











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Citado por Google
Citado por Google  Similares en
SciELO
Similares en
SciELO  Similares en Google
Similares en Google 
 Permalink
Permalink1. INTRODUCCIÓN
Los sistemas de teleoperación, permiten extender las capacidades sensoriales y de destreza humana para controlar la realización de tareas de un robot llamado dispositivo esclavo, en entornos remotos reales o virtuales. La teleoperación comprende el conjunto de tecnologías que permiten a un operador la realización de tareas a distancia en entornos que conlleven un riesgo al operador o bien sean inaccesibles por éste. Tanto la teleoperación de robots reales como la exploración y manipulación de entornos virtuales está tomando gran importancia dentro de los grupos de investigación en robótica, gracias, entre otras cosas, a las aportaciones de nuevos algoritmos de control basados en el conocimiento de los modelos dinámicos de los dispositivos involucrados y al incremento de la capacidad de cálculo de los computadores actuales1.
Históricamente los sistemas de teleoperación fueron desarrollados a mediados de 1940 para crear capacidades de manipulación de materiales altamente radioactivos. Los teleoperadores permitían al operador humano manejar material radioactivo desde ambientes de trabajo separados por una pared de un metro de espesor, las paredes de concreto absorben la radiación desde el ambiente radioactivo. El desarrollo de los teleoperadores para la industria nuclear culminó con la introducción de sistemas bilaterales maestro-esclavo con reflexión de fuerzas. En estos sistemas exitosos, el brazo del maestro está mecánica o eléctricamente acoplado en el lado remoto a un brazo de geometría idéntica o similar al brazo del maestro que es manipulado por un operador y sigue el movimiento del brazo maestro2.
Otro sector de aplicación de los robots teleoperados es en el control de vehículos sumergibles debido a las extremas condiciones de presión y temperatura, corrientes de agua, etc. Sin embargo, el ejemplo más representativo en el uso de un sistema teleoperado se da en el sector espacial que ha favorecido significativamente la evolución de la teleoperación y de la robótica. Finalmente, en el sector de servicios, se pueden citar aplicaciones de construcción y minería3, mantenimiento de líneas eléctricas4, mantenimiento de instalaciones5, intervención en desastres naturales6 o aplicaciones militares7.
A la par con las investigaciones en robótica autónoma, se desarrollan trabajos en la teleoperación de robots, donde las señales de sensado y el procesamiento de datos son integrados con redes de supercomputadores, y solamente la capacidad de movimiento está ubicada en el robot. Desde hace más de una década, los investigadores han estado usando la Internet como un medio de transmisión de comandos que permiten teleoperar robots y obtener señales de realimentación8.
En el ámbito nacional se encuentran algunos trabajos como el de la Universidad Nacional de Colombia en donde implementaron sistemas de teleoperación para la solución de diferentes problemas en el área industrial, como por ejemplo el diseño y simulación de un algoritmo para el control de un robot manipulador tipo cadena9, en este trabajo se aborda el problema de personal insuficiente para la inspección de oleoductos, mediante un sistema de teleoperación se puede dar solución y además puede reducir el costo para dicha inspección. Investigadores de la Universidad de Pamplona desarrollaron la implementación de una plataforma experimental para un sistema de teleoperación robótico en tiempo real2. Las Universidades del Atlántico y la Pontificia Bolivariana implementaron un laboratorio virtual de control por visión para teleoperar robots en el espacio operacional con acceso remoto para teleoperar y controlar dos robots manipuladores de cinco grados de libertad cada uno, usando las redes RUTA, UNIRED y RENATA10.
En un sistema básico de teleoperación como el de la figura 1, el operador maneja un manipulador maestro para indicar las acciones que debe ejecutar un manipulador esclavo a través de algún tipo de interfaz, ciertos canales de comunicación y sistemas sensoriales. En la zona local un operador humano se encarga de generar los comandos de control para la ejecución de la tarea remota, a través de dispositivos de actuación cuya función es la de transmitir los comandos del operador que son enviados al robot esclavo en la zona remota11. Existen diferentes arquitecturas de teleoperación y cada una se diferencia por la información que se intercambia entre el maestro y el esclavo estas se pueden clasificar en las siguientes categorías12:
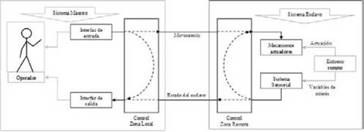
- Esquema posición-posición: la posición del esclavo se determina a partir de la del maestro y viceversa. No hay necesidad de sensores de fuerza.
- Esquema fuerza-posición: la posición del esclavo se determina por seguimiento del robot maestro, y las fuerzas que aparecen sobre el esclavo se miden y se generan en el maestro mediante sus motores. Solo se requiere medida de fuerzas en el esclavo.
- Esquema fuerza-fuerza: las trayectorias del maestro y el esclavo se determinan a partir de las lecturas de fuerzas de ambos. También existe un control local de la posición en ambos robots.
- Esquema cuatro canales: en este caso hay intercambio tanto de fuerza como de posición. El análisis teórico de esta solución refleja que es capaz de proporcionar transparencia infinita.
El robot AL5A es un manipulador didáctico que incluye cinco actuadores de tipo servomotor. En13 se presenta información relacionada con guías de ensamble, control por comunicación RS232 e integración de sensores ópticos en la pinza, para el procesamiento básico de imágenes. Para operaciones autónomas, se ha integrado con cámaras para el reconocimiento de geometrías y colores de objetos14, con lenguajes de programación grafica con LabVIEW bajo el estándar SCPI (Standard Commands for Programmable Instruments) (15, 16). Por su bajo costo, el robot también ha sido integrado como dispositivo esclavo en prácticas de control servovisual17 con cámaras IP y tecnología Kinect. Además, ya ha sido teleoperado con controles del sistema Xbox 360® con protocolo Ethernet18.
Este trabajo presenta el análisis de un esquema de teleoperación posición-posición del brazo robótico AL5A®. Se validan los modelos de descripción cinemática mediante una interfaz gráfica en la cual se puede incluir un algoritmo de optimización. Con el interés de comparar tres tipos de dispositivos maestros, se desarrollan un sistema de teleoperación con la interfaz háptica Novint Falcon™, un teléfono móvil y el dispositivo joystick tipo Gamepad, cambiando además el canal del comunicaciones hacia la zona remota por USB o por XBee®, aspectos que no fueron comparados en trabajos previos.
Como aporte principal se muestra el comparativo de los parámetros de desempeño de cada caso analizado, cambiando el dispositivo maestro o el canal de comunicaciones hacia la zona local bajo un sistema de arquitectura abierta, como aproximación a la teleoperación en entornos industriales integrando nuevas tecnologías de interacción con sistemas computacionales para el control de máquinas. El trabajo corresponde con los resultados de los proyectos: diseño e implementación de un sistema de teleoperación para un robot manipulador de cinco grados de libertad y desarrollo de una plataforma experimental de robótica paralela con tres grados de libertad, códigos SGI 1639 y 1751 UPTC.
2. METODOLOGÍA
2.1 Materiales
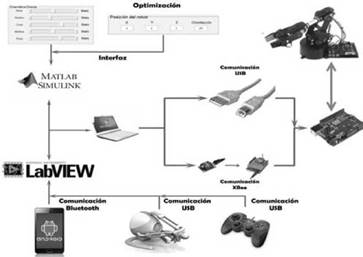
Los elementos utilizados para la implementación del sistema de teleoperación robótica se indican en la figura 2. A continuación se describen según las zonas de operación remota y local.
2.1.1 Dispositivo esclavo en la zona remota: brazo robótico AL5A®
Es un mecanismo de configuración serial producido por Lynxmotion™ mediante un kit de ensamble. El robot indicado en la figura 3, cuenta con cuatro grados de libertad que permiten rotación de la base, movimiento de codo, giro de hombro, movimiento de la muñeca y adicionalmente incluye la apertura o cierre de una pinza como efector final. Sus actuadores son servomotores marca Hitec® con referencias HS422, HS755HB y HS645MG19.

El control de los actuadores del robot AL5A se realizó a través de la integración de la tarjeta Arduino™ UNO aprovechando las disponibilidad de librerías para el control de servomotores mediante los pines configurables como moduladores de ancho de pulso PWM, controlados desde dos aplicaciones software: la primera desarrollada con LabVIEW™ versión 2012 para 32 bits, integrado por la librería LIFA BASE desarrollada por20 y la segunda implementada con Matlab versión 2014a para 64 bits a través de la librería ArduinoIO21 en el sistema operativo Windows® 7 Professional.
Los rangos de operación de voltaje para los servomotores fueron de 4,8 a 6V, con un consumo máximo de 0,45A, por lo cual se agregó una etapa de potencia entre la tarjeta Arduino UNO y los motores. Él envió de señales de control para la etapa de potencia se realizó por puerto USB y además se incluyó un módulo XBee® para la comunicación inalámbrica con una zona local, el cual cuenta con su propio protocolo de comunicación por radio frecuencia adaptables tanto al computador por conexión USB como a Arduino UNO, con especificaciones XBee® ZB 2mW Wire Antenna - Series 2 (Mesh)22.
2.1.2 Dispositivos maestros en la zona local
- Interfaz Háptica Novint Falcon™: es un dispositivo de arquitectura paralela, fabricado por Novint Technologies Inc.23, para interacción en escenarios tridimensionales, con realimentación de fuerzas de hasta 8N con un espacio de trabajo de 0.10m en cada eje y una resolución de posición mayor a 400 dpi. Fue diseñado inicialmente para aplicaciones de entretenimiento, videojuegos o sustitución de periféricos como el ratón o el joystick y por su bajo costo se ha convertido en el pionero en la categoría de productos hápticos para el mercado de consumo, integrándolo fácilmente en aplicaciones de realidad virtual y sistemas teleoperados con fines académicos o científicos desde niveles de educación media24 o en pruebas de sistemas de control avanzado25.
- La interfaz háptica se integró con el uso del HDAL SDK o Kit de desarrollo para el dispositivo Novint Falcon™, que contiene toda la documentación y los archivos de software necesarios para desarrollar aplicaciones con el dispositivo háptico desde la capa de abstracción HDAL (Haptic Device Abstraction Layer) con el lenguaje de programación C y C++. Las funciones básicas para lectura de posición y entradas digitales, se convirtieron a bloques de instrumentación virtual VI para LabVIEW™ basado en el trabajo presentado por26.
- Dispositivo móvil: se utilizó la aplicación AndroView Free34 desarrollada por27 que trasmite los datos de sensores de un dispositivo móvil con sistema operativo Android a un computador que cuente LabVIEW™, permitiendo la integración de controles, detección de los puntos tocados en la pantalla, lectura de acelerómetros, indicaciones de orientación y proximidad, mediante comunicación por Bluetooth. Los dispositivos móviles ya han sido integrados en sistemas de teleoperación como el aporte de28 en la que a partir de una aplicación en el sistema operativo Android se controla el robot industrial Kuka KR-6.
- Joystick tipo Gamepad: se utilizó un control genérico compatible con PC por puertos USB 2,0 y 1,1, el cual contó con doce botones de acción programables, dos palancas análogas, un botón de dirección, un interruptor análogo, un LED indicador de funcionamiento y una función D-Shock para efectos de vibración. Para su integración como dispositivo de control, se usó la herramienta de LabVIEW™ para la detección de controles tipo joystick y su lectura de los diferentes pulsadores del control y de las palancas analógicas en el lenguaje de programación gráfico G.
2.2 Métodos
2.2.1 Modelamiento del Robot AL5A
Para que un robot realizara una tarea específica de ubicación, se consideraron dos métodos para encontrar la posición del efector final, mediante un análisis de cinemática directa especificando los ángulos de cada eslabón y de cinemática inversa, indicando la posición y orientación del efector final, para encontrar los ángulos en los eslabones según se muestra en la figura 4, con xi, yi y zi las coordenadas del punto tomado como referencia para el eslabón i.
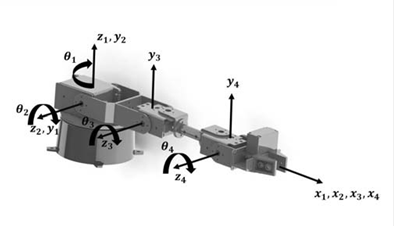
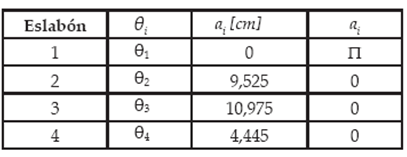
- Cinemática directa: con el fin de controlar el efector final respecto a la base, fue necesario determinar la relación entre los sistemas de coordenadas adjuntos al efector final y a la base obtenidos mediante los parámetros Denavit y Hartenberg (DH) (13), mostrados en la tabla 1 con un desplazamiento de la articulación b nulo para cada caso, 0¡ ángulo de cada articulación, a. longitud de cada eslabón y a¡ el ángulo de torsión.
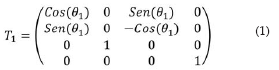
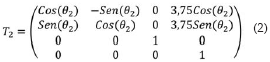
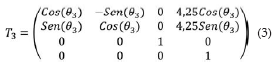
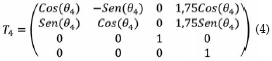
Con base en los parámetros DH se obtuvieron las cuatro matrices de transformación homogénea tal como se indica en las ecuaciones 1 a 4, para definir la posición y orientación de cada uno de los eslabones del robot AL5A con respecto al eslabón inmediatamente anterior.
La posición y orientación del efector final con respecto a la base se obtuvo de la multiplicación de las matrices anteriores, como se presenta en la ecuación 5.

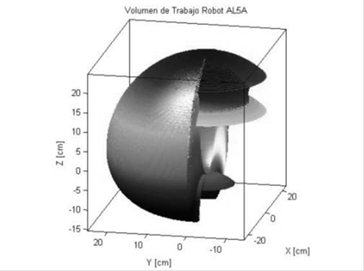
A través de un algoritmo de iteraciones en Matlab® se realizó un barrido de valores para los ángulos de acuerdo a los rangos establecidos en la tabla 1 con θ 1 correspondiente a movimiento de base, 𝜃 2 al hombro, 𝜃 3 al codo y 𝜃 4 a la muñeca del robot. Con lo cual se pudieron establecer las posibles posiciones de la pinza como efector final, mediante la aplicación de la matriz de transformación de la ecuación 5, considerando el volumen de trabajo del robot mostrado en la figura 5.
- Cinemática inversa: conociendo el ángulo con el cual se quiere orientar la pinza Φ (ver figura 6) y la posición a la cual se llegará (x, y, z), mediante transformaciones geométricas se determinaron los ángulos de cada uno de los eslabones para alcanzar un punto en específico, siempre que dicho punto se encontrara dentro del volumen de trabajo. A partir del análisis de la figura 6, conociendo el punto (x,y) se recurrió a la proyección sobre la línea R, obteniendo la distancia R y el ángulo 𝜃 1 (ver ecuaciones 6 y 7).


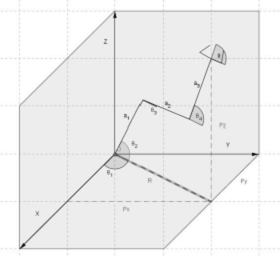
Para encontrar los valores de los ángulos de articulaciones restantes del robot, conociendo además las longitudes de cada eslabón, se consideró un sistema con las ecuaciones 8, 9 y 10, para solucionar las incógnitas 𝜃 2 , 𝜃 3 y 𝜃 4



2.2.2 Validación del modelo con Matlab®
Tomando como bases las ecuaciones planteadas para el modelamiento cinemático del robot, se desarrolló una interfaz gráfica de usuario con Matlab® para el control por medio de barras deslizantes incluyendo dos funciones: cambio del ángulo de cada articulación por medio de un algoritmo de cinemática directa y espacios de ingreso de texto para definir posiciones especificas establecidas de la pinza considerada como el efector final del robot. La imagen principal de la interfaz desarrollada se encuentra en la figura 7. Se implementó una cámara para visualizar el entorno remoto y un entorno de realidad virtual para animar los desplazamientos del robot mediante la conversión de archivos de ensamble en SolidWooks (*.xml) en conjuntos geométricos a los cuales se les aplicaron transformaciones de desplazamientos y rotaciones definidas como entradas de cada eslabón conectado a un respectivo bloque de Simulink®.
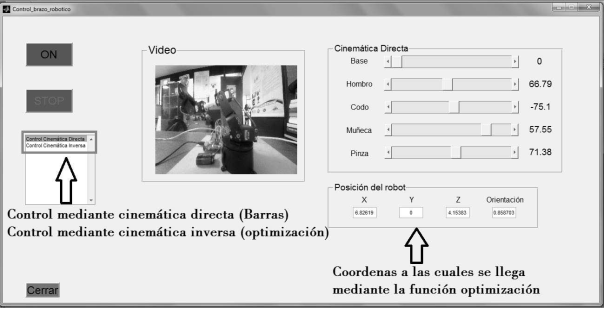
Del estudio de la cinemática inversa, las raíces para determinar cada uno de los ángulos pueden ser positivas o negativas por lo que habrá más de una solución para una posición particular en el efector final. Por tanto, cada vez que el usuario del interfaz indicaba una posición de llegada para la pinza, automáticamente se ejecutaba un algoritmo para obtener los valores mínimos de los ángulos de cada articulación, mediante una función de optimización no lineal con restricciones implementada con la función Fmincon de Matlab. La función objetivo que se indica en la ecuación 11, se consideró a partir de la sumatoria de las ecuaciones 9 y 10, ya que las posiciones x e y se obtuvieron a partir de R.

Las restricciones de desigualdad, correspondieron con los rangos de posiciones angulares medidas para cada eslabón según la tabla 2.
2.2.3 Técnicas de teleoperación del robot AL5A
Con el fin de establecer el comportamiento del sistema de teleoperación bajo diferentes parámetros, se implementó la interfaz de control en LabVIEW™ cambiando el dispositivo maestro en la zona local y el canal de comunicación empleado en la zona remota para el control del robot, con tres dispositivos maestros: Novint Falcon™, GamePad y Dispositivo móvil; interactuando con dos canales de comunicaciones que se compararon en función de la correspondencia de volúmenes de trabajo, tiempo de respuesta para el seguimiento de posición, consumo de recursos y facilidad de operación.
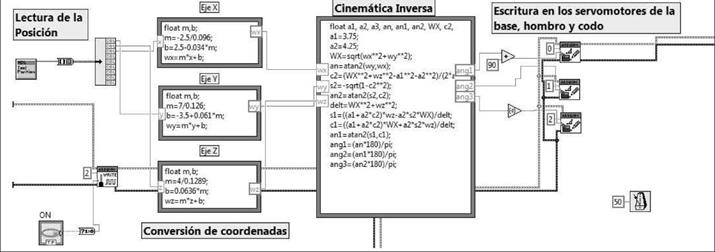
Con los dispositivos maestros, se obtuvo información espacial para ubicar el efector final de robot. A partir del análisis de cinemática inversa de la sección 2.2.1 se generaron las posiciones angulares de cada actuador del robot, que se enviaron como comandos a los motores a través del esquema de comunicaciones por USB o XBee® para que finalmente se comandaran los servomotores en una tarjeta Arduino® Uno. En la figura 8 se indica una sección del código desarrollado.
3. RESULTADOS Y DISCUSIÓN
3.1 Teleoperación con maestro: Novint Falcon™
La interfaz háptica Novint Falcon™ permite leer la posición (x-y-z) del efector final en su espacio de trabajo y enviar esta información a LabVIEW™. Con estas coordenadas y mediante el análisis de cinemática inversa en el robot (ecuaciones 6 a 10), se controlan los eslabones de la base, el hombro y el codo considerando las transformaciones de acuerdo a los rangos máximos y mínimos del volumen de trabajo para el robot.
El volumen efectivo de desplazamiento con la interfaz se muestra en la figura 9a, en la cual se aprecia la intersección de su volumen de trabajo dentro del espacio efectivo de posicionamiento del robot, lo que permitió ubicar el efector final en cualquier posición dada por el dispositivo maestro.
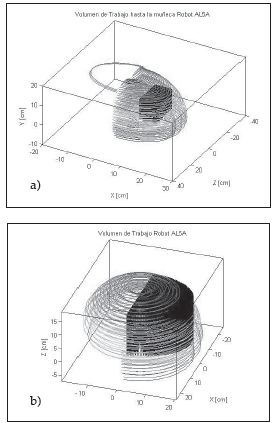
Figura 9 Intersección de volúmenes de trabajo de dispositivos maestros (bloque negro) comparado con volumen del robot. a) Control con Novint Flacon™ y b) control con teléfono móvil.
La interfaz gráfica de control (figura 10a) informa sobre las posibilidades de rotación de la muñeca y apertura o cierre de la pinza según la interacción con los botones del háptico. Se permitió elegir los canales de comunicación hacia el robot por USB configurando la opción VISA resource o protocolos inalámbricos como Bluetooth o XBee®.
3.2 Teleoperación con maestro: dispositivo móvil
Mediante la lectura de la posición de contacto en la pantalla táctil y del uso del sensor de inclinación, se comandaron las articulaciones del robot. A partir de una transformación lineal se convirtieron las coordenadas de contacto en el plano de la pantalla táctil, como coordenadas x e y del efector final del robot, lo que permitió que a través de un análisis de cinemática inversa, se pudieran encontrar los ángulos 𝜃 2 y 𝜃 3 . Las variaciones de rotación para muñeca y base se generaron por la inclinación del dispositivo móvil. Para limitar los valores de posiciones, se obtuvo la intersección del volumen de trabajo del robot (figura 9b) con el volumen obtenido por el plano de la pantalla táctil.
La interfaz gráfica de usuario desarrollada para el dispositivo móvil (figura 10b), realimentó la posición angular de cada articulación del robot, posición y ángulo de orientación del efector final y video del desempeño del robot. La interfaz permitió elegir los canales de comunicación hacia el robot por USB configurando la opción VISA resource o protocolos inalámbricos como Bluetooth o XBee®.
3.3 Teleoperación con maestro: GamePad
El maestro tipo GamePad se utilizó para el control del robot mediante las dos palancas análogas y dos botones (ver figura 10c). La palanca análoga de la izquierda controla la velocidad del hombro y la apertura de la pinza, la palanca de la derecha controla la rotación de la base y la muñeca. El control del ángulo de la base, hombro, muñeca y pinza se realizó multiplicando la variación de la palanca y el tiempo de repetición en la ejecución del ciclo y por último el movimiento del codo se comandó mediante la pulsación de botones. De igual manera que con el dispositivo móvil también se permitió el desarrollo de un volumen de controlado por el GamePad acorde con el espacio real de desplazamiento del robot.
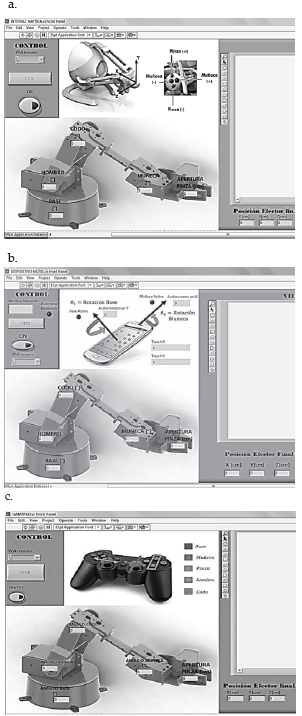
Figura 10 Interfaces de usuario generadas. a) Novint Falcon™. b) Telefono móvil. c) Control Joysctick.
La interfaz desarrollada para la integración del GamePad permitió configurar la comunicación por USB con la opción VISA resource o el protocolo inalámbrico Xbee\Coordinador.
3.4 Parámetros de desempeño de las interfaces de usuario desarrolladas
En la tabla 3 se presenta un comparativo de los parámetros de desempeño de las aplicaciones de teleoperación desarrolladas comparándolas en función de la correspondencia de volúmenes de trabajo, tiempo de respuesta para el seguimiento de posición, consumo de recursos y facilidad de operación. El control de posición se realizó en lazo abierto.
Tabla 3 Técnicas aplicadas para la teleoperación del robot AL5A con LabVIEW.
| DISPOSITIVO MAESTRO EN ZONA LOCAL | CANAL COMUNICACIONES EN ZONA REMOTA | CORRESPONDENCIA DE VOLÚMENES DE TRABAJO | RETARDO DEL ESCALVO PARA SEGUIMIENTO DE POSICIÓN | CONSUMO DE RECURSOS CPU | CONCEPTO DE OPERACIÓN |
|---|---|---|---|---|---|
| Novint Falcon™ | USB o XBee | Completo | 0,099s con USB 0,48s con XBee | 0,52% USB 6,74% XBee | Completa correspondencia para interacción en tres dimensiones con USB. Alta sensación de inmersión. |
| Dispositivo móvil | USB o XBee | Restringido, con rotaciones programadas | 0,025s con USB 1,03s con XBee | 0,68% USB 4,14% XBee | Correspondencia para interacción en tres dimensiones con USB. Alta sensación de inmersión. |
| GamePad | USB o XBee | Restringido, con rotaciones programadas | 0,03s con USB 0,64s con XBee | 0,38% USB 4,56% XBee | Correspondencia en seguimiento de posición. Por la inclusión de un giróscopo, permite interacción real al maestro en tres dimensiones |
Con el maestro Novint Falcon™ se permite una interacción manual tridimensional con mayor sensación de inmersión de un operador, ya que al posicionar el cursor háptico, simultáneamente se mueve el efector final del robot, a partir del uso del modelo matemático de cinemática inversa para el cálculo de los ángulos a aplicar en cada articulación. En este caso se realiza un esquema de control en lazo abierto de posición-posición por entrada directa de coordenadas cartesianas en la zona local, limitando los valores obtenidos matemáticamente según los rangos de operación segura según lo indicado en la tabla 2. Sin embargo, no se incluyen grados de libertad rotacionales directos para la pinza y la muñeca, sino que tienen que implementarse por la presión de pulsadores.
En el caso de la interacción con el dispositivo móvil como maestro en la zona local, se presentó una condición mixta para el control de posición incluyendo el análisis por cinemática inversa para el cálculo de dos articulaciones y entrada directa para las variaciones de base y muñeca del robot. Lo cual simplifica los cálculos y disminuye los tiempos de ejecución, sin embargo disminuye la sensación de inmersión del operador exigiendo que defina simultáneamente desde el dispositivo móvil, coordenadas de posición y ángulos de rotación.
Usando el dispositivo GamePad se aportan entradas directas para los ángulos de cada articulación del robot esclavo, por tanto no se requiere ejecutar el modelo matemático de cinemática inversa, disminuyendo los tiempos de ejecución de software. Sin embargo, el usuario en la zona local no tiene una sensación de control de posición por ingreso de coordenadas donde se ubicará el efector final del robot, sino que tiene que debe llevarlo a un punto en el espacio, por la variación individual de cada articulación.
Con respecto a los tiempos de respuesta, son notorios los retardos en el seguimiento de posición para la comunicación inalámbrica por XBee®, lo que permite descartarla como canal hacia la zona local independientemente del maestro usado. Sin embargo, se requieren explorar otras opciones de comunicación inalámbrica que permita establecer canales de comunicación a cualquier distancia entre la zona local y remota.
El consumo de recursos del computador en la zona local no es crítico, lo que indica que el software LabVIEW™ escogido para el desarrollo de las interfaces de usuario, fue adecuado considerando además la facilidad de programación bajo el lenguaje gráfico. La inclusión de Matlab permitió contrarrestar los modelos matemáticos de cinemática y aunque se consideró para interactuar con el dispositivo maestro Novint Falcon a través de la integración de la librería HaptiK29. Esta opción arrojó un porcentaje de uso de la CPU del 16,5% con 22,5s en retardo de respuesta, por lo cual también se descartó inicialmente como interfaz de control.
Mediante el uso de Matlab® como interfaz de usuario, fue posible integrar características de modelamiento y optimización pero un consumo de recursos con uso de CPU del 16,55% y un tiempo máximo de ejecución de recursos de 225ms, que hicieron descartarlo como software de programación para la interfaz de control en la zona maestra.
4. CONCLUSIONES
Mediante el modelo mecánico desarrollado para el robot AL5A, se atendieron las necesidades de control requeridas por el sistema de teleoperación de posición a partir del análisis cinemático directo e inverso que permitió controlar la posición de la muñeca del robot desde de las órdenes de movimiento indicadas por tres tipos de dispositivos maestros.
El uso de la interfaz Novint Falcon™ como dispositivo maestro, fue la estrategia que aportó un mayor nivel de inmersión en la zona local, por el efecto de un movimiento tridimensional desde la estación de teleoperación local con entrada directa de coordenadas de posición y además por facilitar la inclusión de sensaciones de realimentación de contactos que ampliaron el esquema de control bilateral.
La comunicación hacia la zona local con protocolo XBee® presentó altos retardos de respuesta, por lo que se descartó este canal de comunicación en el sistema de teleoperación desarrollado, ya que no garantizó el seguimiento de posición del robot esclavo en tiempo real.

