










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkTecnura
Print version ISSN 0123-921X
Tecnura vol.15 no.29 Bogotá July 2011
Modelamiento y análisis de pequeña señal de un generador de inducción y un STATCOM conectados a un sistema de potencia
Modeling and analysis of a small signal of an induction generator and a STATCOM connected to a power system
Carlos David Zuluaga Ríos1, Alfonso Alzate Gómez2
1 Ingeniero electricista, estudiante de la Maestría en Ingeniería Eléctrica de la Universidad Tecnológica de Pereira. Pereira, Colombia. cardazu@utp.edu.co
2 Ingeniero electricista, magíster en Ingeniería Eléctrica. Docente titular de la Universidad Tecnológica de Pereira. Pereira, Colombia. alalzate@utp.edu.co
Fecha de recepción: 7 de marzo de 2011 Fecha de aceptación: 30 de mayo de 2011
Resumen
En este documento se presenta el modelamiento y análisis de pequeña señal de un generador de inducción (IG) y un compensador síncrono estático (STATCOM), conectados a un barraje infinito, que representa un sistema de potencia; el IG es modelado como un sistema de quinto orden y se le acopla un STATCOM que es estudiado como un modelo de primer orden. El comportamiento dinámico fue simulado y comparado usando MATLAB/Simulink, bajo dos condiciones de perturbación: una variación en el torque de la máquina y una variación en la tensión del barraje infinito debido a un fallo en este punto. Las respuestas obtenidas por el software reflejan que el compensador actúa de forma adecuada, contrarrestando variaciones en potencia y tensión. Cabe resaltar que se debe agregar una etapa de sintonización de parámetros para mejorar las respuestas obtenidas.
Palabras clave: análisis de pequeña señal, compensador síncrono estático, generador de inducción.
Abstract
This paper presents the modeling and small-signal analysis of an induction generator (IG) and a static synchronous compensator (STATCOM) connected to an infinite bus bar, representing a power system, the IG is modeled as ffith-order system and is coupled to a STATCOM is studied as a model of first order. The dynamic behavior was simulated and compared using MATLAB/ Simulink, two conditions of disturbance: a variation in the torque of the machine and a variation in the infinite bus bar voltage because of a failure at this point. The responses obtained by the software show that the compensator acts appropriately counteracting power and voltage variations. Significantly, it must add a stage of tuning parameters to improve the responses.
Key words: analysis of small signal, static synchronous compensator, induction generator.
1. Introducción
El Generador de Inducción (IG) es una gran alternativa para los parques eólicos por su estructura, simplicidad de construcción y su operación libre de mantenimiento, ventajas que hacen de esta máquina una gran utilidad en los sistemas de potencia [1]. Como la penetración de la energía a partir del viento en los sistemas de potencia está en constante incremento, se hace necesario e importante hacer estudios de la estabilidad del IG en estos sistemas [2].
Otro importante elemento dentro de los sistemas de potencia es el compensador síncrono estático (STATCOM), un tipo de FACTS (Sistema de transmisión flexible en corriente alterna) conformado por un inversor fuente de voltaje, el cual a través de un transformador de reactancia intercambia flujo de potencia con la red, permitiendo de esta manera ampliar los límites de estabilidad del sistema y a la vez mejorar algunos de los parámetros de operación [3], [4]. Este dispositivo es ampliamente utilizado en la compensación dinámica de los sistemas de potencia ya que mejora las respuestas del estado transitorio y permanente bajo ciertas consideraciones [5].
Es importante hacer el análisis de perturbaciones en los sistemas de potencia, tal como pérdida de una línea de trasmisión, disminución de los niveles de tensión debido a fallas, etc, para predecir su comportamiento y definir los límites dentro de los cuales puede operar. Con esto se previene al sistema de la presencia de una inestabilidad o un colapso de tensión. El análisis de pequeña señal es una importante herramienta, ya que puede mostrar las limitaciones o dar información acerca del comportamiento dinámico de la máquina ante perturbaciones en el sistema [6]. Para realizar este análisis se puede someter el sistema a pequeñas perturbaciones con el fin de observar la habilidad que tiene éste para mantener el punto de equilibrio [7].
El documento se encuentra organizado de la siguiente manera, en la sección II se presenta el modelo empleado para el generador de inducción, en la sección III se muestran las ecuaciones para el STATCOM, después en la sección IV se expone el modelo empleado para el análisis de pequeña señal, y en la sección V se comenta el caso en estudio; luego en la sección VI se presentan el análisis de pequeña, sus resultados y discusiones frente a los comportamientos de las simulaciones del sistema en estudio. Finalmente, en la sección VII se presentan las conclusiones y trabajos futuros pertinentes frente al tema investigado.
2. Modelo del ig
Con el fin de analizar la estabilidad del IG frente a algunas perturbaciones, se deben plantear los modelos para llevar a cabo este estudio; en primera instancia se define la ecuación que describe el movimiento de la máquina que está dado por la Ec. (1) [1].
Donde H es la suma de las constantes de inercia del sistema rotórico en por unidad (p.u), s es el deslizamiento del IG (velocidad relativa), Te es el torque electromagnético de la máquina y Tm es el torque mecánico de entrada, el cual, para un parque eólico se puede obtener a partir de una turbina eólica. Para este estudio se asume que el viento tiene una velocidad constante, por tanto, el torque mecánico es constante a la entrada del IG.
Según la notación estándar [8], en el contexto de la rotación sincrónica, el IG puede ser representado por un conjunto (ver Ec. (2) a (5)) de ecuaciones diferenciales del flujo magnético de la máquina [1].



Donde ωs es la velocidad síncrona (en p.u, ωs= 1); ωB es la frecuencia base del sistema, ωB= 2π ƒ
El torque electromagnético, Te puede ser expresado como:

Las relaciones existentes entre las corrientes y los flujos magnéticos de la máquina se expresan en las Ec. (7) a (10).




Usualmente el modelo del generador para estudios de estabilidad de potencia es representado por una fuente de tensión y una impedancia transitoria, sin embargo, el modelo detallado puede ser establecido como a partir de las Ecuaciones (11) a (15). Las componentes d y q de la tensión del rotor se hacen cero, respectivamente [1].




Donde
3. Modelo del statcom
La Fig. 1 muestra un sistema de potencia al cual se le conecta un IG, un STATCOM y un condensador, este último utilizado para suplir la potencia reactiva que no genera la máquina de inducción. El compensador estático, detallado en [3], se basa en un transformador de acople y un convertidor fuente de tensión (VSC) conformado por un puente trifásico de tiristores apagados por compuerta (GTO) y un capacitor DC [3].
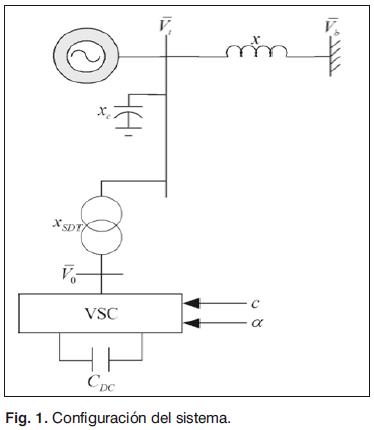
El VSC genera una tensión alterna (AC) controlable v0 = V0 sin (ω t - α). La diferencia de tensiones entre V0 y Vt produce un intercambio de potencia activa y reactiva entre el STATCOM y el sistema de potencia, las cuales se pueden controlar a través de la modificación de V0 y α. Apartir de la Fig. 1 se obtienen las expresiones (16) a (18) [3].



Donde, para el inversor por modulación de ancho de pulso (PWM), c = mk y k es la relación entre las tensiones AC y DC; m es el índice de modulación definido por el PWM, al igual que el ángulo a [3].
4. Modelo Linealizado de pequeña señal
El procedimiento de análisis se fundamenta en llevar todas las ecuaciones definidas previamente a un modelo lineal de espacio de estados. El modelo no lineal del sistema (IG y STATCOM) fue linealizado alrededor de un punto de operación. El modelo linealizado toma la forma de las Ecs. (19) y (20):

Donde las variables de estado linealizadas y las entradas se muestran en las Ec. (21) y (22).

El punto de operación fue calculado a partir de un flujo de carga, las ecuaciones diferenciales y algebraicas del sistema. Cuando se tiene el sistema compensado, las variables y las entradas son las mostradas en las expresiones (23) y (24):


5. Metodología
El sistema estudiado es mostrado en la Fig. 1. Para realizar un análisis de pequeña señal se adopta el siguiente procedimiento [9]:
-
Descripción de los componentes del sistema de potencia mediante las ecuaciones diferenciales y algebraicas.
-
Establecer las condiciones de operación del sistema, es decir, precisar el voltaje de referencia y las potencias generadas y demandas.
-
Linealización alrededor de un punto de operación (modelo lineal). Utilizando los dos puntos anteriores calcular el punto de operación del sistema linealizado y seguidamente calcular todas las constantes de esta configuración. Realizado este paso, desarrollar la simulación efectuando perturbaciones al sistema linealizado.
-
Establecer y modelar el mecanismo de compensación. Éste debe partir del análisis de los valores propios del sistema (eigenvalues) Agregar al sistema el compensador. A partir del sistema ampliado, realizar de nuevo su linealización. Luego, hacer la simulación del sistema aumentado ante las mismas variaciones del sistema sin compensador.
-
Realizar un análisis comparativo con y sin compensador.
-
Implementar el modelo no lineal y comprobar operación con compensación.
La aplicación de esta metodología permite comprobar que el análisis de los valores propios del sistema es acorde con las simulaciones realizadas ante las perturbaciones aplicadas.
En las simulaciones la tensión de referencia en el barraje infinito es Vb= 1∠° y ademásse leaplicaron al sistema dos perturbaciones: una variación en el torque mecánico y un cambio en la tensión en el barraje infinito, a los 0,8s y a los 1,25s, respectivamente. Las perturbaciones aplicadas fueron: llevar el valor de torque de 1 pu a 0,9 pu, de igual forma se modificó la tensión en el barraje infinito.
Del modelo linealizado obtenido aparecen dos entradas tal como se ve en la Ec. (22), que son: el torque mecánico Tm y la tensión en el barraje infinito Vb, para el caso del sistema sin compensador. Para el sistema compensado las entradas son las mostradas en la Ec. (24).
6. Resultados
La tabla 1 muestra los valores propios del sistema sin compensador, en esta tabla λ = σ± jω son los valorespropios,  son los modos de amortiguamiento y
son los modos de amortiguamiento y  es la frecuencia de oscilación.
es la frecuencia de oscilación.
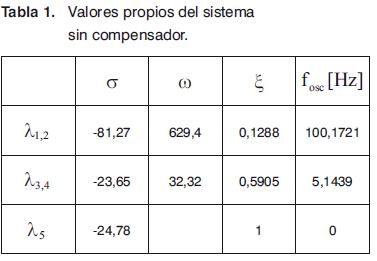
De la tabla 1, también se ve que todos los valores propios tienen parte real negativa, lo que conlleva a decir que el sistema de la Fig. 1 es estable para pequeñas señales. Igualmente, se nota que el sistema sin compensador tiene 2 modos de oscilación, los cuales son: uno alto (100,1721 Hz), uno bajo (5,1439 Hz).
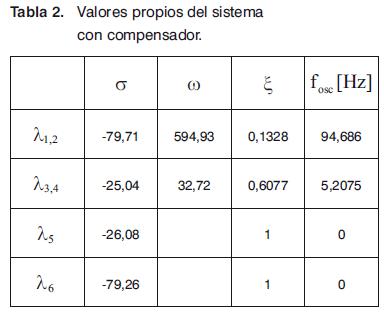
En la tabla 2 están consignados los valores propios del sistema con compensador. Se puede observar que todavía los valores propios del sistema modificado tienen la parte real negativa, lo que asegura la estabilidad ante pequeñas señales. Asi mismo se puede notar que los modos de oscilación se conservan. El polo agregado por el compensador (-79,26) hace que el sistema responda un poco más rápido en comparación con el sistema sin el STATCOM.
Para este trabajo se presentaron dos simulaciones: una es el sistema sin compensador al cual se le aplican dos perturbaciones, una el torque mecánico y otra en la tensión del barraje infinito, simulando una falla en el sistema; y la otra es el sistema compensado, aplicándole las mismas variaciones. Las simulaciones fueron realizadas en Matlab/Simulink de donde se obtienen de nuevo las respuestas de estos sistemas ante las perturbaciones mencionadas. Primero se muestran las simulaciones del sistema linealizado sin compensador y luego con este incluido.
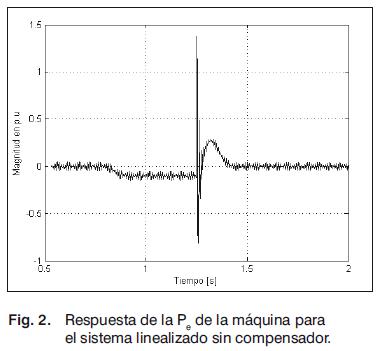
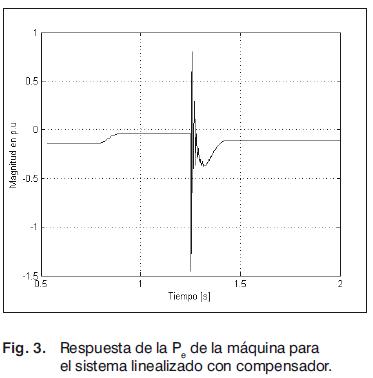
De las Figs. 2 y 3, las cuales pertenecen a la potencia de la máquina, se observan las respuestas del sistema linealizado sin y con compensador, respectivamente. Se puede percibir que el sistema compensado reduce las oscilaciones presentes en el sistema original, además se ve que ante la variación del torque mecánico el compensador hace un efecto e incrementa la potencia; de igual forma, se observa que para la variación de la tensión en el barraje infinito, para el sistema original hay un incremento de potencia, para lo cual el compensador trata de contrarrestar el efecto del aumento de potencia.
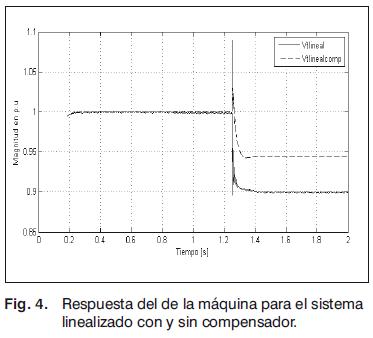
En la Fig. 4 se puede notar que la respuesta del sistema compensado presenta menos oscilaciones que el sistema original, por tanto, el sistema con el STATCOM tiene una gran habilidad para mejorar el perfil de tensión; además, cabe resaltar que ante una variación en el barraje infinito, como sucedió a los 1,25s, se ve que el sistema con el STATCOM tiene un efecto positivo ante la variación, se nota que la tensión para el sistema compensado sufre una alteración, pero no es de gran magnitud comparado con el sistema original, esta diferencia de tensión es del 4,5%.
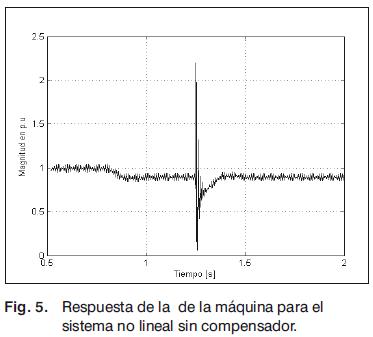
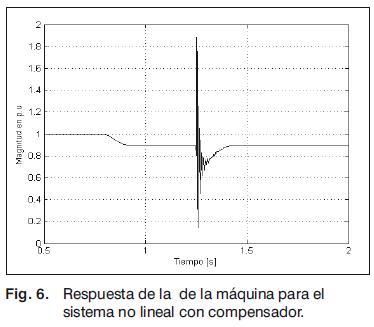
Ya presentadas las simulaciones del sistema linealizado, ahora se expondrá la respuesta de la simulación no lineal para el sistema con y sin compensador, mostrando cómo es el comportamiento de la potencia entregada por la máquina.
Para el caso de la potencia entregada por la máquina en la simulación no lineal, se ve en la Fig.5, las oscilaciones presentes en el sistema original se reducen con la inclusión del compensador (ver Fig. 6); también de la Fig. 6 se nota que ante la variación de la tensión en el barraje infinito el sistema compensado tiene menor sobrepaso; lo que conlleva a decir, que el compensador realiza de manera satisfactoria el equilibrio de la operación de la máquina.
7. Conclusiones
La implementación del STATCOM refleja una mejora ante las perturbaciones aplicadas, reduciendo las oscilaciones presentes ante las alteraciones en el torque y la tensión en el barraje infinito. Cabe resaltar que se debe agregar una etapa se sintonización de parámetros, para que las respuestas obtenidas sean más adecuadas.
Por otro lado, para el sistema no lineal se observa qué compensador opera de forma apropiada, haciendo que las oscilaciones se disminuyan.
El modelo obtenido es de gran utilidad, ya que permite el análisis de los valores propios para el sistema con y sin compensador, cuyo resultado muestra que el sistema es estable ante pequeñas variaciones. También cabe resaltar que ante la implementación del STATCOM los modos y frecuencias de oscilación de los sistemas (con y sin compensación) se asemejan bastante, donde se puede concluir que este dispositivo activo es en efecto adecuado para tratar pequeñas variaciones presentes en el sistema de potencia.
8. Trabajo futuro
Para este estudio se asumió tener características del viento constante, se pretende analizar el comportamiento estocástico del viento para así tener un escenario realista de los parques eólicos que tienen una gran importancia por sus propiedades de generar energía renovable.
También se intentará adicionar una técnica para sintonizar los parámetros del compensador y agregar una técnica de control para mejorar la dinámica de la respuesta ante estas alteraciones.
Por último, se estudiará el caso de tener un generador de inducción doblemente alimentado, ya que es muy utilizado en los parques eólicos.
9. Financiamiento
Este trabajo se desarrolló en el marco del proyecto de investigación: "Identificación de parámetros de un generador eólico doblemente alimentado basado en métodos recursivos bayesianos" en el programa de jóvenes investigadores "Virginia Gutiérrez de Pinilla" y fue financiado por Colciencias y la Universidad Tecnológica de Pereira.
Referencias
[1] H. Li, Z. Chen and L. Han, "Comparison and evaluation of induction generator models in wind turbines systems for transient stability of power systems," International Conference on Power System Technology, 2006. [ Links ]
[2] Z. Chen, "Issues of connecting wind farms into power systems", Transmission and Distribution Conference and Exhibition: Asia and Pacific, 2005 [ Links ]
[3] H. Wang, "Phillips-heffron model of power systems installed with statcom and applications", IEEE Proceedings Generation, Transmission and Distribution, vol. 146, no. 5, pp. 521 -527, Sep. 1999. [ Links ]
[4] A. Alzate, C.A. Torres and A. Escobar "Efectos de un Compensador Serie Síncrono Estático en un Sistema de Potencia," Scientia Et Technica, vol.13, no. 37, pp. 19-24, 2007. [ Links ]
[5] A. ValipourArkhloo, "An LQR/Pole Placement Controller Design for STATCOM," Control Conference, Zhangai: China, june 2007. [ Links ]
[6] F. Mei and B. C. Pal, "Modelling and small-signal analysis of a grid connected doubly-fed induction generator," IEEE in Power Engineering Society General Meeting, vol. 3, pp. 2101-2108, Jun. 2005. [ Links ]
[7] Y. Lopez., and J. Navarro, "Small signal stability analysis of wind turbines with squirrel cage induction generators",Transmission and Distribution Conference and Exposition, 2008. [ Links ]
[8] D. J. Trudnowski, A. Gentile, J. M. Khan and E. M. Petritz, "Fixed-speed windgenerator and wind-park modeling for transient stability studies," IEEE Transactions on Power Systems, vol. 19, no. 4, pp. 1911-1917, 2004. [ Links ]
[9] A. Alzate, Dinámica de sistemas eléctricos: estabilidad y control. Taller de Publicaciones Universidad Tecnológica de Pereira, Colombia: Pereira, 2000. [ Links ]

