










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
 Citado por Google
Citado por Google -
 Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google
Compartir

 Permalink
PermalinkRevista de Economía Institucional
versión impresa ISSN 0124-5996
Rev.econ.inst. v.7 n.13 Bogotá dic. 2005
MODELO DE MANADAS Y APRENDIZAJE SOCIAL
A MODEL OF HERDS AND SOCIAL LEARNING
Juan Pablo Herrera* y Francisco Lozano Gerena**
* Profesor de la Facultad de Economía, Universidad Externado de Colombia, juanpabloherrera@cable.net.co
** Profesor asociado, Universidad Nacional de Colombia, fjlozanog@unal.edu.co Fecha de recepción: 6 de agosto de 2004, fecha de aceptación: 8 de abril de 2005.
RESUMEN
[Palabras clave: manadas, aprendizaje social, actualización bayesiana; JEL: C11, D71, D83]
Para los economistas es importante saber cómo toman decisiones los individuos. Los agentes económicos suelen imitar las acciones de otros agentes. Cabe entonces preguntar por qué los individuos racionales imitan el comportamiento de otros y deciden no sólo con base en su información privada. Bikhchandani, Hirshleifer y Welch (1992) mostraron que los agentes completamente racionales que conocen toda la historia de las decisiones pasadas pueden tener un comportamiento imitativo o de manada, el cual puede estancar el proceso de aprendizaje social. En este artículo se examinan las condiciones para la existencia del aprendizaje social y se muestra que también puede existir dentro de una manada.
ABSTRACT
[Key words: herds, social learning, Bayesian update; JEL: C11, D71, D83]
One of the most frequent questions asked by economists is how individual members of societies make choices. It can be observed that economic agents imitate other agents actions. It should be asked why rational people choose to imitate other peoples behaviour and make decisions that are not based on their own private information. Bikhchandani, Hirshleifer and Welch (1992) showed that fully rational agents, who understand the history of decision making, can generate this kind of behaviour. An important feature of this model is that once individuals begin to imitate others, the social learning process is halted. This paper shows that social learning occurs if agents have a continuum set of actions to choose from or if they just have a sample of the history. It also shows that this type of learning can occur within a herd.
Una pregunta de interés permanente entre los economistas es la de cómo toman decisiones los individuos en la sociedad. Es usual que los agentes económicos imiten las acciones de otros agentes. Quizás la tendencia humana a crear íconos y pautas de comportamiento nos lleve desde muy jóvenes a imitar conductas, actitudes, lenguajes y esquemas de razonamiento (Bandura, 1963 y Flanders, 1968). Por ejemplo, cuando vamos a almorzar y debemos elegir entre dos restaurantes, uno con gran afluencia de clientes y el otro casi vacío, pensamos de inmediato que es más conveniente entrar al primero, pues es posible que esas personas lo hagan porque tienen información que tal vez desconocemos. Las personas que llegan después pueden hacer el mismo razonamiento y optar por el mismo restaurante, dando origen a lo que se ha denominado una manada. Así mismo, es muy probable que un inversionista que planea su portafolio invierta en activos que circulen en el mercado y hagan parte del portafolio de sus pares, porque la complejidad de los flujos de información limita la posibilidad de conseguir toda la información necesaria para excluir la necesidad de reflexionar sobre la acción tomada por el otro. Si se observa secuencialmente el comportamiento de varios de estos inversionistas se puede detectar un comportamiento de manada. Hay muchos ejemplos de comportamiento cotidiano imitativo: las modas en la compra de bienes y servicios como el vestuario, los automóviles, el corte de cabello y los programas para computador. Aun en campos como la medicina, la tendencia a formular medicamentos o usar procedimientos quirúrgicos habituales, puede obedecer a procesos de imitación, así no sean necesariamente los más apropiados para cada caso particular.
En otros campos del conocimiento, como la sicología, se han elaborado teorías que intentan explicar los procesos de interacción social que determinan comportamientos individuales como los que ilustran los ejemplos anteriores. Un primer enfoque, propuesto por Vroom (1964) y Locke (1968), intenta entenderlos como una función de elementos internos de cada individuo. A partir de aspectos muy particulares y subjetivos de la percepción, es posible considerar el entorno como una fuente de información que, asimilada por los individuos, determina sus actitudes y acciones dentro de la sociedad. Un segundo enfoque, atribuido a Skinner (1953) y Luthans (1973), define los hábitos y comportamientos del individuo como una función exclusiva del entorno, y sostiene que el rol que un individuo desempeña en la sociedad determina, refuerza o desvía los patrones de comportamiento iniciales. El tercer enfoque, desarrollado por Maslow (1968), combina los dos anteriores y considera que la conjunción de factores externos y de factores asociados a la personalidad del individuo define completamente su comportamiento y su conexión con la sociedad. En esta propuesta se hace explícita una relación causal unidireccional: el entorno junto con los factores individuales determinan las acciones del individuo.
Un hecho fundamental que cambia la dimensión del análisis de la conducta del individuo en la sociedad es la ruptura de la unidireccionalidad anterior. Bandura (1977) propone una teoría en la que el entorno no explica de manera unívoca el comportamiento del individuo, pues éste también aporta elementos para construir el tejido social. El canal de transmisión es el siguiente: la acción individual es una señal que se envía a un conglomerado social que la absorbe y, a través de sus respuestas, retroalimenta las decisiones del individuo. Así se genera un ciclo en el que la parte y el todo interactúan permanentemente, interacción que condiciona los comportamientos individuales y afecta las tendencias de comportamiento grupal.
Los resultados del análisis del aprendizaje social en el campo de la psicología son la base para construir modelos económicos en los que los individuos se deben adaptar al entorno y a la vez determinan el entorno de otros agentes, condicionando los distintos procesos de elección y, por supuesto, los procesos de aprendizaje social. Esta es la característica de los modelos que consideramos en este escrito.
Es interesante observar que los animales tienen comportamientos similares: la elección del territorio donde habitan o de la pareja, fundamentalmente procesos instintivos, son buenos ejemplos de imitación a partir de la interacción social. Por ello es natural preguntarse si es posible que las manadas surjan de procesos de decisión consciente. Aún más, ¿es posible que los agentes racionales decidan imitar el comportamiento de otros y tomar sus decisiones no sólo con base en la información privada que poseen? Si así fuese, nos enfrentaríamos a una interesante paradoja: ¿cómo es posible que agentes racionales tomen decisiones que, en el agregado, puedan resultar irracionales? Bikhchandani, Hirshleifer y Welch (1992) (en adelante BHW) mostraron que agentes totalmente racionales pueden generar comportamientos de manada1.
A partir de estas reflexiones, el trabajo se organizó en cuatro secciones, además de esta introducción. En la primera, se presenta el modelo BHW, haciendo énfasis en las hipótesis acerca del comportamiento de manada para contrastar este modelo con los de las secciones siguientes. Una característica del modelo BHW es que los individuos, una vez entran en un proceso de imitación, detienen el de aprendizaje social y, si no hay ningún choque exógeno, ningún mecanismo podrá garantizar endógenamente el reinicio del proceso de aprendizaje social. ¿Qué se podría esperar si se relajan algunos de los supuestos del modelo BHW? La segunda y la tercera secciones intentan resolver este interrogante. La segunda, siguiendo a Chamley (2003), presenta un modelo similar al de la primera, excepto que los conjuntos de posibles estados de la naturaleza, de acciones y señales, no son binarios sino conjuntos con un continuo de elementos. La conclusión central de este modelo es que no surgen manadas, porque si los agentes poseen un continuo de acciones posibles pueden responder con pequeños cambios a pequeñas variaciones en las señales que perciben e inferir con exactitud, a partir de las elecciones anteriores, la información privada de los agentes que eligieron previamente. En la tercera se describe y analiza un modelo similar al modelo BHW pero, ahora, cada agente observa la acción de sólo dos de sus antecesores. El resultado principal es que los agentes pueden terminar eligiendo la misma acción a partir de cierto momento sin que esto impida la convergencia hacia el punto de verdad, es decir, al punto en el que la proporción de individuos que eligen la acción correcta es igual a 1. Así, el modelo muestra la convergencia hacia la verdad dentro de una manada. En la sección final se presentan algunas conclusiones y se plantean algunas preguntas que deberían responder futuras investigaciones.
EL MODELO BHW
Consideremos una situación en la que un individuo debe tomar una decisión desconociendo algo relevante que ha ocurrido. Así, el agente se debe formar una expectativa acerca de lo que ocurrió efectivamente, y lo puede hacer con base en la información privada que posee y la historia de decisiones similares de otros o de él mismo. La pregunta es cómo utilizará esta información para actualizar sus creencias a priori.
A lo largo de este análisis suponemos que, cuando reciben nueva información, los individuos actualizan sus creencias mediante la regla de Bayes. Sea q el conjunto de posibles estados de la naturaleza. Se elige uno de esos estados de acuerdo con una distribución de probabilidad, P(q), que suponemos es conocida por el agente. El individuo no sabe cuál de los estados de la naturaleza ha ocurrido, pero recibe una señal que le informa acerca de ese estado. La distribución de probabilidad de la señal es una función de q y suponemos que la nueva distribución de probabilidad sobre q, una vez dada la señal, cambia, es decir, que existe un mecanismo de actualización de la distribución de probabilidad sobre q. La regla de Bayes implica que la distribución a posteriori de q , P(q/s), está dada por:
![]()
Si sólo existen dos estados de la naturaleza, qH y qL, la regla de Bayes implica que:
![]()
Cuando sólo existen dos estados de la naturaleza posibles es útil considerar la tasa de verosimilitud, l, y definida como el cociente de las probabilidades a posteriori entre los dos estados de la naturaleza; es decir:
![]()
La tabla siguiente resume la distribución de probabilidad de la señal s, condicionada al estado de la naturaleza q:
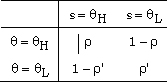
Así, por ejemplo, la probabilidad de que s = qH dado que q = qH es r, y la probabilidad de que s = qL dado que q = qL es r'. Aplicando la regla de Bayes es claro que:
![]()
Observemos que r y r' no son necesariamente iguales. Si r = r', diremos que, la señal es simétrica2.
Una vez especificado el mecanismo de actualización de las creencias, consideremos el modelo de aprendizaje social planteado por Bikhchandani, Hirshleifer y Welch (1992)3. Supongamos que sólo existen dos posibles estados de la naturaleza4: Q = {qH, qL} Í R2, donde qH,> 0 > qL. Existe un número contable de agentes que estarán indizados por t = 1, 2,... Cada agente debe tomar una acción de acuerdo con un orden establecido de manera exógena. Por simplicidad, suponemos que el agente t toma su decisión en el período t. Cada agente debe elegir una acción dentro del conjunto X = {0, 1}.
Antes de que el primero de los agentes elija su acción, ocurre uno de los dos estados de la naturaleza posibles y se mantiene invariante a lo largo del período de análisis. Ninguno de los agentes observa el estado de la naturaleza que ha ocurrido. Pero cada agente recibe una señal privada st acerca de la posible realización de este estado de la naturaleza. Esta señal puede tomar dos valores: qH y qL. Suponemos, por simplicidad, que esta señal es simétrica y que la calidad de la señal es r Î (1/2, 1), es decir, P(st = qH/q = qH) = r.
Cada agente elige la acción que maximiza su utilidad u(x, q) = (q - c)x, donde c Î (qL, qH) es el costo de tomar la decisión x=1. Dado que hay incertidumbre acerca del estado de la naturaleza que ha ocurrido, suponemos que cada agente maximiza su utilidad esperada. Es necesario precisar que el valor esperado de la utilidad se calcula de acuerdo con la distribución de probabilidad privada de cada agente. Si ![]() representa la creencia privada del agente t de que el estado de la naturaleza es qH, elige la acción x = 1 si y sólo si5:
representa la creencia privada del agente t de que el estado de la naturaleza es qH, elige la acción x = 1 si y sólo si5:
![]()
es decir, si y sólo si:
![]()
o, equivalentemente:
![]()
| Sean |  | y |
Recordemos que la distribución de probabilidad privada del agente t se calcula actualizando, mediante la regla de Bayes, la distribución de probabilidad pública del período t a partir de la señal privada que recibe el agente. Si mt representa esta distribución de probabilidad pública:
![]()
y
![]()
o, equivalentemente:
Por tanto, podemos reescribir la decisión que tomará el agente t en función de la creencia pública existente: el agente t elegirá x = 1 si y sólo si:
| donde |  | y |  |
En ésta y en las siguientes dos secciones suponemos que cada agente conoce la regla de decisión que utilizan los demás. En particular, en este caso, cada agente sabe que si el agente del período t recibe la señal qH, éste elegirá x = 1 si y sólo si lt > g - s.
DEFINICIÓN 1
Una manada se forma en un período T si todas las acciones a partir de ese período son idénticas, es decir, para todo t > T, xt = xT.
En una manada, los agentes imitan racionalmente el comportamiento de sus antecesores. Veamos en qué condiciones pueden aparecer manadas en este modelo.
TEOREMA 1
Sea t un período arbitrario. Entonces:
a) Si g - s < lt < g + s, el agente t elige x = 1 si y sólo si st = qH.
b) Si lt > g + s, el agente t elige x = 1 independientemente de la señal que reciba.
c) Si lt < g - s, el agente t elige x = 0 independientemente de la señal que reciba.
Prueba
Esto es claro de la regla de decisión que hemos establecido. Por ejemplo, si lt > g + s, el agente t decide elegir x = 1 si la señal que recibe es qH; como g + s > g - s, entonces también elige x = 1 si la señal que obtiene es qL.
TEOREMA 2
Una manada se formará eventualmente con probabilidad 1.
Prueba
Del teorema 1 se deduce que si lt Î (g - s, g + s], la acción que toma el agente t revela perfectamente la señal que ha recibido y, por tanto, la creencia pública al comienzo del período t + 1 es idéntica a la creencia privada del agente t. Si lt Î (-¥, g - s) È (g + s, ¥), la acción del agente t no revela nada acerca de la señal que ha recibido y, por ende, la creencia pública al comienzo del período t + 1 es idéntica a la creencia pública del período t. En este caso, el agente t + 1 adopta la misma acción del agente t independientemente de la señal que reciba y, entonces, empieza a presentarse un comportamiento de manada.
Supongamos que en el período t no se ha formado una manada y que el agente t + 1 recibe la misma señal que el agente t, por ejemplo, que el verdadero estado es qH. Esto implica que lt Î (g, g + s). Ya que el agente t + 1 también observa una señal qH, la creencia pública lt+1 es mayor que g + s) y este agente elige entonces x = 1 independientemente de la señal que reciba, con lo cual se empieza a generar un comportamiento de manada. Por tanto, una condición suficiente para que se formen manadas es la no alternancia sucesiva de las dos señales, es decir, que al menos dos agentes consecutivos reciban la misma señal. Como el evento de que las señales alternen sucesivamente ocurrirá eventualmente con probabilidad cero, las manadas se formarán eventualmente con probabilidad 1.
El teorema anterior muestra que las manadas sí se forman en el modelo BHW. Aquí las manadas aparecen como resultado de una decisión deliberada de los individuos, la cual no se debe confundir con la correlación de decisiones que, en ciertos casos, puede llegar a ser incidental. Por ejemplo, en el caso de los mercados financieros, los inversionistas tienen acceso a conjuntos de información comunes y pueden emplear técnicas similares para evaluar la información; así, los agentes se pueden comportar de forma muy parecida no porque imiten acciones de otros agentes sino porque la información disponible para todos es la misma. Por ello, es imprescindible identificar la información común a todos los agentes y las señales privadas que reciben. De la misma manera, es usual que un conglomerado de personas corra ante un disparo y se asocie este comportamiento al de una manada por el simple hecho de que muchos agentes toman la misma decisión. Sin embargo, sus decisiones no se basan necesariamente en un proceso consciente de imitación sino que corresponden a la elección instintiva de cada individuo ante un disparo.
DEFINICIÓN 2
Una manada es correcta si cuando ocurre el estado q = qH, los miembros de la manada toman la decisión x = 1 o si cuando ocurre el estado q = qL, eligen x = 0. Una manada es incorrecta si no es correcta.
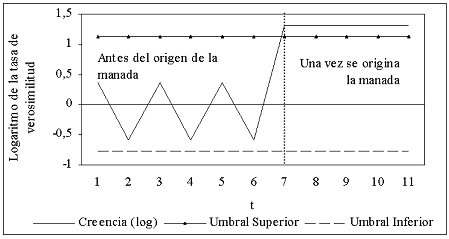
Para ilustrar esta definición se hizo un ejercicio de simulación con c = 0,6, r = 0,9 y m1 = 0,7. Después de varias simulaciones, se constató que en la mayoría de los casos las manadas, tanto correctas como incorrectas, aparecen antes del período 10. En las gráficas 1 y 2 se observa la evolución de la creencia pública.
Gráfica 1
Evolución de la creencia en una manada correcta
Gráfica 2
Evolución de la creencia pública en una manada incorrecta
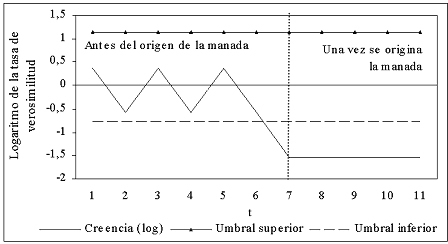
En estas gráficas, a partir del período 7 las creencias públicas dejan de actualizarse y se empieza a observar un fenómeno de manada ininterrumpido: una manada correcta en la gráfica 1 y una incorrecta en la gráfica 2. La existencia de manadas incorrectas no es algo extraño en este modelo. Supongamos, por ejemplo, que el estado de la naturaleza que ha ocurrido es qH. Si hasta el período t no ha aparecido una manada, la observación consecutiva de dos señales qL garantiza la aparición de una manada en la que todos los agentes eligen x = 0 a partir de ese período; es decir, la observación de dos señales consecutivas qL genera una manada incorrecta. Como éste es un evento con probabilidad positiva, las manadas incorrectas se forman.
UN MODELO DE APRENDIZAJE CON UN CONTINUO DE ACCIONES Y SEÑALES
En esta sección se presenta un modelo que, a diferencia del anterior, supone que los agentes tienen la posibilidad de elegir sobre un continuo de acciones y, además, que las señales privadas que reciben en cada período están definidas sobre un continuo de valores posibles. Se intenta evaluar el efecto que sobre el proceso de aprendizaje social tiene el hecho de que los agentes puedan ajustarse más fácilmente ante diferentes señales. Una analogía interesante es el efecto de la existencia de mejores mecanismos de comunicación sobre la transmisión de ideas, tal como contar con un lenguaje amplio: cuando los individuos tienen la posibilidad de utilizar un gran número de vocablos, pueden expresar mejor sus ideas. De manera similar, cuando un individuo tiene la posibilidad de utilizar muchas acciones le es más fácil transmitir la información privada que posee. Por tanto, es razonable concluir que, cuando los agentes disponen de un continuo de acciones, pueden transmitir su información privada de manera eficiente. Esto es lo que se mostrará a continuación.
Consideremos una situación en la que el conjunto de estados de la naturaleza es el conjunto de los números reales y en la que estos estados se distribuyen normalmente con media m y varianza s2. Existe un número contable de agentes indizados por t = 1, 2… Cada agente debe tomar una acción de acuerdo con un orden establecido de manera exógena. Por simplicidad, supondremos que el agente t toma su decisión en el período t. Cada agente debe elegir una acción en el conjunto de los números reales.
Antes de que el primero de los agentes elija su acción, ocurre uno de los estados de la naturaleza posibles,  , que es invariante a lo largo del período de análisis. Ninguno de los agentes observa el estado de la naturaleza que ha ocurrido. Sin embargo, cada agente recibe una señal privada st acerca de la posible realización de este estado. Suponemos que la señal es de la forma
, que es invariante a lo largo del período de análisis. Ninguno de los agentes observa el estado de la naturaleza que ha ocurrido. Sin embargo, cada agente recibe una señal privada st acerca de la posible realización de este estado. Suponemos que la señal es de la forma ![]() , donde et es una variable aleatoria normal con media cero y varianza s2e, es decir, la señal privada que recibe cada agente es igual al estado de la naturaleza que ha ocurrido más cierto ruido. Utilizando las propiedades de la distribución normal, es posible ver que st también se distribuye normalmente con media
, donde et es una variable aleatoria normal con media cero y varianza s2e, es decir, la señal privada que recibe cada agente es igual al estado de la naturaleza que ha ocurrido más cierto ruido. Utilizando las propiedades de la distribución normal, es posible ver que st también se distribuye normalmente con media ![]() y varianza s2e.
y varianza s2e.
En este contexto, la regla de Bayes implica que si g(q) es la función de densidad a priori y f(s/q) es la función de densidad de la señal condicionada a q, la función de densidad a posteriori de q está dada por:
TEOREMA 3
Si la distribución a priori de los estados de la naturaleza es normal con media m y varianza s2 y se recibe una señal s que es elegida de una distribución normal con media ![]() y varianza s2e, entonces la distribución de probabilidad a posteriori es normal con media as + (1 - a) m y varianza:
y varianza s2e, entonces la distribución de probabilidad a posteriori es normal con media as + (1 - a) m y varianza:
 | , | donde |  |
Para una prueba de este teorema, ver Amemiya (1994).
Cada agente elige la acción que maximiza su utilidad u(x, q) = 2qx - x2. Dado que hay incertidumbre acerca del estado de la naturaleza que ha ocurrido, suponemos que cada agente maximiza su utilidad esperada, que se calcula de acuerdo con la distribución de probabilidad privada de cada agente. La acción óptima que elige el agente representativo resuelve el siguiente problema:
![]()
La condición suficiente y necesaria de primer orden es 2E[q] - 2x* = 0, es decir, x*= E[q].
En este modelo, donde existe un continuo de acciones y de señales, no se forman manadas. La creencia pública antes de que el agente 1 tome su decisión es N(m,s2). El agente 1 recibe una señal privada s1 elegida de una distribución normal con media y varianza s2e De acuerdo con el teorema 3, la creencia privada del agente 1 es normal con media:
y varianza:

| donde |  |
La elección óptima del agente 1 es:
![]()
Ya que los demás agentes conocen la regla de decisión del agente 1 y el valor de los parámetros a1 y m y, además, han observado la acción que ha elegido, pueden inferir perfectamente la señal privada que recibió el agente 1 a partir de la decisión que tomó. Por tanto, la creencia privada del agente 1 es ahora pública, es decir, la creencia pública antes de que el jugador 2 deba tomar su decisión es N(m1,s21) donde ![]() y
y ![]() .
.
El agente 2 recibe ahora su señal privada s2. Aplicando nuevamente el teorema 3, se tiene que la creencia privada del agente 2 es normal con media:
y varianza:

| donde |  |
La elección óptima del agente 2 es:
![]()
lo que implica que:
Ya que los demás agentes conocen la regla de decisión del agente 2 y el valor de los parámetros s2 y m1 y, además, han observado la acción que ha elegido, pueden inferir perfectamente la señal privada que recibió el agente 2 a partir de la decisión que tomó. Por tanto, la creencia privada del agente 2 es también pública; es decir, la creencia pública antes de que el jugador 3 deba tomar su decisión es normal con media ![]() y varianza
y varianza ![]() .
.
Mediante inducción matemática se puede demostrar que la creencia privada del agente t es normal con media6:

y varianza:
| donde |  |
Como la regla de decisión del agente t, el valor de los parámetros at y mt-1 y la acción que elige son de conocimiento público para los agentes que tomarán su decisión en un período posterior, ellos infieren la señal privada que recibió el agente t a partir de su acción. Por tanto, la creencia privada del agente t es ahora de conocimiento público. Esto significa que la creencia pública al comienzo del período t + 1 es normal con media ![]() y varianza
y varianza ![]() .
.
En general, las decisiones que toman los agentes no son iguales. Los agentes t y t + 1 toman la misma decisión si la señal st+1 que recibe el agente t + 1 es idéntica a la media de la distribución pública existente. Como éste es un evento que ocurrirá eventualmente con probabilidad cero, las manadas no aparecen en este modelo.
Además, es posible demostrar por inducción hacia atrás que:![]()
Así, a medida que t tiende a infinito, la varianza de la creencia pública tiende a cero, lo cual implica que eventualmente los agentes aprenderán cuál fue el estado de la naturaleza que efectivamente ocurrió7; es decir, existe convergencia hacia la verdad. La tasa de convergencia es igual a 1/t, y Vives (1993) la denomina tasa de convergencia eficiente.
El resultado contrasta significativamente con el del modelo de la sección anterior. Mientras que en el modelo BHW las manadas se forman con probabilidad 1, en éste no se forman. Esta diferencia obedece a que para cada agente del modelo BHW los conjuntos de estados de la naturaleza, de acciones y de señales son binarios, mientras que los agentes del modelo de esta sección sí pueden responder con pequeños cambios en las acciones a pequeñas variaciones en las señales que perciben e inferir con exactitud, en función de las elecciones realizadas, la información privada de los agentes que eligieron previamente. Esto se debe a que sus conjuntos de acciones y de señales están definidos sobre un continuo.
UN MODELO DE MANADAS CON APRENDIZAJE SOCIALHasta ahora hemos considerado un modelo en el que los agentes racionales toman decisiones de manera secuencial en un entorno en el que conocen toda la historia de las decisiones previas. Vimos que puesto que eligen las señales y las acciones de dentro de un conjunto binario, los individuos terminan dando mayor importancia a la creencia pública que a la señal privada que reciben, y así dan lugar a la formación de manadas y a la detención del proceso de aprendizaje social. Una pregunta relevante en este punto es: ¿qué sucedería si los agentes no tienen la posibilidad de conocer perfectamente la historia del juego, es decir, si desconocen una o varias de las acciones de sus antecesores? Fudenberg y Banerjee (2003) proponen un modelo que permite obtener una primera respuesta. El modelo que se presenta a continuación no es idéntico al de Fudenberg y Banerjee, pero mantiene su estructura fundamental.
Consideremos una situación en la que sólo existen dos posibles estados de la naturaleza igualmente probables: Q = {qH, qL} Í R2, donde qH > 0 > qL. Suponemos, por simplicidad, que qH = 1 y qL = 0. Existe un continuo de agentes de masa 1. Sea a la proporción de agentes de nacen en el momento t y que deben tomar una decisión en ese mismo momento. Estos agentes son reemplazados por otros nuevos una vez han tomado su decisión. El orden en el que los agentes toman su decisión sigue siendo establecido de manera exógena.
Al comienzo de la economía ocurre uno de los dos estados de la naturaleza posibles y se mantiene invariante a lo largo del período de análisis. Ninguno de los agentes observa ese estado. Sin embargo, cada uno de ellos recibe una señal privada s(t) acerca del verdadero estado de la naturaleza. Esta señal puede tomar dos valores posibles: 1 y 0. Suponemos que esta señal es simétrica y que su calidad es r Î (1/2, 1). Además, y a diferencia de los modelos de la primera y la segunda secciones, cada agente sólo observa la acción elegida por dos predecesores. Estos dos individuos son elegidos aleatoriamente a través de un mecanismo no sesgado. La proporción relativa de agentes de la muestra que han tomado una u otra elección es una señal de la proporción de agentes de la población que eligen entre una y otra acción. La información que cada individuo obtiene de su muestra no está disponible para los demás agentes.
Suponemos que todos los agentes son idénticos ex ante. El objetivo de cada agente es elegir una acción dentro del conjunto X = {0, 1} que maximice su utilidad, la cual está dada por:
![]()
Si ![]() representa la creencia privada de un agente del momento t de que el estado de la naturaleza es qH, elige la acción x = 1 si y sólo si:
representa la creencia privada de un agente del momento t de que el estado de la naturaleza es qH, elige la acción x = 1 si y sólo si:
![]()
es decir, si y sólo si:
![]()
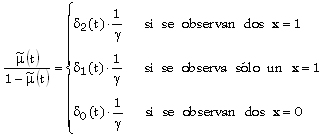
Sea y(t, q) la proporción de agentes que eligen x = 1 en el estado de la naturaleza q. Suponemos que la proporción inicial de individuos que eligen la acción x = 1 en cada uno de los estados de la naturaleza es de conocimiento común. Sean:

Así, por ejemplo, d2(t) es la razón de verosimilitud entre los dos estados de la naturaleza de observar dos x = 1. Dadas las señales que reciben los agentes y dado que los dos estados de la naturaleza son igualmente probables a priori, la regla de Bayes implica que si s(t) = qH:
y si s(t) = qL,
| donde |
En cada momento, cada agente conoce el proceso de decisión de los demás y puede determinar la evolución de la proporción de agentes que eligen x = 1 en cada uno de los estados de la naturaleza, ![]() . Sea p(t, q) la probabilidad de que los agentes que nacen en el período t elijan x = 1 cuando el verdadero estado de la naturaleza es q. Entonces:
. Sea p(t, q) la probabilidad de que los agentes que nacen en el período t elijan x = 1 cuando el verdadero estado de la naturaleza es q. Entonces:
![]()
El punto de verdad (1, 0), en el que la proporción de individuos que eligen la acción correcta es igual a 1 es un punto estacionario del sistema dinámico. Si cada agente observa únicamente la acción elegida por dos de sus predecesores, esta elección se realiza a través de un mecanismo aleatorio no sesgado y r es suficientemente grande, entonces el equilibrio estacionario (1, 0), es globalmente estable.
El análisis del sistema dinámico se puede dividir en catorce casos. Analizaremos cinco de ellos puesto que los demás son similares.
PRIMER CASO
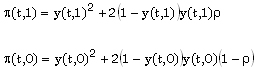
Una primera posibilidad es que se presenten las siguientes desigualdades:
![]()
Estas desigualdades caracterizan la región I de la gráfica 3. Si un agente observa dos x = 1, decide elegir x =1 independientemente de la señal que reciba; si observa dos x = 0, decide elegir x = 0 independientemente de la señal que reciba; y si sólo observa una acción x = 1, elige x = 1 si y sólo si la señal que recibe es q = 1. Por tanto, las probabilidades de que los agentes que nacen en el período t elijan x = 1 cuando el estado es q = 1 y cuando el estado es r = 0 son:
respectivamente. El sistema dinámico en esta región está dado entonces por:
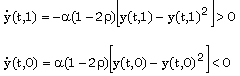
Las desigualdades se derivan del hecho de que r > 1/2.
SEGUNDO CASO
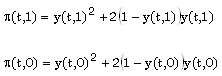
Una segunda posibilidad es que se presenten las siguientes desigualdades:
![]()
Estas desigualdades caracterizan la región II de la gráfica 3. Aquí, si un agente observa al menos un x = 1, decide elegir x = 1 independientemente de la señal que reciba; y si no observa ningún x = 1, decide elegir x = 0 independientemente de la señal que reciba. Por tanto, las probabilidades de que los agentes que nacen en el período t elijan x = 1 cuando el estado es q = 1 y cuando el estado es q = 0 son:
El sistema dinámico en esta región está dado por:
TERCER CASO
Una tercera posibilidad es que se presenten las siguientes desigualdades:
![]()
Estas desigualdades caracterizan la región III de la gráfica 3. En esta región, si un agente observa dos x = 1, decide elegir x = 1 independientemente de la señal que reciba; y si observa al menos un x = 0, decide elegir x = 0 independientemente de la señal que reciba. Por tanto, las probabilidades de que los agentes que nacen en t elijan x = 1 cuando el estado es q = 1 y cuando el estado es q = 0 son:
El sistema dinámico en esta región está dado por:
CUARTO CASO
Una cuarta posibilidad es que se presenten las siguientes desigualdades:
![]()
Estas desigualdades caracterizan la región IV de la gráfica 3. En ella, si un agente observa dos x = 1, decide elegir x = 1 si y sólo si la señal que recibe es q = 1; y si observa al menos un x = 0, decide elegir x = 0 independientemente de la señal que reciba. Por tanto, las probabilidades de que los agentes que nacen en t elijan x = 1 cuando el estado es q = 1 y cuando el estado es q = 0 son:
El sistema dinámico en esta región está dado por:
QUINTO CASO
Una quinta posibilidad es que se presenten las siguientes desigualdades:
![]()
Estas desigualdades caracterizan la región V. En esta región, si un agente observa al menos un x = 1, decide elegir x = 1 independientemente de la señal que reciba; y si no observa ningún x = 1, decide elegir x = 1 si y sólo si la señal que recibe es q = 1. Por tanto, las probabilidades de que los agentes que nacen en t elijan x = 1 cuando el estado es q = 1 y cuando el estado es q = 0 son:
El sistema dinámico en esta región está dado por:
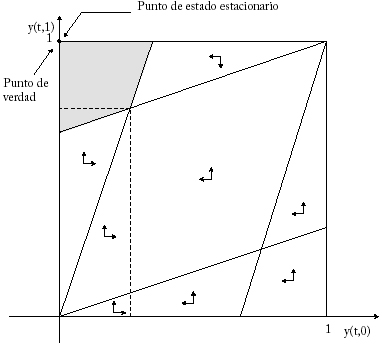
Gráfica 3
Diagrama de fase cuando se realizan dos observaciones
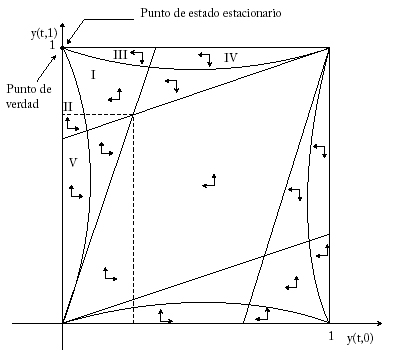
En todas estas regiones puede existir un comportamiento de manada. En particular, en la región I, si un agente observa dos x = 1, decide imitar esta acción. En la gráfica 3 se representa la dinámica de cada una de las regiones.
Es necesario señalar que la estabilidad global del equilibrio estacionario está garantizada para valores de r suficientemente grandes, ya que para algunas regiones las desigualdades están condicionadas precisamente a niveles altos de calidad de la señal8.
Los resultados de esta sección muestran que existe convergencia hacia la verdad incluso cuando hay manadas. Así, las manadas no necesariamente impiden los procesos de aprendizaje social. Ahora podemos establecer claramente la relación entre este modelo y el BHW. En este último, cada agente observa toda la historia de las decisiones pasadas. En consecuencia, lo mejor que puede hacer, en la mayoría de los casos, es imitar el comportamiento de los que lo han precedido. Este comportamiento puede ser erróneo en el sentido de que los miembros de la manada no eligen lo que habrían escogido con información simétrica. En cambio, cuando observan únicamente la acción de dos antecesores, utilizarán su información privada porque la muestra que observan es tan sólo una señal con ruido de lo que efectivamente ha ocurrido. De esta manera se garantiza el aprendizaje social en el largo plazo.
La hipótesis de que cada agente observa a dos de sus predecesores es esencial. Supongamos ahora que cada agente tiene la posibilidad de ver la acción de uno de ellos. La regla de Bayes implica que si s(t) = qH:
y si s(t) = qL
| donde |
Supongamos que
![]()
Entonces si un agente observa x = 1, decide elegir x = 1 independientemente de la señal que reciba; y si observa x = 0, decide elegir x = 0 independientemente de la señal que reciba. Por tanto, en esta región todos los agentes siguen un comportamiento de manada. El sistema dinámico en esta región está dado por:

Así, todos los puntos de esta región son estacionarios y, en consecuencia, el punto de verdad no es globalmente estable. La dinámica de todas las regiones se representa en la gráfica 4.
Gráfica 4
Diagrama de fase cuando se realiza una observación
CONCLUSIONES
La modelación de situaciones en las que existen procesos de interacción social ha sido ampliamente estudiada desde una perspectiva teórica. Sin embargo, la modelación de procesos de imitación es un campo de análisis relativamente joven y muy rico en aplicaciones a situaciones específicas. Este escrito presenta la naturaleza de una manada y su relación con los procesos de aprendizaje social. Muestra que los procesos de aprendizaje social y la formación de manadas pueden ser excluyentes puesto que, en ciertas condiciones, las manadas pueden llegar a detener los procesos de aprendizaje social y llevar a comportamientos no racionales desde el punto de vista agregado. Sin embargo, se ha ilustrado que no necesariamente son incluyentes, pues si se relajan ciertos supuestos del modelo BHW para que los agentes tengan más y mejores herramientas de comunicación, como un lenguaje amplio, es posible garantizar procesos de convergencia hacia situaciones socialmente correctas: si los agentes tienen la posibilidad de dar pequeñas variaciones a sus acciones ante pequeñas variaciones de las señales que reciben, tienden a captar información que era desconocida para la sociedad. Así, es imposible pensar que una manada pueda aparecer dentro de este tipo de estructura.
Finalmente se muestra que también es posible concebir un proceso de aprendizaje social eficiente aun con formación de manadas si los agentes tienen una memoria limitada no extrema. Es decir, en situaciones en las que es posible observar la elección previa de más de un agente, un mecanismo de aprendizaje social puede converger al conocimiento de la información inicialmente oculta, incluso si hay comportamiento de manada. De acuerdo con estos resultados, una manada se puede concebir como un mecanismo que no restringe totalmente el proceso de aprendizaje, resultado que concuerda con otros trabajos sobre el tema en distintas ramas del conocimiento. Por ejemplo, la sicología ha mostrado que la simple observación y la imitación son canales válidos de aprendizaje. Este hecho reafirma los elementos expuestos en este trabajo.
Este hecho pone de manifiesto la paradoja de la discrepancia entre racionalidad individual e irracionalidad de un conglomerado social. La interacción entre agentes racionales puede llevar a comportamientos completamente irracionales en el agregado, pues es posible que en el modelo BHW se forme una manada incorrecta, y de esta forma los agentes que maximizan su utilidad esperada terminan generando creencias públicas que distan bastante de los estados de la naturaleza que ocurren efectivamente. Como posibles extensiones de este estudio se podrían citar las siguientes: en primer lugar, sería conveniente explorar el efecto sobre cada uno de los modelos de considerar de manera endógena el ordenamiento del turno de elección de los agentes. Hemos supuesto que este ordenamiento es exógeno, y esta endogenización sería muy importante para tener una mejor aproximación al problema de la formación de manadas, ya que el momento en el que los agentes decidan tomar sus decisiones afectará el proceso de aprendizaje social.
En segundo lugar, y como parte fundamental de este campo de investigación, se podrían explorar métodos de validación experimental de los resultados teóricos9, es decir, determinar si los agentes en situaciones reales se comportan racionalmente y actualizan sus creencias de manera bayesiana. Si los resultados son negativos, el diseño de experimentos controlados permitirá elaborar hipótesis más descriptivas acerca del comportamiento individual.
Teniendo en cuenta lo anterior, un elemento importante en esta línea de investigación es la construcción de nuevas teorías del aprendizaje social en las que los agentes no sean racionales y no actualicen sus creencias mediante la regla de Bayes. Elaborar una teoría paralela del aprendizaje, donde se debiliten estas hipótesis dentro de una estructura ordenada y consistente, es sin duda un extenso campo de trabajo para la teoría económica. Hay muchas críticas a los supuestos en que se basan los modelos que hemos presentado. Pero aún no existe una vía alterna suficientemente estructurada que permita obtener resultados sólidos en materia de aprendizaje social. Quizás una de las razones sea la falta del instrumental matemático y estadístico apropiado para abordar estos problemas. Es necesario, por tanto, construir, por ejemplo, teoremas no bayesianos que permitan elaborar teorías lógicamente consistentes y más descriptivas. Así, estaríamos menos apremiados a utilizar herramientas matemáticas que no han sido ideadas para analizar este tipo de problemas. Estas nuevas teorías permitirían aproximarnos con mayor precisión a la comprensión del comportamiento humano.
NOTAS AL PIE
1. Simon (1979) y otros autores hacen un análisis muy cuidadoso de los alcances y limitaciones de esta hipótesis.2. Para un ejemplo de la aplicación de la regla de Bayes, ver Salop (1987).
3. Para otros modelos de manadas, ver Banerjee (1992), Lee (1993) y Scharfstein y Stein (1990).
4. Esta sección y la siguiente se basan en Chamley (2003).
5. Si el individuo es indiferente a las acciones x = 1 y x = 0, en esta sección y en la tercera sección suponemos que elige x = 0.
6. La media de la distribución privada del agente t resulta ser entonces una media ponderada entre la señal y la media de la distribución pública existente. La ponderación depende de la relación entre la calidad de la señal medida por 1/s2e y la calidad de la creencia pública medida por 1/s2t-1. Así, a mayor calidad de la señal, mayor importancia tendrá ésta dentro del proceso de actualización del valor esperado y viceversa.
7. De manera equivalente es posible mostrar que:
Por tanto, a medida que t tiende a infinito, at tiende a cero, lo cual implica que la media de la distribución pública tiende a ser constante.
8. Esta condición es la que Fudenberg y Banerjee (2003) denominan la condición de mínima información.
9. Ver, por ejemplo, Anderson y Holt (1996a y 1996b), Huck y Oechssler (1999), Smith y Sorensen (2000).
REFERENCIAS BIBLIOGRÁFICAS
1. Amemiya, T. Introduction to Statistics and Econometrics, Harvard University Press, 1994. [ Links ]
2. Anderson, L. y C. Holt. “Classroom Games: Understanding Bayes Rule”, Journal of Economic Perspectives 10, 1996a, pp. 179-187.
3. Anderson, L. y C. Holt. “Information Cascades in the Laboratory”, American Economic Review 87, 5, 1996b, pp. 847-862.
4. Bandura, A. “Self-Efficacy: Toward a Unifying Theory of Behaviour Change”, Psychological Review 84, 1977, pp. 191-215.
5. Bandura, A. y R. Walters. Social Learning and Personality Development, Rinehart and Winston, 1963. [ Links ]
6. Banerjee, A. “A Simple Model of Herd Behavior,” Quarterly Journal of Economics 07, 3, 1992, pp. 797-818.
7. Bikhchandani, S.; D. Hirshleifer y I. Welch. “A Theory of Fads, Fashion, Custom, and Cultural Change as Informational Cascades”, Journal of Political Economy 100, 5, 1992, pp. 992-1026.
8. Chamley, C. Rational Herds: Economic Models of Social Learning, Cambridge University Press, 2003. [ Links ]
9. Flanders, J. “A Review of Research on Imitative Behavior”, Psychological Bulletin 69, 968, pp. 316-337.
10. Fudenberg, D. y A. Banerjee. “Word-of-Mouth Learning”, Working Paper, Harvard University, 2003.
11. Hanson, W. y D. Putler. “Hits and Misses: Herd Behaviour and Online Product Popularity”, Marketing Letters 7, 4, 1996, pp. 297-305.
12. Huck, S. y J. Oechssler. “Informational Cascades in the Laboratory: Do They Occur for the Right Reason?”, Discussion Paper, Humboldt University, 1999.
13. Lee, I. “On the Convergence of Informational Cascades”, Journal of Economic Theory 61, 1993, pp. 395-411.
14. Locke, E. “Toward a Theory of Task Motivation and Incentives”, Organizational Behavior & Human Performance 3, 1968, pp. 157-189.
15. Luthans, F. “Contingency Theory of Management: A Path Out of the Jungle”, Business Horizons 16, 1973, pp. 67-72.
16. Maslow, A. Managerial Attitudes and Performance, Irwin, Illinois, Homewood, 1968. [ Links ]
17. Prendergast, C. y L. Stole “Impetuous Youngsters and Jaded Old-Timers: Acquiring a Reputation for Learning”, Journal of Political Economy 104, 6, 1996.
18. Salop, S. “Evaluating Uncertain Evidence with Sir Thomas Bayes: A Note for Teachers”, Journal of Economic Perspectives 1, 1987, pp. 155-160.
19. Scharfstein, D. y J. Stein. “On the Convergence of Informational Cascades”, The American Economic Review 80, 1990, pp. 465-479.
20. Simon, H. “Rationality as Process and as Product of Thought”, The American Economic Review 68, 2, 1979, pp. 1-16.
21. Skinner, B. Science and Human Behavior, New York, The Free Press, 1953. [ Links ]
22. Smith, L. y P. Sorensen. “Pathological Outcomes of Observational Learning”, Econometrica 68, 2, 2000, pp. 371-398.
23. Vives, X. “How Fast Do Rational Agents Learn?”, The Review of Economic Studies 60, 2, 1993, pp. 329-347.
24. Vroom, V. Work and Motivation, New York, Wiley, 1964. [ Links ]

