










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkTecnura
Print version ISSN 0123-921X
Tecnura vol.16 no.32 Bogotá Apr./June 2012
Diseño y fabricación de un vehículo autonomo impulsado por energía solar
Design and making of an autonomous, solar-energy-powered vehicle
Elsy Del Pilar Carreño Aguillon1, Edwin Alfonso Vacca Melo2, Ingrid Lugo Ariza3
1 Ingeniera Mecánica, Especialista en Gestión de Proyectos. Investigadora de la Universidad Distrital Francisco José de Caldas. Bogotá, Colombia. carrenopoli@hotmail.com
2 Ingeniero Mecánico. Investigador de la Universidad Distrital Francisco José de Caldas. Bogotá, Colombia. edwinvacca@hotmail.com
3 Ingeniera Mecánica. Docente de la Universidad Distrital Francisco José de Caldas. Bogotá, Colombia. ilugoa@udistrital.edu.co
Fecha de recepción: Marzo 25 de 2011 Fecha de aceptación: Noviembre 28 de 2011
Resumen
El termino diseño abarca una amplia gama de significados. Tratándose del automóvil la palabra diseño puede estar dada en función de su apariencia externa; pero también los elementos que lo constituyen son diseñados, no por artistas sino por ingenieros aunque en algunos casos este tenga oportunidad de mostrar algo de capacidad artística. Por lo tanto, el diseño de un automóvil alimentado por energía solar consiste en definir y calcular movimientos, fuerzas y cambios de energía a fin de determinar el tamaño, las formas y los materia les necesarios para cada uno de los componentes interrelacionados del vehículo y de esta manera plantear procesos tecnológicos de fabricación apropiados que permitan llegar a la construcción de la maquina logrando que cumpla, sin falla, la función pretendida.
Este artículo se divide en dos grandes áreas de trabajo; una lo es el diseño y otra lo es la construcción. Estas a su vez se subdividen en tres grupos de aplicación de conocimientos los cuales son: conjunto mecánico, conjunto eléctrico y conjunto fotovoltaico. Estos conjuntos también se dividen en agrupaciones o sistemas y estos en subagrupaciones hasta llegar a la particularidad de cada una de las piezas que lo conforman y que deben ser diseñadas o seleccionadas bajo ciertos criterios ingenieriles de funcionamiento y operación.
Palabras clave: Automóvil, Diseño, Electricidad, Energía solar, Mecánica.
Abstract
The term design covers a wide range of meanings. In the case of the word car design can be given according to their outward appearance, but also the elements that are designed, not by artists, but by engineers, although in some cases this has a chance to show some artistic ability.
Therefore the design of a solar-powered car is to define and calculate movements, forces and energy changes in order to determine the size, shapes and materials needed for each of the interrelated components of the vehicle and thus raise appropriate manufacturing process technologies to allow access to the construction of the machine getting to meet, without fail, the intended function.
This paper is divided into two main areas of work, it is a design and another is the construction. These, in turn are subdivided into three groups of application of knowledge which are: mechanical assembly, electrical assembly and photovoltaic arrays. These sets are also divided into groups or systems, and these into sub-groups up to the uniqueness of each piece they make and must be designed or selected under certain criteria of performance engineering and operation.
Key words: Automobile, Design, Electrical, Solar energy, Mechanics.
1. Introducción
El sol, miles de veces más grande que la tierra es una fuente inagotable de energía subutilizada y además gratuita, por lo que resulta absurdo pensar que hará la humanidad cuando las fuentes agotables de petróleo escaseen, o con qué se alimentarán las actuales aplicaciones que requieren de sus derivados.
En la energía solar han estado puestos los ojos de investigadores y científicos de todo el mundo que indagan sobre las bondades que se pueden recibir del sol y que la misma naturaleza, a través del tiempo, nos ha mostrado en su increíble facultad de transformarla en vida.
Cuando se analiza el actual estado ambiental del planeta surgen cuestionamientos acerca de la continua reducción de los recursos naturales de los cuales el hombre depende para su existencia y de las medidas inmediatas que deben tomarse para frenar y recuperar las riquezas medio ambientales perdidas. Es en este pensamiento reflexivo que se ha podido identificar múltiples causas del acelerado detrimento de las condiciones necesarias para la preservación de la humanidad, logrando encontrar como responsables los elementos resultantes de la transformación de energía de las fuentes fósiles.
Al considera la importancia y masiva utilización de los medios de transporte y la fuente de energía que estos utilizan, fácilmente se identifica uno de los mayores orígenes de la contaminación mundial, es allí donde se reconoce un significativo campo de trabajo en la lucha por la protección del sostenimiento del planeta.
Son estas circunstancias las que nos instan a diseñar y construir un automóvil alimentado por energía solar con el que se pretende dar inicio a la aplicación de la energía fotovoltaica en vehículos terrestres en Colombia que consta, básicamente, de un motor eléctrico alimentado por una serie de acumuladores electroquímicos cargados por energía solar y comandado por un control eléctrico, generando una plataforma investigativa y de desarrollo.
En la realización de este proyecto fue necesario efectuar labores interdisciplinarias en el amplio ámbito de la ingeniería mecánica y de otras áreas de apoyo, generando todo un reto y compromiso con nosotros, con la institución y con la sociedad.
2. Antecedentes
No hay que olvidar que el vehículo eléctrico (VE) es anterior al vehículo de combustión interna (VCI) y que a finales del siglo pasado ya aparecen junto a los vehículos de vapor. Los VE fueron superiores y más aceptados que los vehículos (VCI) hasta 1920, donde la relación prestaciones/precio de los motores de gasolina condena al vehículo eléctrico a su desaparición.
Se han fabricado vehículos eléctricos teniendo como fin el turismo ya que estos no alcanzan velocidades mayores a los 30Km/h y su autonomía es muy corta, Los VE debutaron en Europa el año 1880 y aparecieron en América en 1920, pero hacia 1970 el VE comenzó a ser fabricado de nuevo y ha continuado hasta ahora, a pesar de haber tenido problemas con la autonomía y el precio pero este resulta una buena alternativa para el uso de energías limpias y renovables.
2.1 Condición global
Gracias al desarrollo tecnológico visto en Europa y Japón se desarrollaron autos denominados "Micromachines" que experimentan pequeños motores tanto de combustión o eléctricos; que cuentan con una gran infraestructura tecnológica y de fácil desarrollo.

Las compañías europeas como Mercedes Benz, Chrysler, BMW, Peugeot, Renault y japonesas como Mitsubishi y Toyota entre otros han establecido una colaboración con otros fabricantes para desarrollar y producir pequeños vehículos alimentados por diferentes fuentes de energía donde se desarrollan nuevas tecnologías.
2.2 Condición local Colombia
En Colombia la evolución del auto eléctrico ha sido muy escasa y por lo tanto nula la correspondiente a autos alimentados por energía solar. Existen algunos prototipos del estilo "micromachine" elaborados en nuestro país, que utilizan pequeños motores a combustión, improvisados motores eléctricos o tracción humana por pedal como el que fue construido anteriormente, el cual sirvió de plataforma para llevar a cabo este proyecto.
2.3 Clasificación de vehículos alimentados por energía solar
Existen tres tipos de categoría de vehículos solares:
-
Los que pueden funcionar prácticamente con el sol, sin requerir baterías. Este tipo tiene el lógico inconveniente que si pasa por lugares con sombras o si se nubla se reduce en gran medida sus prestaciones o se detiene.
-
Los que usan los paneles para acumular energía en una o varias baterías y el motor se alimenta de ellas, los paneles aportan una gran parte de la energía que se requiere para su funcionamiento.
-
Los vehículos eléctricos que como mucho llevan algún pequeño panel a fin de mantener la batería o efectuar pequeñas recargas o no llevan ningún panel y básicamente se cargan de la red eléctrica. Para que estos vehículos se consideren solares es imprescindible que en el lugar de la recarga exista una instalación de energía solar que proporcione la energía necesaria. Puede ser una instalación autónoma (con baterías) o con conexión a la red eléctrica que es más eficiente, de esta forma aunque no coincidan los momentos de insolación con las horas de recarga del vehículo el balance energético final es lo que cuenta. Esta es la categoría en la que se encuentra el vehículo diseñado por considerarse apropiada por sus bajos costos y sencillo desarrollo.
3. Metodología
3.1 Cadena de tracción
La mayoría de los VE que actualmente existen en el mercado utilizan sistemas de transmisión originalmente desarrollados para su uso en VCI, basados en la simple idea de reemplazar el motor térmico por uno eléctrico. Sin embargo, los motores eléctricos ofrecen una utilización mucho más flexible que los térmicos, por lo que se puede pensar en diferentes configuraciones de cadenas de tracción.
En general, la cadena de tracción de un vehículo eléctrico, puede dividirse en tres subsistemas principales: suministro de energía, transmisión eléctrica, y transmisión mecánica.
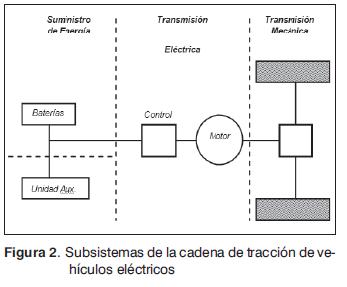
El diseño de estos subsistemas, así como de los componentes que los constituyen, puede variar considerablemente dependiendo del tipo de vehículo al que van dirigidos.
Dentro de las consideraciones a tener en cuenta en el diseño de la cadena de tracción se pueden citar las siguientes:
- - Tipo de tracción: delantera, trasera o a las cuatro ruedas:
- Número de motores que van a utilizarse.
- Transmisión comparable a la de un VCI o directa.
- Utilización o no de caja de velocidades
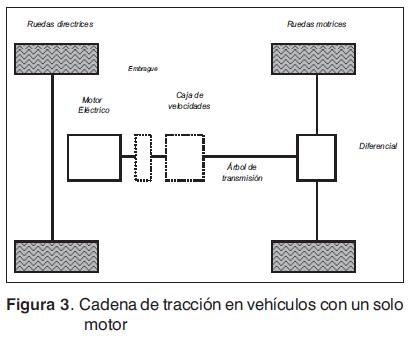
- Cadena de tracción en las que se utiliza un solo motor
Una variante de esta configuración que se utilizó en este proyecto, consiste en no utilizar caja de velocidades ni embrague (marcados en línea discontinua en el dibujo) y reemplazarlos por un controlador de potencia eléctrica, acoplando el motor eléctrico al árbol de entrada del diferencial. Esta solución es posible gracias a que los motores eléctricos, a diferencia de los térmicos, desarrollan un alto par en el arranque y ofrecen, en general, un ancho rango de velocidad.
Establecer una base teórica que permita realizar una serie de cálculos previos. Dependiendo del uso del VE, se debe estimar algunas de sus características, así como las prestaciones exigidas como:
- Peso 250Kg.
- Autonomía deseada 60Km en dos horas
A continuación se enumeran una serie de pasos, ordenados de manera lógica, que se siguieron para el diseño del vehículo eléctrico.
3.2 Dimensionamiento de la cadena de tracción
En par: cálculo de los pares máximos a desarrollar en las ruedas motrices.
En potencia: potencias máximas a aplicar a las ruedas.
Para el cálculo de los pares máximos se utilizarán los resultados de las ecuaciones descritas posteriormente en el "Cálculo de las características de funcionamiento del VE". Las potencias máximas se calcularán teniendo en cuenta que:

Donde:
Tt: par de tracción (en la rueda)
ωr: Velocidad angular de la rueda
Mediante los cálculos anteriores se establece la potencia necesaria del motor y, según la autonomía deseada, se conoce la capacidad necesaria de las baterías.
Una vez conocidos los requerimientos de la cadena de tracción, se seleccionarán e instalarán los elementos que la componen: Conjunto motor
- convertidor de potencia, Baterías, Ruedas, Sistema de suspensión, sistema de Frenos, sistema de dirección entre otros. Se debe tener en cuenta, a la hora de componer la cadena de tracción, que es interesante conseguir un reparto equilibrado de las masas [1].
3.3 Calculo de características del funcionamiento del vehículo
Durante la conducción de cualquier vehículo son varios los aspectos que obligan a pedir al motor una respuesta diferente en cada momento. El par que debe transmitir a las ruedas debe ser el adecuado para vencer las resistencias opuestas al desplazamiento (par de rodadura) y, a la vez, proporcionar la aceleración que se pretenda lograr (par de aceleración). Además, también debe ser capaz de hacer frente a ciertos casos particulares, como la superación de obstáculos o una pendiente [2].
PAR EN EL EJE (RUEDA)= PAR DE RODADURA + PAR DE ACELERACIÓN + PAR DE CASOS PARTICULARES
Se hará un estudio básico sobre los distintos tipos en que se desglosa el par global exigido por las ruedas para conseguir que el vehículo responda de manera satisfactoria. En el plano teórico, este estudio resulta válido tanto para VCI como VE.
Las características propias de cada uno de ellos son las que marcan las diferencias entre ambos.
A la hora de obtener las curvas características de los diferentes pares, el estudio se realizará sobre el siguiente modelo, cuyos datos principales son:
M: Masa del vehículo a plena carga = 300Kg.
R: Radio de la rueda = 0.26m
S: Superficie frontal del vehículo =1.52m2
Cx: Coeficiente de resistencia del aire = 0.33
J: Inercia de las Masas Rodantes = 0.82Kgm2
N: Relación de reducción = 4.5454
Densidad del aire en Bogotá a 20º C =0.8878Kg/m3
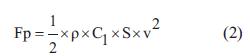
Fuerza de elevación (Fp)
La fuerza de elevación se sitúa en el plano vertical del vehículo, en sentido contrario a la fuerza del peso (P), por lo que la contrarresta. Esta fuerza parece como resultado del efecto aerodinámico producido sobre un vehículo en movimiento. La mayoría de las veces solo se tiene en cuenta el efecto de la resistencia al avance que la aerodinámica provoca, sin embargo en algunos casos resulta interesante el efecto elevador [2].
La fuerza de elevación se calcula mediante la si
Donde:
ρ: Densidad de aire
C1: Coeficiente de elevación
v: Velocidad del vehículo (m/s)
Par de rodadura (Trod)
PAR DE RODADURA = PAR DE FRICCIÓN + PAR AERODINÁMICO
Es el requerido para mantener el movimiento del vehículo. Para ello se necesita vencer tanto la resistencia debida al contacto entre las ruedas y el piso sobre el que avanza (representada por el par de fricción) como la ofrecida por los flujos de aire que rodean al vehículo (representada por el par aerodinámico)

Donde:
M: Masa del vehículo a plena carga (Kg)
g: Aceleración gravitatoria
v: velocidad del vehículo (m/s)
Cosβ: Coseno del ángulo β
ρ: Densidad del aire
Cx: Coeficiente de penetración aerodinámico
S: Superficie frontal del vehículo
R: Radio de la rueda (m)
Par de aceleración (Tacel)
PAR ACELERACIÓN = PAR INERCIAL RUEDAS + PAR ACELERADOR MASA VEHÍCULO
Es el necesario para alcanzar la velocidad requerida. Para conseguirlo se necesita, por parte, vencer la inercia de las masas rodantes y, por otra, disponer de un par suficientemente capaz de acelerar la masa del vehículo.
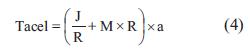
J: Inercia de las masas rodantes (Kgm2)
M: Masa total del vehículo (Kg)
a: Aceleración requerida (m/s2)
R: Radio de la rueda (m)
Par casos particulares: Hasta ahora sólo se han fijado los pares que se deben vencer en una situación básica, es decir, sobre terreno llano (sin pendiente) y liso (sin obstáculos). Sin embargo, estas condiciones mencionadas también pueden aparecer durante una conducción típica y se debe tener en cuenta la aportación extra de par que se hace necesaria.
Par superación de pendientes (Tp): Cuando el vehículo se encuentra sobre una pendiente, el hecho de que la fuerza del peso no sea perpendicular al terreno, hace que aparezca una componente de esta fuerza en la misma dirección del avance por lo que el par requerido será igual a:

Siendo:
M: masa total del vehículo (Kg)
g: Aceleración de la gravedad (9.81m/s2)
Senβ: Seno del ángulo β, que marca la inclinación de la pendiente del terreno.
R: Radio de la rueda (m)
Esta componente adicional actúa de forma diferente según el vehículo esté subiendo o bajando la pendiente: cuando sube, se suma a la fuerza de fricción, es decir, se opone al avance, y cuando baja, se resta, es decir, ayuda al avance.
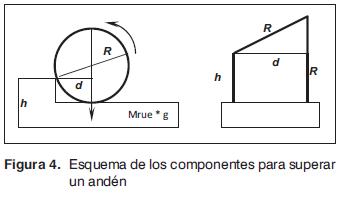
Par de superación de obstáculos en una rueda (Tobs): Cuando el vehículo debe superar un obstáculo, por ejemplo, subir un andén, se necesita un aporte de par extra, debido a la distancia "d" existente entre el punto de apoyo en él anden, sobre el que va a rotar la rueda, y el punto de apli-cación de la fuerza de reacción del peso sobre el suelo, es decir, la componente normal (N = Mrue x g) [3].

Donde:
Mrue: Masa sobre una rueda (Kg)
gg: Aceleración de la gravedad (9.81 m/s2)
h: altura del obstáculo (m)
R: Radio de rueda (m)
En un ciclo de conducción real se incluyen distintos modos de funcionamiento, tales como:
Arranque
Avance a velocidad constante
Aceleración
Superación de obstáculos
Otros
Dependiendo de las condiciones particulares de cada caso, el par de tracción requerido por las ruedas será distinto y para su cálculo se requerirá conjugar los anteriores análisis. De igual manera, de los datos obtenidos de los análisis matemáticos mencionados se puede calcular la autonomía y por ende los consumos en diferentes condiciones de funcionamiento.
4. Resultados
4.1 Componentes mecánicos
Son todos aquellos sistemas que requieren energía mecánica para su funcionamiento y que, en la mayoría de los casos, la trasladan o la transforman en otra clase de energía.
En algunos de los casos no es necesario fabricar cada uno de los diferentes componentes mecánicos que conforman este proyecto, es preciso realizar un riguroso proceso de selección bajo criterios ingenieriles convenientes para cada cuestión en particular [1].
4.1.1 Sistema de dirección
La dirección permite controlar los movimientos del automóvil y es la encargada de trasladar a las ruedas, las maniobras que el conductor hace con sus manos en el volante. Este sistema esta aplicado en las ruedas delanteras aunque algunos modelos disponen de sistemas avanzados en las cuatro ruedas. Básicamente, existen tres tipos de dirección, según la unión existente entre la barra de dirección y las bielas que actúan sobre las ruedas.
4.1.2 Geometría de la dirección
Para asegurar la estabilidad y la facilidad de dirección y reducir al mínimo el desgaste de las llantas, las ruedas delanteras necesitan tener la alineación correcta. Se llama geometría de la dirección a los ángulos interrelacionados entre los ejes, ruedas y otras partes de la suspensión y el bastidor. Los ángulos utilizados son: principio de ackerman y caster.
Principio de Ackerman: Este principio consiste en que solo giran las ruedas, los brazos y los mangos de rueda, en lugar de que gire todo el eje delantero como en los carros de caballos. Bajo este principio, los brazos de dirección están colocados en un ángulo de 100° con el mango de rueda, en lugar de 90°. Con esta colocación la rueda interna gira a un ángulo mayor que la rueda externa al dar una vuelta. Cuando el vehículo avanza en línea recta, las ruedas permanecen paralelas [1].
Angulo de caster: Es la inclinación del eje hacia el frente o hacia la parte de atrás del vehículo. Debido al caster, las ruedas hacen contacto con el camino detrás o adelante del punto de carga del eje. El punto de carga es la línea a lo largo de la cual se aplica la fuerza de gravedad, lo cual produce un efecto de arrastre como el de la carretilla de un mueble, ruedas de carro de mercado, sillas de ruedas, sillas de escritorio y es que fácilmente se puede observar en las orquillas de bicicletas y motos, cuya función es volver las ruedas en la posición recto hacia delante después de que el vehículo ha girado o mantener la dirección del vehículo en línea recta cuando se suelta el volante. Es importante que los ángulos de caster sean los mismos en las ruedas delanteras para evitar inestabilidad en la ruta o en la frenada, el ángulo empleado para esta aplicación
4.1.3 Sistema de suspensión
El sistema de suspensión del vehículo es el encargado de controlar el comportamiento de las ruedas en contacto con el suelo dando seguridad y confort durante la conducción y aportando estabilidad, también, soportan el peso del vehículo, absorben las vibraciones y golpes bruscos y evitan el desajuste o rotura de algunas piezas o mecanismo. Existen diferentes tipos de sistemas de suspensión en dependencia si es delantera o trasera; entre estos están:
- Sistema de suspensión rígida
- Sistema de suspensión de muelles
- Sistema de conexión
- Sistema de barra tirante
- Suspensión trasera de doble brazo con brazo longitudinal
- Suspensión trasera de doble brazo transversal
- Sistema de eje macizo
- Suspensión delantera de cuatro brazos
- Suspensión delantera McPherson
Para el diseño propuesto de este vehículo se utilizó una suspensión constituida por resortes de muelle y espiral que sumadas proporcionan la constante K requerida en el diseño; en conjunto con un amortiguador hidráulico que genera la detención de las oscilaciones de los resortes producidas por la energía absorbida de los impactos.
El sistema de suspensión delantera seleccionado para el diseño del vehículo corresponde a la de tipo rígido utilizada en vehículos de trabajo pesado. Esta se selecciono por ser de fácil diseño, montaje y altas prestaciones al tener un gran rango de desplazamiento en obstáculos de gran altura, además, de tener un bajo peso y reducido costo, prestando su función principal que es el apoyar permanentemente las cuatro ruedas sobre el terreno brindando mayor estabilidad y fácil maniobrabilidad [1].
4.1.4 Sistema de frenos
El propósito general de los frenos es disminuir la velocidad del vehículo para hacerlo controlable o detenerlo en una distancia razonable bajo cualquier tipo de condiciones. Lo que busca el sistema de frenos es conseguir la frenada optima en cualquier tipo de superficies aprovechando al máximo la adherencia que proporcione las ruedas contra la carretera.
Existen básicamente dos sistemas de frenado -de disco y de tambor- de funcionamiento similar. Además del estado del sistema de frenos, el estado de los neumáticos (presión, tipo, estado, etc.), de la amortiguación, del tipo de carretera y asfalto, la velocidad de circulación, la carga y las condiciones climáticas, hacen aumentar o disminuir la distancia necesaria para detener el vehículo; cuanto mayor es la velocidad y menor el tiempo para frenar, mayor trabajo deben realizar los frenos y más alta temperatura alcanzarán. Por tanto, los vehículos de mayor tamaño o que alcanzan mayor velocidad llevarán frenos más grandes.
La configuración del sistema de frenos ensamblado en el vehículo se constituye por sistema de frenos de Tambor ubicados en las dos ruedas traseras por ser estas las que soportan el mayor peso y poseen la tracción del vehículo, accionados mediante cables metálicos que se conectan al pedal de frenado. Este sistema posee dos zapatas de fricción en cada rueda las cuales tienen la característica de ser autoenergizantes dos de ellas y autodesenergizantes las otras dos en cualquiera de los sentidos de giro del eje.
El tambor fue fabricado en fundición gris que es el material comúnmente utilizado para este propósito por sus características particulares como lo son la gran capacidad de absorción de vibraciones y su facultad de auto lubricación presente por el grafito. El tambor, a diferencia de otros vehículos, se encuentra unido a la rueda con el fin de minimizar la masa no suspendida y reducir el peso del vehículo, además, de la facilidad de montaje que presenta [2].
4.1.5 Eje de transmisión
El eje trasero corresponde al elemento de transmisión de potencia y movimiento final a las ruedas, permitiendo la propulsión del vehículo, y sobre el cual va montado un sistema de transmisión por cadena, sistema de tracción diferencial que permite el viraje del auto sin derrape sobre la carretera y un sistema de frenos capaces de detener o disminuir la velocidad del vehículo.
El material que se empleo para el diseño de este elemento fue acero AISI 1045 laminado en frió (calibrado) ya que posee características mecánicas más elevadas y tolerancias geométricas más estrechas. Sobre el mismo eje se pueden montar dos sistemas diferenciales para este proyecto que serian los correspondientes a las conf guraciones de 4X2 o 4X1.
4.1.6 Sistema de transmisión por cadena
Las transmisiones de cadena se utilizan a menudo en casos donde los altos niveles de torque o alta temperatura impiden uso de correas, la transmisión de cadena es una solución económica. Una cadena de acero puede operar y resistir muchos ambientes hostiles de carácter químico o térmico (pero no en todos).
Las características básicas de las transmisiones de cadena incluyen una relación constante de velocidad, puesto que no hay resbalamiento o estirado; larga vida o duración y la capacidad para impulsar cierto número de ejes desde una sola fuente de potencia o fuerza motriz.
Las cadenas de rodillos rara vez fallan por deficiencia en la resistencia a la tensión, más bien debido a que se les somete a un gran número de horas de servicio. Las fallas reales pueden deberse a la falla de los rodillos en los pasadores o a fatiga en la superficie de los rodillos. Estas han sido estandarizadas por el ANSI en lo relativo a tamaños; para este proyecto se utilizó la número 40 [2].
4.1.7 Sistema diferencial de tracción
El sistema diferencial de tracción de velocidades le permite a una rueda de tracción del vehículo, girar a una velocidad diferente a su rueda opuesta, cuando el vehículo se encuentra realizando un giro; durante esta maniobra, la rueda motriz que se encuentra externa al radio de giro tiene una velocidad mayor que la rueda que se encuentra interna.
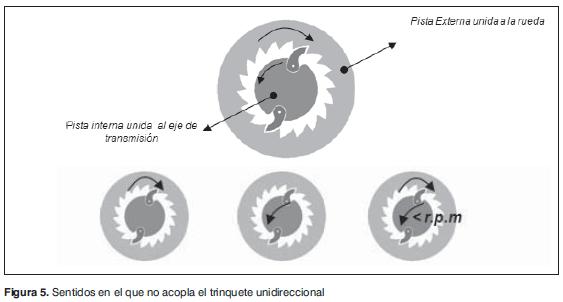
El funcionamiento del diseño único e innovador propuesto como sistema diferencial de tracción para este proyecto, consiste en un eje (de transmisión) que se acopla a las dos ruedas motrices mediante trinquetes o embragues unidireccionales montados sobre tuercas de diseño especial.
Cuando el vehículo realiza un giro, la rueda que se encuentra externa al radio de giro se desacoplará del trinquete por llevar esta una velocidad mayor que la del eje, el cual se encuentra aun acoplado a la rueda interna que lleva su misma velocidad, una vez el vehículo termine de realizar el giro, las velocidades de las ruedas se igualaran y la transmisión de potencia del eje hacia las ruedas se hará de forma simultánea.
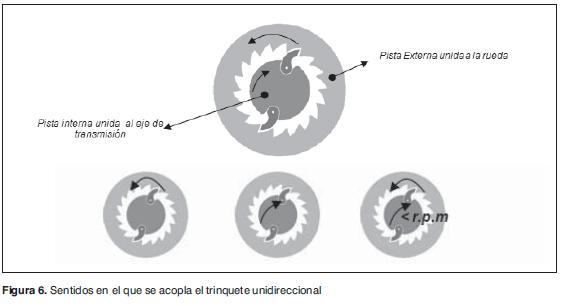
Esta disposición de sistema diferencial le permite tener al vehículo tracción en dos de las cuatro ruedas (4 x 2).
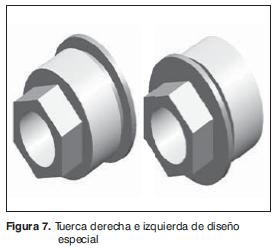
Las sistema diferencial fue planteado como alternativa diferente al comúnmente sistema diferencial de velocidad satélite planetario, el cual posee cuatro engranajes lo que genera perdida de potencia, mayor peso y mayor costo de fabricación, este diseño se diferencia del tradicional ya que se compone de solo dos trinquetes unidireccionales y dos tuercas de diseño especial las cuales se encuentran unidas por medio de rosca sobre los trinquetes una para la rueda derecha y otra para la rueda izquierda. El material de esta fabricación es acero aleado para temple y revenido AISI /SAE 4340.
Cabe notar que este novedoso diseño presenta una serie de ventajas como:
- Un menor peso por requerir menos elementos mecánicos para su funcionamiento.
- la relación de transmisión es siempre constante cuando el auto avanza en línea recta o cuando gira, a diferencia del sistema diferencial común el cual cambia su relación de transmisión.
- el vehículo no permitirá el deslizamiento de una rueda mientras la otra se queda inmóvil.
Sin embargo, también posee la desventaja que debido al sistema de acople unidireccional, el movimiento inercial del auto no se transmitirá al eje impidiendo que se genere carga regenerativa a la vez que no permitirá tener marcha atrás (cuando esté funcionando como 4X2).
Sobre este vehículo también se puede disponer de un sistema de tracción 4x1 el cual supera las desventajas del sistema 4x2.
4.2 Tren delantero
Es la parte del bastidor encargada de sostener y soportar las cargas y esfuerzos ejercidos en las ruedas delanteras, además de llevar la caja de la dirección y servir de elemento de giro con respecto al bastidor cuando el vehículo se encuentre en un desnivel de terreno con respecto a las ruedas traseras. El movimiento de giro o compensación de nivel se logra con un tornillo que sirve de eje entre el bastidor y el tren delantero ubicado en la mitad de forma horizontal con respecto al piso, el cual soporta toda la fuerza a cortante ejercida por las ruedas delanteras, El tren delantero hace parte de la suspensión delantera del vehículo del tipo "rígida". El material utilizado en este diseño corresponde a un perfil laminado en frío (ColdRolled ASTM A-366) de sección rectangular hueco con un grosor de pared de 1.21mm (Calibre 18).
4.2.1 Chasis
El chasis o bastidor es el armazón sobre el que se montan y sujetan todos los mecanismos, soportando el peso de unos (motor, variador, baterías, etc.) y quedando otros colgados de él (suspensión y ruedas). La carrocería esta unida al chasis y se destina al transporte de pasajeros y carga.
4.2.2 Carrocería
En el diseño de la carrocería del vehículo, se evalúan una serie de parámetros que influirán de manera directa en sus futuras prestaciones: seguridad, aerodinámica peso y ergonomía. Para este caso la estructura de la carrocería se basa en una serie de tubos doblados con respecto a la geometría del vehículo que sirven para proteger al conductor en caso de un accidente, también se emplearán como soporte para dispositivos de control, luces, cinturones de seguridad, entre otros [4].
4.2.3 Sillas
Las sillas son el elemento que sustentan el peso de los pasajeros y brindan una posición confortable para la conducción del vehículo permitiendo al conductor tener todas las facultades necesarias para operar de forma satisfactoria y segura.
El conjunto de los dos asientos acoplados por tubos reforzados, viene montado sobre dos rieles horizontales que le permite deslizarse uniformemente para variar o ajustarse a las dimensiones antropométricas de los pasajeros, estos rieles corresponden a la silla de un vehículo Renault Twingo.
4.2.4 Ruedas
Las ruedas constituyen la masa no suspendida de un vehículo, es decir, el punto de apoyo del automóvil sobre el suelo. Sus pequeñas zonas de contacto con el piso soportan el peso del vehículo y de su carga, lo sujetan al suelo para resistir esfuerzos laterales y absorben las vibraciones que las pequeñas desigualdades del terreno causarían al vehículo, a la vez transmiten la fuerza del motor en el avance y la de los frenos en las paradas.
4.3 Componentes eléctricos
Los componentes eléctricos son todos aquellos que utilizan la electricidad para permitir la acción a otros dispositivos mediante la conversión de energía o su propio funcionamiento.
4.3.1 Motores eléctricos
El motor eléctrico es el que se encarga de transformar la energía eléctrica, almacenada en las baterías, en energía de tracción. Su unión a la rueda se hace de forma directa a través de un sistema diferencial.
Existen diferentes tipos de motores que podrían adaptarse perfectamente a las necesidades de un VE entre los que están:
Corriente continua:
- Motor serie
- Motor c/c de excitación independiente
Corriente Alterna:
- Motor asíncrono (de inducción)
- Motor síncrono
- Motor de reluctancia conmutada
· De roto bobinado
· De imanes permanentes (brushless)
La Figura 8. permite realizar una comparación en cuanto a la eficiencia que ofrecen los distintos tipos de motores, así como la electrónica asociada a ellos.
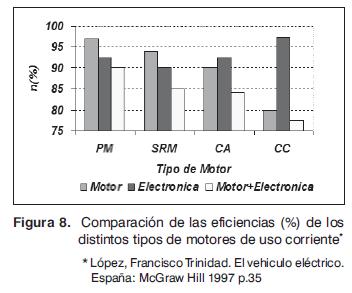
El motor AC de inducción Asíncrono de 2000W a 24V, se ha seleccionado para este proyecto por las características técnicas, económicas y comerciales que presenta; la suma de la adquisición del motor y la electrónica de regulación son de elevada eficiencia, de costos moderados y de sencilla obtención.
4.3.2 Baterías
Una batería es un dispositivo electroquímico el cual almacena energía en forma química. Cuando se conecta a un circuito eléctrico, la energía química se transforma en energía eléctrica.
La tecnología puede variar según las diferentes necesidades existentes. Las baterías se clasifican en grupos según el uso que estas tengan y por su diseño. Las diferencias principales entre estos grupos se dan por la estructura y diseño de los electrodos (ó placas), el material activo y el electrolito entre las cuales se encuentran:
- Baterías Estacionarias
- Baterías de Arranque o automotrices
- Baterías traccionarias
Las baterías de tracción son las utilizadas para carretillas elevadoras, sillas de ruedas eléctricas y automóviles eléctricos; estas son las ideales para el uso en este vehículo. Estas baterías están sujetas a una constante y relativamente pequeña descarga, durante largos periodos de tiempo, lo que supone un alto grado de descarga. Hay que procurar recargarlas, preferiblemente de 8 a 16 horas cada día antes de que se vuelvan a descargar.
Existen muchos tipos de baterías, la mayoría de última tecnología pero de elevados costos, en general las baterías de plomo (electrodo) acido (electrolito) son las más utilizadas en la mayoría de vehículos eléctricos por su fácil adquisición y bajo costo, razones por la cual fueron implementadas en este proyecto [1].
4.3.3 Convertidores de potencia
Para conseguir un funcionamiento en un rango de velocidades, debemos variar el valor medio de la corriente del motor. Para ello, se dispone, entre las baterías y el motor, un montaje de semiconductores que actúan modificando de forma periódica las conexiones entre la fuente de tensión continua y el motor. Este montaje se denomina Chopper o regulador.
Para el motor asíncrono de 2KW que se utilizará para el vehículo, el inversor más adecuado ofrecido por esta casa es INVERTER AC-1 con las siguientes características:

- - Tensión de alimentación 24-48V DC
- Corriente máxima (1):
- 250ARMS (Corriente de Booster 300ARMS por 5 sec.) 24-36V
- 180ARMS (Corriente de Booster 200ARMS por 5 sec.) 48V
- Dimensiones: 150 x 210 x 74 mm
- Conector serie RS232
- Comunicación CAN-BUS
- Memoria Flash -EEprom
- Indicador de batería interno
- Cuentahoras interno -Protección IP64
- Para motores Asynchronous hasta 2,5Kw
- Fabricado conforme a la normativa CE
4.3.4 Tecnologías auxiliares y sistemas de control
En un automóvil, además de los componentes elementales de tracción, se dan cita una serie de tecnologías auxiliares y sistemas de control que los complementan. Algunas de ellas resultan necesarias para el funcionamiento del vehículo (sistemas de aceleración, frenado, alumbrado, etc.), otras sirven para ofrecer información al usuario (tablero de instrumentos) y otras se presentan como una opción de confort. Algunas de las instaladas en este vehículo son:
- - Control de estado de la batería
- Indicador de velocidad y desplazamiento
- Indicadores estándar de luces
- Indicadores de alarmas
- Consola de programación
- Pedal acelerador
4.3.5 Sistema fotovoltaico
El interés general por la energía solar se ha acrecentado en los últimos años. Se trata de la más atractiva de las fuentes energéticas alternativas del futuro, no solo por ser limpia y gratuita, sino también por su abundancia y su carácter inagotable a escala humana. Es por esto que se propuso lograr un auto eléctrico alimentado por energía solar [5].
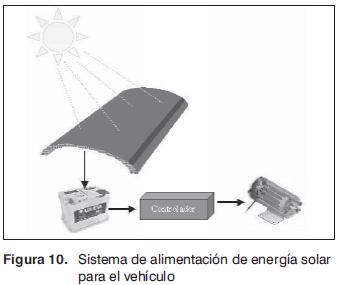
La estructura del sistema fotovoltaico para el vehículo alimentado por medio de energía solar se basa de los siguientes componentes:
La energía del Sol se convierte directamente en electricidad por las celdas solares, esta electricidad es almacenada en baterías. Un controlador recibe la energía de las baterías y mueve un motor.
Para el caso de este VE se plantea la posibilidad de realizar la distribución del vehículo con sus respectivos paneles solares dispuestos en los tejados de las casas y su carga sea para un banco de baterías en un tiempo de cuatro horas, posteriormente se pretenderá montar una infraestructura de estaciones de recarga rápida donde el tiempo de recarga será menor y existirá una cantidad de baterías ya cargadas con el fin de hacer un cambio rápido a los VE [5].
4.4 Prototipo final
En las Fig. 11 y 12, se muestra el resultado final de este proyecto de investigación.


5. Conclusiones
El diseño y construcción de un auto eléctrico alimentado por energía solar responde a numerosas necesidades y dificultades presentes en muchas de las ciudades del mundo ya que ofrece soluciones al congestionado tráfico que presentan las principales vías vehiculares, a la creciente contaminación ambiental y a las agotables fuentes de energía fósiles. Además de servir como plataforma tecnológica para el desarrollo de nuevos sistemas, conjuntos y mecanismos que permitan el desarrollo de autos eléctricos solares en Colombia, que hasta el momento es una tecnología nula en el país.
La importancia de este proyecto está dada en la ejecución de diferentes áreas y disciplinas de trabajo. La construcción de un automóvil requiere de la aplicación de la mayoría de los conocimientos mecánicos ingenieriles; la concepción de un sistema eléctrico de propulsión solicita la ampliación del conocimiento en áreas especificas de la electrónica y la electricidad y la aplicación de la energía solar, como fuente de alimentación del sistema propulsor, concibe la aplicación y empleo de los últimos estudios en los que están puesto el interés de los investigadores y científicos en la actualidad no solo para la adaptación en automóviles sino para la implantación en cada uno de los requerimientos del hombre social. Además de la utilización de software de diseño mecánico y análisis por elementos finitos de última tecnología.
Referencias
[1] P. E. Larrode, "Automóviles eléctricos". Zaragoza: Reverté, 1999. [ Links ]
[2] F. López, "El vehículo eléctrico: Tecnología, desarrollo y perspectivas de futuro". España: Aravaca, 1997. [ Links ]
[3] R. Norton, "Diseño de máquinas". México: Pearson, 1999. [ Links ]
[4] CIA. General de aceros. "Catalogo interactivo de productos". Bogotá: Cia. General de aceros, 2003 [ Links ]
[5] J. P. Braun, B. Faragai, A. Laboured. "Celdas solares: Electricidad luminosa y sus campos de aplicación" México: Trillas, 1999. [ Links ]

