











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
PermalinkIntroducción
El desarrollo de tecnología para promover el aprendizaje requiere la exploración de áreas como filosofía, ciencias cognitivas y pedagogía, el proceso de síntesis propuesto desde las ciencias de lo artificial [1] resalta la participación de diversas áreas en el diseño de sistemas artificiales. Desde la ingeniería, el resultado de diseño no son solo los artefactos, también son los procesos cognitivos, es decir, la tecnología configura el pensamiento y, en el ámbito educativo, esta condición es de primer orden.
Las máquinas hacen parte del mundo artificial; en el ámbito cognitivo, estas se sitúan, bien sea como artefactos de la mente para comprender el mundo o se integran al mundo. Así, la relación hombre, máquina, mundo propuesto en [2] puede ser ampliada cuando las máquinas adquieren la característica de agencia, dicho de otro modo, las máquinas hacen parte del andamiaje en la construcción de conceptos y modelos, ambos aspectos son reconocidos en las teorías sociocognitivas del aprendizaje. Si hacen parte del entorno, entonces determinan las formas de razonamiento, lo que algunos autores reconocen como racionalidad tecnológica [1]. En este sentido, las máquinas se integran como herramientas de mediación, algunas veces de manera intencionada y otras no.
En ambas situaciones el encuentro con la tecnología genera nuevos deseos, cambia el sentido de la corporalidad y facilita nuevas formas de experimentar el mundo [3]. De manera particular, en educación, el encuentro con la tecnología ha sido estudiado desde las teorías constructivistas y construccionistas; en la integración se resaltan dos centros de interés: la reconfiguración de la teoría de la actividad propuesta en el enfoque sociocognitivo de la educación y los efectos cognitivos y emocionales de los aprendices, como resultado de la convergencia cognitiva y emocional con herramientas que actúan de manera deliberativa para orientar el aprendizaje.
En la teoría de la actividad propuesta en el enfoque sociocognitivo, las herramientas son consideradas instrumentos de mediación entre el sujeto y el mundo; los avances en ingeniería vistos a través del desarrollo de máquinas con rasgos de inteligencia cognitiva y emocional requieren que las acciones de mediación (cognitivas y emocionales) realizadas por las herramientas sean abordadas desde la fenomenología. En otras palabras, la mediación entre sujeto y herramienta ahora es reconocida como mediación entre agentes; unos naturales, otros artificiales. En las nuevas condiciones de mediación, las relaciones fenomeno-lógicas adquieren mayor complejidad por varias razones: los procesos de retroalimentación son adaptativos, la máquina se integra a la sociedad de agentes que regulan el comportamiento humano, cumple el rol de activador cognitivo y, al estar situada en el mundo, promueve nuevas acciones de pensamiento provocadas por su corporeidad.
La presencia social de la máquina estimula aspectos como: negociar el espacio físico durante la mediación, pensar de manera colectiva y asumir e intercambiar roles, etc.; en términos propuestos por Edmund Husserl, hay una mayor empatía que se nutre durante la convergencia de actividades cognitivas entre los sujetos y la máquina [4, 5].
Los efectos cognitivos y emocionales están vinculados con el reconocimiento de las máquinas como sistemas inteligentes; en particular, cuando el control de la máquina depende de ella misma y no de sujetos humanos. El reconocimiento de emociones involucra dimensiones simbólicas, culturales y disposición entre agentes [6]. En educación, el efecto de las emociones de las máquinas sigue relacionado con entenderlas como un mecanismo de retroalimentación durante el proceso de mediación. Así, la mediación, elemento vinculante entre hombre y máquina, subraya la relación recíproca durante el proceso de comunicación soportado en aspectos como: apariencia física de ambos agentes (sujeto, máquina), transmisión y reconocimiento de emociones, relación entre tarea y limitaciones mecánicas, cognitivas y emocionales y, comprensión compartida del espacio del problema [7]. Por ejemplo, en el uso de robots, los aspectos físicos son más evidentes en tareas que requieren compartir un espacio, ya sea durante el desarrollo de una tarea colaborativa o individual que requiere del reconocimiento del otro. Los efectos cognitivos y emocionales también varían de acuerdo con el estado cognitivo de los sujetos; los niños hasta la edad aproximada de ocho años presentan conductas relacionadas con el animismo para explicar el comportamiento de las máquinas, el cual, según [8], se encuentran entre los límites de lo físico y lo psicológico. Las atribuciones de vida están asociadas al movimiento, la similitud con seres vivos humanos y no humanos, la interactividad, las conductas que reflejan intenciones, sentimientos y autonomía [9].
De otra parte, la cognición es un proceso no solo mental, sino corporal enfocado a solucionar problemas. Esto implica que el aprendizaje involucra todo el cuerpo, que interactúa con herramientas que involucran las categorías de máquinas o agentes inteligentes durante el proceso de mediación educativa, cuyo objetivo es el aprendizaje. Algunos autores presentan la perspectiva dualista mente-cerebro sobre la cual se ubican actualmente las ciencias cognitivas [10]. El uso de herramientas promueve en los sujetos formas de pensamiento en función de sus capacidades cognitivas [11]. Es decir, las herramientas como artefactos mediadores que contribuyen en los procesos cognitivos dada su significación conceptual y material [12]. La significación es la diferencia entre concepto y propiedades. Por ejemplo, la palabra robot y el robot real. La palabra robot evoca propiedades y funciones que representan espacios de posibilidad; de otra parte, el robot real evoca una estructura física [13]. La riqueza conceptual, aprovechable en términos formativos, está en la primera significación que induce al sujeto a usar el artefacto de una manera que reúne largos años de experiencia cognitiva con el artefacto como creaciones de la mente y la mano [14]. El sujeto se apropia del artefacto no solo en función de sus capacidades cognitivas, sino de las capacidades que evocan el artefacto o son insinuadas en su diseño.
La relación hombre-máquina incide en la forma de comprender el mundo y de resolver los problemas. Como resultado del proceso innato del hombre de imaginar mundos y alternativas posibles, se ha establecido el mundo artificial sobre el cual se ha desarrollado una racionalidad que hace que se piense desde posibilidades naturales y artificiales. Dentro de las artificiales, la técnica ha permitido el desarrollo de herramientas y máquinas con diferentes grados de manejo, en donde los autómatas son la última herencia [15]. El desarrollo de estos sistemas tecnológicos refleja cómo la técnica se usa como artefacto de comprensión de la naturaleza o como una herramienta para permanecer en el mundo.
Durante el proceso de solución de problemas hay una interacción entre: i) ambiente de la tarea, ii) características de la máquina y iii) estrategias de solución del problema. La interacción de estos tres aspectos está relacionada con el proceso cognitivo de simulación. La simulación es considerada uno de los principios de funcionamiento cerebral, que es útil para comprender, diseñar, entrenar, entretener, modelar, predecir, tomar decisiones y en general, solucionar problemas. Dentro de sus ventajas están: la independencia de relaciones espaciales, el control de la analogía de la variable tiempo, el diseño y prueba de modelos no reproducibles en ambientes naturales [16]. La elaboración de modelos tiene dos perspectivas: inteligencia artificial y ciencia cognitiva. La primera los considera como estructuras de conocimiento en dominios específicos o como estructuras de memoria a largo plazo. La segunda, los define como un tipo de representaciones mentales, isomorfas y análogas al mundo, icónicas, con la posibilidad de tener símbolos abstractos, soportadas en el razonamiento lógico, compuestas por estructuras, propiedades y relaciones.
El primer elemento, el ambiente de la tarea, determina las posibles estructuras del espacio del problema, entendido como el conjunto de todos los estados posibles de operación y que están en función de las diferentes alternativas de representación. El segundo elemento, las características de máquinas, aborda aspectos como: modelos cognitivos artificiales, modelos emocionales artificiales y capacidades físicas, virtuales o ubicuas. El tercer elemento, las estrategias de solución de problemas, está dividido en dos partes: algorítmicas y heurísticas. En las primeras se hace un recorrido de todo el espacio del problema y en las segundas hay atajos o búsquedas selectivas, las más comunes son: búsqueda aleatoria, ensayo y error, búsqueda en profundidad y amplitud, subir la cuesta, análisis de medios y fines, búsqueda hacia atrás, analogías y división del problema en sub-problemas o sub-metas [17, 18]. En los tres elementos mencionados hay avances significativos desde la inteligencia artificial. A través de la robótica, la ingeniería está contribuyendo en el desarrollo de herramientas cognitivas, sociales y emocionales en educación [19, 22].
En conclusión, las consecuencias fenomeno-lógicas de la interacción entre herramientas y estudiantes consideran aspectos como: pensar en hacer cosas juntos, dependencia social y mente social. El lenguaje, verbal o no-verbal incide en el grado de interacción, en tanto es considerado como una herramienta para desarrollar la mediación; de acuerdo con la sintaxis y semántica del lenguaje, la situación de aprendizaje es modelada. Adicionalmente, las herramientas soportan la actividad cognitiva en tanto permiten representar y manipular conceptos durante la construcción del conocimiento, reconocer diferentes niveles de representación del problema en función de distintas herramientas, desarrollar procesos de imaginación vinculados con evolución de modelos mentales con relación a la forma de uso y el proceso de solución del problema y, finalmente, evocar esquemas de uso teniendo en cuenta la morfología de las herramientas.
Metodología
Pregunta de investigación
Como se ha mencionado, las herramientas afectan los procesos cognitivos. El uso de las herramientas durante el aprendizaje puede ser intencionado o no intencionado. Además, las intenciones de uso de herramientas pueden ser generaras por sujetos humanos o por la misma herramienta con agentividad. Cuando la herramienta es quien decide las condiciones de intervención; entonces la disposición emocional y cognitiva de los sujetos es diversa. En este orden de ideas surge la siguiente pregunta: ¿qué aspectos fenomenológicos y cognitivos emergen durante la interacción de un sujeto y un robot antropomórfico con agentividad durante el desarrollo de habilidades de solución de problemas estructurados?
Hipótesis
Según a la revisión de literatura, la interacción entre humanos y máquinas supone diversas configuraciones de modelos mentales en concordancia a la posición en la que la máquina es asumida por el sujeto. Basado en el trabajo teórico y empírico presentado en la introducción del documento, hay tres opciones de posicionamiento: (hombre-máquina) → mundo, hombre → (máquina-mundo. Así, las hipótesis son:
H0: el robot logra integrarse a la evolución de esquemas cognitivos del sujeto durante la solución de problemas estructurados matemáticos.
H1: el robot no logra integrarse a la evolución de esquemas cognitivos del sujeto durante la solución de problemas estructurados matemáticos y simplemente el robot es asumido como un mecanismo antropomórfico de retroalimentación.
Diseño de la Investigación
La propuesta del diseño de la investigación se conforma en las tradiciones de investigación en el campo de solución de problemas, robótica y HRI [21, 22], Así, el enfoque es mixto, el diseño cuasiex-perimental y el alcance exploratorio. Estas características reconocen los tres campos para explicar y comprender el fenómeno de interacción entre sujetos y herramientas con agentividad. De los tres campos, la solución de problemas tiene mayor tradición en investigación; la robótica por su parte tiene una tendencia positivista en función de validar los sistemas electromecánicos y de control. Finalmente, el campo de HRI, es un campo en una fase temprana de desarrollo, en donde las propuestas de investigación aún se están estructurando. La mayoría de literatura consultada que da cuenta de procesos de validación de interacción entre humanos y robots consideran aspectos como: instrumentos utilizados para la recolección de datos, cantidad de sujetos en el proceso de validación, ubicación del lugar de los experimentos (escuela o laboratorio) y tiempo de interacción. El diseño propuesto integra una técnica no muy utilizada en esta área; los protocolos verbales.
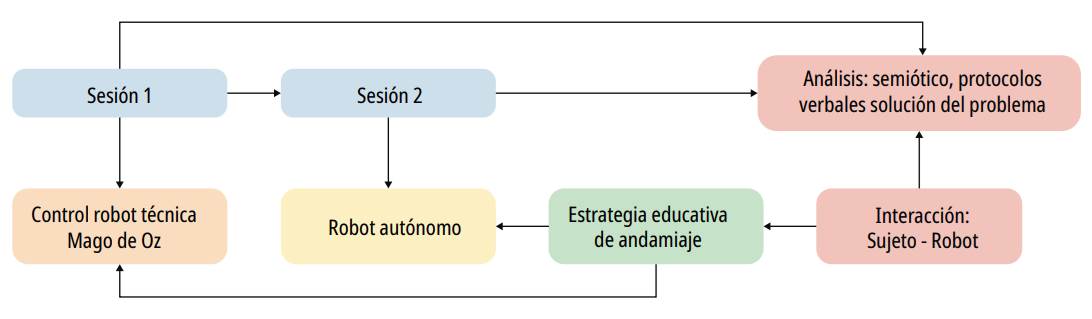
Así, la experiencia de interacción entre niños y robots durante el desarrollo de habilidades de solución de problemas considera dos escenarios (Ver figura 1). Primero, interacción con un robot antropomórfico controlado mediante la técnica de Mago de Oz. Esto implica que el robot es controlado a distancia por un operador humano. Segundo, interacción con el mismo robot, pero automático; el modelo de razonamiento está fundamentado en la teoría psicológica de razonamiento práctico bdi (Beliefs, Desires, Intentions); en este escenario no hay intervención de un operador humano. En ambos escenarios las acciones educativas del robot están inspiradas en la estrategia de andamiaje propuesta por Jerome Brunner [23]. La estrategia identifica oportunidades de intervención mediante acciones como: mantener la dirección en la tarea, controlar la frustración, resaltar las condiciones críticas y modificar la complejidad de la tarea de aprendizaje. La interacción es promovida mediante la solución del juego matemático “La Escalera”. Este juego es ampliamente reconocido en educación matemática para el análisis de las trayectorias de aprendizaje, trayectorias hipotéticas de aprendizaje y evolución de esquemas cognitivos.
Durante la solución son recolectados datos cualitativos asociados al lenguaje verbal y no verbal de los sujetos y datos cuantitativos asociados a la trayectoria de solución del juego y también al comportamiento del sujeto.
Participantes
En esta experiencia participaron 23 estudiantes entre 10 y 13 años de tres colegios: Colegio Distrital Unión Europea, Colegio Privado de La Enseñanza y Gimnasio Los Robles; todos ubicados en la ciudad de Bogotá, Colombia. En el primer escenario participaron 8 estudiantes. En el segundo escenario participaron 15 estudiantes. En virtud del alcance de la investigación, no fue considerado el género de los sujetos ni el conocimiento previo relacionado con la categoría de solución de juegos matemáticos.
Materiales
El robot
La plataforma utilizada para el estudio fue Baxter, un robot industrial antropomórfico, que está compuesto por dos brazos y una pantalla LCD. Mediante el sistema operativo ros cada uno de sus actuadores es controlado. Las variables del sistema de control, accesibles mediante nodos tipo ROS, incluyen velocidad, aceleración, posición y orientación (ver figura 2).
Las aplicaciones de software
Dos aplicaciones fueron desarrolladas. La primera es una aplicación en lenguaje HTML para el control del robot mediante la técnica de Mago de Oz. Así, para controlar el robot a distancia se integraron ROS y HTML mediante un WebSocket. La segunda es una aplicación en lenguaje java para el control autónomo del robot. La autonomía del robot se logró mediante el diseño de una arquitectura cognitiva artificial basada en un sistema multi-agentes; para la implementación se utilizó el software BDI-BESA. En ambas aplicaciones el robot realiza las siguientes acciones: hace preguntas, expresa emociones, brinda soporte emocional mediante frases motivadoras, aumenta o disminuye la dificultad del juego y presenta señales de vida como respirar, suspirar, mover el rostro (pantalla) y mover los brazos.
El juego
El medio para promover la interacción es el juego La Escalera. Es un juego ampliamente utilizado en educación matemática debido a su alto nivel de deserción y a las oportunidades que ofrece para el estudio cognitivo [24, 25]. El juego está compuesto por dos grupos de fichas las cuales están ordenadas horizontalmente. El objetivo del juego es intercambiar la posición de los dos grupos de fichas. Para lograr el estado meta, el juego tiene dos reglas: primera, una ficha no puede saltar sobre otra ficha del mismo grupo; segunda, una ficha solo se puede moverse al espacio vacío adyacente. Una versión virtual del juego, desarrollada en el contexto de la línea de investigación y está disponible en http://escalera.juegosmatematicos.online/fr.
Procedimiento
Para las dos sesiones de trabajo, los tres grupos de estudiantes fueron invitados al laboratorio; cada sesión comenzó con la grabación en video y audio de cada participante. Posteriormente, se hizo una explicación y una demostración de las posibilidades del robot Baxter durante el proceso de solución de problema; luego, cada sujeto quedó aislado con el robot y el investigador durante el proceso de solución del problema.
El tiempo de interacción con el robot variaba, dependiendo las características cognitivas de cada sujeto. Cabe aclarar que antes de la participación, fue firmado un formato de consentimiento informado por los padres o responsables de los estudiantes.
Diseño del comportamiento del robot
De acuerdo con la introducción, el robot es una herramienta de mediación con agentividad; en las dos condiciones de control presentadas (control mediante la técnica de Mago de Oz, control automático) el comportamiento del robot se refleja mediante cinco grupos de acciones. En la figura 3, se presenta la articulación entre las acciones y los modelos de creencias, sensorial, deseos e intenciones y de acción. El módulo sensorial corresponde al reconocimiento del movimiento de las fichas del juego y a las expresiones faciales y corporales del sujeto.
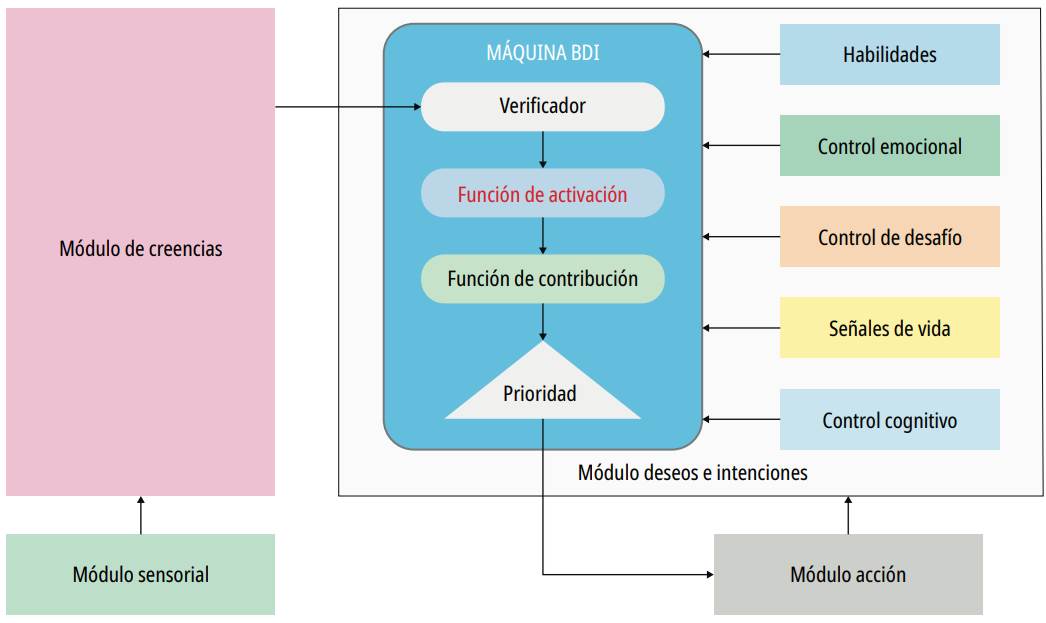
El módulo de creencias evalúa el conocimiento operativo del sujeto para resolver el juego, las habilidades para resolver el juego y el estado emocional del sujeto entre ansiedad, fluir y aburrimiento. El módulo de deseos e intenciones diseñado con base en la teoría de andamiaje está representado por los cinco grupos de acciones, en los cuales está inspirada la teoría psicológica del fluir.
Métricas y análisis
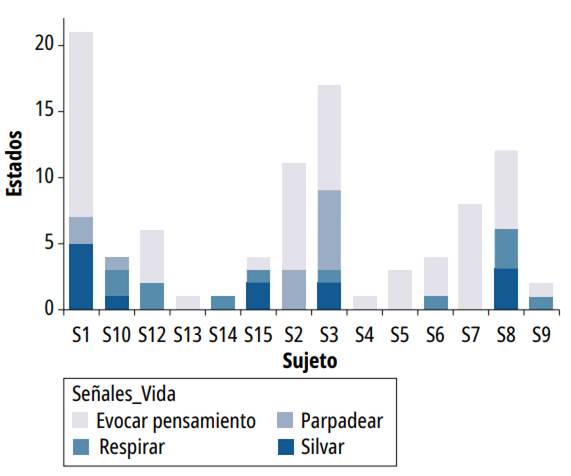
Las métricas propuestas son la atención del sujeto durante la solución del juego, señales de vida del robot, acciones del robot para ayudar al estudiante, trayectorias de solución del juego. La atención del sujeto está dividida entre loa estímulos externos, el investigador, los movimientos del robot, la pantalla del robot y el tablero del problema. Las señales de vida del robot están divididas en evocar pensamiento, parpadear, respirar y silbar. Las acciones del robot están divididas en movimiento del robot para cambiar el estado del juego, ayuda del robot mediante voz, reiniciar el juego, acciones del sujeto.
De acuerdo con el alcance del documento propuesto, el análisis de las variables se hace con referente a los principios de estadística descriptiva.
Resultados
El análisis propuesto reconoce el valor de cuatro variables: señales de vida, atención del sujeto a las intervenciones del robot, acciones del robot, y trayectoria del sujeto durante la solución del juego.
Las señales de vida son un concepto propuesto en este documento para promover el reconocimiento de la herramienta como un agente y no como una máquina. Acciones del robot para evocar pensamiento promueven en el sujeto el reconocimiento del robot como un acompañante durante el proceso de solución del juego. Mediante frases emitidas por el robot como: “¡Ajá”, “hmmm…!”, “¡Ah...!” y “Respirar”; se refuerza el concepto de agentividad y presencia social del robot en el ambiente de aprendizaje.
De acuerdo con los datos presentados en la figura 4, la señal llamada “Evocar Pensamiento” es la más común. Durante la interacción, el sujeto transita por dos escenarios: efecto novedad y luego, interés por solucionar el problema o juego propuesto. El segundo escenario considera dos aspectos: primero, la activación de las señales de vida está en función de la trayectoria de solución del problema del sujeto y las emociones presentadas; segundo, las señales de vida son reconocidas o ignoradas, conforme a el nivel de concentración que se evidencia en el sujeto. Aunque el reconocimiento de las señales es útil para acentuar el reconocimiento de la herramienta como agente, también causa distracción durante la solución del problema y es reconocida, de manera equivocada, por los sujetos como instrumento de retroalimentación acerca de la solución. De manera análoga a los recursos humanos para interactuar, el robot está dotado con sonidos, movimientos, palabras y una pantalla que representa el rostro del robot. Aunque el rostro es considerado el punto de confluencia emocional e instrumento semiótico para complementar el lenguaje verbal y no verbal, lo que se evidencia en la mayoría de los sujetos es la tendencia a ignorar la pantalla del robot en tanto el foco de atención está en el tablero del juego. Entonces, cambiar el punto de atención del tablero de juego a la pantalla del robot u otra dirección implica abandonar la representación mental del juego, la cual es utilizada en la construcción de secuencias de movimientos para resolverlo.
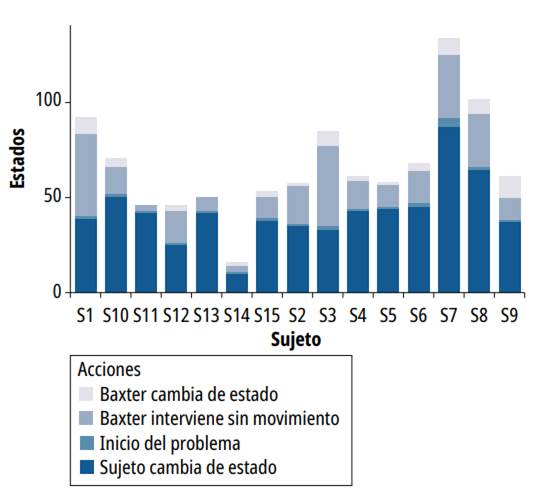
Las acciones hacen parte del concepto de agentividad de las herramientas. Una de las condiciones de las acciones es el asertividad; es decir, interviene siguiendo las necesidades cognitivas y emocionales de los sujetos. De acuerdo con las condiciones del ambiente educativo y las capacidades técnicas de las herramientas, las acciones involucran intervención física, verbal y no verbal. El robot Baxter tiene capacidad para intervenir físicamente mediante la manipulación de objetos geométricos simples.
Para ayudarle a los sujetos a resolver el problema, el robot interviene mediante dos grupos de acciones: mover las fichas del juego e intervenir sin movimiento. Sin embargo, el análisis también considera las acciones de reinicio del juego y el sujeto cambia de estado.
A pesar del interés dominante de ver en acción al robot, hay una mayor intervención de los sujetos durante la solución del problema (Figura 5). Al comparar las acciones del robot entre las acciones que intervienen con movimiento y sin movimiento de fichas, son menores las acciones del robot con movimiento.
La diversidad de recursos de las herramientas como agentes cognitivos, emocionales y sociales son útiles si se presentan en función de contribuir a la comprensión de la estructura del problema o a la solución de este. Cuando las señales de vida de la herramienta con agentividad son presentadas con el interés de evocar vida, causa la distracción del sujeto durante la solución del problema.
Los sujetos asumen a los robots como observadores constantes de sus acciones. Es evidente el interés de los sujetos por liderar la solución del problema. En la experiencia desarrollada, las acciones de movimiento del robot surgen, según la teoría de andamiaje, en momentos críticos reflejados por los sujetos mediante errores o largas pausas de movimiento que indican confusión o desconocimiento acerca de la estrategia de solución. Un dato interesante, es la reacción de los sujetos cuando, mientras el robot está en movimiento, los sujetos comprenden el paso a seguir en la solución del problema; entonces los sujetos presentan episodios de ansiedad o aburrimiento mientras el robot termina la rutina de movimiento. Las rutinas de movimiento del robot también son útiles en tanto permiten pausas de pensamiento en los sujetos y también son una oportunidad para observar como el robot, considerado como el experto, contribuye en la solución del problema.
De otra parte, las intervenciones del robot sin movimiento; es decir, mediante frases vinculadas al control cognitivo, metacognitivo y conocimiento operativo del problema, son asumidas por los sujetos como mecanismos de retroalimentación para mantener el control del juego.
La atención es un indicador propuesto para el análisis de la experiencia. Los focos de atención del escenario considerados son: tablero del juego, pantalla del robot, movimientos del robot, investigador y estímulos externos.
Durante la interacción, el foco de atención dominante es el tablero del problema. Una de las razones es la exigencia cognitiva que implica la representación mental del problema. Aunque la agencia de la herramienta de aprendizaje (robot) se materializa mediante señales de vida, intervenciones sin movimiento e intervenciones con movimiento; los sujetos tienen a no desviar la atención al tablero debido al riesgo que representa perder la secuencia de representaciones de estados (Ver figura 6).
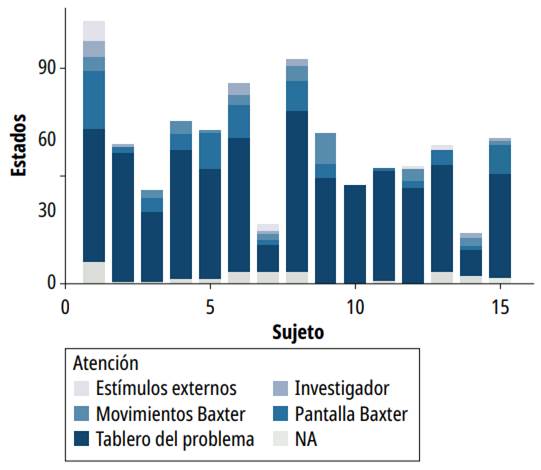
En el caso del robot dotado de pantalla, parlantes y brazos; observar la pantalla y escuchar las frases del robot no representa largos tiempos de desviación de la mirada hacia el tablero del problema. Sin embargo, los movimientos de los brazos del robot exigen pausas mayores de atención de los sujetos.
Esta condición de atención escalonada contribuye en la comprensión y apropiación de las posibilidades que la herramienta tiene para contribuir en solución del problema.
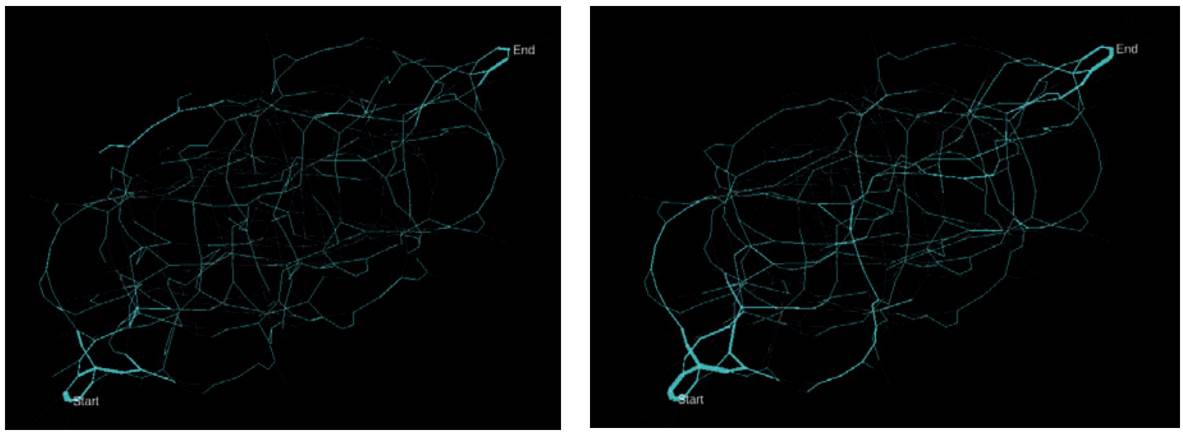
La figura 7 es una representación del espacio del problema; es decir, todos los estados posibles del juego. El espacio del problema está compuesto por Nodos y Aristas. Los Nodos indican cada una de las combinaciones de las fichas del juego y las Aristas indican la relación entre Nodos. De otra parte, las líneas de color azul representan las trayectorias realizadas por los sujetos y el ancho de cada línea indica la frecuencia de visita en cada arista. Al comparar ambas figuras, es evidente que el proceso de solución del problema acompañado de la herramienta con agentividad tiene un impacto positivo en la exploración del espacio del problema y de la correspondiente solución.
Conclusiones
La integración de herramientas con agentividad es un fenómeno reciente en educación. Si bien hay un amplio discurso acerca del beneficio de estas herramientas en el desarrollo de procesos cognitivos, las herramientas con agentividad son un campo de reciente exploración. La interacción entre humanos y robots, en donde el comportamiento de las herramientas está soportado en propuestas pedagógicas y didácticas, también requiere una exploración acerca de cómo los sujetos apropian las herramientas y cómo la diferencia entre las expectativas y las posibilidades reales de comportamiento de los robots afectan la integración de estos en procesos cognitivos y emocionales durante el aprendizaje.
Limitaciones y trabajo futuro
La experiencia presentada fue realizada con un robot antropomórfico con cualidades de robot social; la población de sujetos que participó aún está en una etapa infantil, en donde el animismo propuesto en Piaget [27] hace parte de la apropiación de las herramientas con agentividad. Adicionalmente, el tiempo de interacción por sujeto no superó los sesenta minutos lo cual limita la creación de lazos emocionales con la herramienta. En trabajos futuros se espera implementar otros robots antropomórficos como Pepper y Nao.

