










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Citado por Google
Citado por Google -
 Similares em
SciELO
Similares em
SciELO -
 Similares em Google
Similares em Google
Compartilhar

 Permalink
PermalinkCiencia e Ingeniería Neogranadina
versão impressa ISSN 0124-8170
Cienc. Ing. Neogranad. vol.23 no.1 Bogotá jan./jun. 2013
SELECCIÓN DE ACTUADORES Y SENSORES PARA EL TOBILLO Y LA RODILLA DE EMI-UMNG
EFFECTOR AND SENSOR SELECTION TO ANKLE AND KNEE OF EMI-UMNG
Eduardo Oliveros Acosta
Estudiante Ing. en Mecatrónica, Asistente de Investigación, Facultad de Ingeniería, Grupo de Investigación GIDAM.
Universidad Militar Nueva Granada, Bogotá, Colombia,
u1801559@unimilitar.edu.co
Virgilio Quintero
Ing. en Mecatrónica, Asistente de Investigación, Facultad de Ingeniería, Grupo de Investigación GIDAM.
Universidad Militar Nueva Granada, Bogotá, Colombia,
virgilio.quintero@unimilitar.edu.co
Nelson Velasco Toledo
Ing. en Mecatrónica, Docente Tiempo Completo, Facultad de Ingeniería, Investigador Grupo GIDAM.
Universidad Militar Nueva Granada, Bogotá, Colombia,
nelson.velasco@unimilitar.edu.co
Fecha de recepción: 17 de enero de 2013 Fecha de aprobación: 20 de mayo de 2013
RESUMEN
Los objetos pesados son transportados típicamente por vehículos de ruedas; sin embargo, muchos ambientes como laderas rocosas, escaleras, etc, plantean importantes desafíos para este tipo de sistema de locomoción. El Exoesqueleto para miembros inferiores de la Universidad Militar Nueva Granada (EMI-UMNG) es un sistema robótico que proporciona a su operador la capacidad para soportar cargas considerables con un esfuerzo mínimo sobre cualquier tipo de terreno. La actuación y control de un exoesqueleto presenta un problema de interés debido a la precisión para seguir lo movimientos de un usuario, evitando lesionarlo u obstaculizar la realización de tareas. Este artículo presenta el diseño y simulación del sistema de actuación del exoesqueleto, adicionalmente se presentan los criterios de selección para los sensores para cada una de las articulaciones. Se muestran parámetros cinemáticos como la máxima velocidad de desplazamiento de los actuadores en el sistema exoesquelético EMI (Exoesqueleto para Miembros Inferiores) de la Universidad Militar Nueva Granada.
ABSTRACT
Heavy objects are typically transported by wheeled vehicles, but many environments such as rocky slopes, stairs, etc., cause significant challenges to this type of locomotion. The lower limb exoskeleton for the Universidad Militar Nueva Granada (EMIUMNG) is a robotic system that provides to the operator the ability to withstand substantial loads with minimal effort on any terrain. The performance of an exoskeleton and control are problems of interest because of the precision to follow the movements of a user, avoiding injure or hinder task performance. This paper presents the design and simulation of the performance of the exoskeleton system additionally presents the selection criterion for sensors for each of the joints. Kinematic parameters are shown as the maximum speed of the actuators in the exoskeleton system EMI (Exoskeleton for Lower Limbs) of Universidad Militar Nueva Granada.
INTRODUCCIÓN
Los objetos pesados son transportados típicamente por vehículos con ruedas; sin embargo, muchos ambientes como laderas rocosas y escaleras, plantean importantes desafíos a los vehículos mencionados. Dentro de este contexto, la locomoción por medio de piernas robóticas se convierte en un método de transporte atractivo, debido a su gran adaptabilidad a una amplia gama de terrenos no estructurados. El Exoesqueleto Para Miembros Inferiores que actualmente se está desarrollando en la Universidad Militar Nueva Granada (EMI-UMNG), es un sistema robótico que proporciona a su operador la capacidad para soportar cargas considerables, con un esfuerzo mínimo además de permitir la locomoción sobre cualquier tipo de terreno. Lo anterior se logra a través de cinco elementos fundamentales: un sistema de control para gobernar la dinámica del sistema, actuadores y fuentes alimentación alta potencia generar el movimiento, comunicación entre controlador los dispositivos exoesqueleto convertir información unos dominios eléctricos a mecánicos eslabonamiento mecánico transmitir las fuerzas durante movimiento.
El diseño de un exoesqueleto es un reto significativo en cada una de las etapas del diseño, que van desde obtener una estructura resistente y segura para el usuario, hasta la implementación de las estrategias de control que aseguren el cumplimiento de la tarea sin afectar la libertad de la persona. Lo que se busca con el desarrollo de un exoesqueleto para miembros inferiores es aumentar la fuerza y resistencia de un usuario humano, mediante el acompañamiento al movimiento de las articulaciones y músculos de dicho usuario. Este dispositivo debe ser capaz de seguir fielmente cualquier movimiento que se vaya a ejecutar sin generar presión, cargas contrarias o movimientos fuera del rango natural. De no tenerse un sistema de actuación plenamente identificado, las estrategias de control generan situaciones donde el exoesqueleto podría provocar lesiones o impedir las actividades a realizar.
Este artículo presenta la primera etapa del desarrollo de EMI-UMNG, la cual comprende la estructura física o eslabonamiento que se adapta al cuerpo de una persona y que soportará las cargas o fuerzas necesarias para realizar los movimientos. De igual forma se presenta el análisis de dicha estructura mecánica para establecer la relación que existe entre el desplazamiento de los actuadores y el ángulo de giro de las articulaciones. Adicionalmente se presentan los métodos utilizados para dimensionar y seleccionar los actuadores y sensores que generarán y registrarán, respectivamente, los movimientos de la estructura. Los análisis presentados se orientan a utilizar un sistema neumático con actuadores de desplazamiento lineal. El análisis del diseño se realiza mediante una simulación,que hace uso de trayectorias predefinidas de la marcha. Los resultados obtenidos se refieren a la fuerza máxima de los actuadores, máxima velocidad y máximo desplazamiento para las articulaciones de tobillo y rodilla que poseen un comportamiento semejante que se aproxima bien a un movimiento de rotación pura sobre un eje. Se excluye del análisis a la articulación de la cadera puesto que esta articulación posee tres ejes de rotación y requiere un análisis individual, el cual se contempla dentro de una fase posterior del desarrollo.
1. ANTECEDENTES
Los primeros exoesqueletos activos aparecieron en la década de 1960 y principios de 1970 [1]en los que la generación de movimiento se lograba con actuadores eléctricos. Como ejemplo de ello se pueden mencionar: El proyecto Hardiman de General Electric (GE) [2] y el proyecto MihajloPupin del Instituto de Belgrado [3]. El proyecto Hardiman de GE fue un exoesqueleto de cuerpo completo que pesaba 680 Kg y era controlado mediante un sistema maestro-esclavo. El proyecto Mihajlo Pupin fue un robot para extremidades inferiores diseñado para ayudar a la rehabilitación de parapléjicos, el cual no se diseño para llevar cargas pesadas y únicamente seguía movimientos pre-programados para caminar.
Después de la década de 1970 la investigación en exoesqueletos para miembros inferiores era escasa. En 1993 la “University of California at Berkeley” presentó el proyecto “Electric Power Extender”[4]. Este es un exoesqueleto aplicado a todo el cuerpo usado para amplificar la capacidad humana a través de actuadores eléctricos, similar al proyecto Hardiman de GE. El proyecto Berkeley usaba sensores de fuerza para detectar la amplitud de la fuerza del humano, pero tenía muchas limitaciones para la marcha.
En el siglo 21 se ha retomado la investigación en exoesqueletos. En Japón, el Instituto de Tecnología de Kanagawa desarrolló un mecanismo de cuerpo completo (traje de vestir), potenciado únicamente por actuadores neumáticos [5]. Las fuerzas generadas por los actuadores se controlaban mediante la medición de la dureza de los músculos humanos involucrados en el movimiento. La falta de una fuente de alimentación portable limitaba las aplicaciones de este exoesqueleto.
EMI-UMNG es un exoesqueleto en desarrollo que se aplica solamente a los miembros inferiores. EMI-UMNG se compone de dos piernas robóticas, una fuente de alimentación y un soporte para dicha fuente [8]. EMI-UMNG proporciona capacidad de carga a través de locomoción por patas, guiado por la interacción humana. Al combinar la capacidad de fuerza de la robótica con la inteligencia artificial para el sistema de control y la capacidad de adaptación de los seres humanos, EMI-UMNG permite levantar cargas pesadas a través de cualquier tipo de terreno. Los usos posibles incluyen ayuda en el campo militar (soldados), trabajos de socorro o asistencia en labores
2. ESTRUCTURA MECÁNICA Y RELACIONES GEOMÉTRICAS
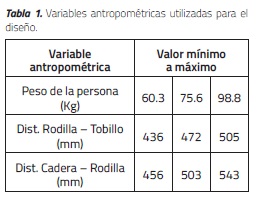
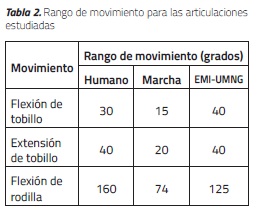
Esta sección muestra el desarrollo matemático realizado para establecer una relación entre el desplazamiento lineal de los actuadores y los ángulos de las articulaciones de tobillo y rodilla. Para establecer dicha relación se requiere un análisis del diseño mecánico de EMI-UMNG para el cual se consideraron parámetros varios antropométricos [6,7,9] (ver tablas 1 y 2).
2.1. ESLABONAMIENTO MECÁNICO DEL EXOESQUELETO
La figura (1) muestra una vista del isométrico (izquierda) de EMI-UMNG y el plano para una de las extremidades robóticas (derecha) con los segmentos de muslo (fémur) pierna (tibia) y pie, se ha excluido la cadera cuyo análisis está fuera del alcance de este trabajo por tener una configuración diferente a las otras articulaciones analizadas en este trabajo. El diseño corresponde a una arquitectura Pseudo-Antropomorfa que permite que el exoesqueleto se acople al cuerpo de un usuario humano y se sincronice con la marcha humana, evitando así obstrucciones o colisiones durante la locomoción. Para el diseño de la estructura, se requiere tener en cuenta la antropometría normal humana [9]. La tabla 1 muestra rangos de medidas de varios segmentos humanos, mientras que la tabla 2 muestra el rango de los movimientos considerados en el diseño.Como parte de la estructura se incorporaron rieleras y tornillos de fijación para permitir el ajuste de la estructura al rango de valores especificados en la tabla [8].
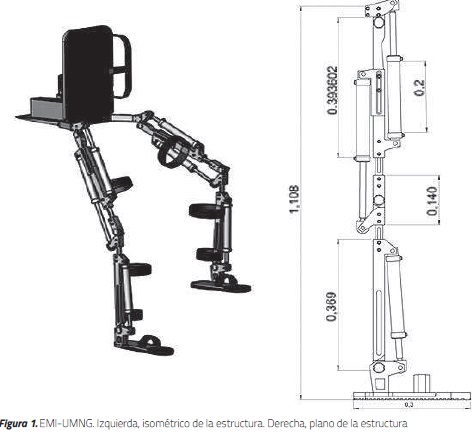
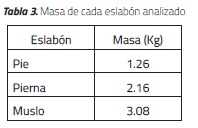
Luego de considerar varias opciones para el material de construcción, tales como acero, duraluminio, fibra de vidrio, fibra de carbono, etc. Se propone el uso de duraluminio teniendo en cuenta características como el costo y facilidad de adquisición y propiedades mecánicas como densidad, facilidad para el mecanizado, resistencia mecánica y vida útil. Las principales dimensiones de la estructura se pueden observar en la figura (1, derecha). Una vez seleccionado el material y teniendo las dimensiones de los eslabones de la estructura, desde el software de diseño se obtienen las masas de cada elemento. Estos valores se detallan en la tabla 3.
2.2. RELACIONES GEOMÉTRICAS ENTRE DESPLAZAMIENTO DEL ACTUADOR Y ÁNGULO EN LA ARTICULACIÓN
Para encontrar las relaciones geométricas entre el desplazamiento del actuador y el ángulo en la articulación se consideran los puntos de anclaje de los actuadores a la estructura y el eje de rotación de cada articulación. Conociendo las distancias entre los puntos mencionados se establecen relaciones geométricas, que se resuelven mediante ecuaciones trigonométricas sencillas. Este análisis se aplica de forma separada para la articulación del tobillo y para la articulación de la rodilla.
2.2.1. Articulación Tobillo
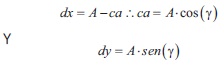
Para el análisis en la articulación del tobillo ver figura (2), se considera como posición inicial cuando el segmento A está perpendicular al segmento B. Se busca analizar el triángulo rectángulo mostrado en la figura (2, izquierda) conformado por los segmentos L1 y L2 y la hipotenusa LA, siendo esta última la longitud del actuador; cabe aclarar que los segmentos L1 y L2 siempre son perpendicular y paralelo, respectivamente, al segmento B.
En la subimagen de la figura (2), se muestra la misma articulación, girada un ángulo γ de valor conocido. El giro de la articulación se relaciona con un desplazamiento del punto de anclaje del actuador con el pie; ese desplazamiento a lo largo del eje x es denotado como dx y a lo largo del eje y como dy; el ángulo γ genera un nuevo triángulo rectángulo cuya hipotenusa es de longitud constante que corresponde al segmento A 0.055m. Conocidos entonces el ángulo γ y la hipotenusa del triangulo (A), por medio de identidades trigonométricas es posible calcular longitud cateto adyacente (ca) opuesto (dy). Conocidos dx dy, estos valores se restan a las longitudes L1 y L2 posición inicial respectivamente Teorema Pitágoras calcula triángulo L1L2LA figura (2 izquierda), que corresponde total actuador. variables L1(0.020m) y L2(0.3295m) son en inicial; centro) observa articulación con un giro indicado el ángulo γ, modificándose estas recalculan ecuaciones (1) (2). continuación muestra procedimiento desarrollado para obtener una expresión relaciona actuador articulación.
donde dx y dy se pueden conocer mediante:
Una vez conocida la relación matemática entre el ángulo γ y los segmentos L1 y L2, podemos obtener la longitud del actuador LA para un valor de ángulo en la articulación, longitud obtenida con el Teorema de Pitágoras (3).
En la ecuación (4) se presenta la forma desglosada para calcular la longitud del actuador en función del ángulo γ

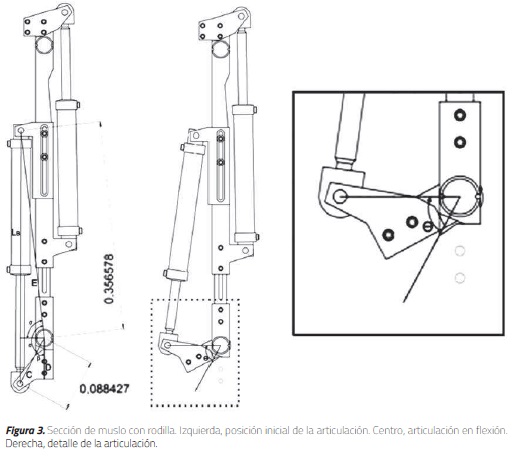
2.2.2. Articulación Rodilla
Para el análisis en la articulación de la rodilla se considera como posición inicial cuando el segmento de pierna y muslo están alineados (posición erguida del exoesqueleto), ver figura (3 izquierda). En esta configuración se forma un ángulo α entre los segmentos C y E de 145.23º. Los segmentos constantes C y E forman junto con la variable LA un triangulo, cuyo análisis arroja la longitud del actuador dependiendo del ángulo α. En la figura (3 centro), se muestra la misma articulación, girada un ángulo θ, es necesario expresar el valor del ángulo α en función del ángulo de entrada θ, resultando α= 145.23º -θ. Dado que se conocen las longitudes de los lados C y E y el ángulo α en cualquier instante, por medio del teorema del coseno (5) es posible calcular la longitud LB obteniendo así un modelo que relaciona la variación de la articulación de la rodilla con la longitud del actuador.
Reemplazando los valores se obtiene:

3. SIMULACIÓN Y CURVAS
En esta sección se toman datos de una simulación de la marcha humana, con los cuales se obtiene una expresión matemática que representa el ángulo de cada articulación en función del tiempo, al tener esta función es posible calcular teóricamente el valor de ángulo para cualquier instante de tiempo más allá del límite de resolución en tiempo de la simulación. La expresión obtenida nida se transformará en términos de desplazamiento de los actuadores usando las expresiones de la sección anterior (ecuaciones (6) y (4)). Una vez obtenidas las ecuaciones de desplazamiento en función del tiempo se derivan con respecto al tiempo para obtener las curvas de velocidad de los actuadores. Con estas ecuaciones se pueden obtener los valores máximos y mínimos para el desplazamiento y velocidad de los actuadores.
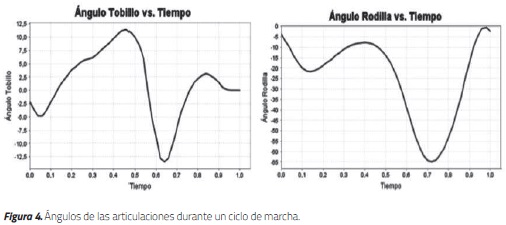
Los datos de los ángulos de las articulaciones en un ciclo de marcha se obtienen a partir de una simulación de la caminata humana desarrollada en el software OpenSim [11], este programa es de acceso público diseñado para crear modelos dinámicos del sistema musculo-esquelético. El modelo de caminata es uno de los ejemplos incluidos por los desarrolladores de OpenSim dentro del archivo descargable. La escala de tiempo de la simulación está normalizada a un ciclo de marcha, por lo tanto los valores de tiempo mostrados corresponde al porcentaje de ciclo de marcha. En la figura (4) se observan las curvas de ángulo vs tiempo del tobillo y rodilla para un ciclo de marcha.
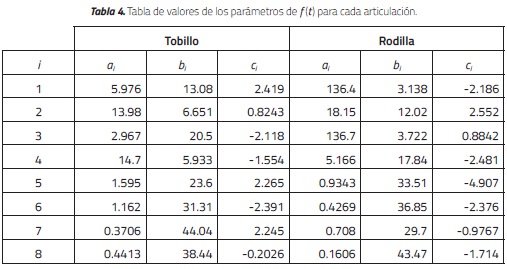
La obtención de la expresión matemática de ángulo en función del tiempo se obtiene mediante la aplicación de técnicas de regresión, para lo cual se utiliza el toolbox Curve-Fitting de Matlab, la aproximación escogida es la suma de funciones seno, la cual permite generar curvas suaves periódicas lo cual resultaría útil si va a trabajarse con varios ciclos de marcha. Con la aplicación del toolbox se obtiene una función f (t ) para la relación ángulo vs tiempo, ecuación (7), donde γ(t ) es la función específica para el tobillo y θ(t ) la función para la rodilla.

Los parámetros mostrados en la Tabla 4 corresponden a la función del tobillo y la rodilla con n 8.
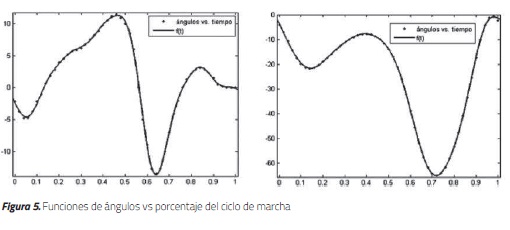
Los datos entregados por OpenSim y la aproximación obtenida mediante la regresión para las articulación del tobillo y la rodilla se pueden observar en la figura (5).
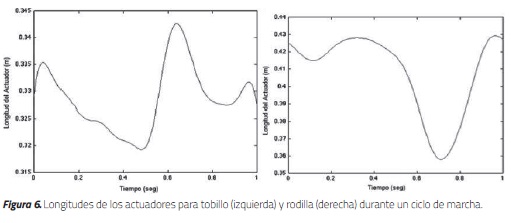
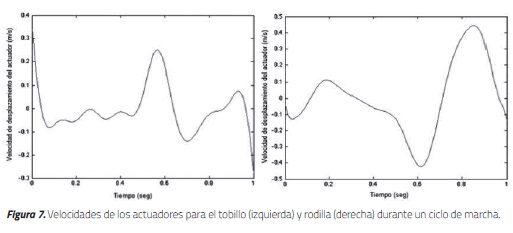
Con lo anterior es posible determinar valores para γ y θ en cualquier instante de tiempo, reemplazado en la ecuación (7) en (4) y (6) respectivamente se calcula la longitud del actuador LA(t ) y LB(t ). En la figura (6) se observan las gráficas de longitud vs. tiempo para los actuadores del tobillo y la rodilla. Con la herramienta "diff" de Matlab se obtiene la primera derivada con respecto al tiempo (velocidad) de LA(t ) y LB(t ) (ver figura (7)), para posteriormente establecer la velocidad máxima que es otro de los parámetros para el diseño del sistema de accionamiento del exoesqueleto.
4. SELECCIÓN DE LOS ACTUADORES Y SENSORES
El sistema encargado de generar el movimiento del exoesqueleto se basa en un accionamiento neumático, La opción de usar sistemas neumáticos se basa principalmente en los costos de los dispositivos y su disponibilidad en el mercado nacional [8]. Los principales parámetros para el diseño o selección de los actuadores son la distancia entre los anclajes, el máximo desplazamiento y la velocidad máxima. El primero de ellos se obtiene de mediciones directas sobre los planos del exoesqueleto, es importante mencionar que se deben tener en cuenta las graduaciones de la estructura según la estatura del usuario. El segundo parámetro es el desplazamiento máximo, esto se obtiene del análisis de las gráficas obtenidas del desplazamiento del actuador durante el ciclo de marcha (figura (6)) y por último la velocidad máxima que se obtiene del análisis de las gráficas correspondientes (figura (7)).
El dimensionamiento del sistema de accionamiento se realiza sobre el conocimiento de las cargas que debe soportar el exoesqueleto. Para tal fin se realizaron cálculos de cargas estáticas a fin de determinar valores máximos del torque que se debe aplicar sobre las articulaciones [10], luego desconociendo las distancias entre el punto de anclaje y el centro de rotación se calculó la fuerza máxima necesaria que debe aplicar el actuador.
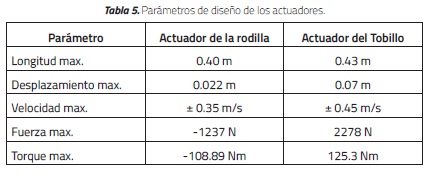
El siguiente cuadro resume los valores de los parámetros de diseño de los actuadores
Para determinar el diámetro necesario para los actuadores se realiza despejando el área de la siguiente ecuación:
Asumiendo una presión de trabajo de 8 bar para un sistema neumático y tomado la fuerza máxima para cada articulación se tiene que, el diámetro de para el actuador de la articulación del tobillo es de 6.05 cm y para el actuador de la articulación de la rodilla es de 4.51 cm. Para la implementación, se considera usar actuadores neumáticos referencia DSBC-63-100-PA-N3 de FESTO [13], que corresponden a un actuador de doble efecto, con diámetro de émbolo de 6.3 cm, carrera de 10 cm, presión de trabajo máxima de 12 bar.
Para el funcionamiento del sistema es necesario tener sensores que midan el desplazamiento de los actuadores, se escoge utilizar 2 sensores de desplazamiento MLO-POT-100-LWG FESTO [14], uno para cada articulación (tobillo, rodilla). Este un encoder análogo posición, basado en potenciómetro biela con una resolución 0.01 mm, carrera 10cm, bajo consumo corriente (10 µ A nominal), velocidad máxima 5 m/s, aceleración 200/s >2. De acuerdo al fabricante este sensor se recomienda para ser usado en disposición paralela a un actuador de desplazamiento lineal.
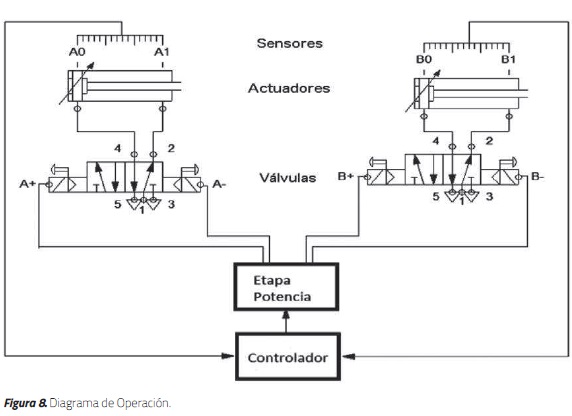
El accionamiento de los actuadores se realiza mediante una válvula posicionadora referencia MPYE-5-1/4-010-B [12] cuyo accionamiento es eléctrico con polarización hasta los 12 V, la presión máxima de trabajo es de 10 bar.
La Figura (8) muestra un diagrama que representa la configuración general del sistema neumático para una de las piernas robóticas, se indican las conexiones de los elementos mencionados previamente y un bloque de control que se encarga de compensar la posición de los actuadores de acuerdo a las lecturas de los sensores.
5. CONCLUSIONES
En este artículo se ha presentado una estrategia para seleccionar los actuadores y sensores de un sistema neumático acoplado a un exoesqueleto para miembros inferiores. La estrategia inicia por tener en consideración la antropometría para establecer las dimensiones de la estructura mecánica del exoesqueleto. Una vez se tiene el diseño de la estructura, se establece una relación entre el ángulo de las articulaciones y el desplazamiento de los actuadores neumáticos. Luego a partir de una simulación se establecen valores estimados para el ángulo de giro de las articulaciones. Posteriormente se construye, por medio de un algoritmo de regresión, una función de ángulo en función del tiempo que puede derivarse para obtener la velocidad. Mediante el análisis de estas funciones se puede conocer la máxima variación de ángulo y velocidad durante un ciclo de marcha normal. Usando la función que relaciona el ángulo y el desplazamiento de los actuadores, se obtienen el desplazamiento y velocidad máxima del actuador. Por medio de un análisis estático se determinó la máxima fuerza requerida por el actuador, lo que permite establecer las dimensiones del mismo. Adicionalmente se proponen los sensores y las válvulas que se acoplarían con los actuadores. Se estudiaron las hojas técnicas de los dispositivos mencionados para establecer que parámetros operación (presión trabajo, dimensiones, etc.) fueran coherentes con la aplicación.
En este trabajo se demuestra la utilidad de los datos de simulación para establecer variables de diseño, tales como los ángulos y velocidades de giro de las articulaciones de la rodilla y del tobillo de una persona promedio durante un ciclo de marcha, así como los torques y las fuerzas máximos y mínimo. Con la información recopilada durante las diferentes etapas del diseño, se puede realizar la validación del mismo, previa construcción de un prototipo de pruebas, lo que permite ahorrar tiempo y recursos.
Se realizó un estudio detallado de la cinemática del exoesqueleto, lo que resultó en una relación geométrica entre el desplazamiento de los actuadores y los ángulo formados por las articulaciones. Esta relación debe tenerse en cuenta para las futuras etapas del diseño del exoesqueleto, especialmente cuando se apliquen las técnicas de control puesto que es fundamental que el movimiento del exoesqueleto no afecte el movimiento del usuario.
El uso de dispositivos de un mismo fabricante permite tener compatibilidad entre ellos sin tener que recurrir a adaptaciones adicionales que podrían afectar el funcionamiento e integridad del sistema. Adicionalmente se cuenta con la asesoría técnica para correcta instalación y configuración de las partes.
En una próxima etapa del desarrollo se contempla el análisis detallado del mecanismo de la articulación de la cadera. Esta articulación merece un estudio detallado puesto que sus movimientos son más complejos que los de las articulaciones presentadas en este trabajo, cabe aclarar que para la rodilla y tobillo se consideraron solamente movimientos de flexión y extensión, mientras que la cadera requiere flexión y extensión, aducción y abducción y rotación interna y externa, lo que representa tres grados de libertad sobre una misma articulación. Una vez se tengan los datos de actuadores y sensores de la articulación de la cadera se podrá realizar la escogencia de las fuentes de alimentación del sistema neumático (compresor) y eléctrico (baterías).
REFERENCIAS BIBLIOGRÁFICAS
[1] Zoss, A.; Kazerooni, H.; Chu, A. (2005) On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX); International Conference on Intelligent Robots and Systems, pp 3465 - 3472. [ Links ]
[2] Makinson, B. (1971)Research and development prototype for machine augmentation of human strength and endurance. New York. National Technical Information Service. [ Links ]
[3] Vukobratovic, M.; Hristic, D.; Stojiljkovic, Z. (1974) Development of active anthropomorphic exoskeletons; Medical and Biological Engineering and Computing, Vol. 12, pp 66 - 80. [ Links ]
[4] Kazerooni, H.;Guo, J. (1993) Human extenders;Journal of Dynamic Systems, Measurement and Control, Vol. 115, pp 281 - 290. [ Links ]
[5] Yoshimitsu, T.; Yamamoto, K. (2004) Development of a power assist suit for nursing work; SICE 2004 Annual Conference, Vol. 1, pp 577 - 580. [ Links ]
[6] Restrepo M.; Estrada J.; Camacho J.; Parámetros antropométricos de la población laboral colombiana 1995. Universidad de Antioquia Instituto de Seguros Sociales, 1995. [ Links ]
[7] Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Morelos. Antropometría. Laboratorio de Producción, 2008. [ Links ]
[8] Morales Heredia, J. A. y Palacios Salamanca B. D.; Diseño mecánico y sistema de sujeción de un exoesqueleto para miembros inferiores; Bogotá, 2010, 85p. Trabajo de Grado (Ingeniero en Mecatrónica). Universidad Militar Nueva Granada; Facultad de Ingeniería. [ Links ]
[9] Gama Nathalia; Análisis cinemático y dinámico de la marcha normal humana. Bogotá, 2010, 35p, Trabajo de Grado (Ingeniero en Mecatrónica). Universidad Militar Nueva Granada; Facultad de Ingeniería. [ Links ]
[10] Ibañez Edwin; Sistema para la estimación de fuerza en los movimientos de flexión y extensión de rodilla; Bogotá, 2012, 74p, Trabajo de Grado (Ingeniero en Mecatrónica). Universidad Militar Nueva Granada; Facultad de Ingeniería. [ Links ]
[11] Delp SL, Anderson FC, Arnold AS, Loan P, Habib A, John CT, Guendelman E, Thelen DG. (2007) OpenSim: Open-source Software toCreate and Analyze Dynamic Simulations of Movement. IEEE Transactions on Biomedical Engineering. [ Links ]
[12] FESTO. Válvula proporcional de vías MPYE, manual On-line. Disponible en: http://www.festo.com/cat/es-co_co/products_MPYE_1. Consultado en Febrero 2013. [ Links ]
[13] FESTO. Cilindro normalizado DSBC, manual On-line. Disponible en: http://www.festo.com/cat/es-co_co/products_DSBC. Consultado en Marzo 2013. [ Links ]
[14] FESTO. Sistema de medición de recorrido MLO-POT-LWG, manual On-line. Disponible en: http://www.festo.com/cat/es-co_co/products_WMS_MLO_LWG_1. Consultado en: Marzo 2013. [ Links ]
