










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkTecnura
versão impressa ISSN 0123-921X
Tecnura vol.19 no.spe Bogotá dez. 2015
https://doi.org/10.14483/udistrital.jour.tecnura.2015.SE1.a04
http://dx.doi.org/10.14483/udistrital.jour.tecnura.2015.SE1.a04
Concepto de robot humanoide antropométrico para investigación en control
Anthropometric humanoid robot concept for research in control
Fredy Hernán Martínez Sarmiento1, Edwar Jacinto Gómez2, Diego Alexander Zárate Díaz3
1 Ingeniero Electricista, Especialista en Gestión de Proyectos de Ingeniería, Ph.D.(c) en Ingeniería Sistemas y Computación, Docente de la Universidad Distrital Francisco José de Caldas, Bogotá D.C., Colombia. Contacto: fhmartinezs@udistrital.edu.co
2 Ingeniero en Control Electrónico e Instrumentación, Magister en Ciencias de la Información y Comunicaciones, Docente de la Universidad Distrital Francisco José de Caldas, Bogotá D.C., Colombia. Contacto: ejacintog@udistrital.edu.co
3 Ingeniero en Electricidad, Consultor independiente, Bogotá D.C., Colombia. Contacto: dalexanderzarate@gmail.com
Fecha de recepción: 14 de noviembre de 2014 Fecha de aceptación: 18 de agosto de 2015
Cómo citar: Martínez Sarmiento, F. H., Jacinto Gómez, E., & Zárate Díaz, D. A. (2015). Concepto de robot humanoide antropométrico para investigación en control. Revista Tecnura, 19, 55-65. doi: 10.14483/udistrital.jour. tecnura.2015.SE1.a04
Resumen
Para la futura investigación sobre el control de la marcha pasiva/activa, se representa en este artículo un prototipo mecánico de un robot antropomórfico bípedo que consta de 10 DOF (grado de libertad). Partiendo del concepto de que un robot que trabaje e interactúe con el ser humano debe interactuar con ambientes diseñados para el ser humano, se propone un diseño mecánico de robot bípedo inspirado en proporciones humanas. Dado que el propósito de este prototipo es el desarrollo de esquemas de control, el perfil de diseño se complementa con la selección de parámetros que faciliten el trabajo en laboratorio, como son tamaño, materiales y actuadores. Durante el desarrollo, se logra concretar el diseño de la estructura bípeda a partir de los criterios de diseño y de las conclusiones obtenidas a partir del análisis de diseños robóticos similares a nivel nacional e internacional. El diseño final se desarrolló en SolidWorks, y su dimensionamiento mecánico se afinó a partir de simulaciones dinámicas en MatLab.
Palabras clave: diseño estructural, locomoción humana, robot bípedo.
Abstract
For the further research on passive/active walking control, an anthropomorphic mechanical prototype for a bipedal robot consisting of 10 DOF (degree of freedom) is represented in this article. Based on the concept that a robot that works and interacts with humans must interact with environments designed for humans, we propose a biped robot mechanical design inspired by human proportions. Since the purpose of this prototype is to develop control schemes, the profile of design is complemented by the selection of parameters to facilitate laboratory work, such as size, materials and actuators. During development, we managed to specific the biped structure design from design criteria, and the conclusions reached from the analysis of robotic designs related nationally and internationally. The final design was developed in SolidWorks, and the mechanical dimensioning was tuned from dynamic simulations in MatLab.
Keywords: bipedal robot, human locomotion, structural design.
Introducción
Por muchos años se ha sostenido que para una completa incorporación de los robots en la vida cotidiana del ser humano, lo óptimo es que estas máquinas posean esquemas de interacción similares a las humanas; esto incluye estructura morfológica, desplazamiento con patas, implementación de sensores que dupliquen las capacidades de los sentidos humanos, y la capacidad de acción equivalente (movimientos humanos) (Bergren, 2003).
El diseño morfológico del ser humano ha probado ser óptimo y altamente eficiente, no es gratuito el proceso evolutivo que lo refinó y le permitió sobrevivir en la Tierra desde hace 65 millones de años (Martínez, & Delgado, 2010). La locomoción por patas, y de estas la locomoción bípeda, significa un ahorro de energía que a la vez deja libre dos extremidades para poder realizar trabajos, hecho que tuvo un efecto fundamental en el desarrollo del ser humano.
El área de los robots bípedos es sin duda una de las de mayor investigación a nivel mundial, dado que constituye en sí un paradigma en cuanto a sistemas complejos y, por tanto, frontera de investigación. Dentro de este proceso existe la necesidad de disponer de una plataforma para su uso tanto en docencia como en investigación, a fin de lograr generar conocimiento propio en esta área. Es de particular interés el desarrollo de aplicaciones de control inteligente de agentes autónomos y algoritmos de inteligencia colectiva (Russell, & Norvig, 2002).
El artículo se organiza en la siguiente forma. La sección 2 presenta algunos antecedentes teóricos de diseño considerados como punto de partida y experiencias previas por considerar. La sección 3 presenta formalmente el diseño del prototipo bípedo y su simulación mecánica. Esta sección incluye no solo la geometría, sino también la selección de materiales y la definición de los DOF. La sección 4 presenta el prototipo y cada una de sus principales estructuras: la rodilla, el tobillo y la cadera. Finalmente, la sección 5 concluye el artículo.
ANTECEDENTES TEÓRICOS DEL DISEÑO
Por siglos el ser humano ha construido máquinas que imitan el cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a estatuas de dioses, los griegos construyeron estatuas que operaban con sistemas hidráulicos. El inicio de la robótica actual puede fijarse en la industria textil del siglo XVIII. Durante los siglos XVII y XVIII en Europa se construyeron muñecos mecánicos muy ingeniosos que tenían algunas características de robots. Jacques de Vauncansos construyó varios músicos de tamaño humano a mediados del siglo XVIII, esencialmente se trataba de robots mecánicos diseñados para diversión. En 1805 Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos, en la cual una serie de levas eran el sistema principal de control para que esta pudiese escribir y dibujar (Lui, Jiming, Wu Jianbing, 2001).
Los robots humanoides encontrados hoy día suelen carecer de la capacidad para operar en en-tornos no estructurados y desconocidos. Sensores de fuerza y control en cada unión del robot permitiría que este actuara con seguridad en estos entornos; sin embargo, estas características son difíciles de incorporar en los diseños, a tal punto que los prototipos actuales no pueden competir en capacidad de manipulación frente a un niño pequeño (Gupta, & Srivastava, 2006).
En la actualidad, la investigación y desarrollo de la robótica, más específicamente en el caso de robots bípedos, es muy amplia. Existen casos interesantes que vale la pena mencionar para esta investigación, que han servido de referente para el diseño propuesto. También se han tomado como referentes los criterios de pruebas internacionales como la RoboCup, y esquemas de diseño como el Hombre de Vitruvio, de Leonardo da Vinci.
Robot BIP (Biped Robot)
Este fue un proyecto realizado en Francia en el Instituto de Investigación en Informática y Automatización, INRIA (http://www.inrialpes.fr/bipop/) (Herdt, Diedam, Wieber, Dimitrov, Mombaur, & Diehl, 2010, pp. 719-737). Básicamente el proyecto consistió en crear un prototipo que recreara la parte inferior del cuerpo humano. Este robot consta de pelvis, tronco, dos piernas y sus respectivos pies, y fue diseñado con 15 articulaciones activas y dos pasivas, emulando en ellas torques similares a los producidos por un ser humano (figura 1). Este diseño sirvió de orientador en la estructura robótica de las extremidades inferiores.

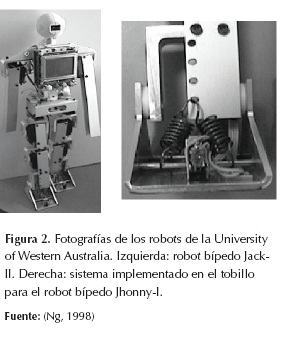
El robot bípedo Jhonny-I y Jack-II (University of Western Australia)
Otra fuente de inspiración para la estructura bípeda en el diseño incluye los desarrollos mostrados por la University of Western Australia. Estos robots se construyeron a partir de 1999, y cuentan con un movimiento generado mediante nueve grados de libertad, seis en el eje imaginario X (producidos por las articulaciones de los tobillos, rodillas y cadera), dos en el eje Y (debido a la rotación de cadera en ese eje) y uno en el eje Z, también generado en la cadera (figura 2).
LIMBO-plataforma bípeda
Este fue un proyecto realizado en Colombia por la Universidad Javeriana en el año 2006 (Vanegas, y Santacruz, 2006). El objetivo principal fue construir una plataforma bípeda que tuviera seis grados de libertad. La importancia de este trabajo para la investigación radica en que en principio el proyecto realiza un estudio detallado de las fases de caminado del ser humano, además de estudiar detalladamente el papel de cada articulación y componente del movimiento humano al caminar. Este estudio fue clave a la hora de seleccionar las articulaciones del prototipo (figura 3).

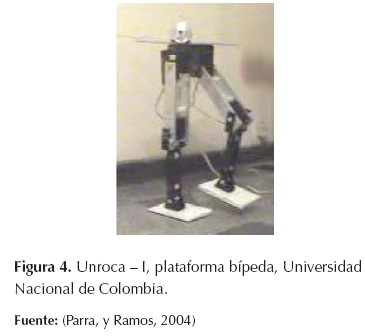
Robot caminador Unroca-I
Otro antecedente importante en el estudio del proceso de caminata humana lo plantea el desarrollo del robot bípedo caminador Unroca-I, de la Universidad Nacional de Colombia (Parra, y Ramos, 2004). Si bien la concepción de este robot no se sustentó en la de un sistema autónomo (utiliza un soporte y contrapeso para el proceso de caminata), sí planteó elementos importantes del proceso como tal en lo relacionado con los componentes necesarios para ser implementados en el robot: el contrapeso, el tipo de actuador, las articulaciones y la forma del pie, todos enfocados al proceso de la caminata (figura 4).
RoboCup
Las dimensiones físicas de construcción del robot presentadas en la investigación se establecieron siguiendo los lineamientos de investigaciones internacionales. En particular, se observaron muy de cerca los criterios de diseño planteados en la liga kid-size de la RoboCup (http://www.robocup.org), de acuerdo con la actualización más reciente de las reglas para competencia (RoboCup Soccer Humanoid League Rules and Setup for the 2013 competition). Dicho cuerpo debe constar de dos piernas, dos brazos y una cabeza, la cual debe estar sujeta al tronco del robot (figura 5).
El Hombre de Vitruvio
A fin de complementar los criterios de diseño morfológico del robot, se consideró también el Studio (Real Academia de Venecia) o, como también se conoce, El Hombre de Vitruvio, de Leonardo da Vinci (Cox, 1999). Este trabajo fue desarrollado por da Vinci en su búsqueda de una visión del hombre como centro del universo, al quedar inscrito en un círculo y un cuadrado (figura 6).
DISEÑO Y SIMULACIÓN MECÁNICA
Dimensiones establecidas para el diseño del prototipo
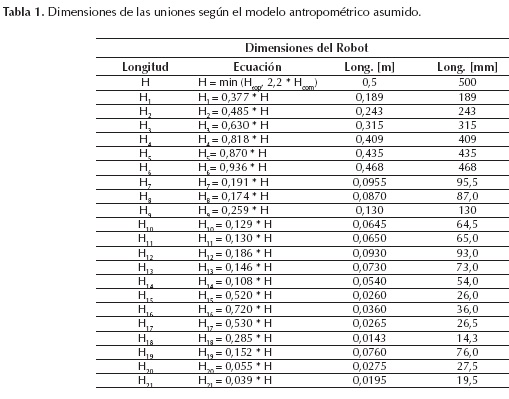
De acuerdo con los diseños humanoides previos, a las características del Hombre de Vitruvio tomadas como referente ideal del cuerpo humano, y las restricciones vistas en las reglas de la RoboCup, se establecen las dimensiones para el diseño del prototipo (ecuación (1))

La altura total (Htotal) se calcula para participar en la categoría kid-size. Para establecer este parámetro fue necesario tener en cuenta aspectos como el diseño de cada una de las articulaciones, y los actuadores utilizados para generar el movimiento en cada juntura. Es necesario establecer el punto de ubicación de cada actuador, y el espacio que va a ocupar en toda la estructura. También es de suma importancia establecer la forma y dimensiones de cada uno de los eslabones que conforman el robot; con todos estos aspectos claros, se optó por establecer para el robot una altura total de 50 cm.
Tomando esta longitud como base, se puede calcular cada una de las dimensiones características del robot. El modelo antropométrico del ser humano asumido en este trabajo ha sido ampliamente evaluado e implementado en distintos modelos de robots bípedos; en la figura 7 se puede observar dicho modelo (Parra, Ramos, 2004, Contreras, 2004).
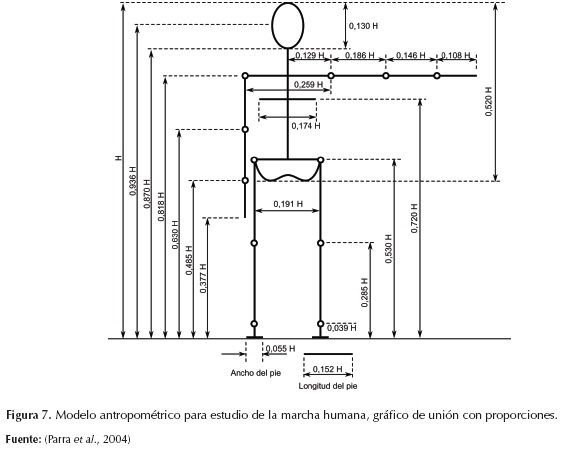
Para calcular cada una de las dimensiones de la figura 7 se utilizó el factor multiplicativo de cada longitud. En la tabla 1 se puede observar el detalle de las dimensiones seleccionadas para cada sección.
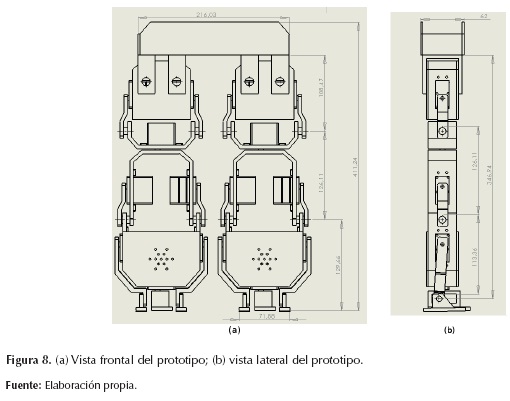
Vistas geométricas del bípedo
A partir del diseño dimensional se efectúa el diseño geométrico del prototipo en SolidWorks. A continuación, en las figuras 8(a) y 8(b) se puede observar las vistas geométricas del primer prototipo bípedo, en las cuales se identifica cada una de las distancias respectivas en los puntos de rotación de las articulaciones.
Selección del material de la estructura
Como criterios de selección del material se consideró:
- Materiales livianos, económicos, de buena calidad y, lo más importante, adecuados para la labor que van a cumplir, y que garanticen resistencia y buena estabilidad.
- En lo posible, dejar múltiples ejes de rotación, y ubicar los motores adecuadamente para garantizar el centro de masa lo más alto posible.
Se decidió inicialmente utilizar aluminio como material principal para la estructura del robot, debido a que brinda grandes ventajas frente a otros materiales, entre las cuales están la disponibilidad, buena manipulación, y principalmente por ser ligero y resistente. Sin embargo, la primera versión del prototipo presentó bordes cortantes, lo que generó riesgos de manipulación. Además, la presentación estética visual no resultó agradable, y conformaba una caja negra para el usuario.
Como material de la versión final del prototipo se seleccionó metacrilato transparente (acrílico) de 3 mm de espesor. Este nuevo material eliminó el problema de riesgo de corte, así como la presentación estética. El material seleccionado es translúcido, lo que permite además observar directamente sus actuadores.
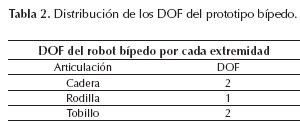
Elección de grados de libertad (DOF)
Los grados de libertad generados por el prototipo son 10 en total, y se dividen por cada articulación de acuerdo con la tabla 2.
Simulación mecánica del sistema
De acuerdo con el perfil, se calculó por medio de la plataforma SolidWorks los esfuerzos mecánicos y momentos de inercia para cada una de las articulaciones, asumiendo aluminio y metacrilato en su construcción y formas uniformes y simétricas, de acuerdo con las dimensiones físicas del robot detalladas en la tabla 1. Con estos resultados, se procedió a simular el modelo mecánico en SimMechanics de MatLab para obtener información sobre las exigencias mínimas de torque en cada unión, proyectando de esta manera el tamaño para cada motor del prototipo.
Es pertinente aclarar que los valores obtenidos corresponden únicamente a exigencias mínimas de acuerdo con las necesidades de locomoción del robot, pero las selecciones finales de motores corresponden a valores que superan estos datos de cuatro a seis veces, a fin de dar suficiente capacidad al prototipo (Reznik, 1997, McComb, Predko, 2006).
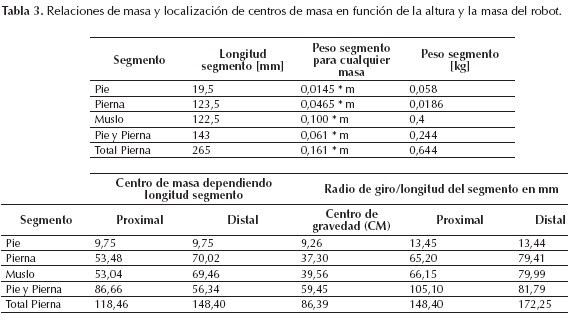
En la tabla 3 se puede apreciar los valores obtenidos de acuerdo con las dimensiones y masa del robot, la cual se estima en 4 kg. Estos datos sirven de referencia para calcular los valores previos a la selección del motor en SimMecnanics (Marghitu, 2009).
A cada uno de los bloques que conforman la estructura total del programa se le deben ingresar valores como: centro de masa, posición inicial, grados de libertad, momento de inercia. Para la generación de los movimientos rotacionales se utilizarán los bloques actuadores, en la librería Sensors y Actuators de SimMechanics, que permiten caracterizar parámetros como la velocidad y aceleración.
PROTOTIPO
Estructura mecánica de la rodilla
El movimiento generado en la articulación de la rodilla se desarrolla en el plano transversal. La implementación de este movimiento se efectúa a través de dos servos stuados en las partes laterales de la estructura. Se optó por esta estrategia para evitar el inconveniente visto en otros trabajos, en donde se utilizaba un servo acoplado directamente a un lado de la estructura, lo que somete al eje de salida a un esfuerzo de flexión grande por el exceso de peso en un solo punto de la estructura. Utilizar dos servomotores garantiza una mejor distribución del peso. Otra ventaja es la estabilidad que adquiere toda la estructura, dado que la distribución del peso estará equitativamente en toda la estructura, lo cual es muy importante cuando el robot se encuentra en su fase de soporte único (figura 9).
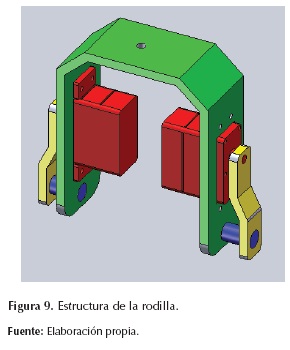
Otro detalle de gran relevancia en este diseño es que, a diferencia de otros diseños consultados, no existe conexión directa del eje de salida del servomotor a la articulación de rotación de la rodilla. Optar por implementar un eslabón de conexión entre el eje de salida y el eje de rotación garantiza reducir grandes esfuerzos de flexión generados durante la rotación de la estructura. En la mayoría de los servos comerciales el diámetro del eje de salida y la longitud son relativamente pequeños, por esta razón las cargas en estos puntos no deben ser muy grandes. Implementar un eslabón de conexión entre estos dos puntos soluciona este problema, la mayoría de los esfuerzos se transmiten a esta pieza.
Estructura mecánica del tobillo
El diseño realizado para la articulación del tobillo cuenta con dos grados de libertad, de acuerdo con consideraciones del modelo; uno de ellos será la rotación que podrá realizar en el plano transversal al igual que el movimiento generado en la rodilla, y el otro estará en el plano sagital. La mayoría de los trabajos nacionales solamente establecían un DOF para esta articulación; implementar otro grado de libertad incrementa la dificultad en el diseño mecánico y complica significativamente la estructura del control por utilizar para la estructura.
En la figura 10 se muestra el prototipo ensamblado en acrílico de la estructura del tobillo junto con el pie. Este diseño semeja características propias del ser humano; por ejemplo, el eje de rotación de la articulación se dispuso totalmente descentrado del pie casi alineado a su cara posterior; es de notar que si se verifica en el modelo antropométrico, el cuerpo humano tiene una configuración similar. Para generar el movimiento de la articulación del tobillo en el plano transversal se implementaron dos servomotores. Sus ejes de salida están completamente alineados y la generación del movimiento deberá ser en total sincronía para garantizar el desplazamiento simultáneo de los dos eslabones localizados cada uno en la vista lateral derecha y lateral izquierda de la estructura.

El grado de libertad adicional ubicado en el plano sagital estará controlado por un servomotor adicional, el cual está acoplado a un soporte mecánico; dicho soporte servirá como eslabón de transmisión entre el eje de salida del servo y la planta del pie.
Debido a la complejidad del diseño estructural de esta articulación, para establecer un grado de libertad nuevo el diseño contempla una restricción para realizar este movimiento. El control del servomotor situado en la cadera para generar este mismo movimiento en la parte superior de la estructura deberá estar en completa sincronía con el servo ubicado en el tobillo; esta acción garantiza una rotación simultánea de las dos articulaciones, algo que no es muy diferente a lo ocurrido en las mismas articulaciones del cuerpo humano.
Estructura mecánica de la cadera
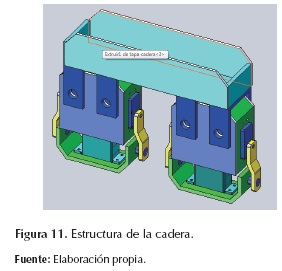
La cadera contará básicamente con los mismos dos grados de libertad generados en el tobillo. Para realizar la rotación en el plano transversal se usarán dos servomotores situados cada uno a un lado de la estructura de soporte, como se puede observar en la figura 11. Al igual que en las articulaciones de la rodilla y el tobillo, los ejes de salida están alineados con un eslabón de conexión, lo que hace que el principio de funcionamiento sea el mismo para los tres.
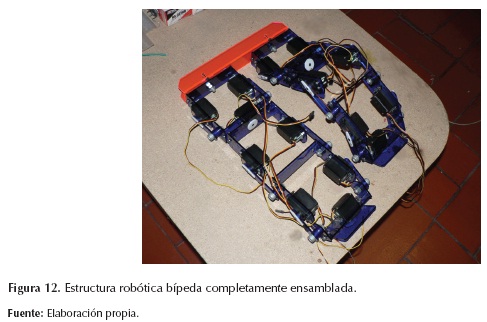
La figura 12 muestra el prototipo en acrílico completamente ensamblado. Los 10 DOF se implementan con un total de 16 servomotores.
Conclusiones
Este trabajo presenta el diseño de un robot bípedo para ser implementado por parte del grupo de investigación ARMOS para el desarrollo de aplicaciones de control inteligente. Se logró un diseño satisfactorio de un robot humanoide de acuerdo con las proporciones propias del ser humano, teniendo en cuenta criterios de optimización de peso, soporte mecánico, capacidad de desplazamiento y tamaño de las secciones, respetando las medidas máximas y mínimas iniciales, así como realimentando investigaciones previas en el área, tanto nacionales como internacionales.
De acuerdo con el perfil inicial y el desempeño y características reportadas por robots similares, se hizo una determinación coherente de los grados de libertad para el funcionamiento de cada una de las articulaciones del robot. De acuerdo con esto, y con el estudio realizado de las posibles articulaciones por implementar, se calculó mediante la plataforma SolidWorks los esfuerzos mecánicos, momentos de inercia, para cada una de las articulaciones, según las dimensiones físicas propias del robot. Con estos resultados se procedió a simular el modelo mecánico en SimMechanics de MatLab para obtener información sobre las exigencias mínimas de torque en cada unión, proyectando en esta forma el tamaño más adecuado para cada motor del prototipo.
Durante el diseño se consideraron parámetros importantes relacionados con la dinámica del cuerpo humano y la marcha, lo que afectó la concepción de la estructura.
Referencias
Bergren, C. M. (2003). Anatomy of a Robot. TAB Robotics, McGraw-Hill. New York. [ Links ]
Martínez, F. H. & Delgado, A. (2010). Hardware Emulation of Bacterial Quorum Sensing. Lecture Notes in Computer Sciences LNCS, International Conference on Intelligent Computing, China. [ Links ]
Russell, S. & Norvig, P. (2002). Artificial Intelligence: A Modern Approach. Second Ed. Pearson- Prentice Hall. [ Links ]
Lui, Jiming, Wu Jianbing (2001). Multi-Agent Robotics System. USA: CRC. [ Links ]
Gupta, P., Tirth, V. & Srivastava, R. K. (2006). Futuristic Humanoid Robots: An Overview. Industrial and Information Systems. First International Conference. 8-11 Aug. 2006. [ Links ]
Herdt, A., Diedam, H., Wieber, P. B., Dimitrov, D., Mombaur, K., & Diehl, M. (2010). Online Walking Motion Generation with Automatic Foot Step Placement. Advanced Robotics, 24. [ Links ]
Hg, J. (1998). An Anthropomorphic Bipedal Robot. University of Western Australia. [ Links ]
Vanegas, C., y Santacruz, C. (2006). LIMBO-Plataforma bípeda. Tesis de grado, Pontificia Universidad Javeriana, Colombia. [ Links ]
Parra, C., y Ramos, C. (2004). Desarrollo y Optimizacion del Robot Caminador UNROCA - I. Tesis de grado. Universidad Nacional de Colombia. [ Links ]
Cox, S. (1999). Diccionario del Código Da Vinci. EDAF. [ Links ]
Contreras, L. (2004). Modelamiento de la Marcha Humana por Medio de Gráficos de Unión. Tesis de grado. Universidad Nacional de Colombia. [ Links ]
Reznik, L. (1997). Fuzzy Controllers. Newnes. [ Links ]
McComb, G., & Predko, M. (2006). Robot Builder's Bonanza. USA: McGraw-Hill Companies. [ Links ]
Marghitu, D. (2009). Mechanism and Robots Analysis with MATLAB. USA: Springer-Verlag London Limited. [ Links ]

