










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkCiencia e Ingeniería Neogranadina
Print version ISSN 0124-8170
Cienc. Ing. Neogranad. vol.24 no.2 Bogotá July/Dec. 2014
APLICACIONES PARA REDES VANET ENFOCADAS EN LA SOSTENIBILIDAD AMBIENTAL, UNA REVISIÓN SISTEMÁTICA
VANET APPLICATIONS FOCUSED ON ENVIRONMENTAL SUSTAINABILITY, A SYSTEMATIC REVIEW
Oscar Orozco Sarasti1, Gonzalo Llano Ramírez2
1 Ingenieroen Electrónica y Telecomunicaciones, Joven Investigador, Grupo de Investigación en Informática y Telecomunicaciones (i2t). Universidad Icesi, Cali, Colombia, oaorozco@icesi.edu.co
2 Ing. Electricista, Master en Tecnologías, Sistemas y Redes de Comunicación, Ph.D. en Ingeniería de Telecomunicaciones, Profesor tiempo completo, Facultad de Ingeniería, Departamento de TICs. Universidad Icesi, Cali, Colombia, gllano@icesi.edu.co
Fecha de recepción: 6 de febrero de 2014. Fecha de aprobación: 12 de mayo de 2014
Referencia: O. Orozco Sarasti, G. Llano Ramírez. (2014). Aplicaciones para redes VANET Estimación del exponente de Hurst y dimensión fractal para el análisis de series de tiempo de absorbancia UV-Vis. Ciencia e Ingeniería Neogranadina, 24 (2), pp. 111-132.
RESUMEN
La alta demanda de energía en sectores clave de la productividad incita a una búsqueda permanente de nuevas formas de utilizar los recursos naturales no renovables, que contribuya al mejoramiento de aspectos como sostenibilidad y eficiencia. Los Sistemas Inteligentes de Transporte Verdes buscan el mejoramiento de la movilidad, la reducción de la accidentalidad y la mitigación del impacto ambiental mediante la gestión inteligente del tráfico vehicular a través de las Tecnologías de la Información y las Comunicaciones (TIC). Este artículo presenta una revisión de las Redes Vehiculares Ad hoc (VANET), sus características y enfoques, además de la clasificación de sus aplicaciones, los modelos de movilidad utilizados, y una caracterización para el modelado del tráfico vehicular, junto con sus particularidades, en Colombia. Se concluye con la tendencia actual de simulación y el desarrollo futuro del proyecto de investigación.
Palabras clave: CRN, Modelo de Movilidad, OSA, Sistemas Inteligentes de Transporte Verdes, V2X, VANET, WAVE.
ABSTRACT
High energy demand in productivity key sectors promotes a constant search for new ways to use non-renewable natural resources that contribute to improve sustainability and efficiency. Green Intelligent Transportation Systems (Green ITS) aim to improve mobility, reduce accident rates, and mitigate environmental impact through intelligent traffic management using Information and Communication Technologies (ICT). This paper presents a systematic review of Vehicular Ad hoc Networks (VANET), their features and approaches, as well as the classification of their applications; it also presents the mobility models used and a description of a modeling approach of the vehicular flow in the Colombian roadways. The paper concludes by showing current simulation trends and the future development of the research project.
Keywords: CRN, Green ITS, Mobility Model, OSA, V2X, VANET, WAVE.
INTRODUCCIÓN
En los últimos años, los índices de gases de efecto invernadero (GEI) han crecido de manera alarmante debido al mayor uso de combustibles fósiles e hidrocarburos. Por ende, este incremento ha contribuido negativamente al calentamiento global [1]. Dos de los sectores de la economía que reportan más emisiones de GEI son los de industria y transporte, por lo que la Organización de Naciones Unidas (ONU) propone analizar y enfrentar el problema por sectores económicos en cada región [2].
En Colombia, el Plan Nacional de Desarrollo en el marco de la economía verde plantea a "la sostenibilidad ambiental como prioridad, elemento esencial del bienestar y principio de equidad con las futuras generaciones" [3]. Así pues, el transporte hace parte de los programas para el fomento de energías renovables. En años recientes, sectores como la industria automotriz, autoridades ambientales y Tecnologías de la Información y Comunicaciones (TIC) han unido esfuerzos para plantear soluciones en el marco de los Sistemas Inteligentes de Transporte (ITS) que abarquen tres aspectos: seguridad vial, transporte eficiente e impacto ambiental [4].
En vista de lo anterior surge una derivación de los ITS enfocada principalmente en el estudio de aspectos relacionados con el medio ambiente. El resultado se ha denominado Sistemas Inteligentes de Transporte Verdes o Green ITS (por sus siglas en inglés), cuyos servicios y aplicaciones están orientados a reducir el consumo de energía, mitigar las emisiones de GEI, optimizar el uso de la infraestructura vial y disminuir el índice de fatalidades ocasionadas por accidentes de tránsito, entre otros [5,6]. En este contexto, las Redes Vehiculares Ad hoc (VANET) poseen un alto potencial de desarrollo en cada una de las áreas de aplicación de los Green ITS y forman parte de ellos [7].
La naturaleza ad hoc de las VANET las distingue de otro tipo de redes vehiculares, como las formadas entre los distintos sensores con los que cuentan los automóviles modernos (sensores de parqueo, lluvia, frenado, velocímetros, giroscopios, GPS, etc.) y que se enfocan principalmente en brindar información al conductor. Debido a esto, las VANET presentan características especiales en aspectos como throughput, confiabilidad, velocidad de los nodos y utilización de ancho de banda en comparación con otras redes inalámbricas.
Con el fin de afrontar dichas características, la comunidad científica y académica ha realizado investigaciones que modelan ambientes vehiculares para facilitar la simulación de los mismos. Como resultado se han desarrollado modelos de movilidad adaptados a dichos ambientes, que buscan la predicción del comportamiento de los vehículos en las carreteras, y así lograr un mayor realismo de las simulaciones y una mejor cuantificación de los resultados que se obtengan [8].
Debido a las particularidades presentes en las vías colombianas (estilo de conducción agresivo, paradas inesperadas, vehículos antiguos, entre otras); las caracterizaciones de estos modelos de movilidad pueden ser poco viables al momento de trabajar con escenarios del país. Es por esto que se propone una adaptación del modelo de movilidad IDM teniendo en cuenta dichas particularidades. Por otra parte, el presente artículo presenta una revisión acerca de los simuladores actuales para redes VANET, sus principales características, falencias y las tendencias actuales en dicho campo.
1. REDES VANET
Las redes vehiculares se consideran una especialización de las Redes Móviles Ad hoc (MANET, Mobile Ad hoc Networks) y su principal diferencia es que los nodos están restringidos a moverse únicamente a lo largo y ancho de las vías. En una VANET, cada vehículo se define como un nodo de la red y está equipado con una unidad de comunicación a bordo denominada OBU (On-Board Unit) y una unidad de aplicación llamada AU (Application Unit). La función de la OBU es intercambiar información con otros vehículos o con puntos de acceso estacionarios ubicados alrededor de las carreteras, denominados RSU (Road-Side Unit); mientras que las AU hacen referencia a los dispositivos que muestran información al usuario. Generalmente se les da esta denominación a dispositivos como computadores portátiles, smartphones o pantallas ubicadas dentro del nodo y que se encuentran conectados a la OBU [9-10].
Los elementos que conforman las redes VANET al operar entre sí forman dominios, que hacen referencia a un conjunto de elementos lógicos y físicos que funcionan colectivamente para establecer comunicaciones entre nodos y RSU. Estos dominios se clasifican de acuerdo a su funcionamiento en [11-13]:
- Dominio en el vehiculo: conformado por la OBU y las AU del nodo; forman una red de comunicación bidireccional dentro del vehículo y pueden conectarse alámbrica o inalámbricamente.
- Dominio Ad hoc: este dominio hace referencia a la comunicación inalámbrica utilizada para enlazar los nodos entre sí o los nodos con las RSU. Dicha comunicación puede entablarse mediante el estándar presentado por la IEEE denominado IEEE 802.11p (junto con sus variantes específicas para seguridad, networking, gestión de recursos y operaciones multicanal) o mediante otras tecnologías inalámbricas (Wi-Fi®, WiMAX®, 3G, LTE, etc.)
- Dominio de infraestructura: formado por las redes de acceso y la infraestructura que soporta el acceso a Internet (backend) que solicitan los nodos y/o las RSU. La comunicación puede realizarse utilizando tecnologías cableadas y/o inalámbricas.
Los componentes y dominios descritos anteriormente se muestran en la Figura 1.

1.1.CARACTERÍSTICAS DE LAS REDES VEHICULARES
Se han definido dos tipos o escenarios de comunicación en las redes vehiculares: la comunicación inter-vehicular o vehículo a vehículo (V2V), en la que los automóviles intercambian mensajes directamente, y la comunicación vehículo a infraestructura (V2I), en la que el intercambio se realiza con las RSU, además de peajes y puntos de acceso a Internet. En conjunto, las comunicaciones V2V y V2I se conocen como V2X y sus principales características se describen a continuación [11,14-16]:
- Topología altamente dinámica: llega a describir una topología específica para una red VANET es particularmente exigente debido a la misma naturaleza de los vehículos. Los nodos están en constante movimiento y una comunicación V2I o V2V puede darse en muy poco tiempo, dificultando la identificación de una topología para éstas redes.
- Canales variables en tiempo y frecuencia: debido a la velocidad de los vehículos, a los ambientes donde circulan y a los posibles obstáculos para la señal inalámbrica (edificios, árboles, etc.), la comunicación puede sufrir desvanecimientos en tiempo o frecuencia con mayor intensidad que otras redes móviles.
- Autonomía: hace referencia a la libertad que tiene cada nodo de la red para acceder al medio, transmitir, enrutar y recibir paquetes cuando lo requiera sin estar bajo la influencia de un control centralizado. De modo que las OBU y las RSU manejan dichas tareas de manera independiente.
- Suministro de energía ilimitado: los nodos no tienen restricciones en el consumo de energía, dado que la batería de los vehículos proporciona una cantidad suficiente para la operación de la OBU y/o AU.
- Alta capacidad computacional: las OBU en los nodos deben manejar, dependiendo de la aplicación, elevados flujos de tráfico de red con baja prioridad (en un streaming de video) o bajas tasas de datos con alta prioridad (aplicaciones de seguridad). Además controlan el enrutamiento y la conexión con las RSU, por lo que los dispositivos requieren capacidad computacional para realizar dichas tareas simultáneamente y sin latencias muy elevadas (en especial en aplicaciones críticas).
1.2. ENFOQUES DE LOS SISTEMAS INTELIGENTES DE TRANSPORTE
El funcionamiento y operación de las redes vehiculares está ligado a protocolos, estándares, modelos de arquitectura y tecnologías que se utilizan para procesar la información y satisfacer las demandas de calidad relacionadas con las aplicaciones para este tipo de redes. Dichas tecnologías están sujetas a modificaciones por parte de los diversos organismos de estandarización a nivel mundial dependiendo de las necesidades de cada región.
Globalmente, dos de los enfoques más importantes en materia de desarrollo e investigación de las redes VANET son el enfoque norteamericano y el enfoque europeo; los cuales comparten ciertas similitudes, pero a su vez cada uno presenta características singulares.
1.2.1 Enfoque ITS por la IEEE
Estados Unidos ha sido uno de los pioneros en ITS, en donde se han puesto en marcha varios proyectos piloto y se han realizado diversos avances relacionados con redes vehiculares. En 1999, la Comisión Federal de Comunicaciones (Federal Communications Commission) asignó 75 MHz de ancho de banda en la frecuencia de 5,9 GHz para los servicios de ITS denominados DSRC (Dedicated Short-Range Communications). En el año 2002, la Sociedad Americana de Transporte Inteligente (Intelligent Transportation Society of America) recomendó la adopción de un único estándar para la capa física y para la capa de acceso al medio (MAC, Medium Access Control) propio de las VANET.
En consecuencia, en el año 2004 se consolidó el grupo de trabajo IEEE TFp (Task Force p) con el objetivo de definir una arquitectura de comunicación para entornos vehiculares basada en la tecnología inalámbrica para redes de área local IEEE 802.11, denominada IEEE 802.11p. Más adelante, el grupo de trabajo desarrolló un conjunto de especificaciones de las capas de red, transporte y aplicación para las comunicaciones vehiculares, que se denomina IEEE 1609 [17-18].
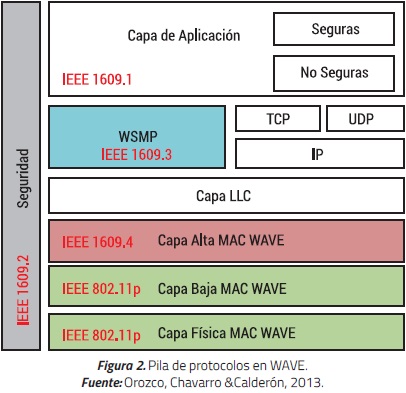
Los estándares IEEE 802.11p e IEEE 1609 definen el acceso inalámbrico en ambientes vehiculares, y se denominan WAVE (Wireless Access in Vehicular Environments). WAVE proporciona una arquitectura para las comunicaciones V2X, destinada al uso de aplicaciones de seguridad y eficiencia vial. La Figura 2 muestra la pila de protocolos de la arquitectura WAVE.
- IEEE 802.11p
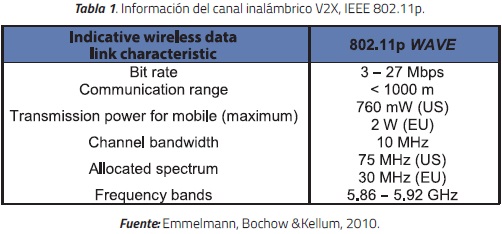
- Capa física (PHY): al igual que el protocolo IEEE 802.11a, el estándar IEEE 802.11p utiliza la transmisión multiportadora OFDM (Orthogonal Frequency Division Multiplexing). La Tabla 1 muestra las características asociadas al canal físico de IEEE 802.11p [19].
- Capa MAC: el propósito de la capa MAC es establecer los mecanismos de acceso al canal de comunicación, de manera que un conjunto de estaciones puedan compartir eficientemente el medio inalámbrico. El estándar IEEE 802.11p define el uso de CSMA/ CA (Carrier Sense Multiple Access/Collision Avoidance) para las comunicaciones V2X. La capa MAC también considera aspectos de la transmisión como la probabilidad de recepción de paquetes, el tiempo de acceso al canal, el control de congestión y la priorización de los mensajes [20].
- IEEE 1609
- IEEE 1609.0: define la arquitectura general de WAVE, el modelo de comunicación, los mecanismos de acceso al medio inalámbrico en ambientes vehiculares, la estructura general de los componentes como OBU, RSU e interfaces WAVE.
- IEEE 1609.4: describe la operación multicanal que implementa la capa física, incluyendo los parámetros para la priorización de mensajes, temporizadores, conmutación del canal y primitivas diseñadas para el funcionamiento multicanal.
- IEEE 1609.3: describe los servicios de la capa de red para entornos vehiculares, especifica las funciones de enrutamiento y direccionamiento basados en el nivel 3 del modelo de referencia OSI y de los protocolos IP, UDP, TCP y WSMP.
- IEEE 1609.2: especifica los servicios de seguridad en los sistemas WAVE, define los formatos de los mensajes y su procesamiento.
- IEEE 1609.1: describe el administrador de recursos (RM, Resource Manager) en los sistemas WAVE, que permite a una OBU con capacidad de cómputo limitada ejecutar procesos de manera remota.
El estándar IEEE 802.11p define las características de la capa física y MAC necesarias para operar en un ambiente vehicular.
La familia de estándares IEEE 1609 define los aspectos de operación y gestión de la capa de red, de transporte y de aplicación de la arquitectura WAVE. A continuación se describe brevemente cada estándar [21-25]:
1.2.2. Enfoque ITS por la ETSI
Europa ha desarrollado su propio enfoque de ITS, que posee ciertas similitudes y diferencias en comparación con el enfoque de la IEEE; estas últimas básicamente se aprecian en la utilización de protocolos propios europeos en la capa MAC (como el Control de Congestión Descentralizado (DCC, Decentralized Congestion Control)) [26]. Éste se desarrolla en conjunto por varias entidades, entre las cuales se resaltan el proyecto investigativo COMeSafety, el Comité de Estandarización Europeo (CEN, European Committee for Standardization), además de todos los grupos de trabajo de la ETSI TC ITS (WG, Working Groups), cada uno con un énfasis en cada aspecto de la arquitectura de red.
- Modelo de arquitectura ETSI TC ITS
- Capa Seguridad ITS: de la capa seguridad ITS se encarga el grupo de trabajo WG-5. En esta se describe todo lo relacionado con la seguridad y protección de la privacidad, especialmente de las aplicaciones ITS, esto es, velar por la autenticidad, confidencialidad, autoridad e integridad de la información ante posibles ataques.
- Capa Gestión ITS: la capa ITS de gestión es una capa común a las demás capas ITS que están en el plano horizontal. Esta se encarga del intercambio de información entre todas las capas del modelo de arquitectura ETSI TC ITS, con el fin de generar una correcta integración operacional entre los múltiples protocolos y tecnologías que operan en una red vehicular. Entre las principales funciones que se implementan en esta capa se incluyen la selección dinámica de la tecnología de acceso para una determinada aplicación, el seguimiento de los parámetros de las interfaces de comunicación, la gestión de los servicios, de los permisos y las prioridades de transmisión y la implementación de mecanismos de control de congestión.
- Capa Aplicaciones ITS: el enfoque europeo es más específico que el americano en cuanto a la categorización de aplicaciones y describe un conjunto básico de aplicaciones definido por la ETSI TC ITS en la ETSI TR 102 638, donde se encuentran:
- Seguridad vial activa
- Eficiencia cooperativa de tráfico
- Servicios locales cooperativos
- Servicios globales de internet
- Capa Habilidades ITS: la capa de habilidades ITS está estrechamente ligada con Aplicaciones ITS, dado que le provee la información de apoyo, de comunicación y de otras aplicaciones, encargándose de esta manera del mantenimiento y de la continua actualización de toda la información del ambiente de la red vehicular, incluidos los servicios de mensajes de advertencia cooperativa (CAM, Cooperative Awareness Message) y los mensajes de notificación de entorno descentralizado.
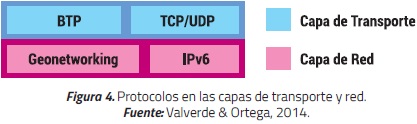
- Capa Red & Transporte ITS: la capa ITS de Red y Transporte se subdivide en las capas de red y transporte, como lo muestra la Figura 4. Se presenta el protocolo básico de transporte (BTP, Basic Transport Protocol), diseñado por la ETSI para tráfico con bajo sobre-encabezamiento. Se observa que hay soporte a Internet a través de TCP/UDP o IPv6. Por último, también se encuentra el concepto de geonetworking, diseñado por la ETSI, que básicamente consiste en un conjunto de protocolos que describen la forma en la que se llevan a cabo las transmisiones de paquetes entre los nodos de la red.
- Capa Tecnologías de Acceso. Esta capa se subdivide entre la capa física y la capa MAC, como lo muestra la Figura 5. Las dos son muy similares con las capas homologas del stack de protocolos WAVE, tratado anteriormente, con la salvedad de que en MAC no se utiliza el protocolo 1609.4 y en lugar de este, se implementa el mecanismo de control de congestión descentralizado (DCC, Decentralized Congestion Control).
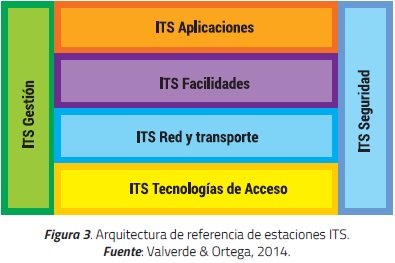
En la Figura 3 se observa la arquitectura de comunicación ITS por la ETSI, que se compone de cuatro capas horizontales, además de contar con gestión y seguridad "horizontal" en cada capa.

2. APLICACIONES Y MODELOS DE MOVILIDAD
2.1. APLICACIONES VEHICULARES
Las VANET proporcionan una oportunidad para el desarrollo de aplicaciones que mejoren las condiciones de transporte y tráfico vehicular mediante sistemas colaborativos basados en comunicaciones V2X. Según la función, las aplicaciones vehiculares se clasifican en tres categorías: seguridad vial, eficiencia vial y servicios comerciales y de información [27].
2.1.1. Aplicaciones en seguridad vial
Estas aplicaciones tienen como función monitorear y recolectar continuamente información acerca del estado de las vías con el fin de prevenir accidentes y percances. Son el soporte primordial para el estudio y evaluación de técnicas y procedimientos a implementar en redes vehiculares y se pueden agrupar en tres sub-categorías [28]:
- Prevención de colisiones (Collision Avoidance): en este tipo de aplicaciones la RSU detecta el riesgo de una colisión entre dos vehículos y advierte a los conductores mediante la OBU. Entre las aplicaciones se encuentran:
- Advertencia de colisiones en intersecciones.
- Alertas por vehículos en sentido contrario.
- Advertencia de cambio de carril.
- Alarma de conducción peligrosa.
- Notificación de señales de tránsito (RSN, Road Sign Notification): la función de este tipo de aplicaciones es advertir a los conductores sobre la señalización vial y brindar asistencia durante el recorrido. Algunos ejemplos de aplicaciones RSN son:
- Advertencia de velocidad en curva.
- Advertencia de violación de señal de tránsito.
- Gestión de incidentes (Incident Management): estas aplicaciones se emplean en situaciones de emergencia ante un accidente de tránsito. Entre este tipo de aplicaciones se destacan:
- Alarma de vehículo de emergencia.
- Advertencia post-colisión/choque.
2.1.2. Aplicaciones de eficiencia de tráfico
El propósito de estas aplicaciones es mejorar las condiciones del tráfico mediante la gestión y el monitoreo del tránsito de vehículos y las condiciones de las vías. Es necesario destacar que las dos aplicaciones propuestas para el desarrollo futuro del proyecto de investigación recaen en esta clasificación, dado que están enfocadas hacia el mejoramiento de la movilidad y la eficiencia energética. De acuerdo a su función, las aplicaciones de eficiencia se dividen en dos sub-categorías:
- Gestión del tráfico: estas aplicaciones procesan información sobre el flujo vehicular y controlan desde las RSU hasta elementos del sistema de trasporte como las luces de los semáforos y el cobro de peajes. Entre este tipo de aplicaciones se encuentran:
- Control inteligente del tráfico.
- Peajes libres de tráfico.
- Aviso de velocidad óptima (OSA).
- Guía de ruta y navegación mejorada.
- Notificación de congestión vial (CRN).
- Monitoreo del tráfico: las aplicaciones monitorean los vehículos y las condiciones de las carreteras y en caso de irregularidades notifican a los conductores y a las autoridades de tránsito. Algunas de éstas aplicaciones son:
- Monitor de condiciones viales.
- Agente de seguimiento y localización vehicular.
- Placas/Licencias de conducción electrónicas.
2.1.3. Aplicaciones de información y entretenimiento (infotainment)
Este tipo de aplicaciones se enfocan en brindarle a los conductores y a los pasajeros servicios de entretenimiento e información.
- Entretenimiento: estas aplicaciones ofrecen a los ocupantes de los vehículos la posibilidad de hacer uso de los recursos de la red para fines de recreación; ya sea a través de las RSU o a través de puntos de acceso Wi-Fi® dispuestos en la carretera, los usuarios pueden navegar en Internet, jugar en línea, ver contenidos multimedia, entre otras actividades [29].
- Información del contexto: estas aplicaciones le ofrecen a los conductores información sobre sitios de interés, atracciones locales y servicios basados en localización. Algunos ejemplos se nombran a continuación:
- Actualización y descarga de mapas.
- Ubicación y reserva de estacionamiento.
- Información de sitios de interés.
2.2. MODELOS DE MOVILIDAD
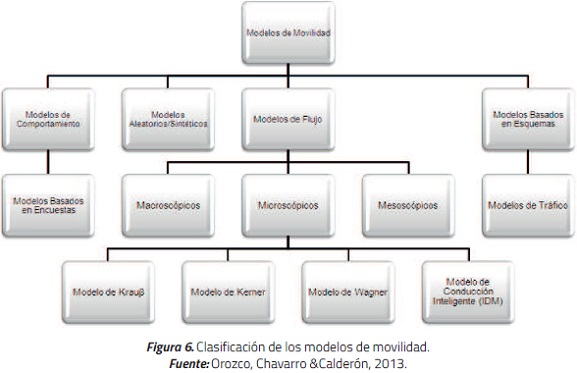
Específicamente, los modelos de movilidad hacen referencia al patrón de movimiento de los nodos en una red ad hoc y determinan la ubicación de éstos en la topología en un instante de simulación dado. Además describen el cambio de posición, velocidad y aceleración de los nodos en el tiempo [29-30]. Los modelos de movilidad en redes vehiculares se clasifican de acuerdo a las características con que describen el patrón de movimiento de los nodos. Hay cuatro clasificaciones para los modelos de movilidad, las cuales se describen en la siguientes subsecciones.
2.2.1. Modelos aleatorios (Random Models)
Los modelos aleatorios describen el movimiento de los vehículos mediante patrones generados aleatoriamente y especifican situaciones en las cuales los nodos tienen la libertad de moverse en cualquier dirección y con distintas velocidades. Para el caso de las redes VANET, los modelos de movilidad aleatorios son poco utilizados debido a que los vehículos están restringidos a moverse a lo largo y ancho de las vías y no pueden tomar caminos aleatorios o desordenados. Entre los modelos de movilidad aleatorios se destacan [31]:
- Ramdom Waypoint Mpdels (RWM)
- Ramdom Walk Mpdels (RWALK)
- Referens Point Group Mobility Mpdels (RPGM)
2.2.2. Modelos de tráfico (Traffic Models)
Los modelos de tráfico se basan exclusivamente en estudios teóricos de tráfico para tratar de cuantificar una topología de red. Estos modelos establecen el patrón de movimiento de los vehículos en las simulaciones con base en teorías de tráfico, lo que contribuye a lograr simulaciones detalladas del flujo vehicular pero, al igual que los modelos aleatorios, el no incluir características propias de redes vehiculares y sus nodos (como el estilo de conducción, la longitud de los vehículos, el espacio entre vehículos en intersecciones, etc.) hace que sean utilizados únicamente para estudios particulares [32].
2.2.3. Modelos de flujo (Flow Models)
Con el fin de incrementar el nivel de realismo en los modelos de movilidad, los modelos de flujo consideran la interacción entre los vehículos y su entorno. Existe una sub-clasificación de acuerdo a la granularidad del modelo [33]:
- Microscópicos: describen el comportamiento y los parámetros de movilidad de cada uno de los vehículos y la interacción entre ellos, como la distancia intervehicular, la velocidad, la aceleración, desaceleración, tiempo de reacción ante un evento, entre otros. Los modelos microscópicos son los más apropiados para la simulación de redes vehiculares.
- Macroscópicos: estos modelos describen a nivel general el comportamiento del flujo, la densidad y la velocidad de un "bloque" o conjunto de vehículos.
- Mesoscópicos: combinan las propiedades de los modelos microscópicos y macroscópicos.
2.2.4. Modelos de comportamiento (Behavorial Models)
Dado quelos modelosdemovilidad generalmente se enfocan en describir las características de los vehículos, vías y demás, surgió una clasificación adicional para algunos modelos que se centran en describir el comportamiento de los conductores antes que otras variables. Es por esto que los modelos de comportamiento toman como variables más relevantes el estilo de conducción de las personas y sus posibles reacciones ante eventos, con el fin de evitar patrones de movimiento aleatorios. Los datos obtenidos mediante estos modelos se ajustan a simuladores computacionales con el fin de analizar sus posibles consecuencias en redes VANET [34].
La Figura 6 muestra un resumen de la anterior clasificación de los modelos de movilidad en el que también se han adicionado cuatro modelos de movilidad microscópicos, que son los más relevantes al momento de realizar simulaciones de redes VANET.
Una característica importante de algunos modelos de movilidad es su flexibilidad y facilidad con que permiten ser adaptados a condiciones particulares de trabajo. En consecuencia, surgen modelos propios, especificados por autores para cumplir requerimientos puntuales. Por esta razón se ha propuesto [35-37] un mapa conceptual con las principales variables que componen un modelo de movilidad. De este mapa se realizan especializaciones dependiendo de los requerimientos particulares de cada proyecto. Debido a esta flexibilidad de ciertos modelos de movilidad, se propone una adaptación de dicho mapa al entorno colombiano, puesto que existen particularidades que únicamente se presentan en este contexto. El mapa se observa en la Figura 7.
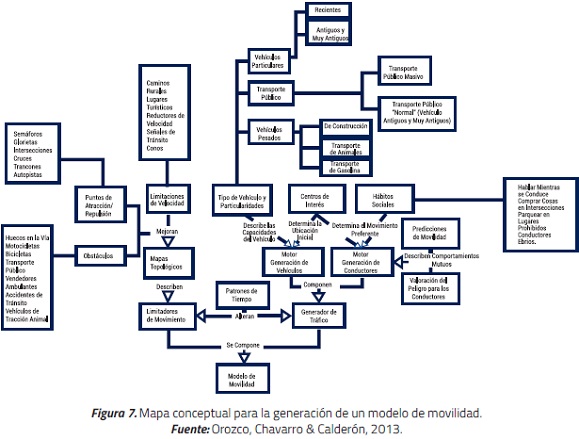
Profundizando en las particularidades que se presentan en las carreteras colombianas, pueden llegar a presentarse diversas situaciones que afectan la movilidad y, por ende, el modelo de movilidad de los vehículos. A continuación se presenta la descripción de los obstáculos que sortean los vehículos y que están explícitos en la Figura 7.
- Huecos en la vía: los huecos en la vía afectan la movilidad de los nodos y, por consiguiente, el modelo de movilidad debido a que hacen que los conductores cambien de carriles repentinamente o disminuyan su velocidad drásticamente. Esto hace que el modelo de movilidad que puedan estar siguiendo un conjunto de vehículos cambie repentina e inesperadamente, afectando con esto procesos de comunicación vehicular.
- Motocicletas: las motocicletas son consideradas como obstáculos debido a que, generalmente, no hacen parte de la red VANET. Es decir, no son nodos móviles de las redes vehiculares. Asimismo, debido a la agresividad de algunos conductores de motos, pueden convertirse en obstáculos para los vehículos dadas sus maniobras agresivas de adelantamiento.
- Bicicletas: al igual que las motocicletas las bicicletas algunas maniobras imprudentes de los ciclistas pueden afectar el movimiento de los vehículos para tratar de evitarlas. Cabe destacar que, aunque es casi habitual ver motocicletas o bicicletas que afecten el movimiento de los automóviles en carreteras colombianas, no es un problema exclusivo del país: también se da en países donde el número de motos y bicicletas es alto (India y China particularmente).
- Transporte público: el transporte público es una de las causas por las cuales pueden generarse congestiones vehiculares (debido al tamaño de los vehículos). Además, la inadecuada costumbre de parquearse a recoger y/o dejar pasajeros en cualquier sitio por parte de los conductores de este tipo de vehículos hace que la movilidad y los modelos de movilidad sean afectados.
- Vendedores ambulantes: dada la situación económica del país, los vendedores ambulantes en semáforos, cruces e intersecciones de las vías colombianas no son novedad. En consecuencia, los conductores que compran los productos que ofrecen estas personas pueden llegar a provocar un pequeño embotellamiento mientras realizan la transacción comercial. Aunque el tiempo que se detienen a comprar es poco, esto de alguna manera puede provocar cambios de carriles por parte de los nodos detrás del auto detenido, afectando así el modelo de movilidad.
- Accidentes de tránsito: los accidentes de tránsito afectan la movilidad de las vías de todo el planeta. al presentarse masivamente (como en Estados Unidos) pueden detener totalmente el flujo de vehículos sobre la vía en cuestión. En Colombia son causantes de la muerte de alrededor de 6000 personas cada año y afectan significativamente los modelos de movilidad al modificar el estado normal de la vía.
- Vehículos de tracción animal: vehículos de tracción animal son una particularidad de las vías colombianas y pueden afectar la movilidad vehicular al momento de ser sobrepasados por los vehículos o si presentan comportamientos agresivos.
Siguiendo con la descripción de los tópicos presentes en el mapa conceptual de la Figura 7, se tienen varios puntos de atracción y repulsión en donde los vehículos están más cerca y lejos respectivamente. La descripción de dichos puntos se presenta a continuación.
- Semáforos: los semáforos son considerados puntos de atracción debido a que los automóviles, al esperar el cambio de rojo a verde, permanecen juntos por dicho instante de tiempo. Esto puede llegar a modificar el modelo de movilidad que traían los nodos antes de realizar la parada en el semáforo.
- Glorietas: Las glorietas también son puntos de atracción dado que los nodos se ven obligados a detenerse para ceder el paso a los nodos que estén circulando por ésta. De manera que los carros que vengan detrás se verán obligados a disminuir su velocidad y, por ende, pueden llegar a afectar el modelo de movilidad que estaban siguiendo antes de la glorieta.
- Intersección/Cruce: al igual que las glorietas y semáforos, las intersecciones o cruces obligan a disminuir la velocidad que llevan los nodos.
- Embotellamientos: los embotellamientos o trancones son los puntos de atracción más críticos, debido a que la velocidad de los nodos es casi nula y no pueden circular libremente. Es la situación en la que están más tiempo los autos cerca, y pueden llegar así a afectar el modelo de movilidad.
- Autopistas: a diferencia de los anteriores las autopistas pueden considerarse puntos de repulsión dadas las altas velocidades que puedan alcanzar los nodos y el movimiento casi independiente en relación con otros vehículos que circulan por dichas vías.
Con respecto a las limitaciones de velocidad mostradas en la Figura 7, a continuación se presenta una breve descripción de cómo pueden afectar la generación de modelos de movilidad.
- Caminos rurales: los caminos rurales en Colombia no presentan las mismas condiciones que las vías principales. Generalmente son caminos sin pavimentación y con arena o piedras, lo que hace que los vehículos que transitan por éstos lo hagan a velocidades reducidas. Es por esto que la circulación de nodos por estos caminos afecta la velocidad y, por ende, el modelo de movilidad.
- Lugares turísticos: los puntos turísticos de las ciudades de Colombia están restringidos para la movilidad vehicular, hasta tal punto de prohibirla por completo en algunos sitios. Por los que se puede transitar con vehículos, se debe hacerlo a bajas velocidades debido al alto número de peatones presentes en la vía y sus alrededores. Por esta razón, estos lugares presentan limitaciones de velocidad para los autos.
- Reductores de velocidad: hacen referencia a los elementos conocidos como policías acostados y a otro tipo de elementos en la vía que cumplen la función de disminuir la velocidad de los nodos. Se ubican generalmente en vías donde la accidentalidad es considerable y afectan principalmente la movilidad de los vehículos al obligarlos a reducir su velocidad y/o a cambiar de carril por adelantar autos que circulan por dichos reductores a velocidades más bajas.
- Señales de tránsito: aunque en Colombia el respeto hacia las señales de tránsito no está en los niveles deseados, para una conducción segura deben acatarse y respetarse, ya sean las señales que indican la velocidad máxima permitida o señales de aviso. En especial las señales que limitan la velocidad máxima son las que recaen principalmente en el contexto de limitaciones de velocidad.
- Conos: elementos que las autoridades viales ubican sobre las carreteras para dar señales informativas a los conductores o para delimitar carriles cuando otras opciones no sean posibles. Particularmente en el entorno colombiano, las autoridades viales ubican estos elementos cuando realizan controles a lo largo de las vías, obligando así a los conductores a disminuir su velocidad.
Por último, pero no menos importante, están los hábitos sociales propios de la cultura colombiana al momento de conducir que pueden afectar un modelo de movilidad.
- Hablar mientras se conduce: aunque los conductores hablen con las personas al interior del vehículo, no es tan relevante como cuando un conductor contesta su teléfono celular, ya que distrae de lo que acontece alrededor suyo, lo que puede terminar en consecuencias nocivas tanto para él como para las demás personas en la vía. Lo ideal es que un conductor detenga su vehículo por completo y conteste el teléfono celular, aunque en el país esto poco se ve, dada la cultura de hablar mientras se maneja.
- Comprar cosas en intersecciones: similar a los vendedores ambulantes en semáforos e intersecciones, la acción de realizar transacciones comerciales en puntos donde dicho conductor puede generar embotellamientos y trancones afecta el modelo de movilidad que llevaban los vehículos antes de la acción.
- Parquear en lugares prohibidos: particularmente común en Colombia, la gente parquea sus vehículos en lugares prohibidos y esto puede llegar a generar embotellamientos o trancones.
- Conductores ebrios: aunque en el país sea una célebre pero triste estadística, dichos casos se presentan generalmente hacia altas horas de la noche, cuando el flujo de tráfico vehicular ha disminuido considerablemente. Es por esto que este tópico no es de tanta relevancia como los anteriores pero, en situaciones muy específicas, puede llegar a afectar la movilidad.
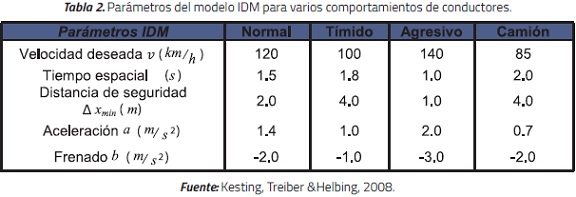
Después de un detallado análisis descrito por Orozco et al. [38] y tomando en cuenta las descripciones presentadas sobre las variables a tener en cuenta para la generación de modelos de movilidad, se decidió que el modelo de movilidad propuesto y adaptable a las características de los entornos viales colombianos estuviera basado en el Modelo de Conducción Inteligente (IDM, Intelligent Driving Model), que es un modelo determinístico en el que la aceleración de un vehículo depende de su velocidad, de los vehículos que lo rodean y del espacio que tiene con el vehículo precedente. El modelo también plantea la posibilidad de simular el comportamiento de distintos conductores (agresivos, normales y tímidos) y considera las diferencias entre conductores de vehículos particulares y camiones [39]. Este tipo de comportamiento se rige por la ecuación (1).

Con Gcomo distancia existente entre vehículos y los siguientes parámetros:
- Velocidad deseada (v): es la velocidad máxima que un conductor desea alcanzar en condiciones en las que la densidad de tráfico permita circular con rapidez.
- Tiempo especial (T): Hace referencia al tiempo requerido para que la distancia entre un nodo y otro sea considerable y segura. Dicha distancia surge de multiplicar la velocidad deseada vcon el tiempo especial.
- Aceleración deseada (a): la aceleración depende del tipo de conductor; entre más agresivo sea, mayor será su aceleración y viceversa.
- Distancia mínima entre parachoques (Δxmin): cuanto más agresivo es un conductor, menor es la distancia dejada entre parachoques; los conductores de camiones dejan, generalmente, más distancia.
- frenado confortable (b): describe la desaceleración de un vehículo al aproximarse a un obstáculo o cruce en la calzada. Los conductores agresivos requieren un frenado mayor debido a sus elevadas velocidades.
La Tabla 2 muestra un resumen de las características que influyen en el modelo de movilidad IDM para diversos tipos de conductores.
2.3. SIMULACIÓN DE REDES VANET
La simulación en redes vehiculares es una herramienta ventajosa para analizar y evaluar la viabilidad, los beneficios y las bondades de la implementación de las aplicaciones en los ITS. El grado de realismo y confiabilidad de los resultados de la simulación dependen fundamentalmente de dos aspectos: la integración de un simulador de red con un simulador de movilidad y el uso de métricas adecuadas para la evaluación de los resultados [40].
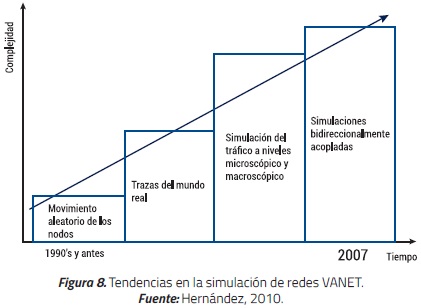
Las tendencias en simulación de redes VANET han evolucionado desde que este tópico empezó a tomar relevancia entre la comunidad científica y académica. En un principio se modeló únicamente el movimiento aleatorio de los nodos con ayuda de la teoría de tráfico, para pasar a tener en cuenta trazas reales, definir escenarios macroscópicos y microscópicos y llegar a la tendencia actual de simulaciones bidireccionalmente acopladas.
Las simulaciones bidireccionalmente acopladas hacen referencia a la comunicación en tiempo real entre el generador de movilidad y el simulador de red. Esto hace que la eficiencia de simulación aumente considerablemente. En la Figura 8 se observa dicha tendencia.
3. VÍAS FUTURAS
El proyecto de investigación que ha surgido dada la revisión de la literatura hecha permite identificar los pasos a seguir con el fin de desarrollar dos aplicaciones para redes vehiculares que se enfoquen en la eficiencia energética. Se ha definido una metodología a seguir con el fin de estructurar el trabajo futuro, empezando por la revisión sistemática presentada en este documento. La siguiente sección indica la metodología adaptada.
3.1. METODOLOGÍA
Para la propuesta, definición, implementación y validación del proyecto se divide el problema en fases o etapas, metodología que permite ir desarrollando y validando cada una de las actividades dentro de las fases de manera estructurada y lógica. Este enfoque modular trae como principal beneficio la capacidad de corregir errores o fallas que se presenten en cada uno de los módulos desarrollados de una manera más sencilla y efectiva. Por lo anterior se han definido las siguientes cuatro fases:
- Fase de Investigación.
- Revisión de estándares y estado del arte.
- Revisión de las arquitecturas de los Sistemas Inteligentes de Transporte Verdes.
- Fase de diseño e implementación.
- Diseño y caracterización de las aplicaciones.
- Tabla de requerimientos
- Lógica y funcionalidad de las aplicaciones
- Comunicación entre capas
- Definición de métricas de desempeño
- Programación de los módulos
- OMNET++ y VeINS.
- SUMO.
- Fase de pruebas y validación.
- Simulación de las aplicaciones.
- Recolección, análisis y evaluación de métricas.
- Fase de presentación y análisis de resultados.
- Análisis y presentación de los resultados en función de las métricas de desempeño y calidad definidas.
- Conclusiones basadas en las evidencias presentadas por los resultados.
- Recomendaciones para trabajos futuros de investigación.
3.1.1. Fase de Investigación
En esta fase se realiza un trabajo de investigación exhaustivo con el propósito de estudiar y comprender los estándares y el estado del arte de los Green ITS, para luego proceder al análisis de los modelos de movilidad con el fin de ajustar los criterios de uso a las características típicas de la ciudad de Cali, Colombia. Esta actividad se realiza mediante el apoyo de consultas de bases de datos internacionales, artículos científicos y documentos de diversos grupos de investigación y estandarización.
El resultado que se espera obtener en esta fase es el de adquirir las competencias y habilidades que permitan elaborar y contextualizar la solución del problema teniendo en cuenta el comportamiento de las redes vehiculares en escenarios colombianos.
3.1.2. Fase de diseño e implementación
La segunda fase comprende el diseño de la arquitectura software para las aplicaciones de eficiencia de tráfico en redes vehiculares. En primer lugar se analizan los requerimientos hardware y software, teniendo en cuenta las características de las aplicaciones vehiculares y, particularmente, en Colombia. Luego se analiza la infraestructura de la red vehicular para obtener los requerimientos específicos de las VANET utilizando los entornos de simulación OMNeT++ y VeINS. Al contar con los requerimientos y resultados de las simulaciones en mapas reales, se procederá a estructurar las aplicaciones vehiculares para eficiencia energética y movilidad sostenible, y se analizará su interoperabilidad con otras aplicaciones de seguridad vial y servicios comerciales y de información.
El resultado a obtener en esta fase consiste en definir, proponer e implementar la arquitectura software para el desarrollo de las aplicaciones de eficiencia energética y movilidad sostenible contextualizadas al entorno de tráfico vial en Colombia.
3.1.3 Fase de pruebas y validación
En esta fase se desarrollan las pruebas y validación de cada uno de los módulos que componen el sistema, para lo cual se plantea el siguiente plan de pruebas:
- Funcionamiento del modelo de la arquitectura SW adaptado al modelo de movilidad que caracterice el comportamiento del tráfico vehicular en Cali, Colombia.
- Pruebas funcionales que utilicen las aplicaciones en eficiencia vial y garanticen la fiabilidad de las mismas.
- Pruebas controladas por datos de movilidad de los automóviles.
- Ejecutar pruebas que permitan validar las prestaciones de la aplicación.
3.1.4. Fase de presentación y análisis de los resultados obtenidos con la aplicación
En esta fase se analizan los resultados obtenidos en las pruebas y se concluye sobre las ventajas de las arquitecturas propuestas. Se procede a escribir un documento con todos los detalles de la investigación, tanto procedimientos como resultados. Asimismo, se harán recomendaciones y se establecerán posibles campos de trabajo futuro.
3.1.5 Contribución a la línea de investigación en el grupo i2T de la Universidad Icesi(Cali, Colombia)
La propuesta y definición de arquitecturas de software para el desarrollo de aplicaciones de eficiencia energética y movilidad sostenible en redes vehiculares ad hoc permite a la comunidad científica contar con un modelo para el futuro diseño de aplicaciones en redes VANET. Adicionalmente se brindará un análisis de modelos de movilidad para el contexto colombiano permitiendo un mejor estudio del comportamiento de las redes vehiculares en escenarios locales. Este proyecto contribuirá a la adquisición y al avance de conocimiento científico en el área de las redes VANET.
4. CONCLUSIONES
Las aplicaciones de eficiencia de tráfico constituyen un importante enfoque de las redes vehiculares, ya que su objetivo principal se centra en hacer más eficientes los trayectos por las vías, mejorando así la sostenibilidad ambiental de las ciudades y afectando positivamente en la calidad de vida de los ciudadanos. Mediante la simulación de las redes VANET es posible definir parámetros necesarios para el desarrollo de este tipo de aplicaciones, siguiendo los lineamientos de los Green ITS, apuntando así a un uso más eficiente de recursos no renovables y a la disminución de cifras de GEI.
Los modelos de movilidad que gobiernan el movimiento de los nodos deben tener en cuenta diversas variables para que caractericen correctamente escenarios vehiculares. En particular, este documento presentó las variables a tener en cuenta para el entorno colombiano con el fin de lograr simulaciones más realistas en el siguiente paso de la investigación realizada.
AGRADECIMIENTOS
Este trabajo es financiado por el Departamento Administrativo de Ciencia, Tecnología e Innovación(Colciencias),entidadgubernamental Colombiana y su programa de Jóvenes Investigadores, y por el grupo de Investigación en Informática y Telecomunicaciones (i2T) de la Universidad Icesi.
REFERENCIAS BIBLIOGRÁFICAS
[1] United Nations Environment Programme (UNEP). (2012). Global Outlook on Sustainable Consumption and Production Policies: Taking Action Together. Paris, Francia: UNEP. [ Links ]
[2] United Nations. (1992). United Nations Framework Convention on Climate Change. [ Links ]
[3] Departamento Nacional de Planeación. (2011). Plan Nacional de Desarrollo 2010-2014. Recuperado en enero de 2014, de: http://www.dnp.gov.co/LinkClick.aspx?fileticket=_8KOB4G8yNA%3d&tab id=1238. [ Links ]
[4] Facultad de Ingeniería, Universidad de los Andes. (2008). Proyecciones de Emisiones de Gases de Efecto Invernadero y Posibilidades de Mitigación en Colombia. CEPAL [Documento PDF]. Recuperado el 6 de octubre de 2014, de http://www.cepal.org/dmaah/noticias/ noticias/6/34276/cc10_universidad_ andes_colombia_estudio.pdf. [ Links ]
[5] Tsugawa, S. (2010). Energy ITS Program. IEEE Forum on Integrated and Sustainable Transportation Systems (FISTS) and ITS Energy Symposium. IEEE: Japón. [ Links ]
[6] Tsugawa, S. & Kato, S. (2010). Energy ITS: Another Application of Vehicular Communications. IEEE Communications Magazine, 48 (11), pp. 120-126. [ Links ]
[7] Kelly, T. & Adolph, M. (2008). ITU-T Initiatives on Climate Change. IEEE Communications Magazine, 46 (10), pp. 108-114. [ Links ]
[8] Mahajan, A. et al. (2005). Evaluation of Mobility Models for Vehicular Ad-hoc Network Simulations. Reporte Técnico N.051220.Florida State University: Tallahassee. [ Links ]
[9] Karagiannis, G. et al. (2011). Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions. IEEE Communications Surveys & Tutorials, 13 (4), pp. 584-616. [ Links ]
[10] Baldessari, R. et al. (2006). Flexible Connectivity Management in Vehicular Communication Networks. Proceedings of International Workshop on Intelligent Transportation. Alemania. [ Links ]
[11] Wu, H. (2005). Analysis and Design of Vehicular Networks. (Tesis de doctorado inédita). College of Computing, Georgia Institute of Technology, Atlanta, EE.UU, p.159. [ Links ]
[12] Gerla, M. & Kleinrock, L. (2011). Vehicular Networks and the Future of Mobile Internet. ScienceDirect Computer Networks, 55(2), pp. 457-469. [ Links ]
[13] Moustafa, H. & Zhang, Y., (2009). Vehicular Networks: Techniques, Standards and Applications. Boston, EE.UU: Auerbach Publications, p. 445. [ Links ]
[14] Martínez, F. et al. (2011). A Survey and Comparative Study of Simulators for Vehicular ad hoc Networks (VANETs). Wiley Wireless Communications and Mobile Computing, 11(7), pp. 813-828. [ Links ]
[15] Pachón, A., Nieto, C. & Velasco, M. (2010). Modelos de Comportamiento de las Redes Vehiculares en sus Escenarios más Representativos, utilizando simulación en la herramienta NCTUns. Sistemas y Telemática: Revista de la Facultad de Ingeniería, Universidad ICESI, 8(15), pp. 13-25. [ Links ]
[16] Boukerche, A. (2009). Algorithms and Protocols for Wireless and Mobile Ad Hoc Networks. New Jersey, EE.UU: John Wiley & Sons, p. 500. [ Links ]
[17] Hartenstein, H. & Laberteaux, K. (2008). A Tutorial Survey on Vehicular ad hoc Networks. IEEE Communications Magazine, 46(6), pp. 164-171. [ Links ]
[18] Jian, D. & Delgrossi, L. (2008). IEEE 802.11p: Towards an International Standard for Wireless Access in Vehicular Environments. IEEE Vehicular Technology Conference (VTC Fall). IEEE: Calgary, Canadá [ Links ].
[19] Emmelmann, M., Bochow, B. & Kellum, C. (2010). Vehicular Networking: Automotive Applications and Beyond. Chichester, Reino Unido: John Wiley & Sons, p. 314. [ Links ]
[20] IEEE. (2010). IEEE 802.11p, Amendment to Standard for Information Technology Telecommunications and Information Exchange Between Systems- Local and Metropolitan Area Networks-Specific requirements, Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications-Amendment 7: Wireless Access. Vehicular Environment, IEEE Std. IEEE 802.11p. [ Links ]
[21] IEEE. (2013). IEEE P1609.0, Draft Standard for Wireless Access in Vehicular Environments (WAVE) Architecture, IEEE Std. IEEE 1609.0. [ Links ]
[22] IEEE. (2006). IEEE 1609.4, Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) Multi-Channel Operation, IEEE Std. IEEE 1609.4. [ Links ]
[23] IEEE. (2007). IEEE 1609.3, IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE)-Networking Services, IEEE Std. IEEE 1609.3. [ Links ]
[24] IEEE. (2006). IEEE 1609.2, Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) Security Services for Applications and Management Messages, IEEE Std. IEEE 1609.2. [ Links ]
[25] IEEE. (1998). IEEE 802.2-1998, IEEE Standard for Information technology- Telecommunications and information exchange between systems-Local and metropolitan area networks-Specific requirements-Part 2: Logical Link Control. [ Links ]
[26] Sjöberg, K. (2013). Medium access control for vehicular ad hoc networks. (Tesis de doctorado inédita). Chalmers University of Technology, Göteborg, Suecia, p.127. [ Links ]
[27] Kosch, T. et al. (2009). Communication Architecture for Cooperative Systems in Europe. IEEE Communications Magazine, 47(5), pp.116-125. [ Links ]
[28] Dar, K. et al. (2010). Wireless Communication Technologies for ITS Applications. Topics in Automotive Networking. IEEE Communications Magazine, 48(5), pp.156-162. [ Links ]
[29] Papadimitratos, P. et al. (2009). Vehicular Communication Systems: Enabling Technologies, Applications and Future Outlook on Intelligent Transportation. IEEE Communications Magazine, 47(11), pp.84-95. [ Links ]
[30] Härri, J. et al. (2011). Vehicular Mobility Simulation with VanetMobiSim. SAGE Transactions of the Society for Modeling and Simulation International, 87(4), pp.275-300. [ Links ]
[31] Hartenstein, H. & Laberteaux, K. (2010). VANET: Vehicular Applications and Internetworking Technologies. Torquay, Reino Unido: John Wiley & Sons, p.466. [ Links ]
[32] Gainaru, A., Dobre, C. & Cristea, V. (2009). A Realistic Mobility Model Based on Social Networks for the Simulation of VANETs. 69th Vehicular Technology Conference. Barcelona, España. [ Links ]
[33] Camp, T., Boleng, J. & Davies, V. (2002). A Survey of Mobility Models for ad hoc Network Research. Wireless Communications & Mobile Computing, 2(5), pp.483-502. [ Links ]
[34] Cruz, J. (2009). Estudio y Simulación de una Red ad hoc Vehicular VANET. (Tesis de pregrado inédita). Facultad de Ingeniería Electrónica, Escuela Politécnica del Ejército, Quito, Ecuador, p.156. [ Links ]
[35] Pardo, A. (2011). C4R: Generación de Modelos de Movilidad para Redes de Vehículos a partir de Mapas Reales (Tesis de pregrado inédita). Departamento de Informática e Ingeniería de Sistemas, Escuela Universitaria Politécnica de Teruel, Zaragoza, España, p.91. [ Links ]
[36] Härri, J., Filali, F. & Bonnet, C. (2009). Mobility Models for Vehicular ad hoc Networks: A Survey and Taxonomy. IEEE Communications Surveys & Tutorials, 11 (4), pp.19-41. [ Links ]
[37] Leiva, R. (2007). Simulación de VANETs (Vehicular Ad Hoc Networks) (Tesis de pregrado inédita). Departament d'Enginyeria Telemàtica, Universitat Politècnica de Catalunya, Barcelona, España, p.75. [ Links ]
[38] Orozco, O., Chavarro, D. & Calderón, O. (2013). Impacto de la Velocidad y Modelo de Movilidad en una Comunicación de Datos de una Red Vehicular (Tesis de pregrado inédita). Facultad de Ingeniería Electrónica y Telecomunicaciones, Universidad del Cauca, Popayán, Colombia, p. 93. [ Links ]
[39] Kesting, A., Treiber, M. & Helbing, D., (2008). Agents for Traffic Simulation. En Multi-Agent Systems: Simulation and Applications. Boca Raton, Florida, EE.UU: Taylor & Francis Group, p.566. [ Links ]
[40] Dressler, F. et al. (2011). Towards Realistic Simulations of Inter-Vehicle Communications: Models, Techniques and Pitfalls. IEEE Vehicular Technology Magazine, 6(3), pp.43-51. [ Links ]
