










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkRevista Ciencias de la Salud
Print version ISSN 1692-7273On-line version ISSN 2145-4507
Rev. Cienc. Salud vol.4 no.1 Bogotá Jan./June 2006
Desarrollo kinesiológico: la interpretación de un proceso para facilitar el movimiento corporal humano
Kinesiological Development: Interpretation of a Process to Enhance Body Movement
Marlen Rojas Rojas*
* Fisioterapeuta. Especialista en Neurodesarrollo, Asociación Norteamericana de Neurodesarrollo. Especialista en Docencia Universitaria, Universidad del Rosario. Docente del programa de Fisioterapia de la Universidad del Rosario. E-mail: marrojas@urosario.edu.co
Recibido: diciembre 15, 2005. Aceptado: enero 10, 2006.
Resumen
Este artículo hace una revisión del proceso de producción del movimiento funcional durante el primer año de vida, en un marco kinesiológico, donde se toma el tronco como estabilizador y eje principal en la ejecución motora de las extremidades. La interpretación presentada, facilita el entendimiento de los elementos motores básicos necesarios para construir una actividad más compleja y funcional, lo cual fortalece la habilidad del profesional para observar, evaluar y enfocar su acción en el manejo de personas con discapacidad funcional motora.
Esta información es producto de la revisión de la literatura relacionada con el desarrollo normal del movimiento corporal humano y la observación directa del proceso de desarrollo normal y anormal en múltiples niños durante más de 12 años de experiencia profesional. En general, la revisión resalta la interrelación en las actividades de cada segmento corporal con otros y no como elementos aislados, así como la producción de eventos en común desde lo mecánico pero con propósitos diferentes desde lo funcional.
Palabras clave: Actividad Motora, Desordenes de la Habilidad Motora, Niño, Niños con Discapacidad, Desarrollo Infantil, Habilidad Motora, Traslado de Peso, Marcha, Rotación.
Abstract
This article makes a review about the process of functional movement production along first year of life, within the framework of kinesiology, where trunk is considered stabilizer and main axis in motor execution of extremities. The present review facilitates understanding of basic motor elements needed to develop a more complex and functional activity, which strengthen professional skills to observe, evaluate and focus its action in managing persons with motor functional disability.
This information result from a literature review relates to normal movement development of human body segments and direct observance of the normal and abnormal process on several children for more than 12 years of professional experience. In general, this review stands out the relationship between activities of each corporal segment with others rather than showing isolated parts and, in the same way; it remarks production of simultaneous mechanics events which have different functional purposes.
Keys words: Motor Activity, Motor Skills Disorders, Child, Disabled Children, Child Development, Motor Skills, Weight-Bearing, Walking, Rotation.
Entender el proceso de la producción de movimiento corporal humano es muy complejo y hace necesario considerar la intervención de muchos sistemas actuando paralela y cooperativamente para alcanzar un trabajo (1). Sin embargo, esta revisión hace clara su posición multisistémica pero trabaja específicamente en el área de la kinesiología entendida como la ciencia o estudio de los movimientos musculares del ser humano (2), y además ofrece un fundamento importante en el trabajo terapéutico del control motor.
Cuando se quiere orientar un proceso que busca alcanzar movimientos coordinados y funcionales es necesario conocer las teorías del control motor que revelan los códigos abstractos en la producción del movimiento, pero cuando se quiere aplicar control motor es necesario entender el proceso normal kinesiológico de la producción de movimiento en los casos de desarrollo normal, para poder entenderlo, detectarlo y aplicarlo en un desarrollo motor anormal.
El movimiento necesita de una base estable que proporcione el apoyo para su ejecución (3); en el recién nacido la flexión fisiológica proporciona esa base que, aunque involuntaria, da origen a los primeros movimientos voluntarios rotacionales en el plano extensor visto en los intentos de levantar la cabeza de manera asimétrica alrededor del primer mes y culminando con la extensión simétrica de cabeza. Este orden se repite en cada segmento hasta lograr una extensión completa de tronco y extremidades en prono alrededor del sexto mes.
La flexión como movimiento voluntario emerge a partir del segmento que ha controlado la extensión y ahora le sirve de apoyo para que se desarrolle. Al cuarto mes se puede ver buena parte de ella a nivel de cabeza, al quinto o sexto mes se inicia en el tronco y hacia el año se puede ver presente y funcional la flexión en tronco y pelvis con buen trabajo de rectos abdominales y oblicuos abdominales, demostrando el buen control de la transición de supino a sedente en el plano antero-posterior.
Posteriormente, el segmento corporal desarrollado en el control de flexión y extensión puede mostrar las rotaciones que se presentan como un juego antagónico de grupos musculares ubicados en el mismo hemicuerpo. Es decir, una rotación a la derecha resulta del control de una flexión anterior con una extensión posterior.
Motivado por los alcances y su curiosidad por desplazarse (4), el niño necesita sumar los traslados de peso a las anteriores combinaciones y dominios, controlando otro componente esencial en el movimiento como es la inclinación. Ésta, kinesiológicamente funcional, debe producir una elongación (contracción excéntrica) del lado que soporta peso y, a su vez, un acortamiento (contracción concéntrica) del lado que libera peso y se desplaza o levanta (5). Es importante tener en cuenta este mecanismo pues, de presentarse en sentido opuesto el paciente, se caerá hacia el lado que no soporta peso y la función se vería imposibilitada.
LA ESTABILIDAD TAMBIÉN ES MOVIMIENTO
Analizar en forma global el desarrollo del movimiento corporal hace necesario revisar también los conceptos de estabilidad tanto estática como dinámica. Partiendo del concepto básico del punto de apoyo como aquel segmento o punto que proporciona la estabilidad y sin el cual podría darse un movimiento coordinado dirigido e intencionado como es el movimiento funcional. Si observamos, cada vez que se da un movimiento se tiene un segmento muy cercano que le da estabilidad (6). Es el caso de la eleva ción del brazo durante un alcance, la escápula estabiliza el hombro, en tanto que en la marcha el miembro inferior y la pelvis ipsilateral que toman la carga ofrecen la estabilidad para el avance del miembro inferior opuesto.
La estabilidad se desarrolla en el niño en forma secuencial, en dirección proximal–distal controlando primero la estabilidad estática y luego la dinámica: la estabilidad estática o mecánica se da por cocontracción simultánea entre los músculos del plano frontal y sagital del segmento en juego, donde todavía no hay control recíproco entre los grupos musculares antagonistas, por tanto, no hay desplazamiento y el segmento se muestra en fijación fisiológica (7).
La estabilidad dinámica resulta de la coordinación del movimiento por inhibición recíproca en un segmento que ya ha aprendido a estabilizarse estáticamente y en donde se logra controlar el juego de grupos musculares antagonistas del segmento, por lo tanto, se permite el desplazamiento, y se posibilita el traslado de carga, la inclinación, la rotación y la flexo-extensión entre otros. Al mismo tiempo y proximal a este segmento en desplazamiento, se encuentra otro segmento en estabilidad estática que le da el apoyo ya que sin este no es posible el desplazamiento.
Aunque cada segmento corporal lo hace en forma similar, miremos sólo el caso de las cinturas escapular y pélvica: cerca del cuarto mes el niño muestra estabilidad mecánica en la cintura escapular (8), lo cual se ve porque éste puede ser capaz de mantener prono sobre antebrazos. En este momento no hay movimiento, sólo sostiene la posición, ya que no puede trasladar carga a un hombro para que el opuesto haga un alcance todavía. En el sexto mes, la cintura pélvica empieza su entrenamiento en la estabilidad estática (9) y le sirve de punto de estabilidad a la escápula para que sea dinámica y pueda hacer alcances. Más tarde, la pelvis será dinámica en la medida en que rodillas y cuello de pie le den la estabilidad. Esta secuencia de eventos debemos observarla más adelante cuando revisemos el desarrollo motriz del segmento inferior del tronco y la cintura pélvica durante los primeros meses.
EL TRONCO: MÁS QUE UN EJE PARA EL MOVIMIENTO
Durante el movimiento corporal se observan simultáneamente cantidad de acciones que hacen necesario descomponer, seleccionar y reagrupar cuando se busca entenderlo. El tronco pasa por cambios importantes que conllevan a modificaciones en la actividad de las cinturas escapular y pélvica, y en las extremidades. Igualmente, el tronco pasa por un proceso para alcanzar el control de la flexión y de la extensión, éste se sucede en tres niveles de actividad que permanecen en sinergia durante toda la vida (10). Entendiéndose como sinergia la acción simultánea de grupos musculares diferentes para reforzar la misma actividad, en el caso de los niveles de actividad del tronco, la sinergia hace que la actividad de un nivel refuerce el control de los otros.
La extensión: como movimiento voluntario se desarrolla primero que la flexión y se evalúa en posición prono. El primer nivel de extensión se observa por la elevación de cabeza y cuello de la superficie y se espera en el niño alrededor del segundo mes (músculos paravertebrales cervicales) (Figura 1). El segundo nivel de extensión se observa por la extensión torácica y lumbar alta manifestándose en el niño alrededor del quinto mes (músculos paravertebrales toráxicos y lumbares), en tanto que el tercer nivel de extensión muestra extensión lumbo-sacra con extensión de miembros inferiores mostrando una elevación de las piernas y la actividad de los músculos paravertebrales lumbares con glúteos mayor y medio, y se desarrolla en el niño después del sexto mes. Los tres niveles de extensión actuando en sinergia nos llevan a la posición de prono–pivote descrita por Margaret Rood, y se presenta de manera completa alrededor del sexto mes de edad (11).
La flexión: el patrón voluntario de flexión se inicia cuando la extensión del mismo segmento se ha desarrollado, sirviéndole como punto de estabilidad. Su evaluación se lleva a cabo en posición supina.
Al igual que la extensión también tiene diferentes niveles: el primer nivel de flexión corresponde a cabeza y cuello. En supino se presenta cuando el niño lleva el mentón en dirección al esternón, más o menos al quinto mes de edad, para mirarse sus miembros inferiores y/o sus pies (12). El nivel dos de flexión corresponde al trabajo del tronco superior, y se presenta cuando el niño tiene capacidad de sentarse solo desde supino o cuando en sedente puede inclinar su tronco detrás de la posición neutra (actividad que se inicia a los seis meses y se completa alrededor de los once meses de edad) (Figura 2). En supino se observa cuando eleva la cabeza, los hombros y la escápula del piso. Finalmente, el tercer nivel de flexión muestra su actividad en la elevación de tronco inferior, pelvis y miembros inferiores (iniciándose a los seis meses y perfeccionándose hacia los dieciocho meses de edad) (13).
Estos niveles tienen características comunes importantes y se constituyen en movimientos combinados con objetivos funcionales. Cada nivel se podría ejecutar independientemente estimulando la actividad de los otros dos en el mismo plano y la ejecución simultánea de los seis niveles de movimiento (tres de flexión y tres de extensión) potencializando al máximo la estabilidad y funcionalidad de cada segmento por el refuerzo de la sinergia.
Por ello, al realizar un nivel de flexión o de extensión, éste se refuerza si se incluye el nivel anterior, de lo contrario el nivel se ejecutará difícil o débilmente. De otra parte, es importante tener en cuenta que cada nivel puede realizarse aisladamente estimulando la actividad muscular del nivel anterior por sinergia. Si se piensa potencializar un segmento es más conveniente reforzarlo con la actividad de los anteriores teniendo en cuenta el orden de estos niveles y su actividad en sinergia. Cada patrón de extensión y de flexión se desarrolla y se mantiene para la funcionalidad del eje corporal principal considerado el tronco, y son la base para las reacciones posturales de defensa (reacciones de equilibrio) (14).
Teniendo en cuenta estos conceptos se mirará un segmento corporal para observar estos principios, analizando los eventos que son necesarios para su desarrollo kinesiológico.
CONTROL DEL MOVIMIENTO EN TRONCO INFERIOR Y EN LA PELVIS
Desde que el niño nace inicia su camino en busca del control de sus movimientos motivado por la curiosidad de explorar el mundo y hacer cosas dentro de él (15). El tronco es un punto de comunicación entre la parte superior y la inferior del cuerpo, en la parte inferior el puente principal de actividades y modificaciones se sucede a nivel de la pelvis.
Al igual que todos los segmentos corporales, la pelvis del recién nacido tiene sus características y cambios para empezar el largo proceso de control de sus movimientos pasando desde una pelvis en alto grado de fijación a una pelvis completamente dinámica, controlada y participativa en todos los eventos motrices tanto del tronco superior y sus funciones, como de las extremidades inferiores y sus acciones (16).
El recién nacido colocado en posición prono, muestra la pelvis levantada de la superficie de soporte causando un traslado de carga anterior y un soporte de carga primario en los hombros (17) (Figura 3). Del mismo modo, al ser colocado en supino, las caderas permanecen en flexión con ligera abducción y rotación externa provocando que los pies se mantengan levantados de la superficie de soporte. A pesar de que la columna vertebral del paciente se muestra redondeada (falta de actividad extensora) cuando se sostiene en sedente, la pelvis permanece perpendicular a la superficie. En ese momento se presenta el pataleo espontáneo, predominando el rebote flexor y retornando las caderas y rodillas a la posición de flexión establecida. Al ser sostenido en posición bípeda, las caderas permanecen en flexión y se ubican posteriores a la cintura escapular.
Primer y segundo mes: la gravedad tiene un efecto sobre la posición de las piernas elongando pasivamente los músculos anteriores de la cadera (18). En supino, las caderas se mueven en la dirección de extensión permitiendo a los pies llegar a la superficie de soporte. Las caderas, además, incrementan su abducción y rotación externa. En prono, la pelvis se acerca más a la superficie de soporte al disminuir la flexión de cadera, y como resultado del soporte de carga primario se desplaza más en sentido posterior. La columna vertebral permanece redondeada en sedente debido a la falta de desarrollo en la extensión y en bípedo al ser sostenido la cadera permanece posterior a los hombros debido a la pobre movilidad y retracción de los flexores de cadera (19). (Figura 4).
Tercer y cuarto mes: cuando los brazos se mueven hacia adelante en prono y la flexión de cadera disminuye, la pelvis se mueve en la superficie de soporte. La inclinación anterior de la pelvis también empieza a lograrse cuando el desarrollo de la extensión llega al área lumbar, lo cual es facilitado por la elongación incompleta de la musculatura flexora de cadera (20). La posición de la pelvis se ve afectada en esta posición por un aumento de la abducción y rotación externa de la cadera y lleva a una fijación posicional o anatómica de inclinación anterior de la pelvis (21). Lo anterior provee estabilidad inicial sobre la cual puede empezarse a mover el tronco superior. En supino, las piernas permanecen en posición de rana (flexión de cadera rodilla de 90º con abducción y rotación externa), y en tracción a sedente se nota una debilidad antigravitatoria por la poca participación de los abdominales y flexores de cadera. En sedente con apoyo, la pelvis del bebé empieza a inclinarse posteriormente, con el tronco inferior redondeado debido a que la fuerza de los extensores no es suficiente para soportar el tronco en una posición antigravitatoria. Esto y la poca fuerza de extensores de cadera, hace que el bebé se incline hacia adelante en sedente.
Quinto mes: este periodo de tiempo es importante para el desarrollo de fuerza muscular en la parte posterior del cuerpo y estiramiento de la musculatura de la parte anterior del tronco y pelvis. Lo anterior se logra fisiológicamente mediante la reacción de Landau que en este tiempo aumenta la fuerza de extensión espinal en el área lumbar (22) (Figura 5). En prono, la disminución de la abducción, de la rotación externa y de la flexión de cadera disminuye produciendo mejor alineación en las extremidades inferiores con respecto al tronco y disminuye la estabilidad postural. Estos factores y el imbalance en el control flexor hacen que el bebé role desde prono a decúbito lateral cuando se aumenta el pataleo espontáneo haciendo que la carga o peso se traslade lateralmente.
En supino se desarrolla la fuerza flexora antigravitacional permitiendo al bebé flexionar activamente las rodillas, dirigiéndolas hacia sus manos. Desde esta posición el bebé también rola a decúbito lateral gracias a las reacciones de enderezamiento en cuello y a la mayor fuerza en extensión. En la medida que los anteriores movimientos se practican, se desarrolla la movilidad antero-posterior de la pelvis. La tracción hacia sedente hace que los abdominales y flexores de cadera se fortalezcan. La fuerza de extensión lumbar se ve aumentada en sedente con apoyo, llevando la pelvis posteriormente a una posición perpendicular. En este momento una postura más erecta es posible por el aumento en la estabilidad y movilidad de cadera y una mayor actividad abdominal.
Sexto y séptimo mes: después de varias semanas de fortalecimiento de la musculatura extensora por la actividad del niño en prono y sedente, la reacción de Landau se vuelve más natatoria en naturaleza y el bebé se apoya en brazos semi-extendidos, se continúa facilitando la extensión lumbar y la extensión de cadera (23). La actividad aductora de la cadera también refuerza la extensión de la misma. Por tanto, en prono, las piernas tienen mejor alineación con el tronco. Se mantiene una suave rotación y abducción de cadera para agregar estabilidad. Cuando el bebé traslada su carga en esta posición, el control del balance entre flexores y extensores hace que el tronco y la cadera del lado sin soporte de peso empiecen a flexionarse. Este inicio de control lateral conlleva a un rango más amplio de movilidad pélvica. Los extensores de cadera y rodilla se elongan cuando el bebé trae sus pies hacia su boca y rola a la posición de decúbito lateral (24). La disociación pélvico-femoral empieza cuando el niño pasa mayor tiempo en decúbito lateral y la musculatura lateral es elongada.
En la posición de decúbito lateral, la disociación de los miembros inferiores se facilita desde esta posición en la medida en que la pierna ubicada en la parte superior se lleva adelante para aumentar la estabilidad (Figura 6). La actividad abdominal antigravitatoria se aumenta cuando el bebé asiste en la tracción a sedente. Ocasionalmente, se ve en este periodo que el bebé tracciona directamente a bípeda debido al aumento en la extensión de cadera. El balance entre flexión y extensión no está presente en posiciones erguidas, así que el bebé continua inclinándose hacia adelante en sedente. Esto ocurre, además, por la estabilidad/movilidad incompleta de la extensión de cadera. En bípeda las caderas permanecen en abducción y rotación externa, sin embargo el aumento en la actividad extensora de cadera y la elongación de sus grupos flexores permiten a la cadera moverse de manera alineada con los hombros.
En prono, debido al mejor control de tronco, se disminuye la flexión y la abducción de cadera durante el traslado de carga. El incremento en el control lateral y abdominal elimina la necesidad de fijación anatómica. La fuerza abdominal es, además, suficiente para estabilizar la pelvis y permitir al bebé empujar hacia atrás en prono. Esto facilita la extensión de cadera y la disociación pélvico-femoral. Cuando el niño trae los pies a su boca, la pelvis se eleva de la superficie de soporte debido a mayor actividad extensora de cadera, al aumento de la movilidad de cadera y al aumento en la fuerza abdominal (25). Este ejercicio ayuda a poner gran cantidad de estiramiento a los extensores cervicales.
El control lateral fuerte del tronco y la pelvis permite al niño levantarse más alto en decúbito lateral y hacer uso de ello funcionalmente (26). En decúbito lateral se ha ganado un mejor movimiento aislado de cadera permitiendo a la flexión y rotación externa llevar el pie adelante en posición de soporte de peso (Figura 6).
Cuando el niño se mueve de supino a prono y exhibe reacciones de equilibrio en ambas posiciones, se evidencia un aumento de los movimientos aislados con aumento del control y fuerza en tronco. El bebé tracciona independientemente a sedente cuando los abdominales y flexores de cadera están fuertes (27), y en sedente el tronco está erecto gracias al balance en el control de flexores y extensores. El control lateral en esta posición sedente todavía no es funcional, así que las caderas permanecen en posición de rana para proveer estabilidad postural. En este sentido, la posición sedente ha ganado mayor estabilidad en extensión de cadera lo cual previene al bebé de colapsarse hacia delante. Esto muestra que, en gran cantidad de casos en los que un bebé no se sienta erguido, puede faltar fuerza en extensores lumbares del tronco, en extensores de cadera o en ambos.
Octavo mes: continúa el fortalecimiento del control lateral y las reacciones de equilibrio de tronco y pelvis en prono habilitando al niño para pivotear y apoyarse en posición cuadrúpeda con el abdomen elevado de la superficie de soporte.
A pesar de que el bebé puede empujar hacia atrás en posición cuadrúpeda, él mantiene una flexión de cadera mayor de 90º debido a un escaso control de la extensión en posiciones de soporte de peso. Desde esta posición, el bebé puede pasar a sedente moviendo el tronco sobre la pelvis y cadera (Posición sedente lateral ver figura 7). Los miembros inferiores son los primeros movilizadores, la pelvis y la cadera se mueven como una unidad (28). Además, los miembros inferiores son mantenidos en abducción y rotación externa para proveer estabilidad en los movimientos del tronco superior.
El niño, además, puede pasar nuevamente a prono moviendo también su tronco sobre la pelvis y las piernas. Los abdominales se convierten en los principales movilizadores cuando traccionan de supino a sedente no siendo esencial la participación de los flexores de cadera. Frecuentemente se usa el decúbito lateral como una posición de juego (29) en la medida en que los movimientos laterales se fortalecen y permiten un aumento en el rango de alcances en ésta postura. La pierna ubicada en la parte superior patea adelante y atrás reflejando que el movimiento en el miembro inferior es mejor y aislado. Cuando el niño empieza a traccionar hacia la posición bípeda y empieza a cruzar entre los muebles, usa simultáneamente la abdución seguida de adducción de ambos miembros inferiores. A pesar que el bebé inicia el traslado de peso a través de la pelvis, todavía no es capaz de levantar una pierna al tiempo. Las caderas y piernas empezarán a moverse bajo la pelvis cuando la estabilidad general de la cadera mejore. Tanto en sedente como en bípeda, se observa una postura lordótica normal.
Noveno mes: aparecen las reacciones de equilibrio en sedente en la medida en que los miembros inferiores salen de la posición de abducción y rotación externa en la que han permanecido desde que el niño inicia a ponerse en pie en el anterior mes (30). Cuando la anterior posición de bloqueo disminuye, se permite la rotación de tronco.
El bebé, además, muestra posiciones de sedente lateral y sedente largo, y es capaz de moverse desde sedente a través de sedente lateral hasta cuadrúpedo gracias al aumento de la estabilidad y movilidad de cadera y al control aislado del tronco (Figura 7). Estos movimientos aislados son indicativos de una continua disociación pélvico-femoral.
En cuadrúpeda, muestra un patrón de gateo lateral de cuatro puntos debido al desarrollo incompleto de reacciones de equilibrio en dicha posición. También se ve un aumento en la estabilidad de cadera notorio por la habilidad de trasladar peso posteriormente en cuadrúpeda y de subir a rodillas por medio de una acción inversa (contracción excéntrica) del músculo cuadriceps. Los extensores de cadera no son todavía suficientemente fuertes para lograrlo. El niño es capaz de jugar en posición de rodillas debido a una buena estabilidad en tronco (31).
A pesar que el bebé tracciona hacia semi-arrodillado cuando se prepara a pasar a la posición bípeda, él asume bípeda extendiendo simultáneamente sobre ambos miembros inferiores. Pero semanas más tarde mejora el control de esta transición y lo hace con un miembro inferior al tiempo. Estando en posición bípeda, se apoya en un miembro superior o en el pecho y hace traslado de carga rotando internamente la pelvis sobre la pierna que soporta el peso. Este cambio en la pelvis en relación con las piernas conlleva a mayor disociación, lo que se muestra también en la forma diagonal de cruzar con ambos miembros inferiores en continua abducción pero con una cadera en flexión y la otra en extensión. El niño desciende desde la posición bípeda a la posición sedente mediante una caída brusca hacia atrás; esto, debido al pobre control de la contracción excéntrica del glúteo mayor y del cuadriceps.
Décimo mes: el fortalecimiento continuo en posiciones laterales le permite jugar en una posición de decúbito lateral más alta (32). Aunque el movimiento asumiendo y dejando el sedente lateral desde cuadrúpedo ocurre, la falta de estabilidad y movilidad completa en pelvis y cadera limita la capacidad para mantener una posición de sedente lateral para el juego. Cuando las reacciones de equilibrio se desarrollan en cuadrúpedo, el niño demuestra un patrón más recíproco de gateo.
El niño continúa traccionando para posicionarse en medio arrodillado al prepararse para la posición bípeda. Sin embargo, asume la posición bípeda desde una posición de cunclilla diagonal (33). Es más factible descender desde bípeda a medio arrodillado si los miembros superiores lo soportan para mayor control. En bípeda, se necesita un soporte más inferior en los abdominales para que los miembros superiores puedan jugar libremente. Durante la marcha con apoyo se ve aumento de la rotación pélvica con mayor traslado de carga sobre la pelvis y miembros inferiores, por lo cual hay mayor movimiento de los miembros inferiores con relación al tronco. Las caderas se mantienen en rotación externa para proveer mayor estabilidad.
Undécimo mes: es el tiempo en el que la abducción de los miembros inferiores logran un control tal que proveen la estabilidad postural cuando el niño empieza el sedente corto (34), es decir que puede sentarse seguro y sin apoyo en una banca.
El traslado de carga (peso) lateral extremo todavía no ocurre por la inestabilidad de la pelvis en una posición más erguida como por ejemplo en la posición de rodillas o la posición bípeda al hacer un alcance cruzando línea media o un alcance con abducción humeral. Por lo tanto, el niño, para hacer un alcance, mantiene una fuerte posición de enderezamiento lateral. El niño es capaz de descender al piso rotando el tronco sobre la pelvis y las extremidades inferiores asumiendo la posición cuadrúpeda. A partir de aquí el niño puede devolverse a la posición de rodillas para jugar.
Duodécimo mes en adelante: es el periodo en el cual se logra el balance en posición bípedo sin apoyo, los primeros pasos y la marcha. Para ello es necesario terminar de fortalecer el control de la extensión de cadera y la estabilidad lateral de la pelvis; ello se logra mediante otras actividades.
El niño desciende desde bípeda a cuclillas con un mayor control de tronco y caderas. En este momento, todos los músculos de tronco, pelvis y caderas han elongado y están aumentando su control en posiciones y movimientos antigravedad más difíciles. El niño asume y sale de todas las posiciones con control. Los miembros superiores se usan menos para traccionar a bípeda desde rodillas o cunclillas.
Sobre sus rodillas, el niño muestra una mayor pero no completa extensión de cadera, pues todavía debe lograr mayor control abdominal y de extensión de cadera en posición erguida. La disociación de pelvis y miembros inferiores es evidente al cruzar entre muebles y durante la marcha, con manos elevadas, y cuando hace traslado normal de carga en forma independiente.
La marcha independiente se presenta y mientras sea inestable la realiza con miembros inferiores en amplia abducción y flexión lateral de tronco sobre el lado que soporta carga. Al ser la marcha independiente, una tarea más difícil, el niño usa la adducción de escápula para reforzar la extensión de escápula (Figura 8). En la medida en que se logre mayor control extensor del tronco inferior y lateral de pelvis, se disminuirá la abducción de los miembros inferiores dando una base de sustentación normal, el tronco se mostrará erguido y los miembros superiores se muestran libres y dinámicos para manipular objetos y cargarlos.
CONCLUSIONES
Las retracciones fisiológicas que el niño adquiere por la posición intrauterina le sirven al recién nacido para iniciar el desarrollo de su control. Los puntos de fijación y posturas mantenidas le sirven de apoyo para empezar a estabilizar los primeros movimientos voluntarios, como lo hace la flexión del tronco y la flexión de los miembros superiores sirviendo como base de sustentación para el levantamiento de la cabeza.
En el primer y segundo mes se hace notable la función de la gravedad y la postura corporal en el inicio del estiramiento de las estructuras retraídas que permiten al niño cambiar su soporte de peso desde los hombros a segmentos más caudales o inferiores. El tercero y cuarto mes dan inicio a la actividad extensora de la pelvis que permite el logro de posiciones en meses posteriores. El quinto y sexto mes son el tiempo de notable fortalecimiento del grupo extensor de tronco inferior y del grupo abdominal, sin dejar de trabajar en el fortalecimiento de los segmentos superiores.
Después de lograr posiciones, el bebé empieza a dominarlas para jugar dentro de ellas como lo muestra el séptimo y octavo mes, periodo en el que comienza a mostrarse muy dinámico y funcional, actividad que a su vez le sirve para continuar el fortalecimiento de los grupos musculares.
El desarrollo del movimiento es un proceso en cadena. Cada aumento o disminución en la postura y control del movimiento conlleva a otras posiciones, movimientos y al desarrollo de habilidades. En el niño, dicho proceso se da naturalmente mediante el juego, la curiosidad y la motivación para descubrir, mediante la repetición de acciones y el placer que encuentra en el movimiento. Entender este proceso es fundamental para a crear movimiento en el cuerpo humano bien sea para un individuo con desarrollo anormal o para uno que, habiendo logrado el desarrollo, ha perdido sus funciones. En cualquiera de los casos se necesita de un proceso en donde cada logro de movimiento se construye facilitando la presencia del nivel anterior.
El tronco y la pelvis son segmentos importantes en el logro de la estabilidad de las posiciones de soporte de peso como el sedente largo, sedente corto, sedente lateral, cuadrúpeda, rodillas, semi-arrodillado y bípeda pero son fundamentales en el balance en bípedo y la marcha. El tronco inferior por su ubicación y su control muscular es el comunicador esencial entre los miembros inferiores y todas las actividades de la cabeza y los miembros superiores de manera que los apoya, los modifican y los coordina kinesiológicamente.
FIGURA 1. Un bebé de 4 semanas muestra la activación de los niveles de extensión. En la fotografía superior la cabeza esta pasiva, en la inferior la actividad del primer nivel extensor activa el segundo nivel y hasta parte del tercero. Nótese el cambio postural y la actividad en tronco inferior y miembros inferiores.

FIGURA 2. Niveles de flexión, el primero activa en forma de sinergia los otros dos.

FIGURA 3. La fotografía superior muestra una bebé de 2 semanas de nacida y la inferior una bebé de 4 Semanas. Véase la posición elevada de la pelvis, la cadera sobre las rodillas en abducción y rotación externa, los codos debajo y caudales con respecto a los hombros y obsérvese el soporte de peso principalmente sobre cabeza y hombros.

FIGURA 4. En un bebé de pocas semanas la flexión fisiológica de cadera hace que en posición vertical la articulación de la cadera se coloque posterior a los hombros.

FIGURA 5. Extensión completa de tronco con extensión, rotación externa y abducción de cadera.
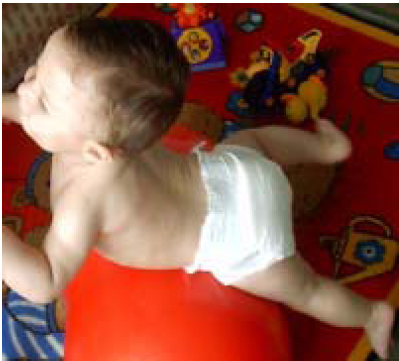
FIGURA 6. En la posición decúbito lateral, el miembro inferior con el pie adelante está trabajando la estabilidad lateral de la cadera.
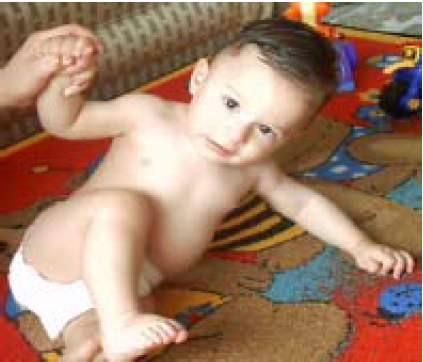
FIGURA 7. La posición sedente lateral usada para traslado a la posición cuadrúpeda, para alcances amplios durante el juego. Necesita de estabilidad lateral de la pelvis y mejora la movilidad del tronco sobre la pelvis.

FIGURA 8. Posición bípeda inicial con fijación en miembros superiores y miembros inferiores en rotación externa y abducción de cadera.

BIBLIOGRAFÍA
1. Shumway-Cook, Anne. Woolacott, Marjorie. Motor Control. Lippincott Williams & Wilking. 1995. Baltimore USA. Cap. 2. [ Links ]
2. Webster´s New World Dictionary. Neufeldt, Victoria. Third college edition. New York. 1991. [ Links ]
3. Keshner, E. Controlling stability of a complex movement system. Physical Therapy. 70: 844 - 854. 1990. [ Links ]
4. Heriza, C. Motor development: traditional and contemporary theories. En Contemporary Management of motor control problems. Alexandria, VA. M. Lister, 99-126. 1991. [ Links ]
5. Williams, M. y Shellenberger, S. How does your engine run?. Albuquerque, Nuevo México. TherapyWorks, Inc. 1992. [ Links ]
6. Deutsch, F. Analysis of postural Behavior. Series 2, Vol XII, num.2. Academy of science, New York, 1967. [ Links ]
7. Edwards, S. Neurological physiotherapy: a problem solving approach. Churchill livingstone. 1996. [ Links ]
8. Boehme, R. Improving upper body control. Tucson, Arizona. Therapy Skill Builders. 1998. [ Links ]
9. Alexander, R., Boehme, R., y Cupps, B. Normal development of functional motor skills. Tucson, Arizona. Therapy Skill Builders. 1993: 79-90. [ Links ]
10. Hypes, Barbara. Facilitating development and sensoriomotor function: treatment with the ball. Hugo, Minnesota, PDP Press, 1991. [ Links ]
11. Stockmeyer, Shirley Ann. An Interpretation of the Approach of Rood. En American Journal of Physical Medicine. Vol. 46. Febrero de 1967 [ Links ]
12. Le bouch, J. Desarrollo Psicomotriz desde el nacimiento hasta los seis años. Ed PaidoTribo. 1ª ed. 2000; p. 16 - 339. [ Links ]
13. Gilfoyle, Eleonora. Children adapt: a theory of sensorimotor – sensory development. Thorafore: Slack editors. New Jersey. 1990; p. 159 - 300. [ Links ]
14. Diamant, R. Positioning for play. Tucson, Arizona. Therapy Skill Builders. 1992:18. [ Links ]
15. Brazelton, T.B. Observation of the neonato. Journal of American academy. Child Psychiat, 5. 1994. [ Links ]
16. Hooker, D. Fetal Behavior, child behavior and development. MacGraw- Hill. 1989. [ Links ]
17. Bobath, B. Actividad refleja postural anormal causada por lesiones posturales. Tercera edición. Editorial Panamericana. 2000. [ Links ]
18. Dearborn, G.V. N. Motor sensory Development: observations on the first three years of a child. Warwick & York. Baltimore. 1980 Rev. Cienc. Salud. Bogotá (Colombia) 4 (1): 59-72, enero-junio de 2006 / 69 Desarrollo kinesiológico: la interpretación de un proceso para facilitar el movimiento corporal humano [ Links ]
19. Bly, L. Components of normal movement during the first year of life and abnormal motor development. NDT, Inc. Chicago. 1993:50-54. [ Links ]
20. Gessell, A.L. The first five years of life. Infant Development. New York: Harper. 1992. [ Links ]
21. Davis, Suzanne. American NDTA course- 8 weeks. Plantation, Florida. 1996: 5:45-60. [ Links ]
22. Davis, Suzanne. American NDTA course- 8 weeks. Plantation, Florida. 1996: 7:32-40. [ Links ]
23. Cech, D. y Martin, S. Functional movement development across the life span. Washington. Saunders company.1995. [ Links ]
24. Zuluaga, Jairo Alberto. Neurodesarrollo y Estimulación. Ed. Médica Panamericana. 2001. [ Links ]
25. Bly, Louis. Components of normal movement during the first year of life and abnormal motor development. NDT, Inc. Chicago. 1993: 74-76. [ Links ]
26. Levitt, Sophie. Tratamiento de la P. C. y del retraso motor. 3ª edición. Editorial Panamericana. [ Links ]
27. Escalona, S. A commentary upon child development. Editorial M.J. E. Senn. New York. Jr. Foundation. 1987. [ Links ]
28. Ratliffe, Katherine. Clinical Pediatric Physical Therapy. Editorial Mosby, St. Louis, Missouri, USA. 1998. Cap. 7: 163-216. [ Links ]
29. Diamant, R. Positioning for play. Tucson, Arizona. Therapy Skill Builders. 1992: 36. [ Links ]
30. Richards, T. W. y V. L. Nelson. Abilities of infants during the first eighteen months. Columbia university press. 1994. [ Links ]
31. Caplan, F. y Caplan, T. The first twelve months of life. New York. Grosset and Dunlap. 1985. [ Links ]
32. Alexander, R., Boehme, R., y Cupps, B. Normal development of functional motor skills. Tucson, Arizona. Therapy Skill Builders. 1993:184-200. [ Links ]
33. Alexander, R., Boehme, R., y Cupps, B. Normal development of functional motor skills. Tucson, Arizona. Therapy Skill Builders. 1993: 156-160. [ Links ]
34. Balint, A. The early years of life. Basic Books. New York. 1991. [ Links ]

