











 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares em
SciELO
Similares em
SciELO  Similares em Google
Similares em Google 
 Permalink
Permalink
Introducción
Cerca de Schiltach, en el estado de Baden - Württemberg, una pequeña ciudad de la Selva Negra al suroeste de Alemania, hay una antigua mina de extracción de plata donde, a 150 metros bajo tierra, se encuentran instalados algunos de los sismógrafos más sensibles de Alemania. Si alguien piensa que puede tener acceso a estas maravillas mecánicas, que cuentan con docenas de palancas, engranajes, rodillos y resortes, se llevaría una decepción (Wielandt, 1996). En primer lugar, no están permitidas las visitas; de hecho, los miembros del personal científico-técnico ingresan a las instalaciones donde se encuentran los sismómetros solo si es absolutamente indispensable, situación que, afortunadamente, se presenta rara vez. En segundo lugar, incluso si se permitiera la visita a las instalaciones, no habría mucho que ver más que unas cuantas cajas de espuma de poliestireno recubiertas con un material aislante de color plateado brillante, que sirven para proteger los equipos de las fluctuaciones de la temperatura. Y en tercer lugar, si un sismógrafo estuviera exhibido, solo se vería un pequeño cilindro metálico ubicado sobre una pequeña base de hormigón, en cuyo interior, protegido por un recubrimiento de múltiples capas, se oculta el sensor como tal: un bloque de latón de unos cientos de gramos conocido como masa sísmica. Esta puede moverse libremente en una dirección determinada y, en principio, su única función es permanecer inmóvil (por inercia) cuando la Tierra se mueve a su alrededor. La posición de la masa sísmica se determina electrónicamente, por lo cual un sismógrafo moderno requiere de un alto nivel de ingeniería de precisión (Wielandt, 2012; Wielandt, 1996).
Por ello en este artículo se quiso ofrecer la posibilidad de acercarse a estos instrumentos que parecen inaccesibles. Pero antes de echar un vistazo más de cerca a algunos sismógrafos antiguos y modernos, debe comprenderse su funcionamiento básico y aclarar los requerimientos técnicos de los elementos claves de su diseño. Cabe aclarar que aquí nos referiremos, principalmente, a sismógrafos de alta sensibilidad utilizados en sismología y en el monitoreo de los ensayos de armas nucleares, pues existe un gran número de sensores sísmicos menos sofisticados diseñados para ciertas aplicaciones prácticas concretas, en cuya construcción son más relevantes otros factores.
Sismómetros y sismógrafos
Para empezar, debemos dedicarle unas cuantas palabras a los términos "sismómetro" y "sismógrafo". Por una parte, tenemos el sensor, es decir, el dispositivo que convierte el movimiento del suelo en una señal eléctrica, al que se le llama sismómetro. En ocasiones es conveniente que el registro de la señal sea almacenado en un lugar diferente a aquél donde está instalado el sismómetro, con el fin de no perturbarlo. Hasta hace algún tiempo, el registro se hacía sobre papel, pero en la actualidad se realiza en medios digitales.
Por otra parte, el sismómetro y la unidad de registro conforman, en su conjunto, un sismógrafo. En el caso de los sismógrafos antiguos esta diferencia no era tan clara, ya que, a menudo, ambos dispositivos eran inseparables (Wielandt, 2012). Desde su invención, los sismógrafos se han considerado instrumentos de medición altamente sensibles. En cierto sentido, hoy puede decirse lo mismo casi de cualquier instrumento científico de medición. Sin embargo, la fascinación que causa un sismógrafo se debe a algo diferente, y es que este instrumento registra mucho más que una simple medida física abstracta, que para alguien que no sea especialista en el tema puede no representar por sí misma más que un simple suceso, aunque perceptible e inquietante, de sacudida del suelo, cuya solidez e inmutabilidad nos parecen incuestionables en todo momento.
En un emplazamiento tranquilo que no se vea afectado por ninguna actividad antrópica que pueda producir vibraciones u otros tipos de movimientos, por leves que sean, por ejemplo, una cueva o una mina, un sismógrafo registra no solamente sismos de regiones cercanas, sino temblores suficientemente fuertes que puedan afectar estructuras alrededor del mundo. Además, un sismógrafo responde a los movimientos del suelo causados por la acción de las olas del mar, la fuerza de las mareas causadas por la acción gravitacional del Sol y la Luna, las cuales deforman la tierra firme a un ritmo semidiurno, así como diferentes efectos antrópicos como las vibraciones de grandes máquinas, las demoliciones en minas y, en algunas ocasiones, las pruebas de armas nucleares (Stein & Wysession, 2003).
Para la sismología global resultan de sumo interés los movimientos del suelo caracterizados por frecuencias de oscilación que casi no son perceptibles para el oído humano, es decir, frecuencias por debajo del umbral de audición: 10 Hz hasta 0,3 mHz (alrededor de una oscilación por hora). Las oscilaciones aún más lentas (de menor frecuencia) no están asociadas con los sismos, en tanto que las más rápidas (de mayor frecuencia) sí son provocadas por estos, pero se disipan antes de emerger a la superficie. En cercanías del epicentro, a distancias de algunas decenas de kilómetros, las vibraciones del suelo incluso pueden escucharse o propagarse en forma de ultrasonido. Los rangos superiores (de 30 a 50 Hz) de un registro sismográfico son, hoy en día, comunes. Por debajo del umbral de audición el espectro de las frecuencias de las señales sísmicas es considerablemente más amplio que el de nuestro oído: 15 octavas frente a 10 octavas (Lay & Wallace, 1995).
Desde el punto de vista técnico es claro cuán sensible puede ser un sismógrafo. El suelo casi nunca se encuentra totalmente quieto, presenta una débil pero permanente trepidación. Ni siquiera un buen sismógrafo es capaz de detectar aquellas señales que son más débiles que este ruido de fondo. Así que el reto técnico es significativo, ya que en la práctica todo es mucho más complejo que lo aquí expuesto, pues el ruido sísmico tiene diferentes intensidades según las diferentes frecuencias. Únicamente los componentes del ruido que tienen la misma frecuencia que la señal sísmica pueden interferir con ella, por lo que bastaría con que el sismógrafo registrara señales de todas las frecuencias de interés y coincidentes con el ruido sísmico con un nivel mínimo de precisión. Sin embargo, no existe aún un sismógrafo que cumpla a cabalidad con esta exigencia (Wielandt, 2012).
Básicamente, hay tres características que definen la sensibilidad de un sismógrafo: primero, debe ser capaz de medir pequeños desplazamientos de la masa sísmica, es decir, debe tener una resolución adecuada; segundo, debe permitir que a la llegada de una señal sísmica el desplazamiento de la masa sísmica sea considerable, pues en su posición de equilibrio solo debe estar ligeramente fija, en caso contrario, se moverá con el suelo y no habrá registro alguno; sin embargo, tampoco sirve que la masa sísmica esté totalmente suelta, pues se vuelve independiente, y tercero, la masa sísmica debe estar cuidadosamente protegida de perturbaciones externas, para lo cual se toman las precauciones mencionadas en la introducción.
Ruido sísmico
El ruido sísmico está compuesto por la superposición de muchas señales de origen natural o antrópico. Entre las señales naturales se destacan las generadas por los impactos de las olas del mar contra los continentes, señales que luego se propagan, ya no por el agua, sino por la parte sólida del planeta. Su periodo de oscilación típico es de unos seis segundos y pueden, según las condiciones meteorológicas, alcanzar amplitudes de hasta una centésima de milímetro. La microsismicidad generada por las olas del mar es tan fuerte y omnipresente que les sirve a los sismólogos como señal gratuita de prueba: un sismógrafo que no la registre seguramente está defectuoso (Bormann, 2012).
Para señales con periodos de vibración más cortos o mayores de 6 segundos, el ruido sísmico es mucho menor y, por lo tanto, no es tan fácil de registrar. Sin embargo, en muchos lugares el ruido sísmico también está relacionado con vibraciones de origen antrópico (industria, transporte, trabajos de construcción, etc.), y ya que para la instalación de los sismógrafos se eligen los lugares más tranquilos desde el punto de vista sísmico, siempre es necesario tener en cuenta los niveles mínimos de ruido sísmico presente.
Sorprendentemente, bajo las condiciones adecuadas el nivel de ruido sísmico es aproximadamente el mismo en todo el mundo (Figura 1S,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2973). A una frecuencia de 30 Hz debe ser posible medir desplazamientos tan diminutos como una mil millonésima de milímetro, ¡aproximadamente una centésima parte del diámetro de un átomo! Así de sensible debe ser el instrumento de medición de desplazamientos en un sismómetro.
En el otro extremo del espectro sísmico, con periodos de oscilación de algunos cientos de segundos, el desplazamiento del suelo es de alrededor de una diezmilésima de milímetro. Este valor puede parecer relativamente alto, pero, en realidad, resulta aún más difícil de medir, ya que una medición de este tipo se basa en las fuerzas de inercia que actúan sobre la masa sísmica, y para oscilaciones lentas estas fuerzas son del orden de unas pocas billonésimas del valor de la fuerza de la gravedad (Bormann, 2012).
Dos principios de medición
El dispositivo descrito es un sismógrafo inercial (Wielandt, 2012), para cuyo funcionamiento deben definirse los términos de inmovilidad y movimiento durante un sismo tomando como referencia únicamente el concepto de inercia de la masa sísmica.
Consideremos un vagón de tren en reposo que puede rodar libremente a lo largo de una vía horizontal. De repente, el suelo comienza a moverse en la dirección de la vía; el vagón no se verá afectado por el movimiento del suelo, permanecerá en reposo, pero sus ruedas girarán, por lo cual un observador ubicado en tierra creerá que el vagón se está desplazando. Las mismas consideraciones son válidas en el caso de un sismómetro, es decir, medimos el movimiento de la masa sísmica con respecto al marco (la estructura rígida del instrumento, que está firmemente apoyada en el suelo), aunque sabemos que en realidad es el suelo el que debió haberse movido en la dirección opuesta.
Hay otra manera fundamentalmente diferente de observar las ondas sísmicas recurriendo a las deformaciones que producen. Una onda sísmica no sacude el suelo como un cuerpo rígido, sino que lo deforma. Ciertamente, cuando la onda se propaga, las regiones vecinas del suelo se mueven por lo general de forma similar pero no simultáneamente. Así, por ejemplo, la distancia de separación entre dos pernos anclados en una roca cambia y al medir de forma continua esta distancia es posible identificar la presencia de ondas sísmicas. Por esta razón, para identificar la fluencia de una muestra de material en ingeniería civil, se utilizan dispositivos llamados extensómetros, cuyo funcionamiento se basa en este principio (Wielandt, 2012), y en sismología se les llama sismógrafos de deformación. Solo en tareas de medición muy concretas estos instrumentos alcanzan una sensibilidad comparable a la de los sismógrafos inerciales que son los que en adelante analizaremos.
Marcas de tiempo
Uno de los aspectos más importantes en el análisis de un sismograma es la determinación de la hora exacta. Las lecturas que se hacen sin la ayuda de un computador, es decir, manualmente, son las de los tiempos de arribo y de las amplitudes máximas de los distintos tipos de ondas. Por ejemplo, es posible determinar la localización de un evento con base en los diferentes registros de tiempo de arribo de la señal en tres o cuatro estaciones (Lowrie, 2007) y, a partir de la amplitud máxima de la señal y de la distancia previamente determinada, es posible calcular la magnitud local, conocida en sismología como magnitud en la escala de Richter.
Hasta hace algún tiempo, para facilitar la lectura precisa de la hora en los registros en papel al finalizar cada minuto se producía un corto movimiento de una aguja que dejaba una marca, y los segundos y las décimas de segundo debían ser obtenidos por interpolación. Para coordinar esto antiguamente cada observatorio sismológico contaba con un reloj de péndulo cuya lectura se comparaba vía telefónica una vez al día con la hora oficial, o escuchando la señal oficial por radio. Por ejemplo, en el primer observatorio sismológico en Stuttgart-Hohenheim (Alemania), ya en 1912 se recibían las señales de la hora oficial de la Torre Eiffel o de la radio de Norddeich.
Posteriormente se instaló un reloj de péndulo Riefler (1938), que contaba, por una parte, con un péndulo hecho de invar, una aleación de níquel-hierro que es prácticamente insensible a las variaciones de temperatura (Sears, et al., 2009), así como con un sistema de compensación del empuje por flotación ejercido por el aire. La precisión seguía siendo de una décima de segundo por día y la sincronización se llevaba a cabo mediante relojes de cuarzo. Actualmente, la hora exacta se determina en todo el mundo mediante una señal satelital, con una precisión de un microsegundo (Fowler, 2005).
Suspensión de la masa sísmica
Por lo general, la dirección de movimiento de la masa sísmica, como en el ejemplo del vagón de tren, es rectilínea. Hacer coincidir el movimiento de la masa sísmica con una línea recta en ausencia de fricción es relativamente difícil; es más fácil dirigir la masa a lo largo de un arco de circunferencia cuyo centro de curvatura está localizado en un eje al que está unida la masa mediante dos elementos lineales que se cruzan (Figura 2S,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2974). Sin embargo, existen sismómetros en los cuales la masa puede moverse en todas las direcciones (Stein & Wysession, 2003).
En la dirección de la medición la masa debe tener la posibilidad de moverse fácilmente, de tal manera que, bajo condiciones ideales, sin fuerza restauradora mecánica presente, se alcancen desplazamientos suficientemente grandes. Por otra parte, esta fuerza restauradora no puede reducirse arbitrariamente, pues debe compensar cada perturbación sísmica, en caso contrario la masa sísmica excedería el límite de desplazamiento del instrumento. Asimismo, la magnitud de la fuerza restauradora debe conocerse con precisión y debe ser invariable en el tiempo, de lo contrario se tendrá un detector, pero no un instrumento de medición.
Esta es una dificultad seria: cuanto menor es la fuerza restauradora, lo que hace que el sismógrafo sea más sensible, menos controladas son sus propiedades de transferencia. Los sismógrafos modernos resuelven este problema generando la fuerza restauradora electrónicamente en lugar de hacerlo mecánicamente. Abordaremos este aspecto más adelante.
En el caso de los sismómetros horizontales es relativamente fácil mantener una fuerza restauradora mecánica pequeña. Basta con fijar la masa excéntricamente a un eje de rotación casi vertical de tal manera que se mueva en un plano horizontal (Figura 2Sa,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2974).
En el caso de los sismómetros verticales es necesario hacer algo adicional, ya que se debe compensar el efecto de la gravedad. Una de las soluciones más elegantes fue hallada por el físico estadounidense Lucien LaCoste en 1934: un péndulo de resorte con la masa sostenida por un resorte pretensado con una, así llamada, longitud-cero en reposo tal que la masa, teóricamente, se encuentra en su posición de equilibrio en cada posición (Figura 2Sb,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2974). El funcionamiento de muchos sismómetros y gravímetros (instrumentos de medición de la gravedad) se basa en este principio. Por cierto, las puertas abatibles superiores de un garaje o un mueble tienen un mecanismo de funcionamiento similar: en cada posición es el resorte el que soporta la mayor parte del peso.
En los sismógrafos modernos a menudo se utiliza un sistema de suspensión más sencillo (Figura 2Sc,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2974), con un resorte plano que se comporta de manera similar al diseño de LaCoste en un rango angular limitado (Wielandt, 2012).
Por otra parte, dependiendo de la magnitud de la fuerza restauradora y, por lo tanto, del periodo de oscilación de la masa, es posible distinguir entre sismómetros de periodo corto y de periodo largo. Los mayores valores del periodo de oscilación producidos de manera netamente mecánica se encontraban en torno al medio minuto: ¡un péndulo simple con este periodo debería tener una longitud de 225 metros! (Sears, et al., 2009). En el caso de una fuerza restauradora con control electrónico hoy es posible alcanzar periodos de oscilación de hasta seis minutos: ¡lo que corresponde a un péndulo simple de 32 km de longitud! Sin embargo, la sensibilidad aún depende de la suspensión mecánica, lo que quiere decir que la construcción de un sismómetro sensible sigue siendo principalmente un problema de mecánica fina.
El medidor de desplazamiento
Medir los desplazamientos de la masa sísmica en centésimas del diámetro atómico parece algo sacado de la ciencia ficción, sobre todo si nos fijamos en la rugosidad de su superficie manifiesta en esta escala. Pero no hay ninguna ley de la naturaleza que impida medir pequeños desplazamientos de un cuerpo lo suficientemente masivo. Por ejemplo, mediante el uso de interferómetros láser es posible realizar mediciones con una precisión superior en varios órdenes de magnitud a lo aquí expuesto. Sin embargo, esta opción no se utiliza en el caso de los sismómetros, pues es técnicamente muy exigente y costosa.
La manera más práctica de determinar el movimiento de la masa sísmica es mediante un transductor electrodinámico, tal como se aplica en el caso de los micrófonos y los altavoces. Esto consiste en fijar a la masa sísmica una bobina de alambre de cobre, la cual se sitúa entre los polos de un imán fijo; con frecuencia, la masa de la bobina juega el papel de masa sísmica. Luego, debido al movimiento de la bobina en el campo magnético del imán, en el cable (alambre de cobre) se induce un voltaje (Sears, et al., 2009) que, a continuación, puede amplificarse electrónicamente y luego registrarse. Con base en este principio hoy solo funcionan los sismómetros de periodo corto (frecuencias a partir de 1 Hz) y los llamados geófonos, los cuales se utilizan en trabajos de exploración sísmica (Telford, et al., 1991).
En el caso de los sismómetros de periodo largo, la señal de salida del transductor electrodinámico es tan débil que no se alcanza el nivel de sensibilidad requerido. Así que, para medir los movimientos lentos del suelo, es mejor usar un sensor de desplazamiento en lugar de uno de velocidad (Wielandt, 2012).
Entre los diferentes métodos la medición de la distancia diferencial capacitiva ha resultado ser la más eficaz. En principio, aquí se compara mediante una medición eléctrica el tamaño de los dos espacios de aire entre tres pequeñas placas de metal, de las cuales la de la mitad es móvil (Sears, et al., 2009). Puede registrarse un desplazamiento de la placa central del orden de una milmillonésima parte de la distancia de separación entre las placas externas, es decir, ¡aproximadamente el grosor de un cabello comparado con el ancho del Canal de la Mancha! Por otra parte, en emplazamientos tranquilos una separación de unas pocas décimas de milímetro entre las placas resulta ser suficiente para identificar el ruido sísmico de periodo corto.
Perturbaciones externas
La temperatura, la presión atmosférica, los campos magnéticos, el movimiento del aire dentro de la carcasa del instrumento, cualquier tipo de radiación, etc., pueden ejercer influencia sobre la masa sísmica y su sistema de suspensión y llegar a perturbarlos. A continuación, presentamos algunos ejemplos cuantitativos de dichas perturbaciones.
La fuerza ejercida por un resorte estándar varía un 0,03 % por cada grado de variación de la temperatura. En los resortes fabricados con ciertas aleaciones especiales esta fuerza permanece invariable hasta un 0,001 %. Sin embargo, para su adecuado funcionamiento un sismómetro vertical sensible la fuerza ejercida por el resorte no debe variar en más de un 0,000 000 001 % por cada grado de variación de la temperatura, es decir, debe ser seis órdenes de magnitud menor en comparación con las variaciones que experimentan los resortes fabricados con aleaciones especiales (Wielandt, 2012).
En cuanto a la temperatura, resultaría inútil tratar de mantenerla invariable en un rango de una millonésima de grado, pero aquí solo estamos considerando cambios periódicos que pueden mantenerse pequeños mediante el uso de aislamiento.
Por otra parte, la presión atmosférica varía permanentemente (varios pascales en cuestión de minutos), lo cual cambia las características de flotación de la masa sísmica en un 0,000 001 % de su peso, es decir, tres órdenes de magnitud más para un sismómetro vertical sensible. Una carcasa resistente a la presión, que preferentemente se encuentre al vacío, puede ayudar, pero si no está bien diseñada, se deformaría como reacción a los cambios de presión atmosférica, lo cual genera aún mayores perturbaciones que las producidas por las variaciones de las características de flotación.
Por último, mencionaremos un tipo de perturbación que, aunque muy pequeña, es inevitable: el efecto del movimiento térmico browniano sobre la masa sísmica. Esta perturbación es producto, principalmente, de la colisión de partículas de aire contra la masa sísmica. En condiciones de equilibrio térmico y en ausencia de todo tipo de señal sísmica, la masa sísmica tiene en promedio la misma energía cinética que una molécula de aire, es decir, E = 1/2 kT en cada dirección, donde k es la constante de Boltzmann y T es la temperatura absoluta (Sears, et al., 2012). En el caso de masas sísmicas grandes su amplitud de movimiento es imperceptiblemente pequeña, pero cuando se trata de masas del orden de 100 g la amplitud resulta medible. Así pues, cuando un sismómetro de masa sísmica pequeña alcanza el nivel de máxima sensibilidad se hace necesario generar vacío, con el fin de evitar el efecto del movimiento browniano (Wielandt, 2012).
Técnicas de registro
En tiempos en los que las señales sísmicas eran registradas sobre papel, a primera vista la técnica de registro podía parecer un asunto menor. Sin embargo, desde mediados del siglo XIX, cuando comienza el desarrollo de los sismógrafos modernos, el proceso de registro de las señales sísmicas ha sido un problema técnico que ha obstaculizado los avances y ha conducido a soluciones incómodas. En la práctica, resulta que las señales sísmicas tienen el aspecto que la Tierra como planeta les imprime, por lo que simplemente no son adecuadas para el registro sobre papel.
Como ya hemos mencionado, las señales sísmicas con frecuencias en diferentes intervalos del espectro de frecuencias pueden manifestarse con muy diferentes intensidades (por ejemplo, el nivel de afectación de diferentes estructuras). Así, las señales correspondientes a la microsismicidad generada por las olas del mar puede ser mil veces más intensa que la señal del terremoto que se desea evaluar. En principio esta situación no es un obstáculo cuando las señales son lo suficientemente diferentes en sus contenidos frecuenciales, en cuyo caso pueden ser separadas mediante el uso de filtros de frecuencia. Sin embargo, una vez las señales quedan registradas en forma impresa es demasiado tarde, ya que el ojo humano no es capaz de distinguir diferentes aportes frecuenciales de manera adecuada. Para los sismógrafos clásicos, que cuentan con un registro impreso directo, esto significó un problema casi sin solución.
Para obtener registros razonablemente legibles era necesario procesar la información en rangos de frecuencias y de amplitudes muy limitados. La evolución temporal del movimiento del suelo, necesaria para conocer el proceso de fracturamiento en el foco del sismo, podía ser reconstruida a partir de sismogramas, pero de una forma tediosa e imprecisa. Con el fin de reducir la imprecisión, se incrementaba la sensibilidad de la mayoría de los sismógrafos, por lo que en los terremotos fuertes, los sensores de las estaciones cercanas a sus epicentros quedaban saturados, así que había muy pocas estaciones capaces de registrar adecuadamente eventos fuertes, pues no estaban calibradas a niveles de sensibilidad suficientemente altos para evitar el problema de la saturación (Fowler, 2005). Una de las excepciones a este problema fue la estación del servicio sismológico de Württemberg, donde se requería mucha perseverancia para operar un sismógrafo con amplificación baja durante largo tiempo, por lo que en sus registros, tal vez, se pudiera identificar algo en diez o 20 años.
Durante mucho tiempo el registro en cinta magnética introducido en los años 60 del sigo XX (ya sea en forma análoga o digital), no superó en calidad el registro en papel. En 1976 se produjo un gran avance en Alemania con la construcción del Observatorio Sismológico Central en Erlangen, en el cual se implementó la más avanzada tecnología digital de la época (Trnkoczy, et al., 2012). Gracias a este avance por primera vez fue posible registrar señales sísmicas en un rango frecuencial relativamente amplio de manera simultánea para ser separadas posteriormente de manera exitosa.
En esa época, la recién surgida técnica digital aún debía demostrar que podía aportar resultados igual de satisfactorios a los mejores registros sismográficos en papel. En la práctica, hoy los registros en papel no se utilizan para realizar lecturas, sin embargo, eventualmente pueden servir para detectar fallas de funcionamiento, además de tener valor histórico.
Finalmente, el problema del registro sísmico fue resuelto satisfactoriamente cuando se desarrolló el conversor análogo-digital (A/D) con resolución de 24 bits, con el cual quedaron cubiertas las necesidades específicas de la sismología (Asch, 2012). Gracias a estos conversores es posible extraer señales ocultas por otras un millón de veces más fuertes, pero de frecuencias diferentes. Así que ahora no es necesario aplicar el filtrado previo ni el ajuste automático de amplificación para poder registrar sin problema las señales sísmicas.
Por su parte, un sismógrafo de banda ancha es capaz de registrar casi todas las señales sísmicas, incluso vibraciones fuertes, en tanto que los sismógrafos especiales se requieren únicamente para registrar las señales correspondientes a eventos destructivos. Así pues, de la mezcla de señales se extraen las porciones de información que son de interés y se presentan gráficamente a una escala razonable. Es como si un sismólogo pudiera escoger a posteriori y a su gusto la forma de ajustar el sismógrafo antes de cada terremoto. De esta manera, en la actualidad el registro de sismos no solo es más sencillo y más preciso, sino también mucho más económico.
Historia
La invención del primer instrumento conocido para la detección de terremotos se le atribuye al sabio chino Zhang Heng, en el año 132 de nuestra era. Consistía en un gran jarrón con ocho cabezas de dragón ubicadas a los lados, cada una de las cuales sostenía una esfera de bronce (Figura 1). En caso de producirse un terremoto, alguna de las esferas sostenidas por los ocho dragones caía e indicaba la dirección de la cual provenía el impulso (China Science and Technology Museum - CSTM, 2019; China Central Television -CCTV-9, 2019).

Figura 1 Indicador de terremotos (sismoscopio), invento del sabio chino Zhang Heng, 132 a.C. Adaptado de CSTM (2019) y CCTV-9 (2019)
En Europa los indicadores de terremotos denominados sismoscopios (instrumentos que indican la aparición de un evento sísmico sin cuantificarlo) entraron en uso desde comienzos del siglo XVIII, sin embargo, contribuyeron poco al entendimiento de los sismos. En aquel entonces se suponía que las causas de los sismos eran explosiones subterráneas, con lo cual el movimiento del suelo sería intermitente y se propagaría alejándose del foco del sismo. En definitiva, las indicaciones de los pocos y muy diversos sismoscopios nunca aportaron una imagen clara acerca del fenómeno. Solo a partir de la década de 1880 los primeros sismogramas evidenciaron que el movimiento del suelo tiene una estructura y una secuencia muy complicadas: en ocasiones la dirección de movimiento cambia y el máximo desplazamiento del suelo puede ser transversal a la dirección de propagación.
A partir de 1856 los sismógrafos más utilizados fueron los electromagnéticos, desarrollados por el sismólogo y vulcanólogo italiano Luigi Palmieri. Estaban integrados por varios péndulos metálicos que cerraban un circuito eléctrico a la menor vibración; mediante un mecanismo de electroimanes se detenía un reloj que indicaba la hora del terremoto y comenzaba a funcionar una especie de registrador Morse que marcaba los subsiguientes cierres de contacto. Al parecer estos dispositivos eran muy sensibles y continuaron siendo utilizados incluso después del cambio de siglo, hasta que se inició el registro de los datos con los sismógrafos modernos.
Se puede afirmar que el físico italiano Filippo Cecchi fue el inventor del sismógrafo en el sentido moderno del término, es decir, un dispositivo que registra con precisión la evolución temporal del movimiento del suelo (Dewey & Byerly, 1969). El dispositivo de Cecchi fue presentado en 1875, pero su sensibilidad era tan baja que pasaron 12 años para que registrara su primer sismo. Es por ello que el honor de haber obtenido el primer sismograma le correspondió a un grupo de científicos ingleses dirigido por John Milne, en 1880, durante una visita a Japón (Reitherman, 2012). Dado que la sensibilidad del sismógrafo estaba limitada por la fricción mecánica, solo se podían registrar los sismos cuyos epicentros eran cercanos a la estación. El registro se realizaba sobre discos giratorios de vidrio ennegrecido y, más tarde, sobre papel ahumado y mediante fotografías.
El primer registro de un evento lejano fue una feliz coincidencia. Ernst von Rebeur-Paschwitz, astrónomo alemán, había instalado en 1889 sismógrafos con péndulo horizontal y registro fotográfico sobre bases para telescopios en Potsdam y Wilhelmshaven para monitorear la inclinación de dichas bases. Una perturbación ocurrida simultáneamente en las dos estaciones condujo a una explicación sorprendente cuando el astrónomo leyó en la revista Nature un informe acerca de un gran terremoto ocurrido en Japón. Este descubrimiento es considerado ahora como el nacimiento de la sismología global. En la figura 2 se muestra este sismograma, considerado el más famoso del mundo.
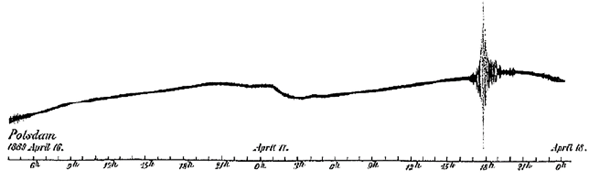
Figura 2 Primer sismograma conocido correspondiente a un terremoto lejano registrado en 1889 en Potsdam. En el desplazamiento máximo la luz de la lámpara era demasiado débil para dejar huella sobre el papel fotográfico. Adaptado de Schweitzer & Lee (2003)
En los siguientes 20 años la sismología tuvo un desarrollo espectacular, tanto en la comprensión teórica como en las características instrumentales. Alrededor de 1910 se desarrollaron prácticamente todos los sismógrafos que, luego de mejoras graduales, llegarían a prestar sus servicios hasta bien entrada la segunda mitad del siglo XX, cuando la electrónica de semiconductores impulsó una nueva fase en el desarrollo de la instrumentación.
El sismógrafo mecánico
El sismógrafo horizontal de Bosch-Omori, uno de primeros sismógrafos mecánicos, fue instalado en 1905 en la estación sismológica de Stuttgart-Hohenheim. Este sismógrafo fue desarrollado por el sismólogo japonés Fusakichi Omori, perfeccionado por los ingenieros Joseph y Albert Bosch de Estrasburgo y construido en Stuttgart en la empresa Tesdorpf (Bosch & Bosch, 1907). Contaba con una masa sísmica de 50 kg en forma de cilindro delgado vertical, al cual se agregaban posteriormente masas adicionales. El movimiento del suelo era amplificado de 30 a 50 veces sin necesidad de multiplicadores de transferencia gracias a la longitud del mango en el cual se encontraba la aguja. El sistema de registro consistía de un tambor giratorio impulsado por un mecanismo de reloj sobre el cual se extendía un papel ahumado. Además, el dispositivo contaba con un pistón para amortiguar las oscilaciones naturales del péndulo.
De la misma época (1902) es el péndulo vertical de Adolfo Cancani (bien conservado) instalado en el Observatorio Vesubiano, que cuenta con un mecanismo de palancas que amplifica el movimiento de la masa sísmica a la aguja y un amortiguador hidráulico. Al igual que el sismógrafo Bosch-Omori, el registro se realizaba sobre papel ahumado.
El mayor problema de todos los sismógrafos mecánicos siempre fue la fricción de la aguja al escribir sobre el papel. Para superar este inconveniente era necesario usar masas cada vez más grandes con una amplificación cada vez mayor. El sucesor del sismógrafo de Bosch-Omori fue el péndulo cónico instalado por Carl Mainka en 1913, con una amplificación de 200 veces y un peso de 450 kg, en tanto que su sucesor, del tipo Wiechert, 1937, pesaba 17 toneladas y tenía una amplificación de 1.200 veces. Esta línea no continuó su desarrollo (Reitherman, 2012).
Ahora bien, en el caso de los sismógrafos verticales, para los cuales la masa sísmica debía ser colgada de un resorte, era necesario luchar contra la sensibilidad del acero del resorte a las variaciones de temperatura, pues hasta los más mínimos incrementos de temperatura hacían que la fuerza recuperadora del resorte se redujera, la masa sísmica descendiera, la aguja se desplazara con respecto a su posición central y las marcas de registro se mezclaran. Sería Emil Wiechert, sismólogo de la ciudad de Gotinga, quien construyera alrededor de 1910 el primer sismógrafo vertical razonablemente estable ante las variaciones de temperatura. En este sismógrafo el resorte se apoya sobre barras de zinc cuya expansión térmica permite al resorte volver a tensarse. Este tipo de sismógrafo llegó a ser estándar en todo el mundo.
En la figura 3 se muestra un sismógrafo de periodo corto de tres componentes de Emil Wiechert y Ludger Mintrop (pionero en la exploración sísmica de yacimientos minerales), el cual podía amplificar el movimiento del suelo hasta aproximadamente 16.000 veces gracias al mecanismo de transferencia por palanca y al puntero de luz (Schweitzer & Lee, 2003; Reitherman, 2012; Ramírez, et al., 2004; Dirección General del Instituto Geográfico Nacional, España, 2004).
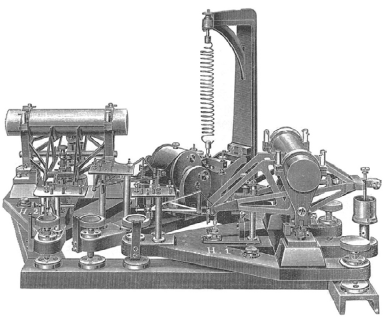
Figura 3 Tres sismómetros de periodo corto de E. Wiechert y L. Mintrop sobre una base común. Adaptado de Schweitzer & Lee (2003)
Pero probablemente el sismógrafo mecánico más sofisticado y robusto que se haya construido jamás es el sismógrafo universal de Alfred de Quervain y Auguste Piccard, instalado en 1922 en la estación sismológica de Zúrich, construida exclusivamente con esa finalidad (Figura 4). Este sismógrafo consistía en una masa sísmica de 21 toneladas que podía moverse en las tres dimensiones y que estaba suspendida de resortes helicoidales; sus desplazamientos se determinaban tomando como referencia su centro de gravedad y en cada dirección de movimiento (norte-sur, este-oeste y vertical) se amplificaban dos mil veces mediante un apalancamiento triple. La mecánica era tan precisa y sin desplazamiento aleatorio alguno, a tal punto que podía registrar movimientos del suelo del orden de una diezmilésima de milímetro.
Un aspecto novedoso y especialmente elegante de este sismógrafo fue la solución que se le dio al problema de la sensibilidad a la temperatura, el cual se solventó mediante un dispositivo de control automático. Dependiendo de la posición de la aguja que indicaba el movimiento vertical del suelo una vez por minuto, una pequeña cantidad de agua se vertía cuidadosamente en un contenedor ubicado en la masa sísmica o se extraía de él mediante un control eléctrico; tal cantidad era necesaria para compensar la variación de la fuerza recuperadora del resorte según fuera verano o invierno, y en total se podían verter más de 80 kg de agua. Todos los sismógrafos modernos cuentan con un control de posición similar, pero, por supuesto, ya no con agua, sino con un sistema electrónico.
Resulta interesante mencionar un detalle acerca del origen del material con el que estaba fabricada la masa sísmica. Consistía en unos 800 bloques de acero adquiridos originalmente por el ejército suizo para la fabricación de granadas. Dicho material fue entregado a los científicos en calidad de préstamo con la condición de que fuese devuelto, en caso de guerra, en el término de 48 horas. En 1922 esta fue una precaución extraordinaria. Quervain y Piccard optaron por dejar una inscripción en latín: Et conflabunt gladios in vómeres ("Y que se forjen las espadas en rejas de arado"), y con ello destinaron a la ciencia el acero, que nunca fue reclamado de vuelta.
El sismógrafo electrodinámico
Uno de los sismólogos más prominentes del siglo XX fue el del príncipe ruso Boris Galitzin, cuyo extraordinario trabajo "Lecciones sobre sismometría" fue publicado en 1912 en ruso y en alemán. A Galitzin le debemos el invento del sismógrafo electrodinámico en 1904 (Figura 5).
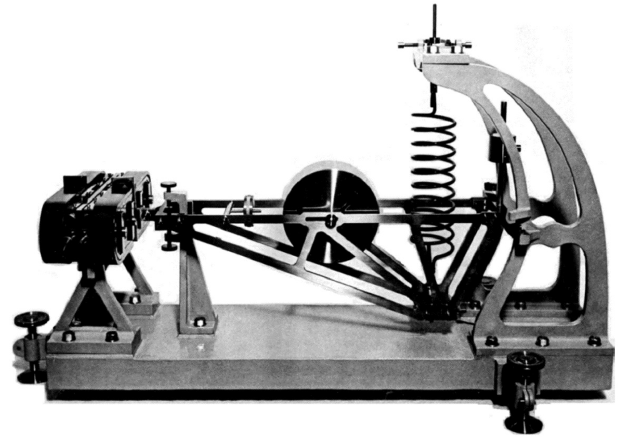
Figura 5 Sismómetro electrodinámico de Galitzin (1904), un diseño genial para su época. Algunos de los que se encuentran en funcionamiento hoy en día están basados en ese modelo. A la izquierda se observan los imanes del transductor electrodinámico. Adaptado de Schweitzer & Lee (2003)
En un principio, este tipo de sismógrafo no podía competir con los sismógrafos mecánicos, pero después de algunas mejoras llegó a ser el tipo de sismógrafo predominante, conservando este estatus hasta alrededor de 1970 (Ponomarev & Sidorin, 2012; Kondorskaya, 2003).
En el sismógrafo de Galitzin la masa sísmica está conectada a un transductor electrodinámico; cuando ocurre un movimiento el transductor genera una señal eléctrica y esta es registrada mediante un galvanómetro que tiene un espejo incorporado. De esta manera se eliminó la fricción de la aguja contra el papel, que era el mayor problema de los sismógrafos mecánicos. Además, el transductor es sensible solo al movimiento de la masa, no a su posición, por lo tanto, la temperatura juega un papel mucho menor que en los sismógrafos mecánicos. Sin embargo, debido a la geometría del resorte, la sensibilidad en la medición aún dependía de la ubicación de la masa y, por lo tanto, de la temperatura. Este problema solo fue resuelto en 1930 gracias a la invención de LaCoste y al desarrollo de aleaciones menos sensibles a la temperatura.
Por otra parte, aunque la señal eléctrica de salida del sismómetro en la época de Galitzin no podía ser amplificada electrónicamente, el principio electrodinámico de medición permitió por primera vez lograr una gran amplificación con una masa sísmica relativamente pequeña (10-20 kg). Con el tiempo fue posible conectar otros dispositivos de registro en lugar de los galvanómetros con puntero de luz, lo que permitió que los sismómetros electrodinámicos fueran aún más pequeños (Ponomarev & Sidorin, 2012; Kondorskaya, 2003). Cabe aclarar que los galvanómetros son, en un sentido estrictamente físico, aparatos de medición casi ideales para señales eléctricas débiles (cuentan con respuesta lineal y carecen de ruido), por lo que no fueron superados por los amplificadores electrónicos durante mucho tiempo debido al ruido y la distorsión no lineal que estos provocaban.
Sismógrafos modernos
La función principal de un sismómetro, como hemos descrito hasta ahora, se reduce a dos pasos: primero, convertir el movimiento del suelo en un movimiento relativo entre la masa sísmica y el marco del sismógrafo, y, segundo, realizar la medición como tal. Una buena descripción del movimiento del suelo se logra solo si ambos pasos se llevan a cabo con calidad. Esto implica una dificultad importante, ya que es extremadamente difícil hacer que la fuerza restauradora sea muy pequeña y, simultáneamente, lo suficientemente estable.
El hecho de que este problema se solucione mediante la introducción de una fuerza restauradora grande producida electromagnéticamente sorprende al principio. La idea básica consiste en que, en lugar del desplazamiento, lo que se mide es la fuerza de inercia que actúa sobre la masa sísmica y que surge cuando la masa se desplaza con respecto al marco debido al movimiento del suelo. No es posible medir la fuerza sin permitir también un desplazamiento, pero este desplazamiento puede mantenerse, en principio, arbitrariamente pequeño.
Consideremos un experimento mental con el gran sismógrafo de Zúrich. Imaginemos que podemos configurar el control automático de la posición de la aguja para controlar, no una vez por minuto (como en la versión original del gran sismógrafo) sino continuamente la posición de la aguja y traer de vuelta la masa sísmica a su posición de equilibrio mediante la adición de cierta cantidad de agua. Con estas condiciones, la aguja ya no oscilaría significativamente y la masa prácticamente se movería junto con el suelo. Para ello, este esquema debe proporcionar una fuerza impulsora que corresponda exactamente a la aceleración del suelo, por lo tanto, la cantidad de agua (el peso del agua) en el depósito debe corresponder en todo momento a la aceleración del suelo. Además, para observar la señal sísmica tendríamos que hacer un seguimiento del nivel del agua en el depósito y registrarlo, en lugar de registrar el movimiento de la aguja.
Vamos a considerar ahora las siguientes propiedades de un sismógrafo modificado de esta forma, el cual es, en algunos aspectos, notablemente mejor.
Teóricamente puede medir todo tipo de señal, sin importar qué tan fuerte sea, con la condición de que haya suficiente agua, pues ya no está limitado por el rango de movimiento mecánico de la aguja, que ahora solo se desplaza lo necesario para activar el mecanismo de regulación.
Ya no es cuestión de qué tan complejo es el diseño mecánico, pues la cantidad de agua en el depósito de nivelación siempre corresponde a la aceleración instantánea del suelo. Debido a esto, es prácticamente irrelevante para el resultado de la medición si la transferencia por apalancamiento se amplifica de 1.000 a 2.000 veces o, incluso, si la amplificación no es constante.
A pesar de que el rango de medición es mayor que antes, la sensibilidad de detección de pequeños movimientos del suelo se mantiene. Un movimiento del suelo que antes provocaba una desviación mensurable de la aguja ahora está relacionado con la variación en la cantidad de agua, por lo tanto, cualquier señal que quedara registrada en el papel ahora podría ser identificada midiendo el nivel del agua. Y dado que el nivel es controlado eléctricamente, podríamos simplemente registrar la señal de control en lugar de medir el nivel del agua. ¡Incluso teóricamente sería posible contar las gotas de agua y obtener un sismógrafo con una señal de salida digital!
Es claro que en este experimento mental hemos dejado de lado algunas dificultades técnicas, ya que es mucho más fácil controlar un sistema eléctrico que construir uno hidráulico. Aquí reducimos la masa sísmica a decenas o cientos de gramos, y sustituimos la aguja y el sistema de transferencia por apalancamiento por un medidor de velocidad electrónico sin contacto, así como el tanque de agua por un transductor electrodinámico, con el que también es posible convertir una corriente eléctrica en una fuerza (como en los altavoces). El circuito de control, entonces, establece una corriente en la bobina que sea proporcional a la aceleración de todo el dispositivo. Estos sistemas (con una masa sísmica de unos pocos gramos) se llaman acelerómetros, y se utilizan, por ejemplo, para la navegación inercial o como medidores de vibraciones de origen industrial (Telford, et al., 1991).
La sensibilidad de los acelerómetros es baja, por lo tanto, son menos adecuados para el registro de señales sísmicas débiles. Sería necesario aumentar su sensibilidad al menos en cinco órdenes de magnitud, pero, en ese caso, el sensor se saturaría fácilmente por sismos o vibraciones de gran amplitud, como las de origen industrial, por ejemplo. Sin embargo, la solución está a la mano: en lugar de registrar directamente la corriente que controla el transductor de fuerza, dejamos que la corriente cargue un condensador. El voltaje entre las placas es proporcional a la velocidad de movimiento del suelo, pero, al ser relativamente menor a altas frecuencias, puede ser procesado con mucha mayor facilidad que la corriente. De esta manera, se obtiene un sismógrafo de banda ancha, que en cierto sentido es inmune a la sobrecarga, por lo cual, sería extraño que no pudiera "soportar" un terremoto, por fuerte que éste sea.
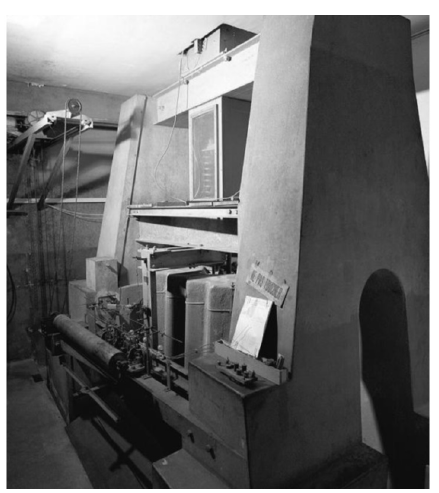
En la figura 6 se muestra la parte mecánica interna del sismómetro vertical de banda ancha, desarrollado en 1976 por Erhard Wielandt (coautor del presente trabajo) y Gunar Streckeisen en la Escuela Politécnica Federal de Zúrich (Eidgenõssische Technische Hochschule Zürich). En comparación con un sismógrafo mecánico (por ejemplo, el que se muestra en la figura 3), este sistema pendular tiene un aspecto primitivo y, con excepción del material utilizado para la fabricación del resorte plano, hubiera sido posible construirlo en el siglo XIX. De hecho, actualmente se utiliza una mecánica menos rigurosa que antes, pero se observa una superioridad técnica del sistema de control electrónico. Sin embargo, el dispositivo resulta ser mucho más complejo si tomamos en cuenta la protección del sensor contra los cambios de temperatura y de presión atmosférica, así como frente a los campos magnéticos externos, por lo que puede registrar señales diez mil veces más débiles que el sismógrafo de Zúrich de 21 toneladas.
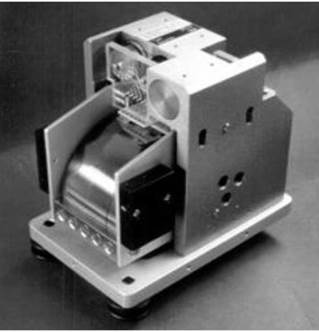
Figura 6 Sismómetro con resorte plano, versión más compacta del sistema con péndulo de resorte plano, cuyo esquema se muestra en la Figura 2Sc. Las dos piezas negras a la izquierda (por delante y por detrás) son las masas sísmicas entre las cuales se encuentra el resorte plano. En la parte superior se encuentran dos sistemas de bobinas para retroalimentación de la fuerza y el transductor. Adaptado de Wielandt & Streckeisen (1982)
Ejemplo de un sismograma
Es el momento de considerar con mayor detalle el sismograma, resultado final de todos nuestros esfuerzos al construir un sismómetro.
En la figura 7 se muestra el sismograma de un terremoto que tuvo lugar en California (26/11/1976) y fue registrado en Zúrich con un prototipo de sismómetro con resorte plano. Se trata de un sismograma filtrado de periodo largo que solo contiene oscilaciones lentas de al menos 30 segundos de duración y, por lo tanto, es bastante claro.
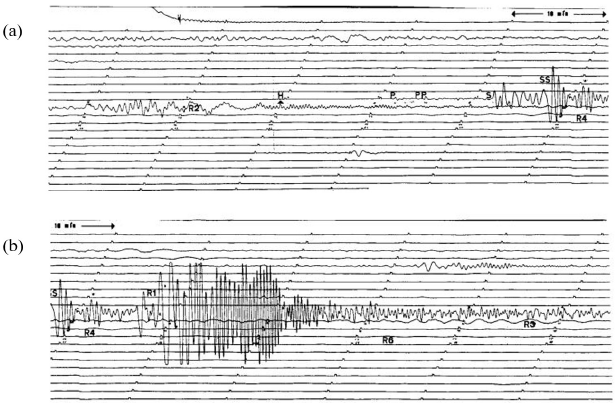
Figura 7 Sismograma registrado en Zúrich de un terremoto ocurrido en California (26/11/1976). H: tiempo de origen; P, PP, S y SS: arribo de las ondas de cuerpo (longitudinales y trasversales, respectivamente); R1 a R6: arribo de las ondas de superficie. Intervalo entre las marcas de tiempo: 10 minutos. Los sismogramas (trazas) de la figura (a) y de la (b) conforman un único sismograma: las secciones con SS (derecha de la figura (a)) y R4 (izquierda de la figura (b)) deben superponerse para conformar un único sismograma (la figura (b) es continuación de la figura (a)). Las trazas son como líneas de impresión que se leen de izquierda a derecha y de arriba hacia abajo
La marca H en el centro de la figura 7a denota el tiempo de origen de las ondas sísmicas (momento del evento sísmico medido en el epicentro). El sismógrafo ubicado en Zúrich responde unos 13 minutos más tarde, con una pequeña alteración (P). Este es el tiempo que necesitan las ondas sísmicas más rápidas, es decir, las longitudinales, en su viaje a través del manto terrestre, en el que penetran hasta unos 2.500 km de profundidad. Un poco más tarde (PP) arriban las ondas que no han penetrado tan profundamente y que, a mitad de camino, han sido reflejadas de la superficie de la Tierra hacia abajo, para luego propagarse nuevamente hacia la superficie. Luego se observa algo de quietud hasta que arriban las ondas transversales S, cuya velocidad en el manto terrestre alcanza un valor cercano al 58 % del de las ondas P. Este tipo de ondas también cuenta con ondas rezagadas (SS) que se reflejan en la superficie terrestre.
Todos los tipos de ondas mencionados arriban al sismómetro desde "abajo", no propagándose por la superficie de la Tierra, es decir que proceden del manto, por lo tanto, se les llama ondas de cuerpo, en este caso, el cuerpo del planeta
La siguiente parte del sismograma está dominada por las llamadas ondas de superficie, que se propagan de manera similar a las ondas en la superficie del agua, pero esta vez lo hacen sobre la superficie terrestre. Estas ondas reciben el nombre de ondas Rayleigh (R1) (parte izquierda de la figura 7b) en honor al físico británico Lord Rayleigh. Las ondas de superficie están visiblemente dispersas; las ondas de longitudes de onda más larga llegan antes que las de longitud de onda más corta.
Las ondas Rayleigh son seguidas por la llamada coda (parte final o "cola" del sismograma), que consiste en ondas de superficie dispersas (mitad derecha de la figura 7b). Por supuesto que después de ser registradas por el sismógrafo, las ondas de superficie continúan su viaje alrededor de la Tierra: después de tres horas aparece nuevamente el tren de ondas R1, que ahora se llama R3 (derecha de la Figura 7b), esta vez fuertemente atenuado al llegar por segunda vez al sismógrafo después de dar la vuelta completa a la Tierra. En el registro original es posible identificar el siguiente paso de R1, ahora como R5, y en el medio se pueden ver los trenes de ondas R2 y R4, así como los indicios de R6, que han rodeado la Tierra propagándose en la dirección opuesta.
Pero todas estas ondas son solo una pequeña parte de las ondas generadas por un terremoto. Después de un terremoto fuerte la Tierra vibra durante más o menos una semana, tal como lo hace una campana al ser golpeada, hasta que las oscilaciones disminuyen por debajo del límite de detección.
El sismograma contiene una gran cantidad de información, tanto acerca de la región del epicentro, como de la estructura interna de la Tierra y únicamente una pequeña parte de esta información puede verse en esta reproducción tan "suavizada". Sin embargo, es la parte que, en cierta medida, podemos entender con nuestro conocimiento actual acerca de la estructura de la Tierra.
Un sismograma como este, que muestra hasta la coda puede recalcularse utilizando un modelo computacional de la vibración de la Tierra. La similitud entre los sismogramas reales y los modelos computacionales es lo suficientemente buena como para garantizar que no estamos muy lejos del modelo "real" del planeta. Por otro lado, un sismograma obtenido mediante el uso de un sensor de periodo corto por lo general abarca solamente un intervalo corto de tiempo, durante el cual las ondas de cuerpo son visibles y cuantitativamente modeladas, en tanto que el resto de la información no es siquiera descifrable.
Metadatos
Los datos que arroja una red sismológica son los registros sísmicos, en tanto que los meta-datos, entendidos como "datos acerca de otros datos", incluyen la ubicación de las estaciones, los tipos de instrumentación, los métodos de transmisión de los datos registrados, la información acerca de los terremotos registrados, etc. En definitiva, los metadatos sirven para mejorar y respaldar los archivos de datos de las formas de onda, lo que permite hacer más fluido el intercambio abierto de información y de ideas entre redes sismológicas que operan en el área de estudio, así como con la comunidad sismológica global (Incorporated Research Institutions for Seismology - IRIS, 2019).
Como se destaca en la declaración de la Unión Geofísica Americana (AGU) sobre la importancia de la preservación a largo plazo y la accesibilidad de los datos geofísicos, la recopilación, el análisis y el almacenamiento de datos en el campo de las ciencias de la Tierra y el espacio son esenciales para nuestra comprensión del entorno natural y de cómo éste cambia con el tiempo (American Geophysical Union - AGU, 2009). Con esto en mente, la política de la AGU se basa en el principio del intercambio total y abierto de dichos datos y de los metadatos asociados para la investigación y la educación.
Dado que los conjuntos de datos se utilizan a menudo para fines distintos de aquéllos para los que fueron recopilados, los metadatos precisos, completos y estandarizados (cuando ello es posible) son tan importantes como los datos mismos (AGU, 2009). Podemos afirmar, entonces, que los datos de las ciencias de la Tierra y el espacio son patrimonio mundial. Correctamente documentados y almacenados, estos datos ayudarán a los futuros científicos a comprender el sistema conformado por el interior de la Tierra, la atmósfera, los océanos, la biosfera y el entorno espacial. En consecuencia, cuidar adecuadamente de ellos es nuestra responsabilidad y nuestra obligación con las generaciones futuras (AGU, 2009).
En este sentido, ¿cómo están las cosas en el caso de la región de Latinoamérica y el Caribe? El territorio latinoamericano se encuentra ubicado en una zona de convergencia, donde las placas oceánicas Pacífica, Cocos, Nazca, Antártica y Caribe subducen bajo las placas continentales de Mesoamérica y Suramérica, lo que genera una amplia zona de deformación en la que se emplaza un cinturón orogénico con permanente actividad volcánica y recurrente actividad sísmica de diversas magnitudes y profundidades. Específicamente debido a las variaciones en los ángulos de subducción de la placa Nazca bajo la placa Suramericana, se observa una alternancia en el vulcanismo y cambios en las profundidades hipocentrales a lo largo del borde occidental del continente americano (Lowrie, 2007; Fowler, 2005; Lay & Wallace, 1995).
En este laboratorio natural se encuentra el arquetipo de los nidos sísmicos más activos y, en algunos casos, más profundos del mundo, como, por ejemplo, el nido sismoactivo de Bucaramanga (Colombia), producto posiblemente de la convergencia entre las placas Suramericana, Nazca y Caribe. Asimismo, en el sur del continente también encontramos zonas de convergencia de tres placas, como es el caso de la subducción de las placas Nazca y Antártica bajo la Suramericana y la interacción entre las placas Antártica, Suramericana y Scotia. Lejos de la zona de subducción, la sismicidad prevalece debido a procesos de equilibrio isostático o procesos de origen antrópico, particularmente en áreas de márgenes pasivas (Lowrie, 2007; Fowler, 2005; Lay & Wallace, 1995).
Bajo este panorama de permanente actividad sismotectónica y volcánica, se hace necesario el despliegue de redes sismológicas permanentes y temporales (Vargas, et al., 2018). Desde inicios del siglo XX y hasta hoy, dichas redes han evolucionado tecnológicamente para garantizar cada vez mayor sensibilidad y cobertura para diversos propósitos.
En el Anexo,https://www.raccefyn.co/index.php/raccefyn/article/view/1166/2975 presentamos una descripción sucinta de las redes sismológicas instrumentales que realizan dichas actividades de monitoreo en la mayoría de los países de la región de Latinoamérica y del Caribe. La solicitud de compartir los metadatos de las redes fue enviada a todos los países de la región y de la mayoría se recibió la información solicitada. Las redes de algunos países no contestaron y es por ello que no figuran en esta publicación. La información se presenta en forma de fichas de metadatos y en orden estrictamente alfabético por países para garantizar comparaciones operativas y de tendencias tecnológicas. La información aquí presentada ha sido tomada textualmente del material enviado por los colegas de las diferentes redes, sin que los autores del presente trabajo editaran su contenido en forma alguna.

