguntas. Cuando en el modelo se incluyen cinco preguntas, la probabilidad de hacer una búsqueda sistemática se reduce.
El punto de equilibrio encontrado es la obtención de información proveniente de dos variables y la coordinación e intersección de esa información de cara a la reducción del espacio de búsqueda. Tener más información no implica un cambio significativo en la probabilidad de éxito en la búsqueda. De hecho, se observa que una cantidad mayor de información puede causar interferencia de cara a una búsqueda sistemática.
En el funcionamiento de la clasificación, se observa que a mayor cantidad de información (es decir los criterios abstraídos de los objetos), mayor número de recursos que deben ser destinados para sostener dicha carga representacional. Por otro lado, la operación de la clasificación implica coordinar y proyectar dicha información en un objeto, y el número de coordinaciones es proporcional al número de preguntas. En este sentido, cuando se destinan buena parte de los recursos para sostener la carga representacional de la información, el sistema cognitivo se queda con menos recursos para operar sobre dicha información y transformarla vía coordinaciones inferenciales. Por tanto, el punto de equilibrio se establece entre los recursos que deben ser destinados para representar la información y los recursos que deben ser destinados para operar sobre dicha información. Es por ello que se habla de pérdidas y ganancias: perder información para ganar en operación y transformación. De cara a esta interacción entre los componentes del sistema (representaciones y operaciones sobre las representaciones), es crucial el juego de pérdidas y ganancias.
Esta relación es inextricable,como en el modelo depredar- presa, en el sentido que pueden observarse crecimientos simultáneos, tanto en la cantidad de información obtenida en la tarea como en las operaciones y coordinaciones que pueden realizarse sobre dicha información (ganancias en ambos planos). Cuando la cantidad de información aumenta (ganancia) se observa una detención la eficiencia de las operaciones que se traduce en un menor número de coordinaciones5 (pérdida). Cuando la cantidad de información se reduce (pérdida) se observa un incremento (ganancia) en el número de coordinaciones que pueden ser aplicadas a dicha información.
1 Este trabajo forma parte de la tesis para optar por el título de Doctor en Psicología de la Universidad del Valle, bajo la dirección de Rebeca Puche-Navarro Ph.D. El autor agradece a Rebeca Puche-Navarro, directora de Tesis Doctoral y su apoyo en el desarrollo del presente trabajo. Volver
2 Para el análisis de los resultados del modelo de regresión logística se utilizaron los programas SPSS 16 y MATHEMATICA 6. Volver
3 Esta técnica permite seleccionar grupos representativos a partir del tipo de búsqueda que los niños hacen. El número de cluster en este caso se ha seleccionado a partir de las distancias euclidianas entre cada uno de los desempeños de los niños y los centroides definidos por el algoritmo. Un centroide es un punto que define el centro geométrico de un objeto (en este caso las nubes de datos). Volver
4 Esta diferencia sólo aplica para este modelo y bajo los parámetros obtenidos para la constante o término independiente (de las covariables). Debe observarse que hacer o no hacer barridos espaciales (sin feedback) no tiene ninguna diferencia en la distribución de las probabilidades de la tarea. Incluso es mucho más eficiente, cuando no se tiene información, hacer una búsqueda ordenada espacialmente que hacer una búsqueda regulada por atributos subjetivos (buscando secuencialmente los objetos que pertenecen a una determinada clase). Volver
5 Menor número de coordinaciones y/o pérdida de límites entre los conjuntos que engloban los objetos. Volver
Referencias
1. Arnau, J. (1999). Series temporales cortas y mínimos cuadrados generalizados: Análisis de la intervención. Revista de Metodología de las Ciencias del Comportamiento,1, 119-135. [ Links ]
2. Ausloos, M., & Dirickx, M. (2006). The logistic map and the route to chaos: From the beginnings to modern applications. The Netherlands: Springer. [ Links ]
3. Berryman, A. A. (1992). The origins and evolution of predator prey theory. Ecology, 73, 1530-1535. [ Links ]
4. Combariza, E., & Puche-Navarro, R. (2009). El uso de la wavelet para el estudio de los funcionamientos inferenciales en niños pequeños. En R. Puche-Navarro (Comp.), ¿Es la mente no lineal? (pp. 111-133). Cali: Programa Editorial Universidad del Valle. [ Links ]
5. Cramer, J. S. (2003). Logit models from economics and other fields. Cambridge: Cambridge University Press. [ Links ]
6. Cramer, J. S. (2004). The early origins of the logit model. Studies in the History and Philosophy of Biological and Biomedical Sciences, 35, 613-626. [ Links ]
7. Fischer, K. W., & Bidell, T. (2006). Dynamic development of action and thought. In W. Damon & R. Lerner (Eds.), Handbook of Child Psychology: Theoretical Models of Human Development (6th ed., Vol. 1, pp. 313-399). NY: Wiley. [ Links ]
8. Fischer, K.W., & Kennedy, B. (1997). Tools for analyzing the many shapes of development: The case of self-in-relationships in Korea. In K. A. Renninger & E. Amsel (Eds.), Processes of development (pp. 117-152). Mahwah, N.J.: Erlbaum. [ Links ]
9. Gabriel, J. P., Saucy, F., & Bersier, L. F. (2005). Paradoxes in the logistic equation? Ecological Modeling, 185, 147-151. [ Links ]
10. Hofbauer, J., & Sigmund, K. (1988). The theory of evolution and dynamical systems. Cambridge, UK: Cambridge University Press. [ Links ]
11. Holmes, P. (1990). Poincare, celestial mechanics, dynamicalsystems theory and "chaos". Physics Reports,193, 137-163. [ Links ]
12. Howe, M. L., & Lewis, M. D. (2005). The importance of dynamic systems approaches for understanding development. Developmental Review, 25, 247-251. [ Links ]
13. Isaza, J. F., & Campos, D. (2006). Ecología: Una mirada desde los sistemas dinámicos. Bogotá: Pontificia Universidad Javeriana. [ Links ]
14. Lotka, A. J. (1925/1956). Elements of Mathematical Biology. NY: Dover Publications, Inc. [ Links ]
15. Malthus, T. (1798). An Essay on the Principle of Population. London: Johnson. [ Links ]
16. McCaig, C., Norman, R., & Shankland, C. (2008). Process algebra models of population dynamics. In K. Horimoto, G. Regensburger, M. Rosenkranz & H.Yoshida (Eds.), Algebraic biology (pp. 139-155). Berlin: Springer. [ Links ]
17. Mosher, F. A., & Hornsby, J. R. (1966). On asking questions. In J. S. Bruner, R. R. Oliver, & P. M. Greenfield et al. (Eds.), Studies in cognitive growth, (pp. 86-102). NY: Wiley. [ Links ]
18. Ossa, J. C., & Puche-Navarro, R. (2010). Modelos bayesianos y funcionamientos inferenciales complejos. Acta Colombiana de Psicología, 13(2), 119-128. [ Links ]
19. Piaget, J. (1950).The Psychology of Intelligence. London: Routledge and Kegan. [ Links ]
20. Puche-Navarro, R. (2008). Érase una vez el desarrollo. En J. Larreamendy-Joerns, R. Puche-Navarro & A. Restrepo-Ibiza (Comp.), Claves para pensar el cambio: Ensayos sobre psicología del desarrollo (pp. 29-69). Bogotá: Editorial Universidad de los Andes. [ Links ]
21. Puche-Navarro, R., & Martí, E. (2011) Metodologías del cambio. Infancia y Aprendizaje, 34, 131-139. [ Links ]
22. Rose, L. T., & Fischer, K. W. (2009). Dynamic development a neo piagetian approach. In J. I. M. Carpendale & L. Smith(Eds,). The Cambridge companion to Piaget (pp.400424). NY: CambridgeUniversity Press. [ Links ]
23. Ross, J. V. (2009). A note on density dependence in population models. Ecological Modelling, 220, 3472-3474. [ Links ]
24. Smith, L. B., & Thelen, E. (2003). Development as a dynamic system. Trends in Cognitive Sciences, 7, 343-348. [ Links ]
25. Spencer, J. P., & Perone, S. (2008). Defending qualitative change: The view from dynamical systems theory. Child Development, 79, 1639-1647. [ Links ]
26. Valsiner, J. (2004). El desarrollo de las teorías de desarrollo: La holywoodización de la ciencia y su impacto. Infancia y Aprendizaje, 27, 147-155. [ Links ]
27. Van der Maas, H.L.J., & Molenaar, P.C.M. (1992). Stagewise cognitive development: An application of catastrophe theory. Psychological Review, 99, 395-417. [ Links ]
28. Van Geert, P. (1991). A dynamic systems model of cognitive and language growth. Psychological Review, 98, 3-53. [ Links ]
29. Van Geert, P. (1994). Dynamic systems of development: Change between complexity and chaos. London: Harvester Wheatsheaf. [ Links ]
30. Van Geert, P. (1995). Growth dynamics in development. In R. F. Port &T. van Gelder (Eds.). Mind as motion: Explorations in the dynamics of cognition (pp. 313-337). Cambridge, MA: MIT Press. [ Links ]
31. Van Geert, P. (1998). We almost had a great future behind us: The contribution of nonlinear dynamics to developmental science in the making. Developmental Science, 1, 143-159. [ Links ]
32. Van Geert, P. (2003). Dynamic systems approaches and modeling of developmental processes. In J. Valsiner & K. J. Conolly (Eds.), Handbook of developmental Psychology(pp. 640-672). London: Sage. [ Links ]
33. Van Geert, P.,& Steenbeek, H. (2005). Explaining after by before: Basic aspects of a dynamic systems approach to the study of development. Developmental Review, 25, 408-442. [ Links ]
34. Verhulst, P. F. (1838). Notice sur la loi que la population poursuit dans son accroissement. Correspondance mathématique et physique, 10, 113-121. [ Links ]
35. Volterra, V. (1926). Fluctuations in the abundance of a species considered mathematically. Nature, 118, 558-560. [ Links ]
36. Yan, Z., & Fischer, K. (2002). Dynamic growth modeling of human cognitive microdevelopment. In: Proc. 2nd International Conference on Development and Learning. Retrieved from http://ieeexplore.ieee.org/stamp/stamp. jsp?arnumber=01011875 [ Links ]
37. Yan, Z., & Fischer, K. (2007). Pattern emergence and pattern transition in microdevelopmental variation: Evidence of complex dynamics of developmental processes. Journal of Developmental Processes, 2, 39-62. [ Links ]

