











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink
Introducción
Las manos humanas tienen una estructura difícil de imitar con una prótesis robótica debido al número de grados de libertad disponible, el número de músculos que gobiernan sus movimientos, los mecanismos de percepción sensorial y su compleja comunicación con la actividad cerebral. La tarea de agarre de objetos es una de las funciones más complejas a ser reproducida por un sistema robótico, y una de las funcionalidades más importantes que el usuario desea recuperar (Boughdiri et al., 2012). Usando la taxonomía de Napier, el agarre se puede clasificar en dos tipos: poder y precisión; este último ocurre cuando el objeto queda atrapado entre los flexores de los dedos y el pulgar opuesto, y el agarre de poder implica sostener un objeto en la cavidad formada por los dedos flexionados y la palma de la mano, aplicando una contrapresión con el pulgar en el plano de la mano (Napier, 1956). El problema del agarre de objetos con manos robóticas suele dividirse en dos fases: síntesis de agarre, en el cual se estiman los puntos de contacto entre la mano y el objeto, así como también la fuerza que garantice un agarre estable; y ejecución de agarre, la cual se divide a su vez en una fase antes del contacto y una fase después del contacto. Para evaluar el agarre en manos robóticas, se definen métricas de calidad, las cuales se utilizan en la evaluación, comparación y selección de las configuraciones de agarre. En Rubert, León et al. (2017) se utilizan las métricas en la fase de síntesis de agarre, a manera de guía en algoritmos de planificación de agarre. En otros casos se implementan las métricas en la evaluación de diferentes aspectos de las manos robóticas, como la ubicación de puntos de contacto, o fuerzas de contacto frente a perturbaciones y manipulación del objeto (Rubert y Morales, 2016). En ellas se analizan y caracterizan parámetros operativos que permitan la ubicación de puntos de contacto y configuración del manipulador, en aplicaciones prácticas (León et al., 2014). Los trabajos de Goins et al. (2014), y Rubert, Kappler et al. (2017) también han implementado métricas en algoritmos de predicción de la calidad del agarre, relacionadas con los puntos de contacto, su ubicación y distancia entre estos.
También se han implementado métricas en la evaluación del desempeño de manos robóticas, comparando diferentes aspectos de diseño que conduzcan a mejorar su rendimiento (Rubert et al., 2014). Recientemente el National Institute of Standars and Technology propuso un marco unificado con el mismo fin, dada la necesidad de definir marcos generales que permitan evaluar el desempeño de un diseño de mano particular en el agarre de objetos (Falco et al., 2018).
A pesar de los avances en la evaluación de manos robóticas mediante variadas métricas de desempeño, no se han contemplado métricas para evaluar el desempeño de controladores automáticos para el agarre de objetos, puesto que comúnmente los controladores propuestos se evalúan en cuanto al logro del seguimiento de consignas de fuerza o posición, mas no en cuanto al desempeño del agarre del objeto. De este modo, un diseñador no tiene claridad en cuanto a qué estrategia de control, de entre las muchas opciones disponibles, es la más adecuada para el logro de un mejor desempeño del agarre.
En este artículo se contribuye al problema descrito previamente, proponiendo un método para cuantificar la incidencia que tiene la estrategia de control realimentado utilizada en el agarre de poder con una prótesis de mano robótica. Para ello se construye, de manera metodológica, un índice compuesto que permite cuantificar la efectividad de una determinada estrategia de control en el logro del agarre de poder buscado con la prótesis. El aporte central de este trabajo investigativo es que el método propuesto permite tener un indicador para concluir acerca de qué estrategia de control, entre varias implementadas, logra el mejor desempeño funcional en cuanto a agarre de poder.
Método para valoración comparativa de estrategias de control
Para dar respuesta a la problemática presentada se debe adoptar un marco de referencia para cuantificar el desempeño del agarre de poder. Para ello se propone un método compuesto por tres fases: la primera consiste en la adopción de un conjunto de métricas con las cuales obtener datos cuantitativos relacionadas con la calidad del agarre de poder y con el desempeño del objetivo de control para gobernar la prótesis; la segunda consiste en el cálculo de las métricas individuales seleccionadas para cada una de las técnicas de control de agarre a evaluar; y la tercera, la construcción de un indicador compuesto que arroje una valoración cuantitativa del agarre logrado, y con base a este indicador, evaluar las técnicas de control.
A continuación, se describen las fases del método propuesto, describiendo el cómo se implementaron para los datos de validación de este artículo en un entorno virtual. El hecho de validar el método mediante modelos virtuales permite que los resultados puedan repetirse en igualdad de condiciones, sin la presencia de los efectos externos al método que podrían ocurrir en un montaje real, según la naturaleza comparativa del procedimiento.
Fase 1. Métricas para calidad de agarre y desempeño de la estrategia de control
Se deben definir las métricas a implementar y que aporten información de la calidad del agarre y del seguimiento de consignas en agarres de poder. Se debe definir la instrumentación y forma de cálculo de cada métrica. En la literatura se han propuesto variadas métricas de calidad de agarre. En una revisión del tema se encontraron en la fase de agarre y síntesis de agarre hasta 24 métricas diferentes diseñadas para cuantificar la calidad del agarre (Rubert, León et al., 2017; León et al., 2014; Rubert et al., 2014; Falco et al., 2018). Para la fase de validación, en este trabajo se adoptaron las siguientes métricas para agarres de poder y seguimiento de consignas: fuerza del dedo, fuerza de agarre, eficiencia del agarre, tiempo del ciclo de agarre, resistencia al deslizamiento, error de seguimiento y sobreimpulso definidas en Falco et al. (2018), las cuales se definieron como métricas a implementar. Una vez seleccionadas las métricas, se deben describir las variables, el proceso para su cálculo y el entorno de medición de las métricas seleccionadas. En este trabajo, dicha descripción se hizo de la siguiente manera:
- Fuerza del dedo (F d ). Representa la fuerza máxima aplicada por cada dedo sobre el objeto, la cual se obtiene mediante el cierre de la mano y la toma de lectura de fuerza cuasiestática en las yemas de los dedos (se denomina fuerza cuasiestática a aquella con bajas oscilaciones, una vez realizado el agarre del objeto). En este trabajo se simuló la existencia de un sensor de fuerza en la yema de los dedos.
- Fuerza de agarre (F a ). Representa la fuerza máxima aplicada sobre el objeto, la cual se obtiene mediante el cierre de la mano y la toma de lectura de fuerza cuasiestática. En este trabajo se construyó un cilindro virtual a ser agarrado por la mano, simulando la existencia de una celda de carga en el interior del cilindro.
- Eficiencia de agarre (E a ). Representa el cociente entre la fuerza externa aplicada al objeto, de manera que produzca deslizamiento del objeto, y la fuerza aplicada al objeto con la mano. Se debe medir la fuerza externa en contacto con el objeto, y la fuerza realizada por la mano sobre el objeto, cuya lectura se toma en celda de carga.
- Tiempo del ciclo de agarre (T c ). Representa el tiempo requerido para que la mano haga los movimientos de cierre, agarre del objeto y apertura, el cual se calcula mediante la toma del tiempo desde el inicio de cierre de la mano hasta obtener una fuerza cuasiestática, una vez entrado en contacto con el objeto, cuyo valor se multiplica por dos; esto arroja el valor de Tc.
- Resistencia al deslizamiento (R d ). Representa la fuerza máxima soportada previo al deslizamiento del objeto. En este trabajo se obtuvo agarrando el cilindro con la mano, y aplicando una fuerza lateral tal que provoque el deslizamiento del objeto. Se mide la fuerza en la yema de los dedos en el instante del deslizamiento y se registra como R d .
- Error de seguimiento (E r ). Representa el error medio cuadrático (RMSE) entre la fuerza de referencia y la fuerza aplicada al objeto.
- Sobreimpulso (S m ). Representa el valor pico máximo de la curva de respuesta en el seguimiento de la consigna de fuerza en las yemas de los dedos en la ejecución del agarre. Se promedia el valor obtenido en las yemas.
Estas métricas son implementadas en un entorno virtual, el cual incluye una mano robótica cuyos dedos se actúan con un mecanismo de Stephenson I de seis barras Norton y McCarthy (2003), presentando un movimiento antropomórfico; un objeto cilíndrico para agarrar, y sensores de posición y fuerza para las estrategias de control.
Fase 2. Cálculo de métricas para las estrategias de control a evaluar
Se definen etiquetas para las técnicas de control a implementar describiendo las variables controladas, y el método de sintonización. Los resultados de las métricas adoptadas en la fase previa se organizan en una tabla de indicadores simples para cada técnica de control etiquetada. En el presente proyecto se seleccionaron aquellas técnicas viables de implementar en el entorno de simulación, las cuales se describen a continuación.
- LQR con acción integral (C 1 ). Permite control de posición (Fossen, 2011), cuya sintonización está basada en el modelo de la mano.
- Control por modelo interno IMC (C 2 ). Realiza un control de posición (Puerto et al., 2011), cuya sintonización está basada en el modelo de la mano.
- PID (C 3 ). Implementa un control de posición (Kent y Engeberg, 2016), cuya sintonización está basada en el modelo de la mano (Chen y Seborg, 2002).
- PI difuso (C 4 ). Presenta un control de fuerza (Deng et al., 2018), cuya sintonización está basada en el modelo de la mano (Castrillón Hernández y Castellanos-Cárdenas, 2015).
- PIadaptativo (C 5). Incorpora un control de fuerza (Deng et al., 2016), cuya sintonización está basada en el modelo de la mano (Castrillón Hernández y Castellanos-Cárdenas, 2015).
- Híbrido impedancia - PI (C 6 ). Realiza un control de posición y fuerza (Fan et al., 2018), cuya sintonización del lazo de fuerza es basada en el modelo (Castrillón Hernández y Castellanos-Cárdenas, 2015), y la sintonización del lazo de posición es basada en ensayo y error.
- Híbrido IMC - PI adaptativo (C 7 ). Utiliza un control de posición y fuerza, en cuyo lazo de posición se encuentra C 2 , y en el lazo de fuerza C 5 .
- Híbrido LQR - PI difuso (C 8 ). Aplica un control de posición y fuerza, en cuyo lazo de posición se encuentra C 1 y en el lazo de fuerza C 4 .
Las técnicas de control de posición presentan la desventaja de tener picos altos de fuerza en el agarre, cuya fuerza puede causar daños en el objeto. Las estrategias híbridas presentan las ventajas combinadas del control de posición y fuerza, cuyo cambio de estado se ejecuta al alcanzarse un error de posición inferior al 10 %, cambiando de control de posición a fuerza. En técnicas de control posición, en el valor de desempeño de las métricas de error de seguimiento y sobreimpulso, es asignado un valor de nulo.
Fase 3. Cálculo del indicador compuesto
Un indicador se compone de un conjunto de datos que ayudan a medir objetivamente la evolución de un proceso (AENOR, 2003). Se distinguen dos tipos de indicadores: simples y compuestos. El primero se define como una función de una o más variables que conjuntamente miden una característica; y el compuesto (IC) se define como una combinación matemática de indicadores simples (Bas Cerda, 2014). En la literatura se encuentran metodologías para la construcción de indicadores, como el aporte en Bas Cerda (2014) y Nardo et al. (2008), por tanto, se debe definir el procedimiento a seguir para la construcción del indicador compuesto. En el presente proyecto se adopta el método en Bas Cerda (2014) basado en el trabajo de Nardo et al. (2008), como guía para la propuesta del IC de desempeño. Los pasos utilizados para la construcción del IC en esta propuesta, aplicados al caso de estudio en este trabajo, son:
- Marco conceptual. El IC a construir tuvo como objetivo evaluar las técnicas de control en el desempeño del agarre de poder, dando a conocer cómo la selección de una estrategia específica incidía en el desempeño del agarre.
- Selección de indicadores simples. Se utilizaron los indicadores adoptados en la fase 1 del método, en este trabajo: F d , F a , E a , T c y R d relacionadas con calidad del agarre, E r y S m , asociadas con el desempeño del algoritmo de control. Otras métricas fueron excluidas por su enfoque hacia agarres de precisión o a la calibración de instrumentación. Población de datos. Se seleccionó el grupo de estrategias de control que permitieran agarres de poder, y se realizaron los experimentos para el cálculo de los indicadores para cada técnica. En este trabajo las técnicas evaluadas se describieron en la fase 2 como: 𝐶1, 𝐶2, 𝐶3, 𝐶4, 𝐶5, 𝐶6, 𝐶7 y 𝐶8.
- Normalización de datos. Se implementó el método de normalización de reescalamiento, al presentar ventajas sobre otros métodos de normalización; como permitir la aplicación de datos cuantitativos, la conservación de las distancias relativas, el ajuste de los indicadores a la misma escala de medida y al mismo rango de variación (Bas Cerda, 2014). Tratamiento de datos. Se analizó la presencia de valores atípicos en los datos obtenidos en las diferentes métricas. En este trabajo no se encontró ninguno, consecuencia de la estrategia de prueba en un modelo virtual. Se hallaron datos estadísticos correspondientes a media, desviación estándar, curtosis y coeficiente de asimetría. De esta información, se concluyó que la métrica F d presentaba una baja dispersión de datos, y una alta concentración alrededor de la media, según su valor de desviación estándar y curtosis, indicando un aporte bajo en información al IC.
- Análisis multivariante. Se halló la matriz de correlación entre los indicadores simples donde hubo una alta correlación entre F d y F a , lo que indicó la posibilidad de redundancia en la información aportada al IC. Luego se analizaron los componentes principales, donde se encontró que la proyección sobre dos componentes logró explicar el 72,45 % de la varianza. Esto se realizó mediante algoritmos para análisis de componentes principales en R, utilizando la interfaz gráfica R commander (Sáez Castillo, 2016). Analizando el plano de correlación en base a los dos componentes hallados, se observa la alta correlación entre las métricas F d , S m y F a .
- Ponderación y agregación de indicadores. Se propuso un indicador, l c1 indicado en la ecuación (1). Se asignaron pesos iniciales de igual proporción. A partir de la información aportada por el tratamiento de datos y el análisis multivariante, los pesos en (1) se ajustaron teniendo en cuenta la correlación entre los indicadores F a , F d y S m , asignándoles un peso bajo a dos de ellos. Ya que los indicadores F d y R d presentaron un alto valor de curtosis, indicando alta concentración de datos alrededor de la media, se le asignó a uno de ellos un peso levemente menor en comparación con la mayoría. Con la finalidad de comparar el indicador calculado con estos criterios, se implementó un algoritmo de optimización en la búsqueda de los pesos de los indicadores simples, de lo que se obtuvo un segundo indicador I c2, mostrado en la ecuación (2). El proceso de optimización es un enfoque conocido como método de búsqueda simple de Nelder-Mead (Becker et al., 2017), no requiere conocimiento de derivadas y tiende a producir resultados de convergencia eficientes. En la práctica, los pesos optimizados pueden dar lugar a pesos negativos, debido a la estructura de correlación ente indicadores simples. No se propone que los pesos optimizados se apliquen a ciegas, se plantean como una herramienta de aprendizaje para mostrar cuán lejos están los pesos de los valores óptimos, qué pesos de los indicadores tienen poco impacto en los resultados, e incluso que indicadores podrían eliminarse.

Análisis de sensibilidad. Se realizó con base al cálculo de las varianzas de los indicadores individuales y del indicador compuesto al aplicarlos a los datos; así, se definió la sensibilidad como el cociente entre la varianza esperada de un indicador simple y la varianza total de salida. Este análisis dio a conocer la influencia de cada índice simple en el IC.
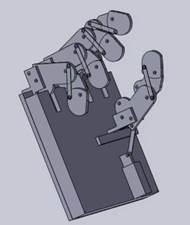
Validación experimental del método
El proceso para definición y validación del IC se llevó a cabo construyendo un prototipo virtual de una mano subactuada que utiliza mecanismos de barras, la cual se muestra en la figura 1. En el ambiente virtual se puede realizar el control de posición y fuerza de los dedos. En las pruebas efectuadas para medir las métricas encontradas en la literatura (Rubert et al., 2014; León et al., 2014; Falco et al., 2018; Rubert, León, et al., 2017), solo fuerza de agarre, fuerza del dedo, tiempo del ciclo de agarre, eficiencia, resistencia al deslizamiento y seguimiento de fuerza, se pueden implementar en la mano virtual con que se cuenta, considerando agarres de poder. El prototipo virtual se construyó mediante los paquetes de software MSC Adams®, y MatLab® los cuales son comerciales y ampliamente utilizados por los científicos en el mundo. MSC Adams está diseñado para análisis dinámico automático de sistemas multicuerpo (automatic dynamic analysis of multibody systems) y provee un gran conjunto de herramientas para construir ambientes virtuales compuestos de objetos 3D, además es compatible con software especializado de diseño asistido por computador (CAD), como SolidWorks. El motor de física de MSC Adams permite al usuario establecer propiedades como la gravedad, fuerzas y fuerzas generalizadas, 3D, pares, materiales de los cuerpos, entre otras. En MSC Adams también están disponibles una variedad de medidas físicas de variables y actuadores, lo que facilita el análisis comprensivo de un sistema mediante modelado simple y flexible de objetos sólidos. Esos objetos se interconectan mediante enlaces cinemáticos y restricciones de movimiento en una sola unidad, la cual corresponde a las características reales del sistema mecánico (Hroncová et al., 2014). La herramienta MSC Adams Controls permite exportar el modelo dinámico calculado a MatLab. La propiedad de cosimulación implementada en MSC Adams facilita el intercambio de información entre los dos simuladores en tiempo de simulación, de modo que el usuario puede sacar ventaja de las capacidades sobresalientes de MatLab para análisis y diseño de controladores para el sistema robótico. Algunos trabajos reportados que utilizan MSC Adams y MatLab en cosimulación son Rubert, Kappler et al. (2017), Rubert et al. (2014) y Falco et al. (2018), quienes demuestran el potencial de simulación para sistemas dinámicos mecánicos.
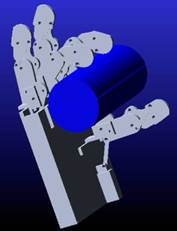
Se llevaron a cabo las pruebas para el indicador compuesto, en el entorno virtual mostrado en la figura 2, ejecutando el agarre de un cilindro de diámetro pequeño, definido en la taxonomía propuesta en Feix et al. (2016) como un agarre de poder.
Resultados
Siguiendo el método propuesto en este trabajo, se evaluaron estrategias de control realimentado en la funcionalidad de agarre de poder con una prótesis de mano, donde se calcularon los indicadores simples de fuerza del dedo, fuerza de agarre, resistencia al deslizamiento, tiempo de ciclo de agarre, eficiencia, sobreimpulso y error de seguimiento. Luego, se seleccionaron ocho estrategias de control a implementar. Después, se construyó un indicador compuesto, con base en la metodología descrita; por último, se evaluó el desempeño de los controladores. A continuación, se dan a conocer los resultados en la evaluación de los controladores mediante I c1 e I c2.
En la figura 3 se ilustran los valores de desempeño que se obtuvieron con cada uno de los controladores evaluados según I c1 e I c2, donde I c1 representa el indicador propuesto en base al método propuesto, e I c2 representa el indicador obtenido mediante un algoritmo de optimización con base al análisis de sensibilidad. A modo de validación comparativa del indicador I c1 frente a I c2, se observa un alto grado de similitud en los valores de desempeño arrojados en controladores como C 3 , C 4 , C 5 , C 6 , C 7 y C 8 , demostrando la congruencia del método propuesto para la construcción del indicador compuesto.
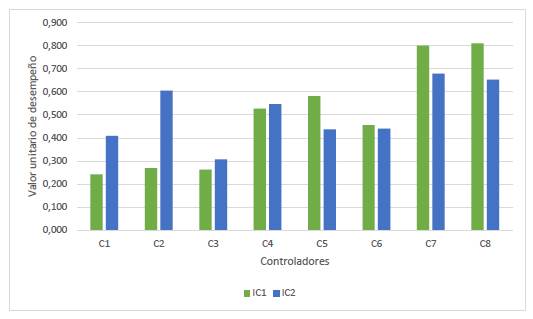
En el desempeño de los controladores se aprecia el mayor valor en C 7 y C 8 en ambos indicadores, y con menor desempeño los controladores C 1 y C 3 . Con los valores de desempeño un diseñador podría elegir entre C 7 y C 8 , dado que poseen un desempeño similar, aunque con requerimientos de implementación diferentes, con lo cual no se pierde funcionalidad en el agarre y se acopla a las necesidades y recursos del diseñador.
A continuación, se muestran algunos datos que permiten comprender el porqué del valor de desempeño de los controladores C 1 , C 2 , C 7 y C 8 ; y que a su vez muestran que los dos indicadores compuestos efectivamente coinciden en el desempeño que se desea evaluar.
En la tabla 1 se muestran los valores normalizados obtenidos con cada métrica por los controladores evaluados, se observa cómo aquellos con mayor desempeño (C7 y C8) presentan una mayor valoración de métricas simples sobre controladores con bajo desempeño (C 1 y C 3) según los IC, en métricas como F d , F a , R d , T c , S m y E r . Con ello se resalta la superioridad del control híbrido sobre el control de fuerza y posición, teniendo en cuenta las técnicas de control y métodos de sintonización implementados.
Tabla 1 Valores normalizados de los controladores en cada métrica
| C 1 | C 3 | C 7 | C 8 | |
|---|---|---|---|---|
| F d | 0,395 | 0 | 1 | 1 |
| F a | 0,511 | 0,014 | 1 | 1 |
| R d | 0,667 | 0,333 | 0,8 | 0,733 |
| T c | 0,734 | 0 | 0,867 | 0,745 |
| E a | 0,012 | 1 | 0,280 | 0,427 |
| S m | 0 | 0 | 0,987 | 0,997 |
| E r | 0 | 0 | 0,975 | 0,985 |
En los valores normalizados, 1 indica un logro ideal del indicador considerándose el mejor, y 0 indica un logro nulo considerándose el peor.
Fuente: elaboración propia.
Es de aclarar en la presente investigación que el desempeño de un controlador en comparación con otros, en base a las métricas, no es indicativo de superioridad de una técnica de control respecto a otra, puesto que influyen aspectos como la calidad de sintonización, o el uso o no de modelos para el objeto o para la mano. Por tal razón, la actual propuesta de un método de comparación de desempeño de las técnicas centrado en el desempeño del agarre ofrece una herramienta analítica para decidir acerca de qué estrategia de control es más adecuada para una tarea específica con la prótesis, instrumentación y hardware disponible.
Conclusiones
Cuando se desea comparar el desempeño de técnicas de control para el agarre de objetos, las decisiones se toman usualmente con base en criterios relacionados con el error de seguimiento de consignas y esfuerzos de control. De otro lado, las métricas de desempeño para evaluar la calidad de agarre evalúan aspectos disimiles en el agarre de poder, aunque de forma aislada. En este trabajo se ha propuesto un método tendiente a facilitar la toma de decisiones del diseñador en cuanto a la técnica de control más adecuada, entre varias disponibles, para el logro del agarre de poder con una prótesis específica. El método busca construir un indicador compuesto que agrupa variadas métricas para evaluar funcionalidad particular de agarre, y también para cuantificar el logro de seguimiento de consignas, facilitando la toma de decisiones acerca de la incidencia de la técnica de control en el logro del objetivo final.
En este trabajo se siguieron dos enfoques distintos para la construcción de un indicador compuesto, llegando a conclusiones similares con los dos indicadores, lo que muestra que, si el procesamiento de la información disponible es adecuado, el método propuesto lleva a conclusiones coherentes.
Este método podría utilizarse para evaluar otros aspectos como el diseño mecánico de la mano, el uso de ciertos actuadores o sensores, cuyo beneficio final no son del todo claros para que el diseñador de prótesis tome decisiones acertadas.
Trabajos futuros buscan evaluar el método propuesto en prototipos de laboratorio de prótesis de mano robóticas físicas.

