











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. INTRODUCCIÓN
En Colombia las amputaciones totales o parciales de un miembro o una extremidad no solo se dan por enfermedades, sino por accidentes y por el conflicto armado. La Asociación Colombiana de Medicina Física y Rehabilitación estima que la incidencia de amputación en el país se da de 200 a 300 personas por cada cien mil habitantes 1. Esta cifra tiende a incrementarse en población con factores de riesgo como la diabetes, problemas en los sistemas vasculares y por las enfermedades crónicas. De acuerdo con la Asociación de Medicina Física, las amputaciones quirúrgicas se realizan con dos objetivos: el primero es eliminar o contrarrestar la causa que la originó, para disminuir riesgos y preservar la vida. El segundo es permitir una adecuada rehabilitación posterior, para lograr la mejor adaptación de una prótesis y restablecer las funciones motoras asociadas a la mano lo mejor posible 2. Si bien, el uso de las prótesis es consecuencia de los inconvenientes mencionados anteriormente 3, el desarrollo de estas ha estado estrechamente vinculado con el desarrollo de la robótica asistencial constituyendo hoy día una de las aplicaciones a resaltar en Bioingeniería. Aunque la historia de estos dispositivos comienza hace más de 30 años, su evolución no ha sido la que inicialmente pudo preverse. Hay diversas razones que justifican este estancamiento, por una parte, la poca funcionalidad que se obtiene respecto al uso de brazos y manos sanos, debido no tan sólo a las limitaciones mecánicas o de estrategias de manipulación, sino también a las posibilidades del usuario a transmitir las órdenes adecuadas para producir los movimientos deseados 4.
Una de las formas más utilizadas para manipular las prótesis implantadas ya en los pacientes, se basa en utilizar las señales mioeléctricas del usuario generadas en los músculos para activar las prótesis, sin embargo si el paciente tiene limitaciones presentes, en sus músculos remanentes y no los puede contraer fácilmente, las señales electromiográficas (EMG) del usuario no pueden ser captadas y no es posible la manipulación de la prótesis sin métodos no invasivos 5. También se presentan otros inconvenientes como la confusión en la correcta identificación de la intención de movimiento del usuario, y en la degradación de la señal muscular en pacientes cuya lesión ocurrió hace mucho tiempo, ya que el paciente pierde vías de comunicación al sistema nervioso por lo que desconoce el estado de su músculo y debe aprender a contraerlo a voluntad, lo cual no es fácil 6.
Igualmente, en los últimos años, se han invertido muchos esfuerzos en el desarrollo de sistemas biónicos híbridos capaces de unir, vía interfaces naturales, el sistema nervioso humano con prótesis, o incluso máquinas robóticas externas, con el principal objetivo de recuperar las funciones motoras y sensoriales de pacientes con lesiones: en la médula espinal, en el cerebro, a causa de enfermedades degenerativas o por accidentes que han llevado a los pacientes a sufrir amputaciones 7.
Este proyecto de investigación busca una técnica novedosa para la manipulación de una prótesis de mano virtual robotizada utilizando una interfaz natural basada en una BCI (Brain Computer Interface). Manipular este tipo de prótesis partiendo de señales cerebrales se hace importante cuando se entiende que los desarrollos en esta área son mínimos en comparación con otros estudios en la parte médica y que puede ser una solución a los inconvenientes descritos anteriormente, referentes al movimiento natural de las manos 8.
2. TEORIA
2.1 Prótesis de Mano
Actualmente se presentan diversos tipos de prótesis para extremidades superiores, y sus tipos varían ajustándose a las necesidades básicas de los pacientes que las usan. Algunas prótesis parecen muy reales, otras tienen una tecnología tan avanzada que pueden considerarse como robots. Algunas prótesis no se mueven nada en absoluto (prótesis estéticas), otras pueden ajustarse solo en posiciones específicas y otras son mecánicas y están controladas por músculos, cables y guayas 9. Sin embargo en todos los tipos de prótesis mencionados, el mecanismo de control ha sido una limitante en la funcionalidad de dichas prótesis.
En el campo de las prótesis robotizadas, las principales investigaciones, desarrollos y aplicaciones basados en la robótica asistencial y en el desarrollo de estas prótesis de miembro superior, se han realizado en países como Estados Unidos, Japón, Francia, Alemania y Europa en general 10. El alto grado de precisión de esta tecnología, ha despertado un enorme interés dentro del ámbito médico e ingenieril. Entre estas prótesis de mano robóticas, las más conocidas son: Michelangelo(r), I - Limb Ultra, The Dextrus Hand, Be Bionic, Handie, entre otras 11-13.
En cuanto a su operación, algunas de las formas más utilizadas para manipular la prótesis implantada ya en los pacientes es: a través de una aplicación en un dispositivo móvil y la otra se basa en las señales electromiográficas (EMG) del usuario. La primera técnica presenta la desventaja de la manipulación del dispositivo móvil por el paciente con su mano sana, situación que restringe notoriamente la manipulación de los objetos que se encuentran en su alrededor. La segunda técnica se basa en utilizar las señales mioeléctricas del usuario generadas en los músculos para activar las prótesis 5, sin embargo si el usuario presenta limitaciones en sus músculos remanentes y no los puede mover sin gran esfuerzo, las señales bioeléctricas asociadas del usuario no pueden ser registradas y no es posible operar la prótesis con éxito. Adicionalmente, para el uso de esta técnica, se debe tener en cuenta que el paciente puede perder varias de las vías de comunicación al sistema nervioso debido a la amputación por lo que no se conoce con exactitud el estado de su músculo y debe pasar por un largo proceso para aprender a contraerlo voluntariamente.
De igual manera, para países en desarrollo es más difícil adquirir y aplicar esta tecnología principalmente por su costo. Por ejemplo la prótesis de mano BeBionic manipulada a través de señales electro miograficas y/o por una aplicación móvil 13 cuesta aproximadamente 10.000 dólares, y esto sin tener en cuenta el costo del tratamiento de rehabilitación del paciente que ha sufrido la lesión o amputación. En la figura 1 se muestra la prótesis de mano BeBionic.

Las situaciones anteriores han llevado a recientes investigaciones en la manipulación de las prótesis utilizando interfaces cerebro - computador. Las últimas investigaciones (altamente costosas) que se han realizado en este campo, utilizan interfaces BCI invasivas, es decir, que implican procedimientos quirúrgicos dentro de la cabeza del paciente para la conexión de los sensores que registran las señales bioeléctricas producidas por el cerebro humano 14. Uno de los proyectos más destacado en esta área es el llamado Life Hand II, llevado a cabo por científicos europeos (Italia, Suiza y Holanda) para procesos de investigación 15. Esta prótesis de mano robotizada es capaz de reproducir el sentido del tacto, ya que conecta los nervios del paciente a la mano, con esta prótesis es posible controlar la fuerza realizada en el agarre de objetos y es manipulada con la interpretación de señales cerebrales.
Actualmente, también se están utilizando interfaces BCI, que hacen uso de sensores fisiológicos no invasivos, usan una serie de electrodos para leer señales eléctricas en el cuero cabelludo causadas por la actividad cerebral y este tipo de BCI no invasiva, se puede conseguir como una opción viable para el control de dispositivos y aplicaciones mediante la interpretación de las señales cerebrales; que son relativamente más accesible que sus contrapartes médicas 7,16.
2.2 Señales Encefalograficas (EEG)
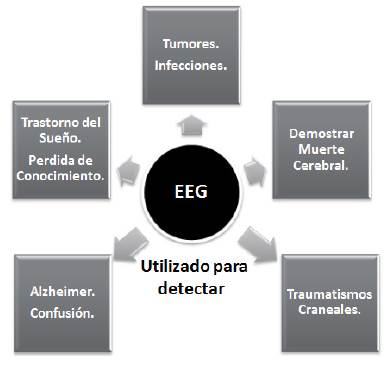
Las señales eléctricas producidas por el cerebro son generadas por la diferencia de potencial en la membrana celular de las neuronas y este proceso es la base del funcionamiento de nuestro sistema nervioso. El registro de estas bioseñales es lo que se conoce como Electroencefalograma (EEG) y los ritmos de la actividad neuronal constituyen un lenguaje de comunicación propio de las neuronas. A medida que han avanzado los algoritmos de procesamiento de señales que ayudan a comprender el significado de las señales EEG, se han generado aplicaciones clínicas y tecnológicas que hasta hace algunos años pertenecían al área de la ciencia ficción 17. En la figura 2 se muestran algunas alteraciones físicas o mentales que pueden presentarse en pacientes y que son diagnosticadas gracias a la interpretación del electroencefalograma.
El registro de las señales EEG también es la base de las denominadas BCI pertenecientes al grupo de las interfaces naturales.
2.3 Interfaz Cerebro - Computador
Una BCI o interfaz cerebro computador pertenece al grupo de interfaces naturales, estas se utilizan como medio de interacción (HMI), debido a que permiten la manipulación de aplicaciones o dispositivos mediante el registro e interpretación de las señales electroencefalográficas (EEG) sin la dependencia de dispositivos mecánicos. El uso de interfaces naturales por personas con discapacidad, es una novedosa aplicación, ya que con estas y con el uso de prótesis robóticas, el usuario puede realizar los movimientos naturales que ejecutaba antes de perder su extremidad. A continuación se presenta el casco Emotiv(r).
2.4 Casco basado en la tecnología Emotiv(r)
Este casco cuenta con una BCI y con catorce electrodos cerebrales no invasivos más dos referencias (ubicados según el estándar 10-20), que permiten el registro de las señales encefalográficas, específicamente los ritmos: Delta (0.5 - Hz), Theta (4 - 8 Hz), Alpha (8 - 14 Hz), y Beta (14 - 26 Hz). Posteriormente estas señales son enviadas al computador a través de Bluetooth. La figura 3 muestra el casco Emotiv(r) 16.

El casco Emotiv(r) Neuroheadset cuenta con una autonomía de 12 horas y la aplicación del fabricante Test BenchTM que permite visualizar las señales EEG.
Ahora, el objetivo principal de este proyecto de investigación, es la manipulación de una prótesis virtual de mano utilizando señales EEG capturadas con una BCI de bajo costo, en este caso con el casco Emotiv(r) Neuroheadset, lo cual debería plantear un nuevo paradigma para la manipulación de prótesis de mano, y probablemente se solucionen los inconvenientes presentados anteriormente.
3. METODOLOGÍA
3.1 Descripción del Sistema
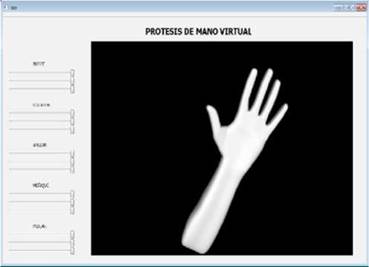
Este proyecto utiliza como plataforma el prototipo de prótesis virtual desarrollado por el grupo de Automática Industrial de la Universidad del Cauca. La aplicación utiliza Qt como framework de interface de usuario (ventana), también hace uso de las librerías de visualización gráfica VTK ampliamente utilizada en aplicaciones médicas. El desarrollo se realizó en lenguaje C++ en la plataforma Visual Studio 2010. La aplicación permite manipular cada una de las articulaciones de una mano virtual antropomórfica, que se puede observar en la figura 4.
3.2 Interfaz de Programación de la Aplicación (API)
Emotiv ofrece un conjunto de suites que permiten la interpretación de las señales EEG y operan con EmoEngine a través de Emotiv API. Estas suites son: ExpressivTM, AffectivTM y CognitivTM. La interpretación de las señales según la suite utilizada es mostrada en el Control Panel Emotiv.

Dentro del panel de control se presentan las diferentes suites. Particularmente la suite CognitiveTM muestra un cubo que puede ser manipulado (mover atrás, adelante, a la izquierda, a la derecha, entre otras) a través de las señales EEG después de una fase de entrenamiento.
3.3 Integración del Sistema
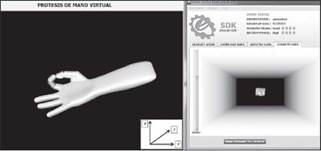
La integración de la prótesis de mano virtual y el casco Emotiv(r) se realizó con la API (específicamente con la librería de enlace dinámico edk.dll) y el conjunto de herramientas del SDK (Software Development Kit), ya que este último provee las clases y funciones en C++ para el manejo de las suites mencionadas precedentemente.
3.4 Manipulación de la Prótesis de Mano Virtual
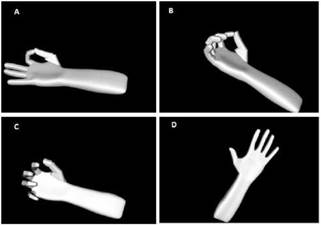
Para la manipulación de la prótesis de mano virtual, se escogió, que esta pueda realizar los agarres: de pinza (tip), cilíndrico (cylindrical grasp) y esférico (spherical grasp), igualmente debe poderse cerrar completamente y abrirse. La manipulación de la mano se hace a través de los pensamientos del usuario y se infiere una intención de movimiento, para esta aplicación se hace uso de la suite CognitiveTM donde el usuario debe pasar y aprobar una etapa de entrenamiento, en la cual imagina diferentes imágenes (relacionadas a la apertura y diferentes grasp con su mano) y sus patrones cerebrales son guardados y asociados a la generación de las diferentes acciones de control para la manipulación de la prótesis en los agarres mencionados anteriormente. En la figura 6 se muestra la disposición de la mano virtual en los diferentes tipos de agarres.
Si el usuario esta relajado (corresponde al entrenamiento en el modo cognitivo a la acción neutral y se recomienda que sea la primera acción entrenada) la prótesis de mano virtual debe estar totalmente abierta, como se observa en la figura 6D. Por ejemplo, si el usuario mueve hacia atrás el cubo (a lo largo del eje z en la interfaz de usuario) que se muestra en la figura 7, después de superar la etapa de entrenamiento, se generará una acción de control que es interpretada por el software, esta indica que la prótesis de mano virtual debe adaptarse para el agarre de pinza fina. Similarmente se generan otras acciones de control para la ejecución de los otros agarres mencionados anteriormente.
En la figura 8, se presenta uno de los usuarios manipulando la prótesis de mano virtual.

3.5 Condiciones de Funcionamiento y Restricciones
Para que el sistema funcione correctamente se deben cumplir las siguientes condiciones:
Todos los electrodos deben estar registrando correctamente las señales EEG (indicadores en verde en el Panel de Control de Emotiv).
Cada usuario debe pasar por la etapa de entrenamiento para realizar los agarres mencionados anteriormente y debe obtener un skill rating mayor al 70%, esta tarea varía según el usuario y puede ser realizada en un tiempo promedio de seis horas.
El usuario debe tener el cabello corto y los felt sensors deben estar humedecidos con el gel conductor.
El casco Emotiv Neuro Headset puede estar alejado del receptor USB como máximo una distancia de un metro para evitar la pérdida de la señal.
La aplicación está diseñada solo para trabajar con un solo casco Emotiv Neuro Headset al tiempo, ya que solo admite cargar el perfil de entrenamiento de un usuario a la vez.
El número de agarres que se puede realizar con la prótesis de mano virtual está restringido a tres y a estos se les suma: mano abierta y completamente cerrada; esta limitación se presenta para evitar falsos positivos.
4. RESULTADOS Y DISCUSIÓN
A continuación se presentan los indicadores de desempeño que permiten establecer la viabilidad de la manipulación de la mano virtual, y así extender estos resultados para predecir y concluir si es posible y en qué condiciones se puede manipular una prótesis robótica de mano real con señales EEG captadas con el casco Emotiv(r) Neuroheadset. En el estudio se realizaron cinco pruebas con cuatro usuarios (pacientes) y se usan como indicadores de desempeño: el porcentaje de éxito en las acciones a realizar (para las primeras cuatro pruebas) y el tiempo promedio por secuencia completada correctamente; para la última prueba se usa como indicador la matriz de contingencia o error 18-20.
4.1 Primera prueba
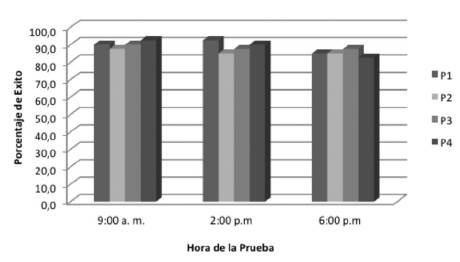
Esta consiste en que cada usuario realice una secuencia que involucra dos acciones de la mano virtual, esta es: cerrar mano y seguidamente abrir mano. Para ello el usuario cuenta con 40 intentos durante cada sesión (para realizar la secuencia 1). En las tablas 1 y 2se muestran los resultados obtenidos durante esta prueba.
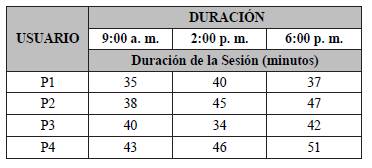
Se aclara que en la tabla 2, no se ha incluido el tiempo de entrenamiento de cada usuario, este es en promedio alrededor de 10h. Estas 10h de entrenamiento, son el resultado de acumular sesiones de entrenamiento con una duración de máxima 15 minutos (se recomienda esta duración en la sesión de entrenamiento para evitar que el usuario pierda fácilmente la concentración). En la figura 9 se resumen los porcentajes de éxito obtenidos por los cuatro usuarios durante esta prueba.
Los resultados de esta prueba son satisfactorios, indicando que cada uno de los usuarios puede manipular la mano virtual con el casco Emotiv, para que esta realice una secuencia sencilla. El mayor porcentaje de acierto durante la prueba fue 92,5% y el menor 82,5%, este último obtenido durante una sesión nocturna.
4.2 Segunda prueba
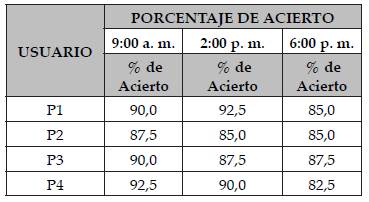
Esta consiste en que cada usuario realice una secuencia que involucra tres acciones de la mano virtual, esta es: cerrar mano, abrir mano y finaliza con el agarre de pinza fina. Para ello el usuario cuenta con 40 intentos durante cada sesión (para realizar la secuencia 2). Se aclara que para realizar cada una de las acciones de la mano virtual, el usuario asocia una imagen (una para cada acción) que es conocida durante la etapa de entrenamiento para grabar el patrón de sus señales EEG, y concentrándose en esta, se presenta el movimiento del cubo 3D y se genera la acción determinada en la mano virtual. En las tablas 3 y 4se muestran los resultados obtenidos durante la segunda prueba.
En la figura 10 se resumen los porcentajes de éxito obtenidos por los cuatro usuarios durante esta prueba.
Los resultados de esta prueba son buenos, los porcentajes de acierto (11 de 12) de los usuarios son mayores o iguales al 70%, como era de esperarse el tiempo promedio por secuencia aumentó con respecto a la prueba anterior, esto debido a que el usuario necesita mayor tiempo de concentración, más la adición de la última acción realizada con la mano. Observando la figura 10, los porcentajes de acierto de los usuarios P1 y P2 disminuyeron en la sesión nocturna, el usuario P2 mencionó que le era difícil concentrarse, por el contrario el usuario P3 manifestó que en la prueba nocturna, le fue más sencillo manipular la mano virtual.
4.3 Tercera prueba
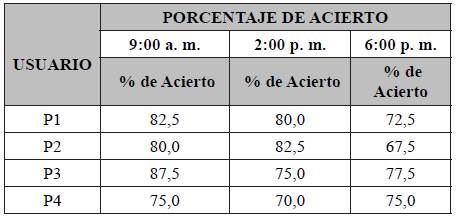
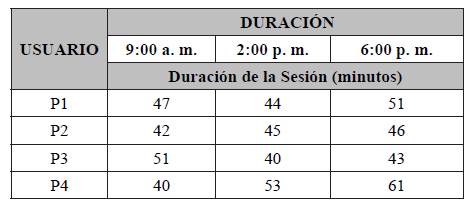
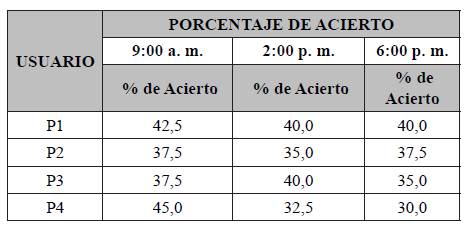
Esta consiste en que cada uno de los usuarios realice una secuencia que involucra cuatro acciones de la mano virtual, más la repetición de la acción abrir mano. La secuencia es: cerrar mano, abrir mano, pinza fina, abrir mano y finaliza con el agarre cilindrico. Para ello el usuario nuevamente cuenta con 40 intentos durante cada sesión (para realizar la secuencia 3). En las tablas 5 y 6se muestran los resultados obtenidos durante la tercera prueba.
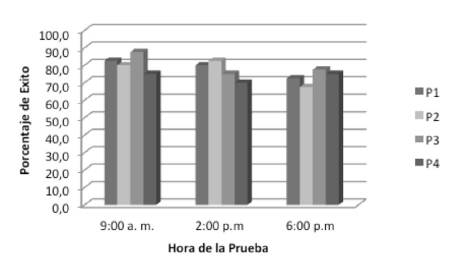
En la figura 11 se resumen los porcentajes de éxito obtenidos por los cuatro usuarios durante la tercera prueba.
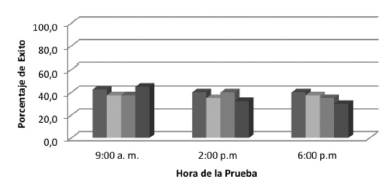
Los resultados de esta prueba muestran que los porcentajes de acierto de los usuarios decrecieron sustancialmente, estos están en el intervalo de 30% a 45%. Indicando que manipular la mano fiablemente con cuatro acciones es muy difícil. Se debe recordar que se está trabajando con señales EEG y una de las posibles causas de esta caída en el porcentaje de acierto, se debe a que el algoritmo que clasifica los patrones cerebrales ya no puede distinguirlos fácilmente, al igual que para el usuario es difícil repetir los mismos patrones cerebrales durante la etapa de entrenamiento y en la ejecución de las acciones que sigue la mano virtual en una secuencia, que ahora se realiza en un tiempo en el intervalo de 16,2s - 23,2s y que implica mayor concentración y fatiga mental. Sin embargo, se presenta una característica a destacar en esta prueba: los mejores resultados obtenidos por los usuarios fueron en la sesión de las 9:00 am; esta situación indica que a los usuarios les fue más fácil concentrarte en esas horas, debido a que la actividad cerebral es más estable gracias al tiempo de descanso durante la noche 21.
4.4 Cuarta prueba
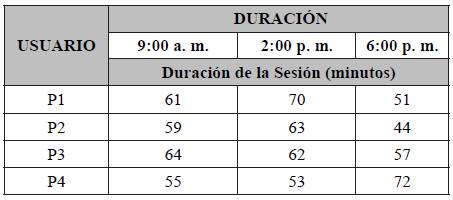
Esta consiste en que cada usuario realice una secuencia más compleja, que involucra cinco acciones de la mano virtual, más la triple repetición de la acción abrir mano. La secuencia es: cerrar mano, abrir mano, pinza fina, abrir mano, agarre cilindrico, abrir mano y finaliza con el agarre esférico. Para ello el usuario cuenta con 40 intentos durante cada sesión (para realizar la secuencia 4). En las tablas 7 y 8se muestran los resultados obtenidos durante la cuarta prueba.

En la figura 12 se resumen los porcentajes de éxito obtenidos por los cuatro usuarios durante la cuarta prueba.
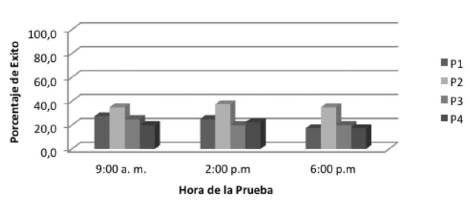
Figura 12 Comparación de los porcentajes de acierto de los usuarios durante la cuarta prueba (secuencia 4).
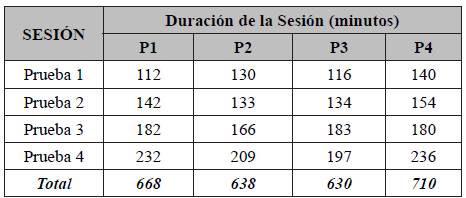
Los resultados obtenidos durante esta prueba muestran que el porcentaje de acierto de los usuarios en la ejecución de la secuencia son muy bajos, y no se puede manipular la mano virtual confiablemente en una secuencia que involucre las cinco acciones de la mano mencionadas anteriormente. Entre los usuarios, se destacó el P2, que aunque no obtuvo porcentajes de éxito representativos, mejoraba su overall skill rating en cada sesión más de entrenamiento, lo que fue muy difícil para los otros usuarios. A medida que las pruebas presentaban una secuencia que involucraba más acciones, las sesiones fueron cada vez más largas con los usuarios y estos manifestaban cansancio físico y mental; incluso el usuario P4 manifestó que sufría de fuertes dolores de cabeza después de cada sesión de entrenamiento y pruebas (a partir de la segunda). En la tabla 9 se resumen los tiempos totales de los usuarios en las pruebas, sin incluir las largas jornadas de entrenamiento.
Aunque las pruebas 1, 2, 3 y 4 presentan información de las que se pueden obtener conclusiones valiosas y pertinentes acerca del desempeño de la manipulación de la mano virtual utilizando el casco Emotiv, se presenta la última prueba donde se quiere analizar (utilizando la matriz de error) cómo el algoritmo de caracterización de patrones cerebrales con EmoEngine clasifica las acciones entrenadas por cada usuario sin que este siga una secuencia preestablecida (o conocida por este).
4.5 Quinta prueba
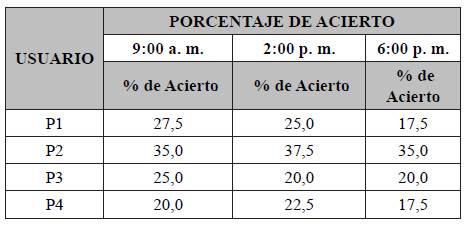
Esta consiste en que cada usuario realice 56 acciones (mano abierta, mano cerrada y los tres agarres mencionados anteriormente) con la mano virtual. La prueba incluye: 20 acciones abrir mano, 15 acciones cerrar mano, 9 agarres de pinza fina, 6 agarres cilindricos y 6 agarres esféricos. En esta prueba el usuario no sabe en qué secuencia se le van a solicitar los agarres. Sin embargo, la persona que dirige la prueba, le presenta al usuario cada una de las imágenes asociadas a las diferentes acciones que puede realizar la mano virtual con la finalidad que el usuario pueda responder al estímulo presentado o a la acción requerida en ese instante. Este último test trata de aproximar la manipulación de la mano en un ambiente en el que el usuario pueda utilizarla, de acuerdo a sus necesidades. En la tabla 10 se muestran las matrices de contingencia (de confusión o de error) para cada usuario durante la quinta prueba; esta fue realizada por todos los usuarios en horas de la mañana.
Los resultados obtenidos en esta prueba serán favorables si las frecuencias relativas en las diagonales de cada matriz tienden a 1 (implica un % de éxito del 100). Ahora, los datos obtenidos en esta prueba, muestran que varias de las acciones que intentan realizar los usuarios son confundidas por el algoritmo privado de clasificación que utiliza EmoEngine.
Tabla 10 Matrices de contingencia para los usuarios P1, P2, P3 y P4.
| Usuario P1 | AM | PF | AC | CM | AE |
|---|---|---|---|---|---|
| AM | 6/20 | 1/20 | 0/20 | 6/20 | 7/20 |
| PF | 0/9 | 1/9 | 6/9 | 1/9 | 1/9 |
| AC | 0/6 | 3/6 | 1/6 | 0/6 | 2/6 |
| CM | 2/15 | 3/15 | 1/15 | 6/15 | 3/15 |
| AE | 1/6 | 1/6 | 2/6 | 1/6 | 1/6 |
| Usuario P2 | AM | PF | AC | CM | AE |
| AM | 8/20 | 3/20 | 5/20 | 4/20 | 0/20 |
| PF | 3/9 | 2/9 | 1/9 | 1/9 | 2/9 |
| AC | 0/6 | 3/6 | 2/6 | 1/6 | 0/6 |
| CM | 2/15 | 5/15 | 2/15 | 5/15 | 1/15 |
| AE | 1/6 | 2/6 | 1/6 | 1/6 | 1/6 |
| Usuario P3 | AM | PF | AC | CM | AE |
| AM | 8/20 | 2/20 | 0/20 | 5/20 | 5/20 |
| PF | 1/9 | 4/9 | 2/9 | 1/9 | 1/9 |
| AC | 0/6 | 2/6 | 2/6 | 2/6 | 0/6 |
| CM | 3/15 | 0/15 | 4/15 | 7/15 | 1/15 |
| AE | 0/6 | 1/6 | 1/6 | 0/6 | 3/6 |
| Usuario P4 | AM | PF | AC | CM | AE |
| AM | 3/20 | 10/20 | 4/20 | 2/20 | 1/20 |
| PF | 1/9 | 5/9 | 1/9 | 0/9 | 2/9 |
| AC | 0/6 | 4/6 | 1/6 | 0/6 | 1/6 |
| CM | 2/15 | 5/15 | 4/15 | 3/15 | 1/15 |
| AE | 1/6 | 3/6 | 2/6 | 0/6 | 0/6 |
Donde: AM: abrir mano. PF: pinza fina. AC: agarre cilindrico. CM: cerrar mano. AE: agarre esférico.
Otra de las posibilidades es que para el usuario sea muy difícil tratar de concentrarse en una acción en especial, sin que el patrón que está asociado a dicha acción sea confundido con otro, esta situación es muy probable, debido a las mismas características de las señales encefalográficas y a su fácil alteración con cualquier estímulo que reciba el usuario.
Después de realizar las cinco pruebas con el sistema y específicamente en las pruebas que involucran la generación de las cinco acciones que se pueden realizar con la mano virtual, y basándose en los indices de desempeño presentados (por ejemplo: menores del 37,5% en la cuarta prueba), que esta BCI (Casco Emotiv + Modulo Cognitivo), no sería el más adecuado a utilizar como interfaz de control de prótesis de mano robóticas colocadas en los pacientes, ya que estos necesitan que su prótesis sea manipulada con un alto porcentaje de confiabilidad y se pueda realizar diversos tipos de agarres que los usuario requieran al manipular su entorno.
5. CONCLUSIONES
En este artículo se presenta el proyecto de manipulación de una prótesis de mano virtual, utilizando señales encefalográficas, lo cual plantea varios retos científicos y se resalta que este tipo de estudios brindan otra forma de manipular las prótesis de mano por parte de personas con discapacidades.
Las cinco pruebas realizadas para determinar el desempeño del sistema arrojan como conclusión que este sistema control (Casco Emotiv + Modulo Cognitivo), no sería el más confiable (porcentajes de éxito en las pruebas con todos los agarres mencionados por debajo del 37,5%) para la manipulación de una prótesis robótica en un paciente, ya que la interfaz de control de este tipo de prótesis, debe presentar al usuario la posibilidad de adaptarse a varios tipos de pre- shaping y de agarres con un alto grado de repetibilidad y reproducibilidad, y lógicamente debe poder realizar los agarres que el usuario requiera para desenvolverse en la vida cotidiana.
Otra razón, por lo cual esta BCI no está lista para la manipulación de una prótesis robótica en un ambiente real (usando solo los pensamientos del usuario), es porque las detecciones del módulo cognitive son alteradas fácilmente por el movimiento de este, implicando que el usuario esté restringido en su movilidad.
Aunque este sistema no es fiable actualmente para la manipulación de prótesis de miembro superior robotizadas, los resultados obtenidos en las pruebas uno y dos muestran avances prometedores de esta nueva técnica, ya que se obtuvieron porcentajes de acierto en el intervalo 67,5 % a 92,5%. De acuerdo a estos resultados, se espera que más adelante, esta técnica pueda constituirse en una alternativa al tradicional manejo de prótesis de mano a partir de señales electromiográficas, y que sean varias las intenciones de movimiento que se puedan detectar con este tipo de interfaces naturales y lógicamente, que se investigue en nuevos algoritmos que puedan ser capaces de clasificar las diferentes intenciones de movimiento o la detección de tareas cognitivas que comandos de manipulación de la prótesis de mano virtual.

