










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Cited by Google
Cited by Google -
 Similars in
SciELO
Similars in
SciELO -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkProspectiva
Print version ISSN 1692-8261
Prospect. vol.14 no.1 Barranquilla Jan./June 2016
https://doi.org/10.15665/rp.v14i1.646
Diseño y simulación de un controlador en tiempo discreto para regulación de temperatura en un invernadero a escala
Design and simulation of a discrete time controller for regulating temperature in a scale greenhouse
Oscar Bellon Hernandez1, Humberto Amador Soto2, Erika Rodríguez Lozano3
1 Magister en Ingeniería de Control Industrial, Docente de Tiempo Completo Programa de Ingeniería Mecatrónica, Universidad de Boyacá, Grupo de Investigación GIMAC, Tunja, Colombia
2 Magister en Ingeniería Eléctrica, Docente de Tiempo Completo Programa de Ingeniería Mecatrónica, Universidad de Boyacá, Grupo de Investigación GIMAC, Tunja, Colombia
3 Magister en Pedagogía (c). Docente de Tiempo Completo Programa de Ingeniería Mecatrónica, Universidad de Boyacá, Grupo de Investigación GIMAC, Tunja, Colombia. E-mail: oabellon@uniboyaca.edu.co
Cite this article as: O. Bellon, H. Amador, E. Rodriguez, "Design and simulation of a discrete time controller for regulating temperature in a scale greenhouse", Prospect, Vol 14, N° 1, 80-88, 2016.
Doi: http://dx.doi.org/10.15665/rp.v14i1.646
Recibido 13/03/2015 Aceptado 25/08/2015
RESUMEN
Este documento describe el proceso de diseño de un controlador de temperatura trabajando en tiempo discreto para mantener el interior de un invernadero protegido del efecto destructivo de las heladas climáticas nocturnas. Como variables manipuladas no simultáneamente se utilizaron: la potencia térmica específica y la velocidad del flujo de aire a temperatura mayor que el exterior. Primero se formuló un modelo dinámico deducido analíticamente y que involucrara a las variables de entrada mencionadas junto con la temperatura interna del invernadero como variable de salida. El procedimiento de validación se basó en la respuesta paso del sistema ante una entrada de potencia térmica y en el comportamiento en estado estable. Un diseño factorial se ejecutó para determinar parámetros restantes generados por la inclusión de la variable velocidad de flujo entrante. Tal resultado fue el punto de partida para simular pruebas de evaluación del desempeño del controlador obtenido ante escenarios donde la temperatura externa al invernadero se configuró para representar dos situaciones: temperatura ambiente exterior en el punto de congelación y comportamiento de la temperatura durante el transcurso de una noche de helada climática por radiación. Tales situaciones simuladas mostraron que el controlador mantenía el sistema sin riesgo de daños por congelación.
Palabras clave: Controlador en tiempo discreto; Regulación de temperatura; Modelado de invernadero; Helada climática; Potencia térmica; Velocidad de flujo de aire.
ABSTRACT
This paper describes the design process of a temperature controller working in discrete time to keep the inside greenhouse against destructive effect of climate night freeze. Specific heat capacity and speed of airflow at a greater temperature than the outside one were used as manipulated variables not simultaneously. First, a dynamic model was analytically deduced involving mentioned input variables along with the temperature inside the greenhouse as the output variable. The validation procedure was based on the input thermal power step response of the system and thermal behavior in steady state. A factorial design was implemented to determine other parameters generated by the inclusion of the inflow speed variable. This result was the starting point for simulating assessment tests of performance controller obtained in scenarios where the outside temperature in the greenhouse was configured to represent two situations: outside environmental temperature at the freezing point and temperature behavior during the course of a climate night freeze by radiation. Such simulated situations showed that the controller kept the system without risk of frost damage.
Key words: Discrete time controller; Regulating temperature; Greenhouse modeling; Freeze; Thermal power; Inflow speed.
1. INTRODUCCIÓN
Las heladas climáticas por radiación que ocurren en Boyacá y Cundinamarca, afectan los cultivos de los departamentos, entre otros: papa, hortalizas, flores y pasturas, produciendo pérdidas devastadoras a los agricultores. Los efectos negativos de este fenómeno climático, están bien documentados [1-4]. Cualquier cultivo en la región del altiplano Cundiboyacense, por encima de los 2000 msnm, es víctima potencial de las heladas. Existen dos tipos de heladas climáticas: heladas por radiación y heladas advectivas [5-8]. Las heladas advectivas ocurren cuando masas de aire frio (en el peor de los casos, la temperatura del aire es igual o menor al punto de congelación del agua) interactúan con la atmósfera circundante en un cultivo particular [7, 9-11]. Cuando el frío invade las células vegetales, el agua congelada rompe las paredes celulares aniquilando la planta [12]. Las heladas por radiación ocurren en cultivos que pierden calor por la fuga de energía térmica debido a la radiación en forma de ondas electromagnéticas que escapan al espacio desde el suelo [13].
En el altiplano Cundiboyacense, durante los meses en que hay cielos despejados la mayor parte del tiempo, la temperatura en el día alcanza los máximos promedios del año y los mínimos en la noche, cerca del amanecer [14, 15]. Por lo general, desde mediados de diciembre a finales de marzo es que tiene ocurrencia el fenómeno de heladas climáticas nocturnas. La razón de cambio de la temperatura respecto al tiempo presenta los máximos negativos en el intervalo de 6:00 p.m. hasta las 6:00 a.m. Los cultivos a cielo abierto, en el curso de las 24 horas, experimentan por esta razón, la máxima variación de temperatura.
Una búsqueda de fuentes bibliográficas y evidencia experimental ha demostrado que el uso de invernaderos para la producción agrícola, permite controlar las principales variables ambientales que influyen en las condiciones óptimas para asegurar el máximo crecimiento de las plantas con la mejor calidad [16-18]. Idealmente, dentro de un invernadero hay un sistema cerrado aislado del exterior. Como primer paso, se ejecutaron diseños experimentales para validar un modelo dinámico lineal, cuyos resultados fueron divulgados en el II 2013 Congreso Internacional de Ingeniería Mecatrónica y Automatización [19]. El año inmediatamente anterior, en el III 2014 Congreso Internacional de Ingeniería Mecatrónica y Automatización, se presentó una ponencia que extendió los resultados de la investigación hasta la propuesta de un controlador en tiempo discreto para regular la temperatura dentro del invernadero, ampliando el modelo dinámico mediante la inclusión de una segunda variable de entrada [20].
Este documento añade al trabajo de la última ponencia, la evaluación del desempeño de los controladores para regular la temperatura en condiciones que simulan las condiciones climáticas que afectan el invernadero en el lapso de tiempo de 6:00 p.m. hasta las 6:00 a.m., cuando tiene ocurrencia la caída de temperatura más crítica. El proceso de diseño y simulación se apoyó en el programa MATLAB© y su herramienta SIMULINK©, a partir de expresiones discretizadas [21], con el método de Euler y otros fundamentos teóricos [22, 23].
Los controladores resultantes fueron evaluados mediante simulación. En primer lugar se realizaron pruebas asumiendo temperaturas externas de 0°C constantes durante 1 hora. Posteriormente, se simuló una variación de temperatura durante 12 horas, con mínimo de -3°C y máxima de 12°C.
2. METODOLOGÍA
2.1 Expresiones analíticas para el modelamiento dinámico
Cómo se registra en el documento [19] se pueden asumir condiciones para obtener una ecuación diferencial lineal ordinaria simplificada para describir el comportamiento de la temperatura dentro del invernadero, siendo la potencia térmica P, la función de excitación:
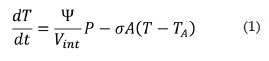
Donde:
T: Temperatura dentro del invernadero (°C).
t: Tiempo (s)
P: Potencia térmica introducida por una fuente de flujo calórico (W).
Ta: Temperatura del ambiente externo (°C).
Ψ: Coeficiente de potencia térmica específica a: 
σ: Conductividad térmica superficial de la cobertura (m-2 s-1).
A: Área de la cobertura del invernadero (m2).
Vint: Volumen interior del invernadero (m3 ).
La ecuación (1) funciona bien si no hay intercambio de masa de aire entre el invernadero y el exterior. Este no es el caso en una operación real. Es necesario incluir otras variables y parámetros para tener esto en cuenta.
En la figura 1, pueden verse esos parámetros:
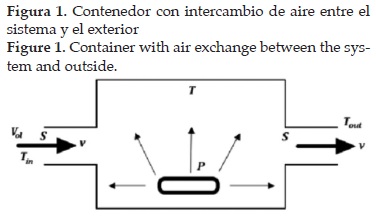
Tin : Temperatura del aire al ingresar (°C)
cp: Calor específico del aire  .
.
ρ: Densidad del aire 
S, representa el área de la sección transversal del conducto de entrada y de salida, v es la velocidad del flujo de aire, tanto a la entrada como a la salida (No hay acumulación de masa). Tout, es la temperatura del aire de salida. Si al interior del contenedor se establece convección forzada mediante la mezcla constante de aire gracias a un ventilador, la temperatura interna puede considerarse homogénea: Tout=T, lo que conduce a:
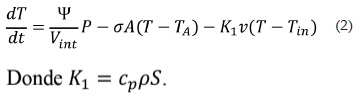
Un caso particular se presenta cuando Tin=TA, que es cuando el aire de entrada es tomado directamente del exterior. De la ecuación (2), se obtiene:

Los parámetros Ψ y σ, pueden obtenerse aplicando la metodología mencionada en [19]. Posteriormente, se obtiene K1 a partir de la ecuación (3). En condiciones de estado estable con P=P0 y v=v0, la temperatura dentro del invernadero, alcanzará eventualmente un valor en régimen permanente Tss . K1 se puede calcular con:

Las ecuaciones diferenciales (2) y (3), no son lineales pero aplicando las series de Taylor, es posible obtener un modelo lineal aproximado, válido alrededor de (Tss,P0,v0 ) [22]. Sin embargo, para esta investigación se trabajó con los modelos dados por las ecuaciones (2) y (3) para extender el rango de aplicación del controlador.
2.2 Pruebas experimentales
Para el sistema estudiado, la variable de respuesta es la temperatura dentro del invernadero T, y los factores de entrada son: La potencia térmica suministrada por la fuente de flujo calórico P y la velocidad del flujo de aire que ingresa al contenedor. Se construyó un invernadero a escala para realizar las pruebas en el laboratorio (figura 2).
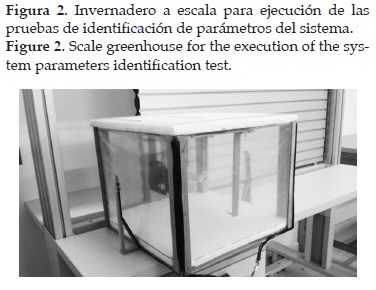
Para obtener una temperatura homogénea dentro del invernadero, se instaló un ventilador para mezclar el aire internamente. El elemento calefactor fue una resistencia de 20W. La potencia térmica disipada se reguló mediante un circuito de control con una tarjeta Arduino UNO conectada a una interfaz de potencia y aplicando una modulación de ancho de pulso (PWM) cuyo ciclo de trabajo determinaba la potencia media calórica transferida. El caudal de aire de entrada se inyectó con una sonda conectada al suministro de aire de un banco neumático FESTO©. La medición del flujo se hizo con un medidor de flujo del mismo fabricante.
El experimento consistió en la aplicación de varios niveles de potencia térmica conocida y con varios tratamientos de caudal de aire. En cada corrida experimental, se tomaron 4 mediciones. A partir de la ecuación (3), diversas medidas en régimen permanente, proporcionan datos para hallar la media aritmética en cada tratamiento. Cada tratamiento consiste de un valor específico de potencia térmica y de velocidad de flujo como entradas de señal del sistema. Finalmente, con la ecuación (4), sustituyendo por los valores utilizados en cada tratamiento de P0 y v0 y de todos los parámetros ya conocidos, los resultados en cada tratamiento serán valores normalmente distribuidos con baja dispersión. El promedio de esos valores corresponderá a K1.
Con todos los parámetros determinados, es posible hacer la simulación del sistema y compararla con los datos reales obtenidos. Un factor a considerar es la constante de tiempo del sensor que es una característica dinámica del transductor. Esto debido a los estados transitorios de las señales en forma de escalón o paso, tanto de potencia térmica como de velocidad de flujo. Otro factor es el ruido introducido en los datos tomados por el sensor.
2.3 Discretización
La aproximación discreta a la definición de la derivada de la temperatura respecto al tiempo es:

Donde T[k] es el valor instantáneo de la temperatura muestreada. T[k+1] es la temperatura en el siguiente instante de muestreo y Ts es el periodo de muestreo con el que trabaja el sistema de adquisición de datos. A medida que Ts se hace más pequeño, la aproximación de la ecuación (5) es más exacta. Teniendo en cuenta que las otras variables también son muestreadas y combinando con la ecuación (2), el cómputo del próximo valor de temperatura, Ts segundos después, está dado por:
2.4 Diseño del controlador
El diseño del controlador se basó en el método propuesto por Astrom y Häglund [23] para determinar su función de transferencia. A partir de la ecuación (5) aplicándola en el dominio del tiempo para hallar las salidas paralelas: proporcional Cprop, integral Cint y derivativo Cder, en forma discreta, se obtiene:
Donde [k-1] representa la muestra inmediatamente anterior de la variable que acompaña. Tsp es el valor de consigna para la temperatura dentro del invernadero. Kp, Ki y Kd son las constantes proporcional, integral y derivativa respectivamente.
Al elemento calefactor se le hizo disipar hasta 20W de potencia térmica y el caudal máximo de aire inyectado fue de 2.5x10-4 (m3/s). Las estrategias de control fueron aplicadas sobre el contenedor mostrado en la figura 2.
En primer lugar, regulando potencia térmica disipada por elemento calefactor y luego con la regulación de velocidad de flujo que ingresa. En cada caso, mientras se manipulaba una entrada, la otra se mantuvo nula.
3. RESULTADOS Y DISCUSIÓN
Como primer paso, se realizó el experimento expuesto en [19] para definir los parámetros del sistema cuyos resultados se organizan en la tabla 1.
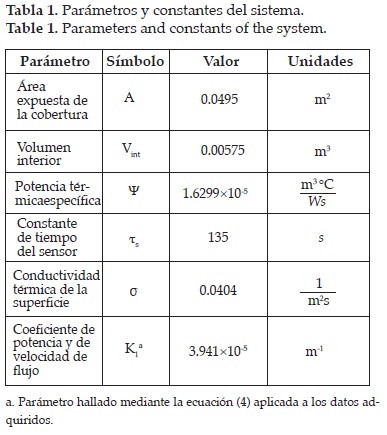
En la figura 3, puede verse el comportamiento de la temperatura en el interior del invernadero mientras se ejecutaba el experimento para determinar los parámetros listados en la tabla 1. De igual forma, se incluye la línea de tendencia suministrada por el modelo deducido para simulación:
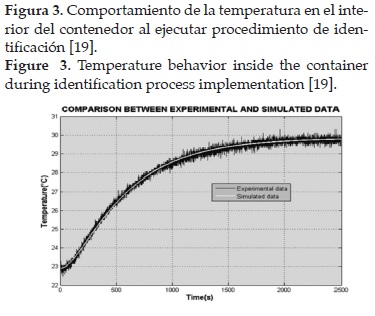
En la figura 3 los datos experimentales tienen ruido incorporado (línea oscura) pero la media ponderada sigue la tendencia que se ajusta bien al comportamiento del sistema simulado (línea clara).
El procedimiento de identificación se basa en el modelo de transferencia térmica sin intercambio de masa entre el invernadero y el exterior. La ecuación diferencial particular que describe el fenómeno es:

El sensor registra una temperatura instantánea Tsens, que es función de la temperatura verdadera del interior, porque introduce una respuesta dinámica de primer orden dada por:

Las ecuaciones (10) y (11) se mantienen separadas para mantener diferenciados dos bloques como sistemas conectados en serie, donde el primero representa la temperatura real del interior y el segundo es la respuesta del sensor.
3.1 Discretización del sistema
Seleccionando un periodo de muestreo de una centésima parte o menos de la menor de las dos constantes de tiempo del sistema (del sensor y del invernadero) se llegó a Ts=0.5s. Sustituyendo todos los valores de los parámetros de la tabla 1 en la ecuación (6) se obtuvo:

La ecuación (12) se utilizó para calcular la temperatura simulada mediante la incorporación de un código de programación en los bloques representativos del sistema. La herramienta para implementar la simulación fue Simulink© de Matlab®, principalmente el bloque de función definida por el usuario. La figura 3, muestra una comparación entre las respuestas paso del sistema real sometido a prueba experimental y la simulación aplicada mediante bloques discretos en Simulink©.
3.2 Ajuste del controlador
En la simulación se realizaron dos etapas: prueba de controlador manipulando potencia térmica como variable de entrada y luego, manipulando velocidad de flujo de aire entrante.
En la primera etapa, sin intercambio de masa, el sistema tiene un comportamiento lineal. El elemento calefactor operó hasta un rango de 20W. Las condiciones que se asumieron para simulación: temperatura inicial 0°C, valor de consigna Tsp=5°C y con una temperatura ambiente externa constante en el punto de congelación. La respuesta se analizó en dos situaciones: control en lazo abierto y control PID con las constantes del controlador siguientes:
La expresión discreta de la salida del controlador:

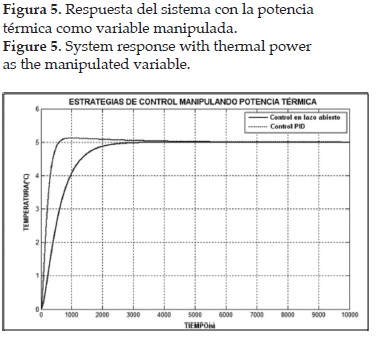
El diagrama de bloques que representa el sistema incluyendo el controlador se muestra en la figura 4. La temperatura de referencia Tp, se estableció como una entrada pasó de 0 a 5°C. La respuesta del controlador en las dos situaciones previamente descritas, se observa en la figura 5.
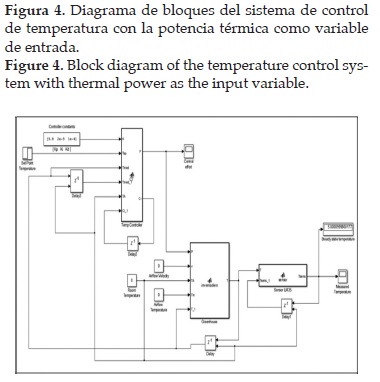
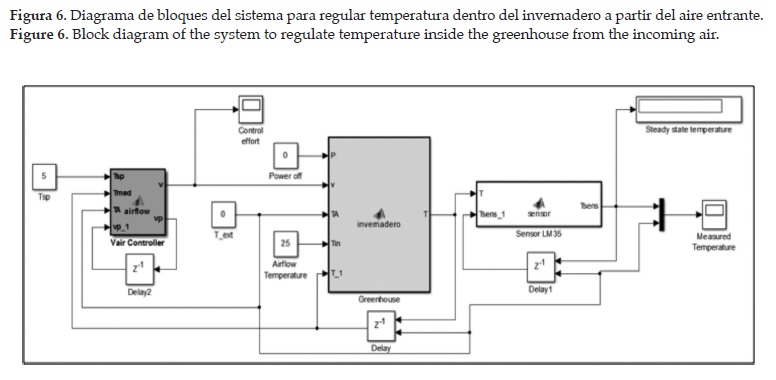
El bloque "TempController" tiene embebido el código para implementar un controlador PID a partir de las ecuaciones (7)-(9) y (13). El bloque "Invernadero" contiene un script para simular el comportamiento de la temperatura al interior del invernadero a partir de la ecuación en diferencias (12). El tiempo de simulación se acerca a las 3 horas.
En la segunda etapa, se utiliza la velocidad de flujo de aire entrante como variable de entrada, mientras la potencia térmica se anula al apagar el calefactor. La temperatura del aire de entrada Tin, es un factor de gran influencia pues la temperatura al interior dependerá directamente de este parámetro. Las condiciones establecidas para la simulación fueron: Tin=25°C, la temperatura externa constante en el punto de congelación, la máxima velocidad de flujo entrante v=80 (m/s). La relación dinámica entre T y v, no es lineal pero no se diseñó controlador a partir de linealización sino que se implementó un algoritmo para una acción de control ejecutada tomando en cuenta las características no lineales del sistema. El algoritmo mencionado se basa en las siguientes expresiones:
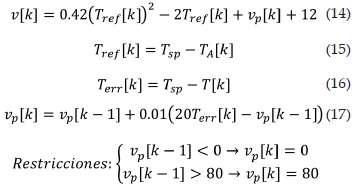
Donde vp [k], es la velocidad de flujo instantánea aplicada como variable manipulada para regular la temperatura en el interior del invernadero.
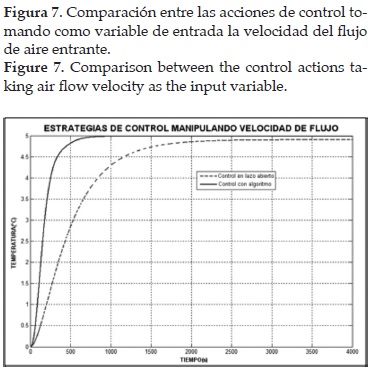
La evaluación de estrategias de control se realizó con el sistema que se muestra en la figura 6 y en dos situaciones: con control en lazo abierto y con algoritmo controlador. El bloque "Vair Controller" es una función definida por usuario cuyo código embebido aplica acciones de control basadas en las ecuaciones 14-17.
3.3 Desempeño de controladores en condiciones simuladas de heladas nocturnas
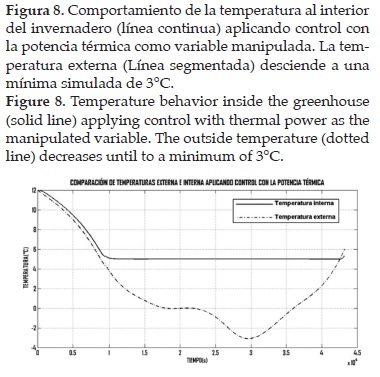
Las heladas climáticas tienen ocurrencia en la noche y la temperatura exterior varía desde la caída del sol hasta el amanecer del día siguiente. Para representar la variación de la temperatura exterior en un evento de helada, se recurrió a la simulación del comportamiento de la temperatura como una función variable en el tiempo teniendo en cuenta un descenso desde los 12°C hasta -3°C. La temperatura mínima simulada se hace ocurrir en horas de la madrugada entre las 2:00 a.m. y las 4:00 a.m. El último intervalo, representa un ascenso de la temperatura debido a la radiación solar que se incrementa paulatinamente al acercarse el amanecer a las 6:00 am.
Esta variación de temperatura se aplicó a la entrada del bloque que representa la dinámica del invernadero. Tal entrada sustituye a la constante que representaba la temperatura externa en 0°C. Con esta incorporación, se evaluó la respuesta de las dos estrategias de control: tomando como variable manipulada la potencia térmica y en segundo lugar, el caudal del aire caliente de entrada.
La figura 8, ilustra el comportamiento de las temperaturas interna y externa al invernadero cuando se utiliza un controlador PID digitalizado. En la gráfica, la abscisa al origen representa el instante al iniciar la simulación de condiciones de helada a las 6:00 p.m. Las unidades de tiempo están en segundos y las 12 horas abarcan 43200 segundos hasta el amanecer a las 6:00 a.m. del día siguiente.
Lafigura 9 muestra el comportamiento de la temperatura interna del invernadero aplicando control mediante el algoritmo previamente descrito. Las condiciones de temperatura externa tienen el mismo comportamiento que para el primer controlador.

4. CONCLUSIONES
- La ecuación en diferencias (6), es una buena aproximación al comportamiento del sistema obtenida a partir de la curva de respuesta (figura 3). Los resultados de la simulación tienen un buen grado de ajuste con los datos experimentales. De hecho, la curva de tendencia se puede extraer mediante alguna técnica de filtrado para reducir el ruido. En el caso particular de este trabajo, se aplicó la media móvil ponderada. Debido a limitaciones de espacio en este documento, sólo se mostró uno de los resultados. Sin embargo, se dispuso de otra buena cantidad de datos que describen el comportamiento del sistema en diferentes condiciones de operación. En todos ellos se mantuvo una misma tendencia y el tratamiento mostrado es una situación representativa de todas las mediciones.
- El resultado de la simulación demuestra que las dos variables manipuladas permiten generar acciones de control eficientes para mantener la temperatura interna del invernadero dentro de límites que previenen los daños por heladas. Los resultados apoyan la hipótesis: con el control de cualquiera de las dos variables de entrada tomadas, se mantuvo el comportamiento de la temperatura cerca al valor de consigna. Ante un cambio en el valor de referencia, el control permitió alcanzar el nuevo punto de operación en un cuarto del tiempo que el que se obtuvo con la aplicación de control en lazo abierto.
- Debido a la relación no lineal entre la temperatura interior y la velocidad del flujo de entrada, la respuesta ante la estrategia de control mantuvo un error en estado estable mayor que el correspondiente al control a partir de la manipulación de la potencia térmica. Sin embargo, en régimen permanente, el error en estado estable está dentro de rangos admisibles que permiten despreciarlo. La ocurrencia de tal diferencia ocurre por la dispersión entre la función de aproximación (17) y la ecuación (12) contenida en el respectivo bloque (figuras 5 y 6).
- Con ambas estrategias de control, la simulación demostró que se puede mantener la temperatura del invernadero por encima de un mínimo que se seleccionó con criterios claros. En primer lugar, que dicho valor de consigna se mantuviera por encima del punto de congelación. De otro lado, ese valor debe ser posible alcanzarlo con la manipulación de la variable de entrada dentro de los límites que se puede obtener. Si el valor está muy cerca del punto de congelación, se corre el riesgo de rompimiento celular de las células vegetales, pero si se selecciona muy alto, será necesario suministrar mayor energía de parte de la fuente de flujo calórico, lo que puede implicar mayor costo de operación.
- Con cualquiera de las dos estrategias aplicadas se logró alcanzar el valor de consigna desde una condición inicial equivalente al punto de congelación. Tal situación, no se espera en realidad porque el sistema operará en horas nocturnas desde el inicio del anochecer alrededor de las 6:00 p.m. A tales horas, la temperatura ambiente nunca ha sido cercana al punto de congelación en ninguna de las áreas cercanas a la ubicación en que se realizaron las pruebas descritas en este documento. Como se aprecia en las figuras 8 y 9, se puede ver que la acción de control en ambos casos sólo se aplica cuando se desciende por debajo del valor de consigna escogido. Como el desempeño simulando condiciones iniciales de temperatura iguales al punto de congelación, ha demostrado buen comportamiento llevando el sistema a la temperatura de consigna, se interpreta que es menor el esfuerzo de control en un escenario representado por la temperatura externa durante las 12 horas de tránsito nocturno.
REFERENCIAS
[1] Banco de Occidente, "Altiplanos de Colombia - Colección Ecológica del Banco". [En línea]. Disponible en: http://www.imeditores.com/banocc/altiplanos/cap3.htm. [Accedido: 15-ene-2013] [ Links ].
[2] C. Aristizábal Arango, "Brotes especulativos, el riesgo de la ola de calor", El Colombiano, Medellín, 2013. [ Links ]
[3] T. E. Farlie y A. Ortega, "Efecto de la Presencia de Heladas Simuladas en Diferentes Estados Fenológicos y su Impacto en el Rendimiento de la Papa CV Ccompis: Estudio Preliminar.", Rev. Latinoam. Papa, 7, 86-93, 1994. [ Links ]
[4] "Heladas en el altiplano cundiboyacense - eltiempo. com", eltiempo.com. [En línea]. Disponible en: http://www.eltiempo.com/vida-de-hoy/educacion/heladas-en-el-altiplano-cundiboyac_12362715-4. [Accedido: 14-ene-2013] [ Links ].
[5] D.-H. Park, B.-J. Kang, K.-R. Cho, C.-S. Shin, S.-E. Cho, J.-W. Park, y W.-M. Yang, "A Study on Greenhouse Automatic Control System Based on Wireless Sensor Network", Wirel. Pers. Commun., 56 (1), 117-130, 2011. [ Links ]
[6] A. Alpi y F. Tognoni, Cultivo en invernadero. Mundi-Prensa Libros, 1991. [ Links ]
[7] K. B. Perry, "Basics of Frost and Freeze Protection for Horticultural Crops", HortTechnology, 8 (1), 10-15, 1998. [ Links ]
[8] D. S. Wratt, A. Tait, G. Griffiths, P. Espie, M. Jessen, J. Keys, M. Ladd, D. Lew, W. Lowther, N. Mitchell, J. Morton, J. Reid, S. Reid, A. Richardson, J. Sansom, y U. Shankar, "Climate for crops: integrating climate data with information about soils and crop requirements to reduce risks in agricultural decision-making", Meteorol. Appl., 13 (4), 305-315, 2006. [ Links ]
[9] F. C. S., Francisco Elias Castillo, Agrometeorología. Mundi-Prensa Libros, 2001. [ Links ]
[10] A. Maqbool, S. Shafiq, y L. Lake, "Radiant frost tolerance in pulse crops-a review", Euphytica, 172 (1), 1-12, 2010. [ Links ]
[11] "Revista Latinoamericana de la Papa - Google Libros". [En línea]. Disponible en: http://books.google.com.co/books?id=9VminGvwTPsC&pg=PA88&dq=efecto+heladas+papa&hl=es&sa=X&ei=suJfT7m4K5P4gAethqmbCA&ved=0CDcQuwUwAQ#v=onepage&q=heladas&f=false. [Accedido: 14-mar-2012] [ Links ].
[12] M. J. Burke, L. V. Gusta, H. A. Quamme, C. J. Weiser, y P. H. Li, "Freezing and Injury in Plants", Annu. Rev. Plant Physiol., 27 (1), 507-528, 1976. [ Links ]
[13] F. P. Incropera y D. P. De Witt, Fundamentals of heat and mass transfer, 2nd edition. John Wiley and Sons Inc. New York, NY, 1985. [ Links ]
[14] J. D. Pabón-Caicedo, J. A. Eslava-Ramírez, y R. E. Gómez-Torres, "Generalidades de la distribución espacial y temporal de la temperatura del aire y de la precipitación en Colombia", Meteorol. Colomb., 4, 47-59, 2001. [ Links ]
[15] J. J. V. Corredor, C. A. C. Camargo, y E. F. M. Guerreo, "Efectos de los fenómenos macroclimáticos (El Niño y La Niña) sobre diferentes variables, climatólogicas en Boyacá", Vestig. Ire, 1 (1), 2008. [ Links ]
[16] N. Castilla, J. Hernandez, y A. F. Abou-Hadid, "Strategic Crop and Greenhouse Management in Mild Winter Climate Areas", Int. Soc. Hortic. Sci. [ Links ]
[17] V. P. Sethi, K. Sumathy, C. Lee, y D. S. Pal, "Thermal modeling aspects of solar greenhouse microclimate control: A review on heating technologies", Sol. Energy, 96, 56-82, 2013. [ Links ]
[18] "greenhouse", Encyclopedia Britannica. [En linea]. Disponible en: http://global.britannica.com/EBchecked/topic/245223/greenhouse. [Accedido: 03-dic-2013] [ Links ].
[19] O. A. Bellon Hernandez, "Deduction and validation of a dynamic model of heat transfer in scale greenhouse", en 2013 II International Congress of Engineering Mechatronics and Automation (CIIMA), 2013, pp. 1-6. [ Links ]
[20] H. Amador Soto, E. Rodriguez Lozano, y O. Bellon Hernandez, "Design and simulation of a discrete time controller for regulating temperature in a scale greenhouse", en 2014 III International Congress of Engineering Mechatronics and Automation (CIIMA), Cartagena de Indias, Colombia, 2014, pp. 1-5. [ Links ]
[21] M. A. Gray, Introduction to the Simulation of Dynamics Using Simulink. CRC Press, 2010. [ Links ]
[22] K. Ogata, Modern Control Engineering. Prentice Hall, 2010. [ Links ]
[23] K. J. Âstrom y T. Hagglund, "Revisiting the Ziegler-Nichols step response method for PID control", J. Process Control, 14 (6), 635-650, 2004. [ Links ]


{kind=link}