










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkUniversidad y Salud
Print version ISSN 0124-7107On-line version ISSN 2389-7066
Univ. Salud vol.13 no.2 Pasto July/Dec. 2011
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO ELECTROMECÁNICO PARA LA REHABILITACIÓN FÍSICA DE LA MANO DERECHA AFECTADA COMO SECUELA DE UN ATAQUE CEREBROVASCULAR
OPPORTUNISTIC GERMS IN LUNG INFECTION ASSOCIATED WITH PATIENTS WITH HIV / AIDS. UNIVERSITY HOSPITAL DEPARTMENTAL OF NARIÑO, 2006-2008
Carlos Andrés Criollo Paredes1, David Eduardo López Pantoja2, Mario Fernando Jojoa Acosta3
1 Ingeniero Electrónico - Estudiante Maestría Programa de Ingeniería Eléctrica y Electrónica Universidad de los Andes. e-mail: car_andres03@hotmail.com
2 Ingeniero Electrónico. e-mail: loq3s@hotmail.com
3 Ingeniero Electrónico. Ingeniero de Soporte Unidad de Informática y Telecomunicaciones. Universidad de Nariño. e-mail: mario@udenar.edu.co
Fecha de recepción: Junio 30 - 2011 / Fecha de aceptación: Octubre 18 - 2011
RESUMEN
El módulo de rehabilitación diseñado es un sistema compuesto por circuitos electrónicos para automatización y control de una órtesis robótica para mano, que colabora en la rehabilitación de la extremidad superior a nivel distal derecha de pacientes hemiparéticos con ataque cerebrovascular. La intencionalidad de movimiento es detectada a través de un sistema electrónico no invasivo de electromiografía, utilizando sensores ubicados sobre la piel (electrodos de superficie) que registran la actividad eléctrica de un músculo particular. El procesamiento de las señales adquiridas se realiza con un circuito de instrumentación acondicionado para manipular señales biológicas de pequeño voltaje. Una última etapa de procesamiento digital permite identificar el movimiento realizado. Cuando el paciente mueve su mano afectada, el sistema a su salida presenta una señal electromiográfica amplificada y sin componentes de ruido, que se utiliza como señal de control de los actuadores de la órtesis robótica automatizada para la mano derecha. El dispositivo diseñado contiene ejercicios para la extensión y flexión de la mano y para la extensión y oposición del pulgar.
Palabras clave: Electromiografía, hemiparesia, ataque cerebrovascular, órtesis, electrodo de superficie.
ABSTRACT
The designed rehabilitation moduleis a system compound by electronic circuits to automate and control a robotic orthotic for a hand. It cooperates in the upper limb rehabilitation in the right distal zone of hemiparetic stroke patients. The motion intention is detected by a noninvasive electronic electromyography system using sensors (surface electrodes) placed in skin surface to report electrical activity of a single muscle. An instrumentation circuit is designed for signal processing of acquired signals based on low voltage bio-signals treatment. A latest digital processing section identifies the kind of movement.When the patient moves his or heraffected hand, the out of the system presents an amplified electromyography signal without noise components that is used like a control signal in the actuators of automated robotic orthotics for the right hand. The designed device contains flexion and extension exercises of the right hand and extension and opposition of the thumb.
Key words: electromyography, hemiparesis, stroke, orthotics, surface electrode.
INTRODUCCIÓN
En un paciente con diagnóstico médico de ataque cerebrovascular secundario a una lesión en la arteria cerebral media izquierda de un año de evolución, se encontrará como secuela una hemiparesia derecha y déficit en la sensibilidad profunda viéndose afectada principalmente la propiocepción, que se traduce en una alteración en su neuro-mio-quinematica, afectando su fisiocinética y conduciéndolo a una deficiencia permanente y a una restricción en la participación para las actividades motoras gruesas y finas de la mano derecha.
El proceso de rehabilitación en personas con deficiencias motoras se ha visto mejorado con la inclusión de tecnología que optimiza el rendimiento y los resultados obtenidos. Cuando el paciente realiza una serie de movimientos con fines terapéuticos, su condición de movilidad se ve mejorada si lo hace con ayuda de equipos electromecánicos. Se ha comprobado en investigaciones anteriores que aquellos pacientes con ataque cerebrovascular (ACV) que reciben rehabilitación con la ayuda de este tipo de aparatos en combinación con fisioterapia presentan una mejor recuperación, lo cual les facilita llevar una vida más independiente que aquellos cuyo proceso de recuperación es sin el apoyo de estos dispositivos.1 Además para el profesional en fisioterapia es de gran importancia contar con estos equipos que a la vez que le dan al paciente mayor autonomía y mejoran su calidad de vida, son equipos de electroterapia que ayudan a realizar un Biofeedback en el paciente colaborando mucho más en el proceso de rehabilitación.2
MATERIALES Y MÉTODOS
El diseño del prototipo se basa en estudios médicos que soportan que la retroalimentación visual, auditiva y la colaboración en la elaboración del movimiento del miembro superior afectado puedan contribuir a reeducar una nueva zona del cerebro que retome las actividades de la zona que irrigaba el vaso afectado.3
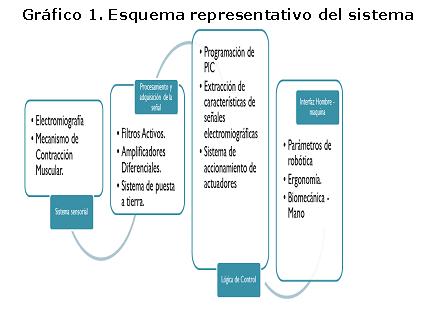
Es importante señalar que el proceso de rehabilitación es efectivo si el paciente es consciente de la realización del movimiento, por tanto el prototipo diseñado contiene un sistema electrónico con sensores que permite adquirir una señal electromiográfica (EMG) que representa la intencionalidad de movimiento del paciente, derivada de la actividad de los músculos comprometidos con el movimiento de la mano. Con el objetivo de utilizar dicha señal para controlar los actuadores de la órtesis robótica, el prototipo cuenta con una etapa de procesamiento de señales de pequeño voltaje basada en circuitos con amplificadores en modo diferencial, filtros activos y un sistema de puesta a tierra que garantizan conjuntamente la obtención de una señal amplificada cuyo voltaje oscila en un rango de 0 a 5 voltios, dependiendo de la fuerza muscular ejercida y sin componentes de ruido.4 Una última etapa de control utiliza la señal procesada para el accionamiento de los motores de la órtesis, siendo necesaria la inclusión de un circuito para determinación del tipo de movimiento basado en frecuencias y una etapa de potencia que acciona los motores.
Una representación esquemática de los componentes del prototipo implementado se muestra en el gráfico 1.
Electromiografía de superficie
Para la producción de fuerza muscular, pequeñas corrientes son generadas por las fibras musculares a partir del intercambio de iones a través de sus membranas. La señal EMG, puede ser medida con electrodos de superficie (método no invasivo), con la ventaja que puede ser dirigido por otro personal diferente a un médico con un riesgo mínimo sobre el paciente.
La amplitud de la señal EMG varía de µV hasta pocos mV.
Los electrodos con gel 3M® empleados, utilizan un gel electrolítico como interface química entre la piel y la parte metálica del electrodo.
Importantes consideraciones relacionadas con la adquisición y análisis de señales EMG fueron acordadas en un consenso multinacional llamado SENIAM (Surface EMG forthe Non- Invesive Assesment of Muscles).
La normativa SENIAM para electromiografía, aconseja los electrodos de cloruro de plata AgCl porque permiten que las corrientes en el músculo pasen libremente a través de la unión entre el electrolito y el electrodo. Además se introduce menos ruido eléctrico en la medida comparado con otros tipos de electrodos existentes.5
Como consideración en el diseño electrónico del sistema es importante conocer la impedancia piel-electrodo debido a que aunque el valor absoluto de la impedancia de los músculos no es un factor crítico, la estabilidad de esta a través del tiempo y la impedancia entre las posiciones de los electrodos tienen un efecto considerable sobre la relación señal/ruido de la señal EMG.
Se debe preparar la piel debido a que el contacto electrodo-piel genera un voltaje de corriente directa (DC) de salida generalmente provocado por partes de tejido muerto y secreciones de grasa. Una preparación adecuada de la piel realizando previa asepsia y antisepsia con alcohol y la utilización de un gel conductor, solucionan estos problemas.
Es importante resaltar que una señal EMG no siempre es una representación propia de la actividad eléctrica del músculo sobre el cual se ha posicionado el electrodo. En músculos pequeños los electrodos pueden detectar actividad de uno o más músculos vecinos y su señal puede interferir con la electromiografía del músculo deseado. La distancia entre electrodos para una medición efectiva es aproximadamente el radio de los mismos donde la amplitud de las componentes de la señales es mayor que la desviación estándar del ruido.
Considerando que la señal EMG provee un panorama de la actividad eléctrica en un músculo durante la contracción, dicha información es altamente dependiente de la ubicación del electrodo que recubre el músculo de interés.
Esta ubicación está definida como el posicionamiento de dos puntos bipolares en el músculo en relación a una línea entre dos puntos de referencia anatómicos. El objetivo de la ubicación de los electrodos es lograr un lugar donde se pueda obtener una señal EMG de buena amplitud y estabilidad. Para el estudio realizado, se emplean dos estrategias para la ubicación de los electrodos recomendadas por la normativa SENIAM:
Transversal: se ubica un arreglo bipolar de dos electrodos sobre el músculo haciendo que cada sensor esté lejos de la frontera con el músculo vecino, recubriendo el área de interés. Esto puede lograrse ubicando los electrodos en los compartimentos de un músculo grande y músculos vecinos subyacentes de la zona del electrodo. Esto significa que la línea entre los centros de los electrodos debe ser paralela al eje longitudinal del músculo.
Longitudinal: se ubica un arreglo de electrodos bipolar a medio camino de la línea media del músculo y la zonal distal del tendón. El objetivo es evitar que el electrodo cubra la zona de inervación o el tendón durante el rango de movimiento.6
Procesamiento de la señal
Mediante procesos de amplificación diferencial en electrónica, se logra la medición de señales EMG de bajo ruido y alta fidelidad. Se diseña una etapa de acondicionamiento con un amplificador operacional AD620AN utilizado ampliamente en electromedicina para la amplificación de señales del cerebro y del corazón. Posterior a esta etapa se implementa un filtro pasa-banda cuyo ancho de banda permite el paso del rango de frecuencias de la señal EMG que van de 10- 20 Hz hasta entre 500 y 1000 Hz. Finalmente se diseña una última etapa de amplificación para optimizar la obtención y digitalización de la información mediante una tarjeta de adquisición de datos NI-6008 de National Instruments®,para que pueda ser observada mediante software en el computador y así obtener un sistema de monitoreo de la señal. Se tienen en cuenta parámetros de diseño electrónico de mucha importancia como la impedancia de entrada, una buena relación de rechazo de modo común, supresión de componentes DC y un sistema de blindaje garantizando la eliminación de ruido.7
Lógica de control
Mediante el software OCTAVE se extraen características como voltaje, envolvente de la señal y los cruces por cero sobre el eje del tiempo. Para el cálculo de la envolvente se utilizan los conceptos matemáticos de señal analítica y transformada de Hilbert cuyo módulo es la envolvente pura de la señal. El objetivo de este estudio es construir un circuito con elementos almacenadores de energía cuyos parámetros de diseño como la frecuencia de resonancia y voltaje de entrada corresponden a las frecuencias y amplitudes de las señales EMG estudiadas en OCTAVE, que permitan identificar el tipo de movimiento que el paciente realizó (por ejemplo: extensión o flexión de la mano). La señal de salida es una señal piloto para el microcontrolador que se encarga de ordenar a la etapa de potencia qué motores en la órtesis debe activar.
Una vez construida esta etapa, se implementa el circuito electrónico de control. El microcontrolador PIC 16F877a que contiene un algoritmo desarrollado por los investigadores, programado en lenguaje C, controla la velocidad y activa o detiene los actuadores de la órtesis robótica de acuerdo a parámetros como intención de movimiento, finales de carrera o estado en reposo.
La principal variable a controlar son los sensores de contacto que indican el término del movimiento efectuado por el paciente (flexión, extensión de los dedos u oposición del pulgar) considerando como prioridad su seguridad. Con esto se garantiza una detención en los actuadores del equipo para prevenir daño al paciente. El gráfico 2 muestra el algoritmo que se desarrolló en el microcontrolador.8
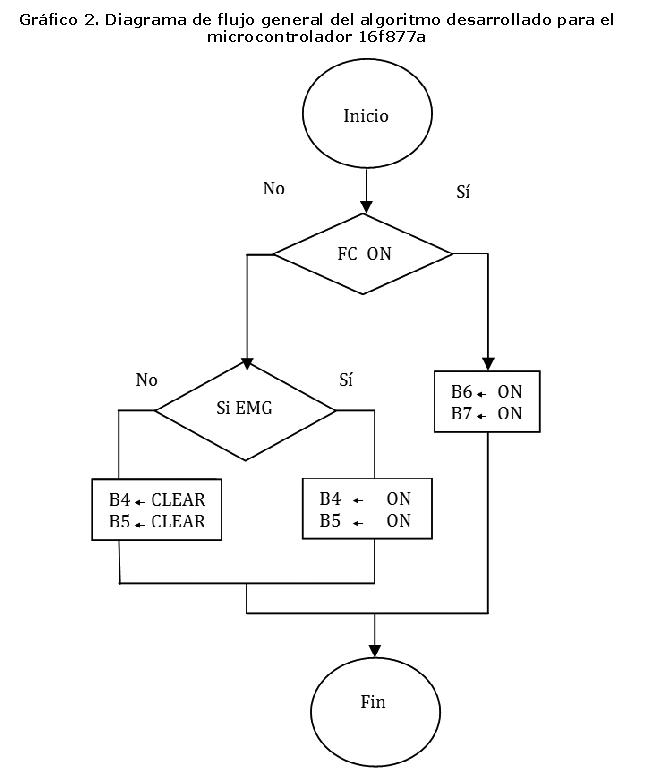
El algoritmo describe que cuando el terminal del microcontrolador final de carrera (FC) está activado (ON), los pines B7 y B6 del PIC encargados de mover motores en sentido contrario al movimiento efectuado, se activan, haciendo que el dispositivo libere la mano del paciente.
Si el final de carrera no está activado, es decir, el paciente está en proceso de realizar el movimiento o va a iniciar a hacerlo, se procede a comprobar si el paciente tiene intención de hacer dicha actividad. Si existe intención de hacer movimiento, los electrodos de superficie ubicados en el antebrazo captan la señal EMG que luego de ser procesada, será enviada a la lógica de comparación.
Esta lógica determina el tipo de señal e informa a la lógica de control el tipo de movimiento que se debe efectuar (Extensión, Flexión de dedos o Flexión de Pulgar) con el fin de que los actuadores permitan que el equipo ayude al paciente a efectuar el movimiento. Si no existe intención de hacerlo por parte del paciente, los actuadores no realizan ninguna actividad. Con estas condiciones, se garantiza que el paciente participará en el ejercicio de rehabilitación si es consciente de que quiere hacer el movimiento de mano, de otro modo, el equipo no estará activo para colaborar en dicho movimiento.
El algoritmo se extiende para cada uno de los movimientos teniendo en cuenta que se incluyen validaciones que el equipo necesita para su correcto funcionamiento.
Ortesis robótica
Para garantizar que el dispositivo sea cómodo y útil para el paciente, se utiliza para la construcción de la totalidad de la órtesis, polietileno de alta densidad, por características como: buena resistencia, solidez y flexibilidad. El dispositivo recubre parte del antebrazo y mano del paciente facilitando los arcos de movilidad articular de los dedos. Se diseñan anillos que sostienen las falanges de los dedos, los cuales son accionados por un actuador (micro-motor con relación de torque 30:1) mediante un sistema de transmisión con nylon, obteniendo como resultado una simulación biomecánica del movimiento anatómico de las articulaciones. Además la órtesis robótica cuenta con unas pestañas metálicas que funcionan como sensores de proximidad que detectan e informan a través de impulsos eléctricos que el movimiento ha finalizado, logrando que la lógica de control detenga los actuadores.
RESULTADOS Y DISCUSIÓN
Se construye un amplificador de ganancia 500, con un consumo de corriente de 1.3 mA, un excelente desempeño DC con un máximo de 50uV de offset, un desvío máximo de 0.6uv/ºC y una relación de rechazo en modo común de 140dB.9
La construcción de las etapas de filtrado mediante modelado de filtros Sallen-Key10 de varias etapas en cascada para obtener filtros pasabanda de orden superior, permiten una medida completa del ancho de banda de la señal EMG.
La sensibilidad del dispositivo de electromiografía, exige la construcción de un filtro notch, típicamente utilizado para eliminar las componentes de ruido en la señal provocadas por la línea de alimentación de corriente alterna (AC). Desafortunadamente, esta decisión presentó problemas si se considera que la señal EMG tiene una gran cantidad de contribuciones en estas frecuencias. Se toma la decisión de utilizar fuentes de corriente directa (baterías de 6V), que no presentaron mayor inconveniente debido al bajo consumo de corriente de los circuitos diseñados.
Si el paciente realiza movimientos bruscos, presenta fatiga, tiriteo y temblor en los músculos ocasionados por estrés, nerviosismo o porque se encuentra en una posición incómoda, el sistema detecta actividad muscular y activa los motores de la mano. La recomendación para el profesional en fisioterapia es controlar el miembro superior del paciente y hacer recomendaciones sobre relajación y posturas adecuadas para una buena ejecución del ejercicio.
Los gráficos 3 y 4 muestran las señales adquiridas por el equipo electromiográfico, graficadas en OCTAVE, con los electrodos posicionados en el antebrazo sobre el músculo palmar con una distancia de 1cm entre cada electrodo y con el sensor de tierra ubicado sobre el bíceps braquial. Cada una describe el movimiento completo y la intención de movimiento respectivamente, para la extensión de los dedos.
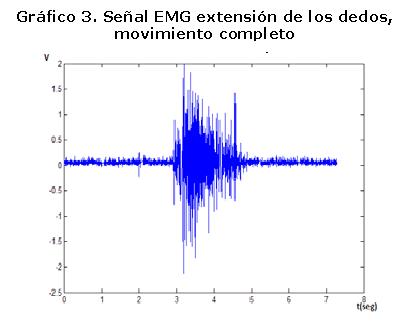
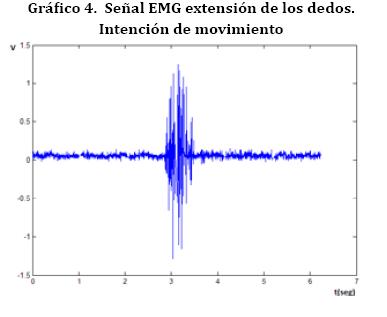
Dicho proceso se repite para el registro de actividad eléctrica en los músculos para la intención de movimiento y movimiento completo en la flexión de los dedos y la oposición del pulgar.
Los gráficos 5 y 6 muestran la órtesis robótica implementada y los anillos diseñados para cada falange. La sensibilidad del equipo electromiográfico permite obtener una señal EMG de buena amplificación y sin componentes de ruido para determinar el tipo de movimiento que el paciente pretende realizar, además la órtesis robótica tuvo éxito en la realización de los movimientos para la rehabilitación de la mano con la precisión deseada por el paciente, dándole al proyecto un resultado óptimo en la consecución de los objetivos.


Trabajos Futuros
Actualmente la órtesis robótica es probada con pacientes con previo tratamiento y autorización en el Centro de Fisioterapia Cyriax de la ciudad de San Juan de Pasto. El objetivo principal a futuro es realizar un estudio estadístico sobre el número de pacientes con resultados satisfactorios en la utilización del equipo y establecer el protocolo de pruebas a realizar.
CONCLUSIONES
La electromiografía de superficie es el método más indicado para realizar un estudio de detección de intencionalidad y reconocimiento de patrones de movimiento. La sensibilidad de un dispositivo como el diseñado requiere un sistema de puesta a tierra y blindajes confiable para evitar posibles componentes de ruido que afecten la medida. La órtesis robótica diseñada es una buena herramienta para realizar Biofeedback utilizado como parte del tratamiento de rehabilitación en conjunto con otras técnicas de manejo para este tipo de pacientes utilizadas en Fisioterapia.
El diseño de la órtesis abre las puertas para nuevos proyectos de producción de la misma en pro de lograr la rehabilitación de personas con accidente cerebrovascular que no cuenten con suficientes recursos económicos.
REFERENCIAS
1. Allan Ropper. Principios de Neurología, McGraw Hill, 8ed, 2007: 1379. [ Links ]
2. Kazuhisa Domen. Department of Rehabilitation Medicine, Hyogo College of Medicine. A case of improved upper-limb function of hemiparetic patient with constrained-induced movement therapy: JPN J Rehabil Med, Vol. 40, No. 12, Japan, 2004. [ Links ]
3. Ibíd. [ Links ]
4. Hussein S, Schmidt H, Volkmar M, Krüger J, Hesse S. Muscle activation of stroke patients during stair climbing in robot assisted gait training Proc. of IEEE Bio Rob 2008, Scottsdale, AZ, USA. [ Links ]
5. Seniam, Documentación HTML [Online]. 2011. Disponible en Internet. http://seniam.org/ [ Links ]
6. Ibíd. [ Links ]
7. Franco Sergio. Diseño con amplificadores operacionales y circuitos integrados analógicos. 3 Ed. México: McGraw-Hill Interamericana 2004. [ Links ]
8. Savant CJ. Diseño electrónico de circuitos. Pearson Education, 3ed, 2000. [ Links ]
9. Pertence A. Amplificadores operacionales y filtros activos. 1 Ed. México: McGraw-Hill, 2006. [ Links ]
10. Ibíd.
