











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Cited by Google
Cited by Google  Similars in
SciELO
Similars in
SciELO  Similars in Google
Similars in Google 
 Permalink
Permalink1. introducción
Uno de los principales daños de las estructuras de pavimentos ante condiciones de carga y clima es la deformación permanente, cuya manifestación son on dulaciones en la vía, que pueden generar accidentes y dañar el pavimento aceleradamente. Por tal motivo, es importante poder generar el fenómeno en el laborato rio, de tal manera, que se pueda reducir al mínimo el efecto en la obra a escala real 1.
Con base en esta problemática se realizó una investi gación de los equipos existentes que han sido desa rrollados en el mundo y las variables estudiadas en el fenómeno de la deformación permanente. Entre los equipos más utilizados se encuentra el equipo desa rrollado en Georgia Loaded WheelTester (GLWT), el cual simula cargas de 445N por medio de una rueda que es presurizada por una manguera. Para generar la condición más desfavorable que sufre un pavimento y controlar la temperatura del ensayo, la probeta es sumergida en agua que varía entre 40 y 50°C y el tiem po de duración del ensayo es de 120 minutos 2. Otro equipo existente en los laboratorios de pavimentos es el Asphalt Pavement Analyzer (APA), capaz de eva luar la deformación permanente, la fatiga y la resisten cia a la humedad. Esta máquina se diseñó a partir de una modificación de la máquina de Georgia GLWT 3. Otra modificación del equipo GLWT es el Hamburg Wheel-Tracking Device (HWTD), desarrollado en Hamburgo y que permite realizar ensayos en tiempo real en dos probetas por medio de dos ruedas con un movimiento oscilatorio 4. Así mismo, el laboratorio de la Universidad de Purdue, creó el Wheel-Tracking Device que puede determinar el ahuellamiento po tencial y la sensibilidad a la acción de humedad 5. En Francia, se construyó el French Pavement Rut ting Tester que permite determinar la sensibilidad al ahuellamiento en mezclas asfálticas en caliente con un movimiento de vaivén, controlando la presión y otras variables por medio de un panel 6.
Por último, la Model Mobile Load Simulator (MMLS3), desarrollado en Sudáfrica, simula ensayos a escala 1/3 7.
Como resultado del estudio bibliográfico de los equi pos existentes para determinar la deformación per manente en pavimentos, mostró que las principales variables de estudio son: temperatura, pasadas por minutos y presión 8. Tomando en cuenta los equipos tanto construidos por laboratorios como los comercia lizados por las empresas, se desarrolló una investiga ción concentrada en diseñar, construir e instrumentar un equipo para pavimentos cuyas características re presentan las variables a las cuales es sometido un pa vimento flexible como: temperatura, carga, humedad, radiación UV entre otras condiciones medioambienta les. Así mismo crear una interface entre el usuario y el equipo para monitorear y controlar las variables del ensayo en tiempo real.
2. metodología
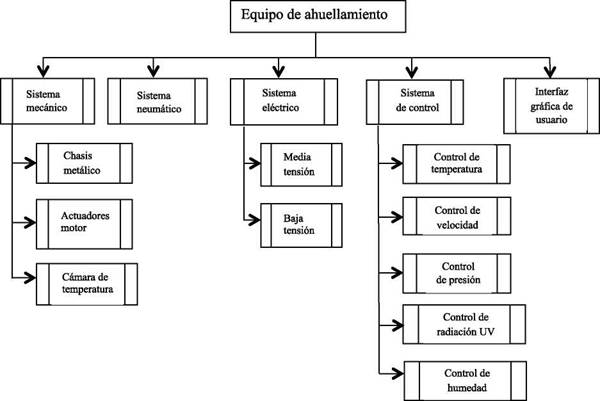
La metodología desarrollada para el diseño, cons trucción e instrumentación del equipo, consistió en 5 etapas principales. La primera fase correspondió al diseño mecánico de la estructura, la segunda fase fue el diseño neumático de la transmisión de cargas y adi cionalmente se desarrolló los moldes para las distintas formas de las muestras de pavimentos que pueden ser analizadas. La tercera fase fue el sistema eléctrico de media y baja tensión. La cuarta etapa fue el sistema de control de temperatura, velocidad, presión, radiación UV y humedad. La última fase fue la interfaz gráfi ca de usuario la cual fue diseñada en LabView(r). Para el desarrollo de los mecanismos utilizados para esta máquina se realizaron los siguientes sistemas, como se observa en la figura1.
DISEÑO MECÁNICO
Los materiales para la estructura del ahuellador con sisten principalmente en:
Chasis metálico
Se desarrolló una estructura con perfil CR calibre 16,4 cm por 4 cm y recubierta con pintura electrostática, diseñada en el 2005 pero se reforzó y modificó en el desarrollo de la automatización para soportar las vi braciones del motor y el peso de los elementos como la excéntrica, cámara de temperatura y otros elementos.
2.1.2 Sistema de acople motor
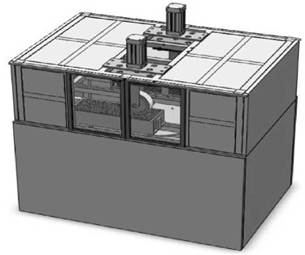
Para la transmisión de movimiento se diseñó un sis tema que realiza un movimiento rotacional generado por un motor trifásico Nord de 1,5 kW y por medio de un acople flexible tipo araña al eje del motor, este mis mo es conectado a una excéntrica de 655 mm de diá metro que transforma el movimiento lineal por medio del acople flexible a las prensas donde se colocará las diferentes muestras de 300 mm por 50 mm por 50 mm. Las prensas están unidas a la excéntrica por medio de rodamientos de cojinetes de bolas, los cuales a su vez están apoyados en otros puntos permitiendo que se deslicen sobre las guías creando así un movimiento lineal. En la figura 2 se puede observar la estructura metálica y los cilindros acoplados con un par de rue das de caucho.
2.1.3 Cámara de temperatura
En la parte superior del chasis se colocan la cámara de temperatura y las muestras, además esta revestida por fibra de vidrio, que permite un mejor aislamiento por sus propiedades térmicas 9, permitiendo con servar el calor interior de la cámara hasta 70°C. De igual manera, se instalaron en la platina superior con revestimiento de asbesto, dos resistencias de 1800W a 220V conectadas en serie para reducir el consumo de corriente a 7,5A, la temperatura al interior de la cáma ra es monitoreada a través de 4 termocuplas Tipo J a la misma altura de las muestras asfálticas. Estas resis tencias anteriormente descritas se activan y desactivan por medio de un relé de estado sólido.
2.2 DISEÑO NEUMÁTICO
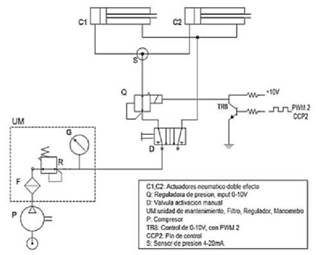
El sistema neumático descrito en la figura 3 está con formado por dos cilindros neumáticos con una presión máxima de 16 bares, un émbolo de 80 mm de diámetro y un recorrido de 100 mm, una válvula reguladora de presión de 0-145 PSI con una entrada de 0-10V direc tamente proporcional, una unidad de mantenimiento, un filtro, un regulador, y un sensor de presión el cual permite realizar un control de presión al sistema de forma automatizada.
Las características del ensayo requieren ejercer dife rentes cargas a las muestras asfálticas, debido a esto se diseñó un sistema neumático, con un componente manual que es una válvula reguladora de presión de 5 vías con una variación de presión 0,6 Mpa y 1,2MPa.
2.3 Diseño ELÉCTRICO
Para el manejo del flujo de corriente eléctrica, se divi dieron las actividades en media y baja tensión, como se muestra a continuación:
2.3.1 Media tensión
Se desarrolló un circuito para el manejo de la red tri fásica, compuesto por un totalizador Legrand de 40 amperios, un contacto de retención, el cual se encarga de energizar el variador de velocidad, una fuente DC de 24 voltios que alimenta el circuito de acondiciona miento y control de la máquina, un relé de estado só lido que activa las resistencias dentro de la cámara de temperatura, como se muestra en la figura 4.
2.3.2 Baja tensión
Para este diseño se desarrollaron circuitos que permitie ran el manejo de la automatización y la adquisición de datos de los sensores. Los circuitos desarrollados fueron:
Circuito de control: este circuito cuenta con un PI- C18F4550, el cual se comunica con el PC por medio de RS232, también se conecta una LCD, el PIC ge nera 2 señales del PWM, una para el variador de velocidad y la otra para la válvula reguladora de presión del sistema neumático, además de generar las señales para los actuadores y los relés.
Circuito de acondicionamiento: para las señales de los sensores de mV a V, se realizó una etapa de amplificación y acondicionamiento. Se utilizaron amplificadores de instrumentación como: AD626 y LM324. Además de filtros pasa bajos para dismi nuir las perturbaciones en la señal.
Circuito de potencia: teniendo en cuenta que algu nos elementos como los relés necesitan entradas de 10, 12 o 24V, se realizó una configuración de transistores para garantizar el voltaje necesario de 110V.

DISEÑO DEL SISTEMA DE CONTROL
Para el tipo de ensayos que se requieren en un equipo de deformación permanente se realizaron varios con troles:
2.4.1 Control de temperatura
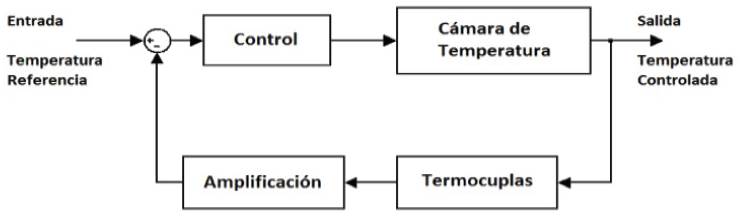
Para controlar la temperatura de la cámara se usó como actuadores 2 relés de estado sólido para activar las resistencias de 1800W y como sensores se utiliza ron 4 termocuplas Tipo J, la amplificación de la se ñal se realizó por medio de circuitos análogos como LM324 y finalmente el control se implemento en un microcontrolador PIC 18F4550 como anteriormente se describió. Como bucle de control se tiene el diagrama de la figura 5.
Para controlar la temperatura de acuerdo a los pará metros del ensayo se tomaron los datos de entrada y salida de la planta, estos datos fueron cargados en el módulo Ident de Matlab (10) y fue aproximado el com portamiento a una función de transferencia de primer orden, pero debido a que el actuador funciona como un dispositivo ON/OFF, se decidió hacer un control ON/OFF (11) con una histéresis de ± 3 °C. La función de transferencia de primer orden fue (1):
2.4.2 Control de Velocidad
Para garantizar el número de pasadas por minuto que hacen las prensas al moverse con un PWM dado al variador, se planteó implementar un sistema de control, que actuará durante el desarrollo del ensayo o proceso de ahuellamiento en mezclas asfálticas. Del análisis se obtuvo una función de transferencia aproximada de esta planta, se tomaron datos de la entrada y la salida, se cargaron en Ident de Matlab y se aproximó la solu ción a una función de segundo orden.
De otra parte, se diseñó un controlador PI digital 12 el cual estará actuando sobre el variador de velocidad, cambiando la señal del PWM, asignado a este. La reali mentación del sistema se obtendrá con la cantidad de pa sadas por minuto que son captadas por medio del sensor efecto hall y cuyas constantes del controlador fueron cal culadas por el método en lazo abierto de Ziegler-Nichols (13), obteniendo la función de transferencia (2):

2.4.3 Control de presión
El control de presión se diseñó para regular la carga que tendrá el actuador en el sistema neumático y por ende, la muestra de pavimento a ensayar. El sistema fue identificado con la herramienta de Ident de Matlab y se obtuvo una función de transferencia de segundo orden, su respuesta a una entrada escalón garantiza que sea estable y por tal motivo, se diseñó un controlador PI digital, el cual varia el valor de la señal PWM asignado para cambiar el voltaje de entrada a la válvula regula dora de presión, esta variación es capturada por el sen sor de presión NOSHOK de 0 a 100 PSI con una salida de 4-20mA. El proceso descrito anteriormente y que entrega señal a la entrada de los cilindros neumáticos con sensores tipo strain gauge, recorrido de 26 mm y una salida de 0-62mA, permiten medir la deformación de la muestra y cierra el lazo de control. Finalmente, las constantes del controlador fueron calculadas por el método en lazo abierto de Zieger-Nichols, obteniendo la función de transferencia del sistema (3):
2.4.4 Control de radiación UV
Para controlar la radiación UV-A, se utilizaron 4 lám paras de 300 mm y se realizó un control ON/OFF por medio de relés de estado sólido, tal como se muestra en la figura 6.


2.5 Interfaz gráfica de usuario
Para realizar el proceso de automatización y ejecución del ensayo, se desarrolló una interfaz gráfica de usua rio en LabView(r) 14 para controlar y visualizar el proceso del ensayo de ahuellamiento de una manera sencilla y en tiempo real 15. La interfaz desarrollada (figura 8) 16 es una aplicación que monitorea las va riables de control y las señales de los sensores, además durante el ensayo se tiene la capacidad de modificar los parámetros de referencia de presión, temperatura, pasadas por minuto y tiempo de duración 17. Una vez se definen los parámetros iniciales (temperatura, presión etc.), se despliega un cuadro de dialogo en donde se solicita definir el nombre y ubicación para guardar el archivo que recopila la información del ensayo 18. Acto seguido, se inicia el proceso de pre calentamiento de las muestras y la graduación de la temperatura del ensayo por un periodo de 2 horas, tal como lo establecen las normas de ensayo.

La interfaz se divide en cuatro paneles principales, en los paneles uno y dos se monitorea la deformación de las muestras 1 y 2 respectivamente con respecto el tiempo. El tercer panel establece y visualiza los pa rámetros de presión en el sistema neumático, la tem peratura de la cámara, el número de pasadas por mi nuto, los interruptores del ventilador y lámpara de la cámara y el tiempo del ensayo 19. En el cuarto panel se determina la configuración del puerto COM, que conecta el cable RS232, que a su vez está conectado al microcontrolador, que grafica las variables de tempe ratura, pasadas por minuto y presión con respecto al tiempo. Finalmente, este último panel visualiza la fi nalización del tiempo de precalentamiento y ejecución del ensayo 20.
3. RESULTADOS Y DISCUSIÓN
Una vez diseñado, construido e instrumentado el equipo de ahuellamiento para pavimentos flexibles, se realizaron pruebas con múltiples probetas, las cuales fueron sometidas a diferentes cargas (600kPa -650kPa), temperaturas (40°C-70°C), radiación UV a 325 µm y humedad (20 a 90%). Es importante resaltar, que se realizó el proceso de preacondicionamiento de las muestras, consistente en calentar la cámara de tem peratura durante 2 horas y realizar el ensayo en las si guientes 2 horas. En la figura 9, se observa la muestra ensamblada en la máquina.

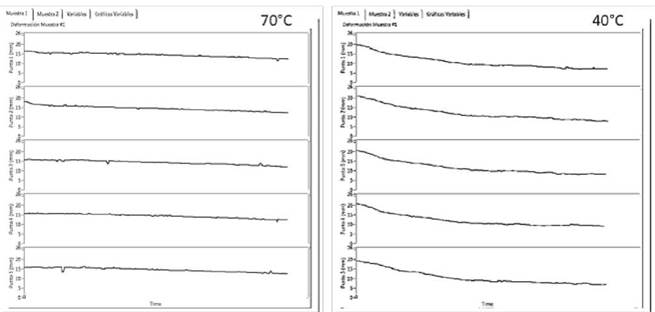
Durante la ejecución de los ensayos se adquirieron los datos de las variables a estudiar, como se muestra en la figura 10. De los resultados se observa la deforma ción plástica del pavimento flexible respecto al tiempo y la temperatura (las primeras pruebas se desarrolla ron bajo temperatura de 40°C y las segundas pruebas a 70°C). Dentro de las pruebas desarrolladas, se iden tificaron pequeños fragmentos de roca de la granulometría de las muestras ensayadas, las cuales causan las irregularidades presentadas en las gráficas y esta blecen la sensibilidad de los sensores y el buen fun cionamiento del equipo, irrelevantemente se generen cambios leves en la deformación.
4. CONCLUSIONES
Con base en un estudio nacional e internacional de los equipos existentes de deformación plástica para pa vimentos flexibles, se diseñó y construyó un equipo cuyo principal aporte es brindar la ejecución de ensa yos bajo especificaciones de normas técnicas naciona les e internacionales, que a su vez permitan controlar no solo la temperatura, presión y frecuencia, sino la humedad relativa y radiación solar, variables que afec tan significativamente el deterioro del pavimento y no las tienen los equipos existentes. Así mismo, dicho equipo brindará la posibilidad de adelantar nuevas investigaciones al interior de la universidad, aportando al conocimiento del daño por humedad y radiación solar de pavimentos flexibles.
De otra parte, se desarrolló un sistema de aplicación de carga por medio de cilindros neumáticos accionados por medio de una válvula proporcional que permiten gene rar una presión constante sobre las muestras durante el ensayo, siendo novedoso y obteniendo mayor precisión de la deformación de las muestras, según ensayos eje cutados. Así mismo, el sistema de deformación desarro llado no solo establece la deformación de muestra en la parte central, sino, en diferentes partes y en tiempo real, característica que no presenta los otros equipos existen tes y son objeto de investigación y análisis. Finalmente, se desarrolló una interfaz gráfica de usuario, la cual per mite visualizar en tiempo real la deformación perma nente en las muestras y control sobre las variables del ensayo. Por último, se observó la influencia de la tem peratura, radiación UV y humedad en las muestras del pavimento flexible, encontrándose mayor deformación a mayor temperatura (deformaciones superiores al 15% al incrementar entre 5 y 10°C la muestra), mayor rigidez de la muestra en la medida que la radiación solar se in crementa (incremento de la resistencia entre 8 y 14% al incrementar la radiación solar en un 25%) y mayor dete rioro de la mezcla asfáltica (17 y 23%) al tener humeda des relativas iguales o superiores al 85%.
AGRADECIMIENTOS
Los autores agradecen a la Universidad Militar Nueva Gra nada en especial a la Vicerrectoría de Investigaciones por el apoyo económico a través del proyecto IMP-ING-2132.

